作戰計劃生成中的理論與技術問題:一種綜合視角
2016-11-02 01:51:50黃紅兵李賢玉王學寧張桂元
指揮與控制學報 2016年2期
黃紅兵 李賢玉 王學寧 張桂元
1.火箭軍裝備研究院北京100094
作戰計劃在軍事行動中處于核心位置,是指揮決策最重要的內容,是作戰行動的基本依據,常常決定著軍事行動的成敗.同時,指揮控制的主要任務也是圍繞作戰計劃的生成、執行、監控、調整等一系列活動展開.正因為作戰計劃的特殊地位,作戰計劃生成可能是軍事領域研究得最多的問題之一,涉及其過程、任務、方法等研究的文獻浩如煙海,其中的理論與技術問題也層出不窮、不一而足.或許也正因如此,對這一問題的把握常常難以兼顧深度和廣度,很容易就事論事,難以在一個更廣闊的背景下考慮問題,或者泛泛而談,不能在一個更深的層次上揭示問題的內在結構.
兼顧作戰計劃生成問題的廣度和深度,本文以一種綜合的視角考察其中涉及的諸多理論與技術問題.首先,就其內容看,作戰計劃是客觀軍事規律與主觀作戰目標的綜合體.一個科學可行的作戰計劃,必定是立足于客觀軍事規律,利用現有軍事資源,一步一步導向所期望的戰略、戰術目標,脫離客觀規律的作戰計劃只能是空中樓閣.所以,作戰計劃生成的前提是把握作戰系統的基本規律.但是作戰系統是一種非常典型的復雜系統[1?4],從古到今其基本規律只有少數軍事家能參透,并且隨著戰爭形態的演變,作戰系統的內部結構和活動規律都有著很大的變化,越來越復雜,形成了巨大的作戰體系.基于這些考慮,對這些客觀規律問題的探究,在一定程度上也應納入作戰計劃生成的研究視野中,并且運用到作戰計劃生成過程和評估過程之中.其次,就其過程看,作戰計劃生成交織著各個指揮層次、各種作戰要素的計劃生成過程,是一個綜合協作過程.協調這些過程,并保證這些計劃的一致性和完備性,是作戰計劃生成研究首先要解決的問題.同時為應對快速變化的戰場態勢,保證作戰計劃生成的快捷性,自動化、智能化的生成技術必不可少.最后,就其結果看,作戰計劃生成的產品,能不能指導或驅使作戰單位達成作戰目標,能不能應對多種不同的挑戰,能不能適應各種不確定性,滿不滿足相應的約束,等等,都需要進行綜合評估.這就需要有相應的評價指標、評估模型和評估方法來提供支撐,而這又是建立在對作戰系統內部結構和活動規律認識的基礎上的.
1 作戰計劃生成綜觀
抽象地看,作戰計劃生成是將指導性的作戰目標映射到具體的兵力部署、資源分配、作戰行動等一系列計劃的過程,是一個復雜的精化過程,其中存在一個復雜的概念結構,并涉及大量的相關理論和技術.
1.1 相關重要概念及它們之間的關系
作戰計劃生成涉及的概念結構,定義了計劃生成過程中用到的概念要素以及它們之間的相互關系,為把握作戰計劃生成的復雜性提供了思維工具;同時,通過它們規定了計劃生成的任務、過程和方法等,為作戰計劃生成提供了基本遵循.
作戰計劃生成涉及的概念結構通常存在于一些軍事出版物和作戰條令中,例如美軍的《聯合出版物5–0:聯合作戰計劃》(Joint Publication 5–0:Joint Operation Planning)[5].其中,一些重要概念包括:目標狀態(End states)、目的(Objectives)、效果(Effects)、任務(Tasks)、使命任務(Mission)、行動過程(Course of Action,COA),等等,這些概念的含義如表1所示.
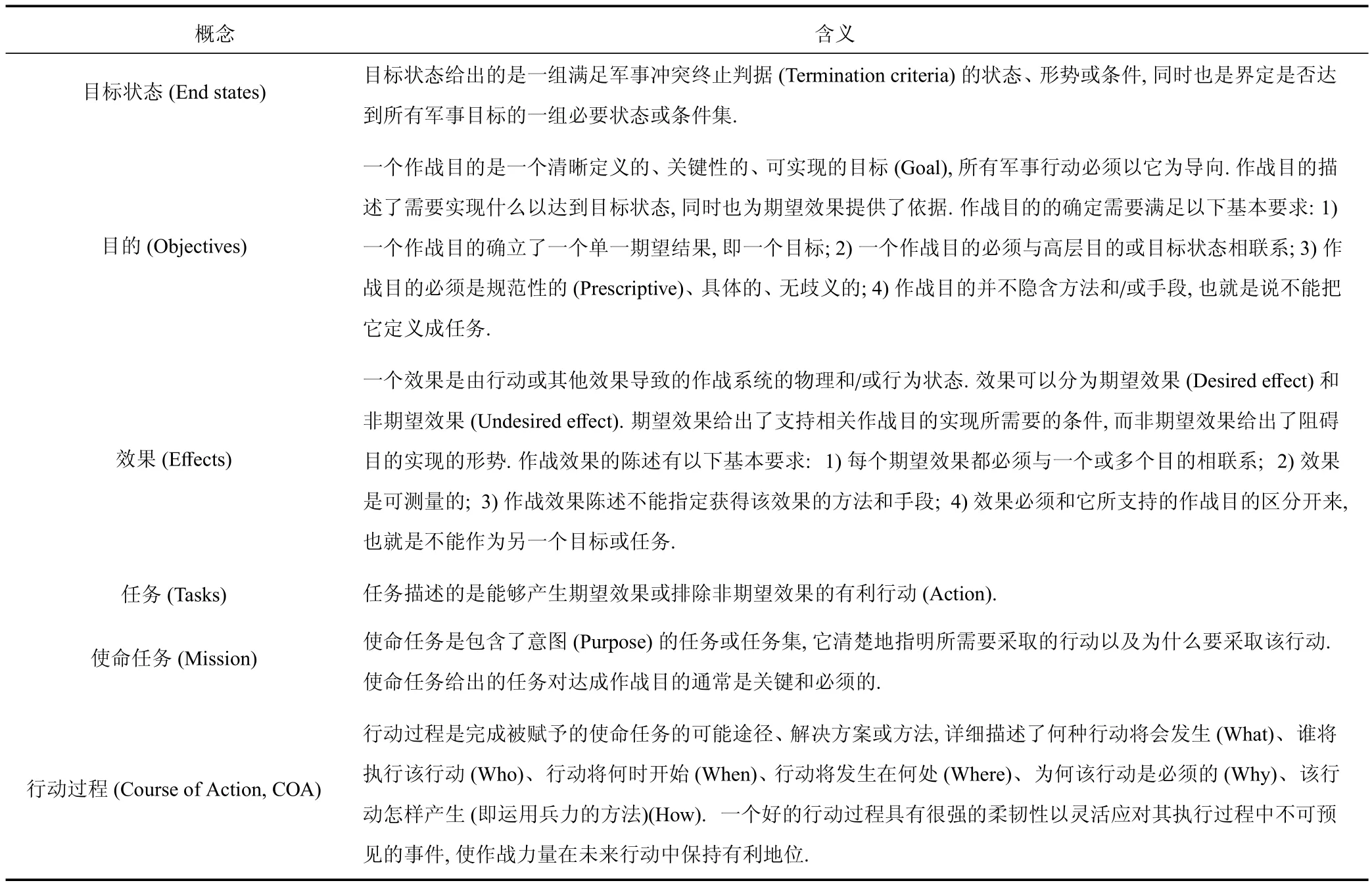
表1 作戰計劃生成涉及的一些重要概念的含義

圖1 概念內涵揭示的“界定”鏈和“支撐”鏈
從這些概念的含義看,目標狀態、目的、效果、任務和行動過程之間存在兩條因果鏈,一條“界定(Guide)”鏈,一條 “支撐(Support)”鏈,如圖1所示.同時,這些概念要素還存在于不同的指揮層次,也具有界定、支撐關系.圖2給出的是國家戰略、軍事戰略、戰役和戰術層次各概念要素之間的支撐關系.
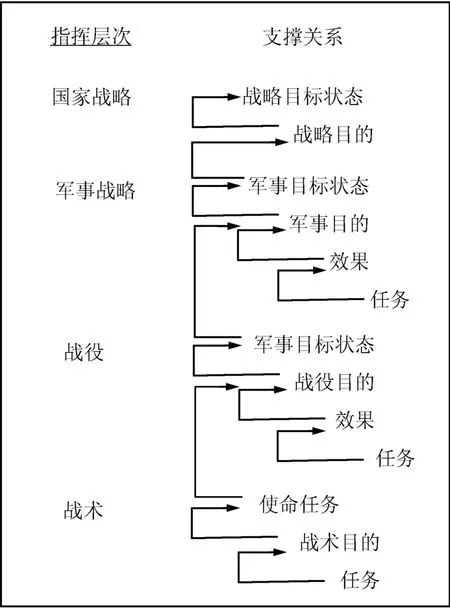
圖2 各指揮層次概念要素之間的支撐關系
1.2 相關過程及其涉及的知識
從作戰計劃生成的過程角度看,上述概念要素之間的界定、支撐關系,可以轉化為計劃生成要素之間的生成、評估關系,形成計劃生成過程中的生成鏈和評估鏈(如圖3所示),也就是說,概念要素之間的界定關系在計劃生成過程中是生成過程的指導,界定關系兩邊的元素在生成過程中分別是生成過程的“輸入”和“輸出”;要素之間的支撐關系在計劃生成過程中需要進行評估,評定它們之間的支撐程度,判斷支撐鏈最終能否引導戰略目標的實現.
圖3的生成鏈和評估鏈,實質上是將目標狀態到各種作戰計劃的因果鏈進行了分解,這一相互迭代的生成過程和評估過程在實際軍事實踐中非常復雜,需要一定的理論、技術和工具做支撐才能實現這一過程.圖4給出的是作戰計劃生成過程涉及的基本知識框架.

圖3 作戰計劃生成過程中的生成鏈和評估鏈

圖4 作戰計劃生成過程涉及的基本知識框架
其中,以態勢和可用資源為核心的事實約束,以及以目標狀態和作戰目的為中心的目的約束,是作戰計劃生成的初始條件,也構成了計劃生成和評估過程的事實和目的約束.另外,以作戰條令和戰略戰術為重心的規范約束,構成了計劃生成和評估過程的約束條件的第3級.
軍事規律在作戰計劃生成過程所涉及的知識中處于基礎和核心位置,它不僅是作戰條令和戰略戰術的基礎,也是作戰計劃生成和評估技術的基礎,只有建立在對軍事規律正確認知上的條令條例、戰略戰術、技術與工具,才能保證計劃生成與評估過程的正確性.特別地,作戰系統基本規律是客觀軍事規律的重要組成,是作戰計劃生成的基本遵循,是評估有效性的根本保證.
作戰計劃生成和評估的技術與工具,集中體現了對各種軍事規律的認知水平,同時也體現了理論與技術的發展水平.建立在相關理論與技術基礎上的自動化、智能化的技術和工具,是作戰計劃生成正確性和快捷性的保障.
綜上,作戰計劃生成過程涉及的知識,可以概括為“一大基礎、兩類技術、三種約束”.“一大基礎”即客觀軍事規律,“兩類技術”即計劃生成技術和計劃評估技術,“三種約束”即事實約束、目的約束和規范約束.相對來說,軍事實踐中的“三種約束”比較特殊一些,這里主要考察:作戰系統規律探尋中的理論與方法、作戰計劃生成的技術與方法、作戰計劃評估中的理論與技術.
2 作戰系統規律探尋的理論與方法問題
信息化條件下的作戰系統或作戰體系,包含了相互對抗的人員裝備、組織結構、指揮控制、行動過程等靜態與動態的要素和因素,其對抗的領域既包括陸、海、空、天、電等物理域,也包括鉸鏈作戰體系的信息域,還包括涉及文化心理的認知域和關系人際互動的社會域.所以,國內外的學者都一致認為現代作戰系統是一類復雜巨系統[1?4],其規律很難通過尋常的途徑來把握,對其規律探尋的方法也隨著理論與技術的發展而發展.
2.1 以模型為中心的理論與方法
以模型為中心的理論與方法,希望基于相似性原理建立起系統的結構、功能或行為模型,通過模型來探尋作戰系統的規律.由于基于的理論和關注的焦點不同,形成了各有側重而相互交織的建模方法,產生了不同形態的模型.
2.1.1 聚焦于解析的模型
以解析模型為中心的理論與方法,主要以傳統的運籌學、對策論等為代表,遵從傳統的科學范式,將作戰系統中的一些規律表達為數學解析模型.這些解析模型的建立通常以圖5的框架進行[6].
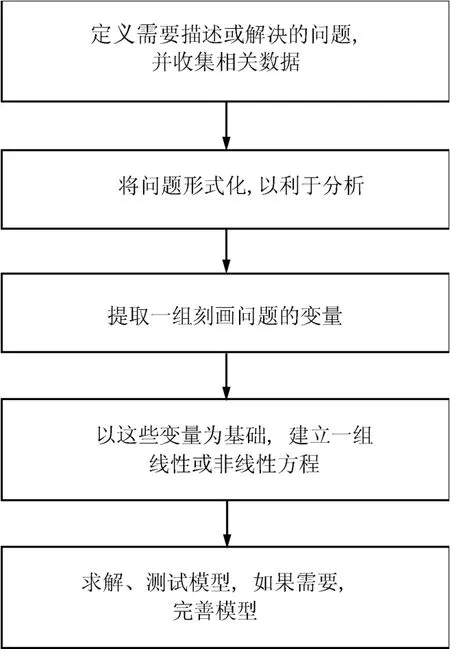
圖5 解析模型建立的框架
對于復雜的戰爭系統來說,一般只有極宏觀的問題或很微觀的問題,才能通過上述方法建立起有效的解析模型,比如戰略博弈規律的博弈論模型、戰損規律的蘭切斯特方程,等等,而對于一些更復雜的、需要聯系宏觀和微觀視角的問題,通常無能為力.但是解析模型以其嚴格的數學形式,常常成為其他建模方法想要達到的最終目標,并且即使不能建立起問題的最終解析模型,這些方法也常常是以一些解析模型為基礎來研究問題的.另外,解析模型也是系統多分辨率模型的重要組成.
2.1.2 聚焦于個體的模型
以個體模型為中心的理論與方法,主要以復雜適應系統理論(Complex Adaptive System,CAS)[7]和基于Agent建模與仿真的方法(Agent-based Modeling and Simulation,ABMS)[8]為代表.這一方法將作戰系統看成是由自主性、反應性、能動性和社會性的個體構成的系統,通過建立個體及個體間交互的模型來研究系統的規律,是一種自底向上的研究方法[9?10],其基本思想如圖6所示.
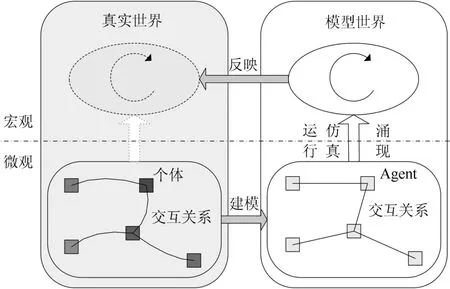
圖6 基于CAS和ABMS以個體模型為中心的理論與方法
以個體模型為中心的理論與方法最主要的特點是,通過對微觀層面的個體特征和行為建模來研究系統宏觀行為.基于CAS和ABMS,建立的個體模型是主動的、“活的”實體(Agent),更能相對準確地刻畫作戰系統的基本組成和系統演化的內部動因,更有效地反映了人們對作戰系統復雜性根源的認識,即在個體之間主動交往、相互作用的過程中形成和產生的;并且,這一方法通過主體和環境的相互作用,使個體的變化成為整個系統變化的基礎,把宏觀和微觀有機地聯系起來,統一地加以考察[9].
但是,這一方法對于作戰系統宏觀行為的刻畫通常是現象呈現,如果不做進一步的分析,對于其中規律性的東西也很難把握,因此,常常要與其他分析方法結合起來,例如數據耕種(或耕耘)(Data farming)[11?12]、大數據[13].
2.1.3 聚焦于聯系的模型
聚焦于聯系的模型關注的是作戰系統中的某些聯系,通過刻畫這些聯系完成相應問題的建模.通常,這些聯系都是以網絡來表達,并利用諸多現有的以網絡模型為中心的理論與方法來研究軍事系統.這些理論和方法包括:復雜網絡(Complex network)[14?16]、超網絡(Supernetworks)[17?19]、概率網絡(Probabilistic network),等等.
1)復雜網絡
復雜網絡研究以隨機圖、“小世界”網絡、“無標度”網絡、統計學、統計物理、系統動力學等為理論工具,研究現實世界中由相互聯系實體形成的網絡的統計特征、分布規律、動力學行為等宏觀特性,取得了豐富的成果[14?16].作戰系統(或體系)是由眾多實體組成的,但其整體的行為和效果往往決定于實體之間復雜的相互作用關系.將作戰系統看成是由復雜相互聯系的結點構成的系統,用復雜網絡描述這些結點和結點關系,就形成了作戰系統的復雜網絡模型[20].基于構建的作戰系統復雜網絡模型,利用復雜網絡研究中產生的理論與方法,可以分析[21?22]:a)作戰體系的主要特性、生成機制與節點互聯規律;b)指控網絡的拓撲特性與行為機理;c)指控、傳感、作戰、通信節點在體系網絡中的影響機制;d)作戰體系關鍵點、脆弱性以及級聯反應,等等.
復雜網絡既刻畫了系統中的個體,又刻畫了個體之間的復雜相互關系導致的系統整體涌現性的行為,非常適合于對一些復雜系統進行建模.但是一般復雜網絡的結點和邊都是同質的,而實際系統中多為綜合網絡,例如作戰系統包含了物理域的交戰網、信息域中的信息網、認知域中的指控網和社會域中的社會網等不同屬性的網絡,因而無法完全刻畫現實網絡特征[19].于是“超網絡”應運而興.
2)超網絡
“超網絡”就是用來指稱“高于而又超于現存網絡”,“高于而又超于”就是“網絡嵌套網絡”(networks of networks),且存在虛擬的節點、邊和流等的網絡[17].廣義上,超網絡可以看作一類復雜網絡,其研究的目的和內容也和復雜網絡研究類似,主要是進行網絡的統計學特性研究、魯棒性分析與度量,等等;同時,其研究方法也繼承了復雜網絡研究,不過為解決一般復雜網絡無法解決的問題,也發展了一些新方法,如變分不等式、超圖[19].
將超網絡應用于作戰系統研究,主要基于這樣的認識:超網絡的多層、多級、流量多維、多屬性或多準則等特性,與作戰系統中存在的網絡具有更大的相似性[23?25].因而,超網絡在近幾年的作戰系統研究中受到很大重視,例如,文獻[23]以超網絡、超圖理論為指導,建立了基于結構層和屬性層相統一的作戰體系超網絡模型;文獻[24]基于超圖建立了網絡中心化C4ISR系統結構的超網絡模型;文獻[25]則區分了物理域、信息域和認知域中不同作戰要素,建立了交戰網、信息網和指控網三層復雜網絡構成的體系作戰超網絡模型.
復雜網絡和超網絡關注的問題相對宏觀一些,所以模型相對“粗獷”一些,網絡結點之間聯系的隨機性常常局限于以下情況:a)定值;b)滿足一定的分布;c)遵循特定的規律,難以描述更“精細”的問題.
3)概率網絡
在軍事領域的應用中,概率網絡關注的問題相對更微觀,模型更“精細”,網絡結點之間的概率關系沒有太多限制.由于概率網絡理論和方法比復雜網絡和超網絡產生發展得要早,在作戰系統研究中很早就有應用,這些概率網絡包括:Petri網(Petri net)[26?29]、貝葉斯網(Bayesian net)[30?33]、影響網(Influenc net)[34?37]、影響圖(Influenc diagram)[38?40],等等.
Petri網是一種具有直觀的圖形表達和嚴密的數學基礎的建模工具,通常用于描述具有分布、并發、異步特征的離散事件動態系統[26?27],它以研究系統的組織結構和動態行為為目標,著眼于系統中可能發生的各種狀態變化以及變化之間的關系.作戰系統也有分布、并發、異步等特征,在需要描述系統的組織結構和動態行為、關注系統的狀態變化的研究中,Petri網是一個很好的建模工具,所以常常被引入這些研究[28?29].隨著研究的深入,Petri網發展出了許多不同形態的Petri網,用于刻畫系統的不同特征,如著色Petri網、時間Petri網、隨機Petri網、對象Petri網等,這也為作戰系統的建模與分析帶來便利.
貝葉斯網描述的是隨機變量之間的關系,它以網絡圖的形式直觀揭示問題的結構,又以概率論的原則對這一結構加以利用.構造貝葉斯網的主要目的是進行概率推理,它將復雜的聯合概率分布分解成一系列相對簡單的模塊,大大降低了知識獲取的難度和概率推理的復雜度[30].作戰系統中,許多因素或現象之間存在各種相關關系,特別是一些因果關系,例如作戰行動與作戰效果之間的因果關系,并且這些關系并不是確定的,存在一定的概然性,這些都與貝葉斯網天然契合.因此,許多研究就是以貝葉斯網為建模工具,對作戰系統加以分析[31?33].貝葉斯網具有很強的一般性,許多經典的概率模型和不確定推理模型都是它的特例,例如樸素貝葉斯模型、馬爾科夫鏈、隱馬爾科夫模型、卡爾曼濾波、粒子濾波等.因此,貝葉斯網為這些模型提供了一個共同的框架,使得在一個領域獲得的結果可以推廣到其他領域.充分發掘貝葉斯網的能力,對于作戰系統分析價值很大.
影響網和影響圖都是由貝葉斯網演化而來[34].影響網是貝葉斯網的特殊實例,其條件概率由影響約束來計算,它通過引入因果強度邏輯參數,提高了貝葉斯網的建模和推理能力.影響圖是貝葉斯網的擴展,通過引入決策結點和效用結點,提高貝葉斯網絡的輔助決策能力.對于軍事應用來說,影響網和影響圖能夠幫助捕捉系統或問題中的影響關系,形成有關影響問題諸要素的整體框架,因而應用也非常廣泛[35?37,39?40].影響網和影響圖也有許多變型或擴展,例如時間影響網、動態影響圖等,可以用于描述更復雜的問題.應用這些研究成果,有利于作戰問題的建模與分析.
需要指出的是,不同的概率網絡之間有著很強的聯系,在一定條件下,通過一定的手段可以相互轉化,例如文獻[41]給出了著色Petri網與一類時間影響網之間的等價關系,文獻[42]將時間影響網轉化成了時間片貝葉斯網.
2.1.4 問題討論
雖然上述各類模型的著力點不同,內在的理論與方法不同,應用的問題也有差別,但是它們并不是割裂、孤立的,在實際研究中可以將它們結合起來,例如文獻[43?44]就將基于Agent的方法與復雜網絡模型結合,用來研究作戰體系.另外,復雜網絡模型分析的結果也常常是以解析的方式表達出來;概率網絡可以作為智能化Agent的內部推理模型.因此,這些不同形態的模型之間是一種互補、增強的關系,可以用于描述作戰系統不同層級和不同方面的特性或問題.
2.2 以過程為中心的理論與方法
以過程為中心的理論和方法可以歸納為兩大類,一類是通過深入作戰系統具體而微的內部活動過程的細節認識系統,稱之為以系統過程為中心的理論與方法;另一類是通過規范、完善和優化觀察、實驗、數據收集和建模等過程,以過程的改善更好地認識和把握系統規律,稱之為以方法過程為中心的理論與方法.
2.2.1 以系統過程為中心
作戰系統的復雜性不僅因為其中的實體種類和數量眾多、實體之間的關系復雜,更因為處于這些錯綜關系中的實體之間的互動過程非常復雜,特別是包含了人的因素,系統從牛頓系統變成了默頓系統[45],其中的規律更難把握.因此,在面對一些問題時,具體而微地考察系統的內部活動過程非常必要.
OODA循環可以作為一個包含了人的系統過程的一般框架,但是也正因為太一般化,在實際研究中有時并不能提供更多的工作指導.指揮控制是作戰系統中涉及人的因素最多的過程,人們也提出了許多過程模型[46?47],如SHORE模型、Lawson模型、HEAT模型、能力層級模型、網絡中心戰指揮控制過程模型等,這些模型從不同的角度對指揮控制過程進行了宏觀描述,具有一定的啟發性.但是這些模型在一定意義上是規范的,即一般是用于指導指揮控制系統建設的,而不是實際的指揮控制過程.
英國人因集成防務技術中心(Human Factors Integration Defence Technology Centre,HFI DTC)以人類工程學理論為基礎,給出了分析指揮控制過程的EAST分析方法(Event Analysis of Systemic Teamwork,EAST)和WESTT工具(Workload,Error,Situational Awareness,Time and Teamwork,WESTT)[48?51].該方法整合了諸多人因方法,從多個角度描述和分析C4I活動,幫助認識有關這些復雜系統的Why、Who、When、Where、How、What等問題.但是,這一方法得到的結果更多的是描述性的,并且花費的時間也比較長.
以模型為基礎的系統仿真方法,可以對系統過程進行動態推演和分析,長期以來一直是作戰系統研究中最重要的方法[9?10].但是面對以人為主導的指揮控制過程問題,常常也束手無策.文獻[47]以聯合作戰指揮控制過程領域知識為基礎,應用模糊集和模糊推理方法,對指揮控制過程中涉及的不確定性信息進行了知識表示,以表達指揮控制過程中不確定性的一面.作戰系統仿真方法面對的問題一般是涉及過程的,但是方法本身還是以模型為主導的.
一般地,以系統過程為中心的方法也可以看作是一種特殊的以模型為中心的方法,只不過它們聚焦于系統過程,建立的是系統過程模型.
2.2.2 以方法過程為中心
在人類認識世界的方法中,實驗、觀察、數據收集、分析等過程發揮著重要的作用,方法過程科學與否有時決定著認知的成敗.
作戰實驗[52?55]以模擬仿真、對抗推演、綜合研討等手段,通過改進實驗過程、完善分析方法,以期獲得對作戰問題或作戰系統規律更可信的認識.不論作戰實驗是發現性的(Discovery experiment)、假設檢驗性的(Hypothesis testing experiment),還是演示驗證性的(Demonstration experiment)[52],實驗的目標設立、方法選取、想定設計、模型建立、實驗執行、數據收集、數據分析等過程,都需要進行科學設計.其中,探索性分析(Exploratory Analysis,EA)[56]得到了很多關注,可以作為一種有效方法應用到作戰實驗過程[57].
探索性分析方法是蘭德公司在戰略分析中總結得出的一種系統分析方法,雖然支撐它的是層次化分析建模、模型抽象與聚合、主動元模型、仿真結果數據可視化等關鍵技術[58],但是它的出發點和落腳點還是通過改善方法過程來獲得對系統全面整體的認識,使用了不同于其他方法的分析過程[59?60].探索性分析方法從系統所包含的不確定性因素出發,通過模型抽象和聚合,建立系統層次化變分辨率低分辨率動態模型,調整不同的不確定性因素,通過對結果數據進行可視化交互式分析來觀察和比較系統的行為變化,從而全面認識不確定性因素對結果的影響[58].
可以看出,以方法過程為中心的理論與方法,雖然強調了分析過程的重要性,并且通過過程引導來發展其支撐技術,以改進、完善分析方法,但是不可否認的是它們同樣需要關鍵技術(特別是模型)的支撐,如果脫離了關鍵支撐,過程也就只能是過程.所以,實際研究更關注支撐方法過程的關鍵技術,例如探索性分析中的元模型[61]、多分辨率模型[62],等等.
2.2.3 問題討論
以過程為中心的理論和方法與以模型為中心的理論和方法有著深層的聯系,以系統過程為中心的方法可以看作是一種特殊的、以系統過程模型為中心的方法,以方法過程為中心的理論與方法常常需要以模型技術為關鍵支撐.同時,也存在一些以過程為中心的理論與方法,既是以系統過程為中心又是以方法過程為中心,即在觀察、分析的客體對象上以系統過程為中心,在方法自身的特征上強調過程的重要性.
2.3 人工智能最新進展的啟示
上述探尋系統規律的理論和方法,基本都是基于研究者對系統的深刻理解上的,研究的結果都是人對系統認知的反映.然而,在把握系統性質方面,人工智能有關理論與技術給出了一種完全不同的方法,它們以機器學習為基礎,通過有監督或/和無監督的訓練,以類似于人的學習過程來把握系統知識.特別地,近幾年深度學習技術的深入發展,更是為這方面的研究帶來了生機.
今年3月,圍棋第一人李世石與AlphaGo之間的圍棋人機大戰,引發了學界對人工智能在軍事領域應用的深入探討.AlphaGo以深度神經網絡和蒙特卡羅樹搜索為基礎[63],通過減小搜索空間和提高搜索效率,來實現走子選擇.AlphaGo引人注目的一點是,算法中用于減小搜索深度的“價值網絡(Value networks)”和用于減小搜索寬度的“策略網絡(Policy networks)”,其參數值是通過與專業棋手對弈以及無數次的自我對弈學習得到的,而學習的結果就反映了它對棋盤位置價值和走子策略的認知.所以,AlphaGo對圍棋知識和贏棋規律的把握,不是邏輯,不是數學公式,也不是算法過程,而是深深隱藏在學習后的卷積神經網絡之中.并且,由于圍棋的復雜性,不僅考驗人的推理能力,也對人的直覺、大局觀等有很高的要求,因而隱藏于人工神經網絡的圍棋知識和贏棋規律并不普通,不能等閑視之.
因此,人工智能最新進展給我們的啟示是:建立探索作戰規律的人工神經網絡,通過模擬對抗和自我對抗,學習作戰規律,再將學習所得的、蘊含作戰規律的神經網絡應用于具體軍事問題.當然,作戰系統比圍棋復雜得多,不僅實體種類繁多,行動規則也多種多樣,并且與棋類博弈不同,它是不完全信息條件下的博弈.所以,從作戰問題的界定、表達,到神經網絡和學習算法的設計,都有很長的路要走.不過,AlphaGo團隊最近又將深度學習用于德州撲克[64],為處理不完全信息條件下的博弈問題帶來了希望.
總之,人工智能的軍事應用方興未艾,它不僅可以使軍事信息系統更加智能化,還有可能更深入地把握作戰規律,不過由于存在復雜性鴻溝,前景仍然不明.
3 作戰計劃生成的方法與技術問題
在實踐上,作戰計劃生成涉及兩個層面的問題:1)計劃內容的生成構建所涉及的方法和技術問題,包括計劃描述、任務規劃等;2)計劃生成的業務過程涉及的方法和技術問題,包括計劃工作任務的分解與協同等.
3.1 計劃內容的生成構建所涉及的方法和技術問題
根據第1節所述,作戰計劃生成過程通過圖3的界定/生成鏈,最終落實在作戰任務和行動過程上,所以作戰計劃的表達主要集中在任務與行動上.并且在實際作戰籌劃中,從戰略目標狀態到作戰目的,再到作戰效果的確定,更多地體現的是指揮員的戰略直覺和指揮藝術,雖然其反向的評估過程不乏方法和工具支撐.所以,作戰計劃的生成主要集中在作戰任務分配和行動過程規劃上.
3.1.1 作戰計劃描述
為了更好地支撐自動化、智能化的任務分配和行動規劃等工作,作戰計劃的形式化描述成為必需.
XML及XML Schema具有強大的表達能力,在實際工作中常常用于作戰計劃形式化描述,如文獻[65?66]所做的工作.但是,如果僅僅是XML,還缺乏一些必要的語義信息,即使XML Schema也僅僅能描述概念詞匯及數據類型信息,對作戰計劃領域知識無法很好地刻畫.其實,在XML成熟之前,就出現了一些計劃描述語言,如KQML(Knowledge Query and Manipulation Language)[67]、PDDL(Planning Do-main Definitio Language)[68]等,這些計劃描述語言都包含了領域知識,都是基于計劃領域本體的.
將本體(Ontology)概念引入作戰計劃領域,主要服務于4個目的[69]:知識獲取、用戶交流、形式化分析、系統操作,如圖7所示.具體包括領域建模、計劃描述、計劃生成、計劃分析、計劃分發與交互等.作戰計劃的本體建模及本體技術在作戰計劃中的應用問題,在文獻[70?71]中有較詳細的介紹.

圖7 計劃本體的主要目的
將本體應用于作戰計劃描述的好處是[70?74]:1)能夠表達豐富的語義問題,并且基于這種表達能夠對計劃中存在的一些約束問題進行自動校驗,從而提高計劃生成的效率;2)本體表示能夠對各種知識、信息模型進行共享和集成,形成統一的聯合作戰計劃表示基礎,從而提高指揮信息系統的互操作層次.
作戰計劃本體的建模研究,國外很早就已經展開(特別是DARPA支助的一些項目)[70],國內最近幾年也有一些研究[72?76].本體概念比較抽象,在實際作戰計劃形式化建模中可能無從著手,文獻[77]提出了一種層次化建模方法,即基于SysML(Systems Modeling Language)進行概念層建模,然后利用OWL DL根據概念模型構建本體,并進行概念模型驗證,最后基于C-BML進行邏輯層和物理層建模,生成計劃描述文檔.本體的層次化建模,有利于將作戰計劃的形式化描述落到實處,也契合于概念互操作層級模型[78].
實際工作中,本體描述語言的表達能力和有關工具,常常決定著本體的應用廣度和深度.隨著本體描述語言的發展,一些不確定或概率性知識也能夠進行表達[79],并且也應用到了作戰計劃描述中[80].但是,也要看到本體也存在著知識表達的邊界,不是所有知識都是能夠通過本體來表達并進行有效推理,例如前述AlphaGo所掌握的圍棋知識.
3.1.2 作戰任務及其分配
雖然在作戰計劃的生成過程中科學工具的使用日益增加,但不能否認指揮藝術在其中的作用,特別是從目標狀態、作戰目的到作戰效果這幾個階段.從某種意義上講,作戰效果成為作戰計劃生成鏈中的關鍵一環,它將計劃過程統一成一個邏輯一致的整體,并且支撐鏈也可以看成是效應鏈,即每一階段都需要確定它對上一階段的支撐效果,如圖8所示.所以,基于效果來進行籌劃和決策,已成為一種共識[81?82].由于計劃生成過程中的后半部分科學多于藝術,大部分定量的方法和技術都是圍繞這半部分而發展出來的.
從效果到任務,以及任務對效果的支持,是作戰任務分配要解決的問題.
作戰任務分配涉及的最主要的因素是打擊目標和火力,而首要問題是確定打擊目標.打擊目標應位于克勞塞維茨所說的戰爭“重心(Centre of Gravity,COG)”,文獻[32]給出了在作戰計劃過程中使用貝葉斯網來進行COG分析的方法,以支持嚴格的、系統化的COA分析.它利用貝葉斯網來描述COG的因果結構,這不僅使首長機關的思考過程更清晰,還能夠幫助記錄和增強這一思考過程,更重要的一點是能夠對COG的脆弱性等問題進行量化分析.
打擊目標分配和火力分配是任務分配中最常見也是最主要的兩種問題,許多研究就是圍繞著它們展開,例如文獻[37,83-88]所給出的這些研究.任務分配問題通常都可以轉化為一個以打擊效果為效用函數的優化問題.而打擊目標分配和火力分配的區別也主要在約束條件的不同,前者通常是打擊目標多于打擊平臺,后者則相反.
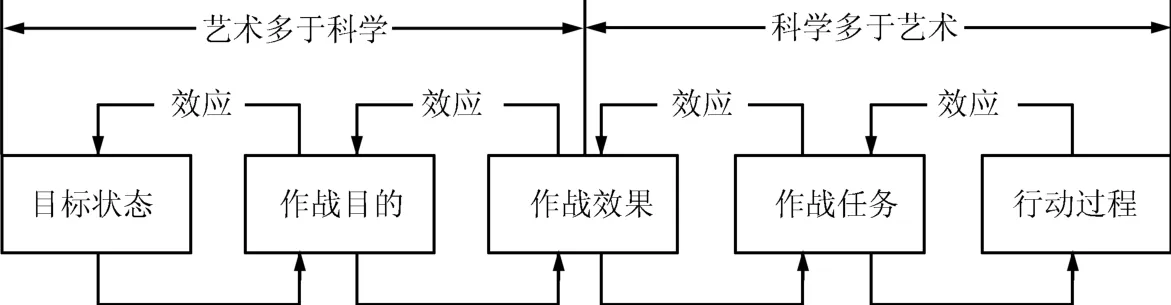
圖8 效果將計劃過程統一成一個邏輯一致的整體
所以,優化技術是作戰任務分配中最主要的技術.常見的運籌學優化技術,如線性規劃、非線性規劃、多目標優化等,在任務分配等軍事應用中非常廣泛,這些優化技術通常都是基于解析模型的.另外,借鑒自然和社會中的某些機制而產生的一些智能化優化算法,如遺傳算法、粒子群優化、蟻群優化、模擬退火算法、拍賣算法等,在任務分配中應用的也比較多[84?88].由于這些優化方法通常是基于算法過程的,可以看作是以系統過程模型為中心的方法.
通常,以打擊目標分配和/或火力分配為主的任務分配問題,一般不考慮時間協同和行動協同等約束,這主要是為了在能夠解決一些問題的條件下簡化計算模型.而要考慮這些約束,上述優化方法通常難以解決問題.鑒于聯合火力打擊方案與打擊效果之間存在復雜的因果影響關系,文獻[37]在聯合火力打擊方案優化研究中引入了隨機時間影響網絡,通過對聯合火力打擊使命目標達成效果產生的機理分析,建立起火力打擊任務到使命目標達成效果之間的隨機時間影響網絡模型,并基于隨機時間影響網絡構建支持聯合火力打擊方案評價的效用函數.
另外,作戰任務的確定也涉及標準化和程序化的流程,需要一些過程化的方法提供支撐.文獻[89]以組織行為來理解計劃問題,在界定相關概念的基礎上,提出了任務描述方法、使命分解原則與分解方法,以實現不同分解方法在結果上的同一性.
3.1.3 作戰行動規劃
作戰行動圍繞任務展開.作戰行動規劃基于作戰任務與行動過程之間的因果聯系,通過對作戰行動過程的安排,來遂行作戰任務,達到作戰效果,實現作戰目的.如第1節所述,作戰行動規劃需要回答What、Who、When、Where、Why、How等問題,即需要以任務為導向,賦予行動以行為主體、必需資源、時間分配和空間安排等.
行動規劃在傳統人工智能領域有非常豐富的研究[90],涉及經典的和非經典的規劃、啟發式和控制策略、時間與資源規劃、不確定性條件下的規劃等問題,使用的方法有狀態空間搜索(包括前向搜索、反向搜索、STRIPS算法等)、計劃空間搜索(Plan-Space Search)、規劃圖技術(Planning Graph Techniques)、命題滿足技術(Propositional Satisfiabil ity Techniques)、約束滿足技術(Constraint Satisfaction Techniques)、層次任務網絡(Hierarchical Task Network,HTN)、演繹規劃(Deductive Planning)、時間推理技術(Temporal Reasoning Techniques)、時間規劃(Temporal Planning)、基于馬爾科夫決策過程的規劃(Planning Decision Based on Markov Processes)、基于模型檢驗的規劃(Planning Based on Model Checking),等等.這些問題與作戰行動規劃有些類似,一些方法也在作戰計劃領域被繼承使用,特別是HTN技術.
HTN[91]通過任務分解和沖突消解來進行行動規劃.一個任務網絡是一個包含了執行順序約束的、需要完成的任務集,其中原子任務(Primitive tasks)即為可執行的行動,非原子任務(Non-Primitive tasks)需要經過層次化的任務分解得到可執行的行動.當一個任務網絡中只有原子任務,就是運籌學中的調度問題,通過HTN規劃就可以找到滿足約束的調度.較著名的應用HTN的自動規劃系統是SHOP和SHOP2[92?93],它們采用了有序任務分解(Ordered task decomposition)這一搜索控制策略,以減少推理的復雜性.SHOP和SHOP2應用到了很多領域,包括作戰計劃領域[93].國內也有研究將HTN應用到作戰計劃生成及一些決策問題,如文獻[94-96]給出的研究.當然,HTN的應用也存在一些挑戰,如復雜性問題[97]、時間推理的問題[98],等等.
HTN也可以看作是基于網絡模型的方法,另外兩種常用的應用于作戰行動規劃的網絡模型是Petri網和影響網,如文獻[36,99-101]給出的研究,其中特別一提的是澳大利亞的COAST(Course of Action Scheduling Tool)[100].鑒于Petri網能夠很好地刻畫COA涉及行動的條件和效果、任務執行的資源、任務行動的同步等問題,COAST以著色Petri網作為任務執行框架的形式化模型,并將Petri網工具嵌入到COAST中,以可執行的GUI方式提供給用戶,從而填平了形式化描述與系統實現之間的鴻溝,使Petri網在作戰行動規劃中成為真正可用的工具.
除了以上方法,過程推理、案例推理等人工智能中的推理技術,以及遺傳算法、蟻群優化、粒子群優化等智能化技術,也常常被應用于行動規劃,如文獻[102-106]給出的研究.
從行動規劃的內容來看,路徑規劃和時間協同是作戰計劃生成中經常需要面對的問題.路徑規劃技術已經非常成熟,許多領域都有路徑規劃問題(例如物流領域[107]),并且得到充分的研究,可以將這些成果應用到軍事領域.在一體化聯合作戰中,時間協同問題漸漸凸現出來,變得越來越重要,因而也越來越受到人們的重視,許多研究就是圍繞這一問題展開的[108?110].文獻[108?109]都引入了簡單時序網絡(Simple Temporal Network,STN)來描述任務中的時間約束問題,而文獻[110]則直接將時間作為作戰計劃線性規劃模型的約束,通過求解算法解決問題.
另外,由于“戰爭迷霧”的存在,一些文獻研究了不確定環境或對抗條件下的行動規劃問題,例如文獻[111-113]中的工作.對于不確定環境下的行動規劃,一種漸漸得到廣泛認同的觀點是:行動過程規劃需要從以最優化為目標向以魯棒性為目標轉變,盡量降低不確定事件對作戰行動過程方案的影響[112?113].影響網絡、作戰仿真等方法與技術常常被引入到這些研究中[113?117].從評估的角度看,魯棒性也可以作為作戰行動過程方案的評估指標.實際上較為理想的目標是,綜合考慮最優化和魯棒性,為最優化問題給出魯棒性解決方案.幸運的是這項研究在運籌學研究領域已經展開,如文獻[118]的工作.
3.1.4 計劃中的一致性問題
由于作戰計劃的制定過程中的業務分工以及問題本身的復雜性,常常會不可避免地產生這樣或那樣的沖突,導致作戰計劃中存在諸多不一致性.因而,沖突檢測與一致性驗證往往成為作戰計劃生成中必不可少的過程.
作戰計劃中的沖突主要出現在3個方面:資源分配、空間安排和時間協同.資源分配一般可以通過線性規劃、非線性規劃等手段以及黑板機制等分布協同機制來解決.而空間安排產生的沖突問題并不十分突出.作戰計劃中沖突最多也最棘手的還是時間協同,研究的最多的也是這類問題[119?124].
時間協同的沖突檢測與一致性驗證采用得最多的技術還是網絡模型,包括時序規劃網絡[119]、時序約束網絡[120]、簡單時序網絡[121]、點圖[122],等等.這些網絡模型主要用于刻畫各種時序約束關系,以利于描述和解決問題.其他一些方法包括沖突規則庫檢測[123]、模型檢驗(Model Checking)[124],等等.
鑒于作戰計劃本體化描述在語義表達上的優越性,基于語義推理的作戰計劃驗證[72?74,125],可以通過對各種需要驗證的問題進行建模和表達,利用語義推理工具,在軍事知識和作戰計劃本體的基礎上,進行推理驗證.相對于其他方法,基于語義推理的作戰計劃驗證方法可以對更多的一致性問題進行檢驗,其主要限制在本體描述語言的表達能力及推理工具的推理能力.
3.2 計劃生成的活動過程涉及的方法和技術問題
在現代信息化條件下,規范化的作戰任務規劃[126]業務模式成為作戰計劃生成的主流,并常常需要輔以軟件支撐,以便實現戰略意圖和首長決心向具體作戰計劃的順暢轉化.所以支撐作戰計劃生成活動首先遇到的是作戰計劃系統如何構建的問題.另一個非常重要的問題是計劃工作分配及過程協同問題,因為在軍事活動中,作戰計劃生成本身也是一個任務活動,并且涉及不同指揮層次和不同職能部門.
3.2.1 作戰計劃系統構建的方法與技術
現代軍事信息系統的構建,往往需要遵循一定的體系結構框架(Architecture Framework),作戰計劃系統也不例外.體系結構框架不僅能夠準確提煉信息系統建設需求,提供一種軍事人員和技術人員都能理解的、標準化的共同語言,架起不同領域、不同人員之間的溝通橋梁,便于提出滿足多領域、多層次不同類別用戶需要的綜合需求分析結果;還能夠指導系統設計,主要表現在[127]:1)能夠明確不同業務子系統在系統中的定位,明確各個系統承載業務及相互關系;2)能夠通過構建業務模型、明晰業務流程,準確揭示各種業務子系統之間的內在聯系;3)能夠強化信息資源規劃,明確系統之間信息交換的內容、表示方式、存儲格式和物理分布,保證信息資源的順暢流動和高放共享;4)能夠制定一定時期內兼容通用的技術體制解決方案,明確系統建設的強制標準,規定系統互操作的最小標準集合,從技術上保障異構系統之間的功能互操作.
而在諸多體系結構框架中,都融入了面向服務的方法與技術[128],包括北約的NAF v3.0、美國的DoDAF v2.0、英國的MODAF v1.2等.這既是技術發展的必然結果,也是網絡中心戰或網絡使能的必然需求.因此,基于面向服務的體系結構(Service-Oriented Architecture,SOA)構建作戰計劃系統,成為一些研究的工作基點,例如文獻[129-130]給出的工作.當然,由于技術路徑依賴等原因,實際工作中用得最多還是其他傳統的系統構建技術,如基于構件的技術[131].
前述計劃內容的生成構建所涉及的方法和技術,其實許多都是知識建模方法與技術,是對作戰計劃生成中涉及的知識進行建模,所以一些研究所聲稱的作戰計劃系統設計方法被冠以“知識”之名,如文獻[132].
3.2.2 計劃工作分配及過程協同技術
作戰計劃生成本身作為一個重要的軍事任務,涉及不同指揮層次和不同職能部門.作戰計劃業務工作需要在這些指揮層次和職能部門之間進行劃分和分配.實踐中,這種分配可以按照不同的業務劃分以一種相對固定的方式進行.而為保證作戰計劃的完整性和一致性,計劃過程中的協作問題凸現出來,過程協同技術成為這一方面的研究重點.
首先,一個非常重要的方面是要準確描述計劃過程中的協作過程,并且根據需要設計協作模型,以有效保證作戰計劃制定過程中的一致性要求.對協作過程進行形式化建模,不僅可以支持對過程的性能和行為分析以便于進一步改進,還可以用于指導支持這一過程的軟件系統設計.在對協作過程的形式化建模方法中,由于Petri網能夠描述事件間的順序和并發關系,并且能夠刻畫其中存在的沖突,很自然地它們成了許多研究的首選.文獻[133]利用Petri網描述了協作系統中為任務依賴設計的協作機制;文獻[134]則采用了著色Petri網來對作戰計劃過程進行建模;文獻[135]在分析協作沖突的基礎上,利用Petri網對計劃制定過程和多平臺計劃制定數據同步建立了分析模型.
其次,在作戰計劃系統中需要支持上述協作過程.其實隨著信息技術的發展,各個領域很早就有很多協作工具,技術也很成熟.軍事領域也早就有一些研究,例如文獻[136]早在2001年就給出了這方面的研究.
另外,隨著自動化和智能化技術發展,一些國家軍隊的作戰計劃系統中引入了自動規劃器,這就存在另一方面的協作問題,即做計劃的人與自動規劃器之間的協作問題.一方面人希望主導一些關鍵問題的決策,另一方面希望利用這些工具提高效率.文獻[137]給出了一個交互式混合規劃(Interactive Hybrid Planning)框架,用以接納、融合人的靈活性和自動規劃器的自動性.文獻[138]提出了“共生規劃(Symbiotic Planning)”概念,用以指導人與自動規劃器之間的協作設計,實現人與自動規劃器在認知層面的合作.
4 作戰計劃評估的理論與技術問題
正如第1節所述,作戰計劃評估就是要判斷任務分配和行動過程安排,是否可以完成賦予的任務,是否可以實現作戰效果,是否可以達成作戰目的,乃至是否可以導致目標狀態(態勢).作戰計劃評估可以作為一個獨立的過程存在,也可以包含在生成過程之中.并且作戰計劃生成所涉及的規劃和優化,本身就與評估不可分割.作戰計劃評估主要涉及兩個方面的理論與技術問題:1)評估指標構建及其所依據的理論;2)評估方法及其涉及的理論與技術問題.
4.1 評估指標構建及其所依據的理論
作戰計劃評估指標構建最直接的關聯因素是作戰任務、作戰效果、作戰目的和目標狀態的規定性,即作戰計劃希望支撐起的效應因果鏈,與此相聯系的指標可以稱之為功能性指標.另一類因素與作戰計劃的效率、適應性等相關,與此相聯系的指標可以稱之為性能性指標.作戰計劃評估指標的構建并不是毫無章法的,常常深深根植于一些軍事理論.
4.1.1 功能性指標
功能性指標的構建目前最通常的做法是基于作戰效果來進行,它背后的作戰理論是基于效果的作戰(Effects based operations)[139],因為作戰效果是行動過程和任務分配到作戰目的和目標狀態的中介,是圖1給出的支撐鏈的關鍵環節,也是最能被觀測和量化的因素.
按照網絡中心戰(Network centric warfare)理論[140],打贏現代戰爭的關鍵是獲取信息優勢,所以信息優勢在依據網絡中心戰構建的評估指標中應占有重要的位置,信息的豐裕度、信息的可獲取性、信息交互質量等成為其重要指標[141].按照美國CCRP(Command and Control Research Program)對信息時代戰爭的深入理解[130?141],作戰效果應該體現在物理域、信息域、認知域和社會域,作戰效果評估也可以從這幾個域來進行,相應的功能性指標也應能夠刻畫這些域的作戰效果.當然,不同域評估指標構建的難易程度不一樣,相對來說物理域評估指標相對直白一些,而認知域和社會域的則比較難以構建.
進一步,按照戰役和戰術理論[142?143],影響作戰的兩大類因素是:1)主觀因素,包括意圖、意志等;2)客觀因素,包括作戰力量、時間、空間等.在這些因素對作戰效果的影響清晰明了的情況下,也可以從這些方面建立起作戰計劃的評估指標,文獻[144]就是從時間、空間、戰斗力量3個方面,對作戰計劃中的關鍵環節建立起了評估指標.
4.1.2 性能性指標
性能性指標最常見的是優化或優選指標,這類指標的構建依據的是作戰計劃相關決策點的優化或優選準則,優化的內容包括力量使用、資源消耗、時間和空間安排等.另一類評估指標在第3節也提到過,即魯棒性.魯棒性指標的構建首先需要確定魯棒性度量方法,文獻[113]給出了這方面的一些相關研究工作.
文獻[145]在總結指揮與控制研究進展[146?148]的基礎上指出,指揮與控制“當前階段,其本質問題可歸納為如何將復雜系統所面臨的不確定性(Uncertainty)、多樣性(Diversity)和復雜性(Complexity),通過有效的指揮與控制,轉化為針對特定任務和使命的靈捷(Agility)、聚焦(Focus)、收斂(Convergence)等性能”[145].而文獻[149]也認為,“指揮是以發掘‘永恒有利’中的規劃為最終目的,也是其精華所在.而控制是以獲得‘變化優勢’為最終目的”.因此,作為指揮與控制核心要素的作戰計劃,也可以以靈捷、聚焦和收斂為評估指標.與魯棒性指標的構建一樣,以靈捷、聚焦和收斂為性能評估指標,關鍵是需要確定靈捷、聚焦和收斂的度量方法.這方面的研究主要以CCRP為代表,并且也主要集中在靈捷性方面.文獻[148]討論了靈捷性的定義、靈捷性的組成、靈捷性的概念模型、與靈捷性相關的假設、靈捷性的度量、靈捷性的實驗與分析等問題,這些研究工作可以作為后續工作的基礎,來構建作戰計劃的靈捷、聚焦、收斂等評估指標.
4.2 評估方法及其涉及的理論與技術問題
由于作戰系統的復雜性,實踐中的作戰計劃評估方法以推演評估和仿真評估為主,輔以其他評估模型與技術.
4.2.1 兵棋推演和作戰模擬
兵棋推演(Wargaming)是美軍的《聯合出版物5-0:聯合作戰計劃》[5]中明確規定的作戰計劃評估方法.它通過對作戰計劃的模擬執行,來研究作戰的動態演化過程,探討敵對行動以及不確定性和偶然性對作戰進程的影響,評估作戰計劃的可行性和有效性,發現計劃中的沖突和脆弱性,進而完善作戰計劃.兵棋推演可以有多種形式和方法,現代主要以作戰模擬為主要形式,以系統仿真為主要方法[150?154],特別是基于Agent的復雜系統仿真方法學,以及基于高層體系結構(High Level Architecture,HLA)標準的交互式仿真方法.這方面的書籍文獻比較多,不一一贅述.
4.2.2 其他評估模型與技術問題
除了模擬仿真,最常見的一類評估模型是基于概率網絡的,包括貝葉斯網、影響網、Petri網等(第2節中已經對概率網絡作了介紹,這里不再贅述),例如文獻[155-158]的研究.這些概率網絡模型刻畫了相關要素之間的關系以及對作戰效果的影響,可以看作是對作戰評估知識的建模.基于概率網絡的評估可以與計劃生成過程中規劃與優化相結合,形成一種生成與評估一體的過程.
另外,一些智能化技術也已被用于作戰計劃評估與優選,例如人工神經網絡[159?160]、粒子群優化[161],等等.通過建立人工神經網絡對作戰方案樣本進行學習,能夠得到作戰計劃的預測網絡,正如第2節所討論的,此時的評估知識隱含在學習后的神經網絡中,可以用于評估計劃的可行性和有效性.這里的關鍵是人工神經網絡的構建以及作戰方案訓練樣本的生成.通常情況下,神經網絡需要足夠的變量才能表征評估知識;而神經網絡的變量越多,需要的訓練樣本也越多.所以,對于復雜的作戰計劃這兩點都是有待深入研究的問題.
4.2.3 認知域與社會域的評估問題
由于牽涉到主觀因素,作戰計劃所能產生認知與社會效果往往很難評估.目前的研究主要基于復雜網絡模型,通過系統仿真和探索性分析來進行[9,162].同時,以人、社會、文化、行為(Human,Social,Culture,Behavior,HSCB)為對象的仿真建模方法和建模標準,也在積極發展與開發之中[163?165].文獻[163]討論了HSCB建模的方法論問題;文獻[164]報告了HSCB建模標準的建設情況;文獻[165]研究了如何構建HSCB本體,以支持HSCB仿真.
總的來說,作戰效果認知域與社會域的評估,通常在戰略、戰役層次進行,涉及諸多領域的知識,包括心理學、社會學、經濟學、人類學等,有待進行跨領域研究.
5 結論與展望
作戰系統(體系)的復雜性,決定了作戰計劃生成注定不是一個簡單的過程,其中涉及諸多理論與技術問題;并且因為作戰計劃在作戰行動中的特殊地位,使得對這些理論與技術問題研究的文獻浩如煙海.兼顧作戰計劃生成問題的廣度和深度,文章以一種綜合的視角考察了這些理論與技術.
首先,探討了作戰計劃生成過程涉及的相關概念結構,指出了其中存在的“界定”鏈和“支撐”鏈,并以此討論了作戰計劃生成過程涉及的基本知識框架,確立了其中的理論與技術問題的考察框架.然后,著重從3個方面的問題詳細回顧和討論了這些理論與技術:1)作戰系統規律探尋的理論與方法問題;2)作戰計劃生成的方法與技術問題;3)作戰計劃評估的理論與技術問題.這些回顧和討論在更深的層次上揭示這些理論與技術問題的內在關系,并為作戰計劃生成研究提供一個更廣闊的視野.
復雜性和智能化有著天然的聯系[166],文中探討的許多理論與技術問題也屬于智能化技術.人工智能的最新進展更是為作戰系統規律的探尋、作戰計劃的生成途徑和作戰計劃的評估方法帶了新的啟示,其軍事應用方興未艾,不僅可以使軍事信息系統更加智能化,還有可能更深入地把握作戰規律.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
