復雜涌流下水下自主航行器橫滾抑制控制仿真
2016-11-02 06:43:16王程成
智能計算機與應用 2016年3期
趙 威,王程成
(1中國人民解放軍91640部隊,廣東湛江 524064;2中國石油西氣東輸管道公司,太原 030000)
復雜涌流下水下自主航行器橫滾抑制控制仿真
趙 威1,王程成2
(1中國人民解放軍91640部隊,廣東湛江524064;2中國石油西氣東輸管道公司,太原030000)
在復雜的海洋涌流背景下,水下自主推進航行器受到擾動較大,出現橫滾導致控制穩定性下降,提出一種基于模糊PID擾動抑制的復雜涌流下水下自主航行器橫滾抑制算法。構建在復雜涌流下的水下自主航行器運動狀態模型,在航行器的縱向運動全包線內對橫舵角、橫滾角、回旋角等運動約束參量進行定常運動分析,采用模糊PID神經網絡控制模型進行控制律的改進設計,結合Lyapunov穩定性原理進行橫滾抑制和誤差修正,實現控制算法改進。仿真結果表明,采用該控制算法進行復雜涌流下水下自主航行器橫滾抑制控制,具有較好的輸出響應跟蹤性能,有效抑制橫滾,提高了水下自主航行器的穩定控制能力,魯棒性較好。
水下自主航行器;橫滾;控制;擾動;魯棒性
0 引 言
水下自主航行器(Underwater Autonomous Vehicle,UAV)通常所指的是魚雷、水聲誘餌、水下潛水艇等,水下自主航行器是利用無線電遙控設備和自備的程序控制裝置操縱的水下航行器,具有自備動力推進的功能。水下自主航行器按應用領域,可分為軍用與民用,軍用方面主要有魚雷和潛艇等,民用方面主要有水下探測搜救儀、水下捕撈裝置等。水下自主航行器由于其機動性好、隱蔽性強等特點,廣泛應用在水下目標攻擊、水下信息的監測探測、數據采集和情報搜集等方面,展示了較好的軍事和民用價值。水下自主航行器的穩定性航行控制是保證航行器自主推進的關鍵技術,在復雜的海水涌流環境下,水下航行器受到的擾動較大,容易產生航向偏移和橫滾,控制性能不好,研究水下航行器的優化控制技術具有重要意義。
傳統的水下航行器控制方法普遍采用支持向量機控制算法、PID神經網絡控制算法、時滯控制算法等[1-3],如美國的MK46魚雷,其自動駕駛儀采用的就是PID控制算法,法國的“海鱔”魚雷,采用的是時滯二自由度的控制算法進行駕駛儀控制系統設計。上述的控制系統和控制算法設計中,在航行器的縱向運動全包線內構建運動方程,通過非線性數學模型構建得到多個特定的航行狀態下控制參量進行最小二乘擬合處理,提高了水下航行器的姿態控制的穩定性[4],但上述控制方法采用插值或者擬合策略,使控制器參數在有限個線性模型之間連續變化,導致姿態角誤差跟蹤過程中容易出現失真。文獻[5]采用H∞魯棒控制方法進行了水下自主航行器的橫滾控制器的設計,能夠基本滿足姿態控制的要求,但是該控制系統沒有進行擾動抑制,魯棒控制沒有學習的能力,在設計時要求知道不確定的上界值,導致自適應性能不好。
針對上述問題,本文提出一種基于模糊PID擾動抑制的復雜涌流下水下自主航行器橫滾抑制算法,構建在復雜涌流下的水下自主航行器運動狀態模型,在航行器的縱向運動全包線內對橫舵角、橫滾角、回旋角等運動約束參量進行定常運動分析,采用模糊PID神經網絡控制模型進行控制律的改進設計,結合Lyapunov穩定性原理進行橫滾抑制和誤差修正,實現控制算法改進。最后通過仿真實驗進行了性能測試,展示了本文控制算法的優越性能。
1 復雜涌流下水下航行器的運動數學模型構建和控制約束參量分析
1.1復雜涌流下水下航行器的運動數學模型構建
為了實現對復雜的海洋涌流背景下水下自主推進航行器的有效控制,抑制橫滾和航向誤差,需要首先構建復雜涌流下水下航行器的運動數學模型構建,通過橫滾抑制控制,進行橫滾和俯仰角度跟蹤誤差擬合,提高水下航行器的航行穩定性,在建立復雜涌流下水下航行器運動模型之前,先做如下幾點基本假設:
1)水下航行器為剛體,其外形關于縱平面x1Oy1平面對稱;
2)水下航行器在海水背景下航行受到的涌流的流體動力位置力及海洋環境變化的阻尼力滿足線性假設;
3)忽略因聲學環境和海浪的線性干擾導致的誤差;
4)近似認為地面坐標系為慣性坐標系[6-10]。
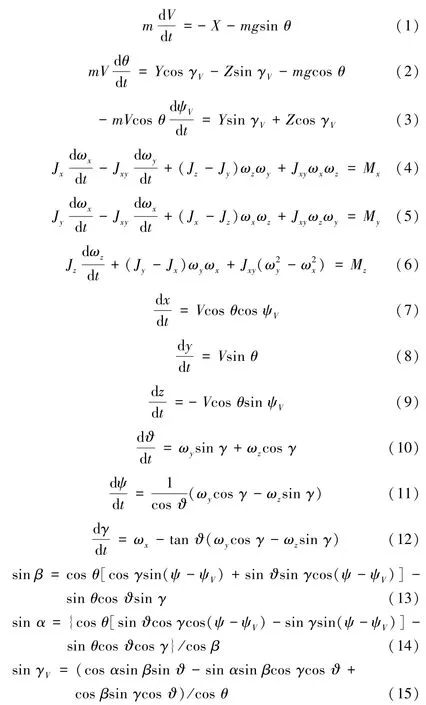
根據上述假設,構建水下航行器的運動數學模型,水下航行器的運動數學模型包括了質心動力學方程和穩態方程,根據動量矩和動量矩定理,可以得到水下航行器在縱向運動矢量空間內的運動方程組如式(1)-(15)所示。

1.2控制約束參量和控制目標函數構建


水下航行器經歷過的橫滾位置記為Pi=(pi1,pi2,…,piD),當被控對象隨著概率隨機初始化作用,自適應慣性權受到姿態參量樣本的約束,且系統達到平衡時,得到最小信息熵函數控制下的涌流背景下的水下航行器慣性權重能夠收斂到最優解,以·x(t)=Ax(t)+Bu(t)和uc(t)= Kxc(t)的形式給出水下航行器航行的穩定性控制結構模型,從而得到航行控制的閉環系統為:

假設在未知的不確定擾動下,運動參數為常數,此時水下航行器做等速水平直線運動的慣性權重ω按照下式取值:

其中,ωmax和ωmin分別是慣性權重上下限,采用最小信息熵進行泛函加權,對被控對象進行模式識別和穩定性自適應修正。此時,給定線性化小擾動特性函數Gm(s),從輸出端引出反饋向量函數,繞開了時滯環節e-tms的影響,得到涌流背景下的水下航行器橫滾抑制控制狀態函數為:

通過上述系統函數,采用自適應算法在線調整權值,基于LM-Smith神經網絡泛函特征方程,對航行控制的位置偏移進行完全跟蹤補償,得到:

根據上述分析得知控制系統收斂,表示在涌流背景下的水下航行器姿態穩定特性指標函數為:

其中,e是平均絕對誤差性能函數均方誤差,ek是縱向運動線性狀態的第k個分量。經由如上分析,構建了被控對象模型和控制目標函數,以此為基礎進行水下自主航行器的橫滾抑制控制優化設計。
2 控制算法改進及穩定性證明
在復雜的海洋涌流背景下,水下自主推進航行器受到擾動較大,出現橫滾,傳統的控制算法在縱向運動控制中橫舵角產生非線性誤差,控制精度不好,為了克服傳統方法的弊端,本文提出一種基于模糊PID擾動抑制的復雜涌流下水下自主航行器橫滾抑制算法,在航行器的縱向運動全包線內對橫舵角、橫滾角、回旋角等運動約束參量進行定常運動分析,采用模糊PID神經網絡控制模型進行控制律的改進設計,結合Lyapunov穩定性原理進行橫滾抑制和誤差修正,改進算法的設計過程描述如下:將水下自主航行器在涌流背景下的水下航行姿態角控制的非線性系統進行分解,定義Lyapunov函數為:

則對Lyapunove函數求導,得到:
根據上述分析可見,水下自主航行器在涌流背景下的水下航行控制的基準運動為一個定常運動,Lyapunov函數求導小于零,表示姿態控制系統是穩定而且有上界的,結合基準運動方程,求解縱向運動參數,得到:

通過對系統某些參數的測量,在水平等速直線運動狀態下,得到水下自主航行器在涌流背景下的水下航行姿態角控制的等效控制律為:

通過上述分析,得到定常運動下的水下航行器變結構控制律演變為:

由此實現對水下自主航行器在涌流背景下的水下航行橫滾的抑制控制設計和改進。進一步,進行穩定性證明。
證 明 假設水下航行器的縱向運動參數為一個非線性的向量函數,采用自適應算法在線調整權值,取:

在縱向定常運動下,航行器做等速回旋運動的穩定性Lyapunov函數為:其中,給出如下式所示的模型:


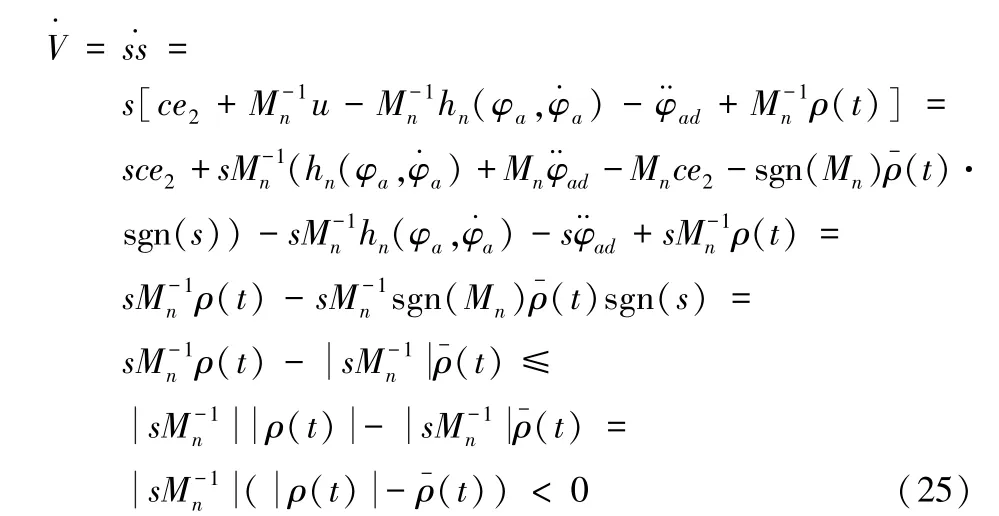
對應的上界估計值滿足Lyapunov穩定性原理,采用本文設計的模糊PID擾動抑制控制器可以保證控制系統的漸近穩定。根據Lyapunov穩定性原理,得到控制器的Lyapunov函數的求導過程為:
可見,上式小于零,因此,本文設計的控制算法是漸進穩定的,航向偏移誤差收斂到零,控制魯棒性較好。
命題得證。
3 仿真分析
為了測試本文設計的控制算法在抑制水下自主航行器的橫滾和航向誤差修正方面的應用性能,進行仿真測試實驗分析,實驗中,選擇了ADI公司的ADSP-BF537作為數字處理芯片,進行在涌流背景下的水下航行控制系統的數字信號處理,首先進行運動姿態數據采集,對各個通道數據進行8通道均勻線列陣A/D采樣,以減少擾動對穩定性控制的干擾,得到水下自主航行器在涌流背景下的水下航行的縱向通道的誤差模型為:

根據上述模型,進行控制輸出的姿態角仿真測試,在相同實驗參數下,采用本文方法和傳統方法,進行水下自主航行器的橫滾抑制仿真,以控制輸出的姿態角誤差u為測試指標,得到仿真結果如圖1所示。
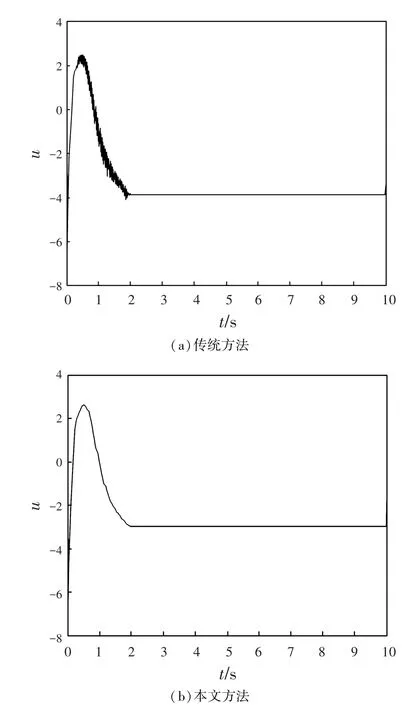
圖1 水下航行器的控制輸出的姿態角誤差對比Fig.1 Comparison of attitude angle error of control output of underwater vehicle
從圖中可以看出,采用本文方法進行水下航行器的控制,能有效抑制了橫滾誤差,進行復雜涌流下水下自主航行器橫滾抑制控制,輸出的姿態角誤差收斂到零,具有較好的輸出響應跟蹤性能,提高了水下自主航行器的穩定控制能力,魯棒性較好。
4 結束語
水下自主航行器的穩定性航行控制是保證航行器自主推進的關鍵技術,在復雜的海水涌流環境下,水下航行器受到的擾動較大,容易產生航向偏移和橫滾,控制性能不好,研究水下航行器的優化控制技術具有重要意義。本文提出一種基于模糊PID擾動抑制的復雜涌流下水下自主航行器橫滾抑制算法,構建在復雜涌流下的水下自主航行器運動狀態模型,采用模糊PID神經網絡控制模型進行控制律的改進設計,結合Lyapunov穩定性原理進行橫滾抑制和誤差修正,實現控制算法改進。研究得出,采用該控制算法進行復雜涌流下水下自主航行器橫滾抑制控制,具有較好的輸出響應跟蹤性能,有效抑制橫滾,提高了水下自主航行器的穩定控制能力,性能優越于傳統方法,展示了較高的應用價值。
[1]陸興華,吳恩燊,黃冠華.基于Android的智能家居控制系統軟件設計研究[J].物聯網技術,2015,35(5):692-695.
[2]MAHMOUDEE.Complexcompletesynchronizationoftwo nonidenticalhyperchaoticcomplexnonlinearsystems[J]. Mathematical Methods in the Applied Sciences,2014,37(3):321-328.
[3]PALOMARES I,MARTINEZ L,HERRERA F.A consensus model to detect and manage non-cooperative behaviors in large scale group decision making[J].IEEE Trans on Fuzzy System,2014,22(3):516-530.
[4]ZHANG H,WANG Z,LIU D A.Comprehensive review of stability analysis of continuous-time recurrent neural networks[J].IEEE Trans on Neural Networks and Learning Systems,2014,25(7):1229-1262.
[5]葛立志.基于全彈道控制分析的水下航行器攻擊模型視景仿真[J].艦船電子工程,2015,35(3):137-141.
[6]陸興華,陳平華.基于定量遞歸聯合熵特征重構的緩沖區流量預測算法[J].計算機科學,2015,42(4):68-71.
[7]周勇,甘新年,胡光波,等.魚雷制導控制系統多通道控制加權算法設計[J].現代電子技術,2014,37(19):14-17.
[8]趙威.強海水混響背景下水中兵器攻擊目標檢測研究[J].智能計算機與應用,2016,6(2):51-54.
[9]趙石磊,郭紅,劉宇鵬.基于軌跡跟蹤的線性時滯系統容錯控制[J].信息與控制,2015,44(4):469-473.
[10]明平松,劉建昌.隨機多智能體系統穩定性綜述[J].控制與決策,2016,31(3):385-393.
Simulation of roll inhibition control of underwater autonomous vehicle in complex surge
ZHAO Wei1,WANG Chengcheng2
(1 No.91640 Troops of PLA,Zhanjiang Guangdong 524064,China;2 China Petroleum West East Gas Pipeline Company,Taiyuan 030000,China)
Under the complex background of ocean current,water self propulsion vehicle subject to greater disturbance,roll leading to decline in the stability control,based on Fuzzy PID to suppress the disturbance underwater autonomous vehicle roll suppression algorithm of the complex sympathetic inrush is proposed.Underwater independent vehicle motion model of complex surge flow is constructed,in the vehicle longitudinal motion envelope on the horizontal rudder angle,roll angle and swing angle motion constraint parameters were constant motion analysis,adopted fuzzy PID neural network control model to the improved design of the control law,roll suppression and error correction according to the Lyapunov stability theory,to realize the control algorithm improvement.Simulation results show that using this control algorithm complex freshness of underwater autonomous navigation transversely rolling inhibitory control,has good output tracking performance,effectively inhibit the roll,improve the ability to sail of the underwater autonomous navigation,and it has a better robustness.
underwater autonomous vehicle;roll;control;disturbance;robustness
TP276
A
2095-2163(2016)03-0011-04
2016-05-04
趙 威(1979-),男,學士,高級工程師,主要研究方向:水中兵器工程及技術保障;王程成(1987-),男,學士,助理工程師,主要研究方向:電氣工程與自動化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
光學精密工程(2016年6期)2016-11-07 09:07:19