航空航天新型電機發展及應用分析
2016-11-03 11:29:46金雯,王卿,周楊,曹寬
導航與控制 2016年5期
金 雯,王 卿,周 楊,曹 寬
(1.中國航天科技集團第十六研究所,西安710100;2.西北工業大學自動化學院,西安710129)
航空航天新型電機發展及應用分析
金雯1,王卿1,周楊2,曹寬1
(1.中國航天科技集團第十六研究所,西安710100;2.西北工業大學自動化學院,西安710129)
近幾年隨著航空航天領域的不斷發展,對航空航天用電機的要求也在不斷提高,隨之便產生了一批新型電機。其中,比較具有代表性的有超聲波電機、磁懸浮電機、開關磁阻電機,分別對這三種電機進行了概念以及原理的表述。接下來分析了這三種電機的優缺點以及其分類方式,并評價了其研究現狀以及應用領域。最后著重總結了這三種新型電機在航空航天領域的應用,并對其發展進行展望。
航空航天;超聲波電機;磁懸浮電機;開關磁阻電機
0 引言
隨著先進的控制理論不斷深入和優化,智能功率驅動技術、集成電路技術、傳感器技術和集成電機技術等相關技術的突破與發展,高性能的伺服控制系統成為了現實。電機作為伺服系統的執行機構,相關技術的發展更是日新月異。傳統的電磁電機在一些場合已無法適應“更快、更機動、更高、更準”的要求,而超聲波電機、磁懸浮電機等新型電機恰好彌補了傳統電磁電機的缺陷。新型電機與傳統的電磁電機相比具有結構簡單而且緊湊、大扭矩、響應快、可實現高精度的控制、不受電磁場影響、斷電自鎖力矩大等特點。可以預見,新型電機在未來某些領域內必將替代傳統電磁式電機,成為發展主流。
1 超聲波電機
1.1概念及原理
施加在異極晶體上的應力會在晶體中誘發出電場,這一現象稱為正壓電效應;反之,若在異極晶體上施加電場,該晶體會出現應變或應力,這一現象稱為逆壓電效應。壓電效應是這二者的總稱。
超聲波電動機(Ultrasonic Motor,USM)是一種新型的運動執行機構,從運動原理上講,它利用了壓電陶瓷的逆壓電效應,激發定子彈性體在超聲頻域內產生振動而工作。從運動本質上講,超聲波電機的定子高頻振動才是其動力來源,而非傳統電磁式電機定轉子磁場相互作用,產生電磁轉矩帶動電機轉子轉動[1]。由于其定子高頻振動的頻率通常在18KHz以上的超聲頻段,超聲波電機得名于此。
超聲波電機的定轉子直接接觸憑借相互之間的摩擦力驅動。一般來說,將交變的電壓施加在定子上的壓電陶瓷元件上,激發定子彈性體的機械振動,該振動通過定子和轉子的接觸摩擦耦合,帶動轉子定向運動。
1.2主要優缺點
超聲波電機憑借自身功率密度大、低速大轉矩、無電磁干擾、無輸入自鎖等優良特性在航空航天領域、精密控制領域、非連續運動領域等高精尖領域內均有運用,而且在某些極端環境中,超聲波電機所表現出的優良特性是傳統電磁式電機無法匹敵的。從發展趨勢上來看,超聲波電機在各種高精尖領域內的應用前景光明,在未來很有發展潛力。超聲波電機突出的優點是:
(1)低轉速,大轉矩
超聲波電機定子彈性體與轉子之間通過摩擦耦合傳遞完成能量傳遞,這一點決定了超聲波電機是一種低轉速的電機[3],電機實際運行時的轉矩密度一般是電磁電機的8倍以上,如表1所示[4]。所以超聲波電機可以直接帶負載而無需配套的減速裝置,從整個伺服系統層面上來看,減少體積質量,提高可靠性,提高系統的動態特性和穩態特性[2]。
(2)無電磁噪聲,電磁兼容性好
從超聲波電機工作原理可以得知,電機定轉子之間通過接觸摩擦力耦合傳遞能量,電機工作時不會向外界產生電磁干擾,同時也不會受到外界電磁波的干擾[1],特別適用于電磁兼容性要求嚴苛的環境中,如航空航天用精密儀器中、光學系統中等。
(3)無源自鎖性,響應時間短
傳統電磁式電機如無刷直流電機(BLDCM)斷電后,定子繞組中沒有電流,從而無法產生定位轉矩,用在伺服系統中時,需要額外添加轉子定位設備,使系統體積增大,可靠性降低。
而超聲波電機斷電后,由于定轉子之間直接接觸,有靜摩擦力存在,電機便具有了較大的保持力矩,可以不添加任何額外裝置實現自鎖功能,大大簡化了定位控制[1]。
除此之外,與傳統電磁式電機相比,超聲波電機空載轉速低,轉子慣量小,動態響應時間僅為1ms甚至更少。例如Cranfield的模型超聲波電機靜止到全速僅需0.5ms,并且能在0.1ms內停止[2]。優越的動態響應特性使得在一些閉環位置伺服控制中,超聲波電機可以實現幾個納米的分辨率。
(4)耐低溫和耐真空,適合太空環境
超聲波電機本身所帶的壓電陶瓷以及其驅動控制裝置的耐低溫、真空的特性,可以將其應用在宇航機械系統和控制系統的驅動裝置[1]。在航空航天領域極端惡劣的條件下,超聲波電機的性能優勢更加凸顯。
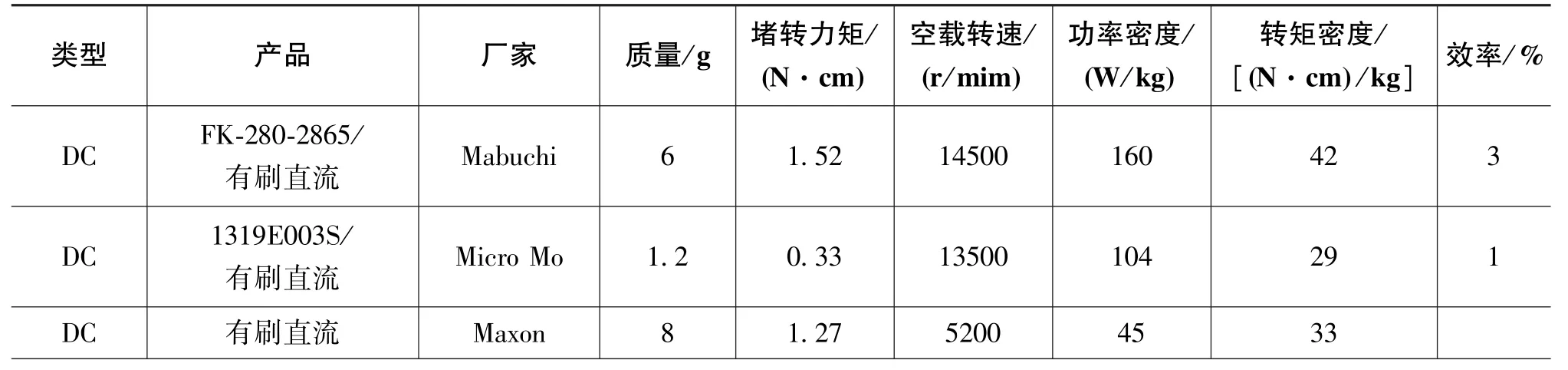
表1 超聲波電機與直流電磁式電機性能對比Table 1 Performance comparison between ultrasonic motor and DC motor
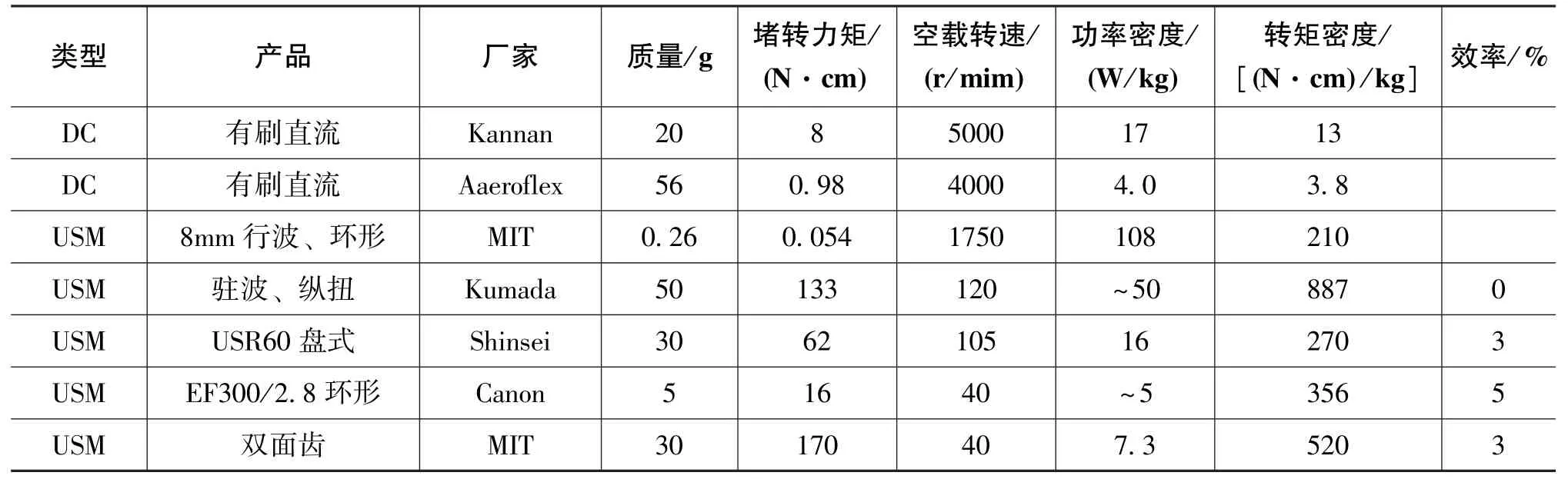
續表
但同時超聲波電機也具有一定的局限性,相較于傳統的電磁電機,超聲波電機的主要缺點是:
(1)輸出功率小、轉換效率低
由于超聲波電機運轉時,存在兩種形式的能量轉換,一是壓電陶瓷將外界施加的交變電壓利用逆壓電效應轉化成為機械振動;另一種是定轉子通過摩擦耦合將振動轉化成轉子的軸向輸出[1]。兩次能量轉換的過程中損耗都比較大,造成電機整體效率低。同時由于工藝等各項技術的原因,超聲波電機目前的功率級別在1kW左右,在很多大功率場合不適用。
(2)定轉子界面磨損嚴重,振動導致疲勞損壞
由于正常工作時,定子的超聲振動頻率很高,一是會給粘接在定子表面的壓電陶瓷帶來振動沖擊,有可能導致其脫落甚至斷裂;二是長時間工作會給電機整體帶來疲勞損耗。綜合上述因素,超聲波電機的壽命通常較短。
(3)需要專用高頻電源
由于超聲波電機工作在超聲頻域范圍內,必須用專用的高頻激勵電源供給壓電材料,使其能夠激發出晶體的超聲振動并且提高轉換效率。通常這種高頻電源造價很貴很難取得,而不像傳統電磁式電機采用直流電或者工頻交流電,極易獲得。
1.3超聲波電機的分類
從20世紀80年代中期開始,陸續出現了多種原理、形式的超聲波電機,但是其分類標準不明。通過閱讀文獻,總結出前人大體上根據壓電激勵模式、結構形式、功能及應用場合等將超聲波電機分為不同種類[3-5]。
如果根據電機的驅動形式來分類,超聲波電機可以分為行波型、駐波型和電致伸縮公轉子型[1]。行波型電機根據其振動模式不同可以分為同型簡并模式和單一振動模式;駐波型電機根據其振動模式不同可以分為異型簡并模式、單一振動模式和多模態振動方式。
如果根據機械振動獲取方式不同來分類,超聲波電機可以分為非諧振驅動和諧振驅動兩種類型[1]。其中,非諧振驅動超聲波電機可以分為蠕動電機和慣量電機;諧振驅動超聲波電機可以分為模態轉換電機和混合換能電機。
目前,最具代表性的一種超聲波電機是旋轉型行波超聲波電機[6]。其顯著特點是低轉速、大力矩、可用于直接驅動、結構簡單、電磁兼容性好并具有斷電自鎖等功能[7],特別適用于小(微)型化及精密裝置的驅動和控制,尤其是在航天、醫療、微機電系統(MEMS)等一些對磁場敏感或有高定位精度要求的領域中具有廣闊的應用前景[8]。
1.4超聲波電機的應用領域
超聲波電機在光學領域、航空航天領域、精密位置伺服領域、醫學領域、汽車領域內的特定場合下均有不俗的表現,尤其是在光學領域的相機調焦方向和航空航天領域太空機器人方向[1]已經有較為成熟的應用案例。也正是由于超聲波電機在這些領域的應用,使得人們看到了它的發展潛力。下面列舉超聲波電機在光學領域和醫學領域內的應用:
(1)相機調焦
20世紀80年代初,日本佳能公司就開始致力于研究超聲波電機在照相機鏡頭調焦中的應用。1987年,佳能公司成功將超聲波電機應用到EOS系列照相機配用的鏡頭上[9]。20世紀90年代中期,尼康公司也成功將超聲波電機應用在照相機鏡頭調焦上。西格瑪公司將USM應用在大口徑望遠鏡上[1]。
(2)核磁共振裝置
由于核磁共振裝置在實際應用中,線圈周圍存在2T或者更高的強磁場,大多數普通電磁式電機無法在如此強的磁場中正常運轉,而且電磁式電機在運轉過程中會發出電磁波干擾核磁共振裝備的正常工作[1]。這種強磁場的環境恰好適合不產生磁場也不受磁場干擾的超聲波電機工作。西門子醫療器械公司把3個USM利用在核磁共振裝置上,收效很好[1]。
1.5超聲波電機在航空航天領域內的應用
NASA屬下的噴氣推進實驗室(Jet Propulsion Laboratory,JPL)開發了直徑分別為1.1英寸、2.5英寸和2.8英寸的環形行波型超聲波電機,用于太空行走微型機器人的微型儀器機械臂(Mirco Instrument Arm,MIA)和微型桅桿式機械臂(Mirco Mast Arm,MMA)(用于全景觀察和自我矯正)等[10-11]。
美國和法國利用超聲波電機響應速度快等特點,成功地將超聲波電機應用于導彈的測控系統中,而美國的導彈上(導引頭和舵機驅動)也采用了超聲波電機[12]。
NASA屬下的噴氣推進實驗室和麻省理工學院聯合研制了特種超聲波電機,并成功將其應用于火星探測器的微著陸器,如圖1所示。該特種超聲波電機正常工作時的峰值輸出轉矩達到2.78N·m,可以在最低溫度達-100℃甚至更低的環境中使用,并且比用傳統電磁式電機減輕總體質量達30%以上[13]。
圖1 USM應用于火星探測微著落器Fig.1 The application of ultrasonic motor in micro Mars lander
超聲波電機的相關研究工作在國內雖然起步較晚,但是近年來以南京航空航天大學為代表的各大科研機構積極開展相關研究。
其中,南航電氣工程學院研制的超聲波電機已經成功應用于嫦娥三號探測器的紅外光譜儀上,如圖2所示。這臺電機只有46g,代號為TRUM-30A。在實驗室中這臺電機在-120℃~180℃的真空工況下工作正常,電機性能良好[14]。目前,南航也正在積極為嫦娥五號探測器研究配套的超聲波電機,以求在未來實現利用超聲波電機完成精密位置伺服控制,提高探月探測器紅外光譜儀的可靠性。
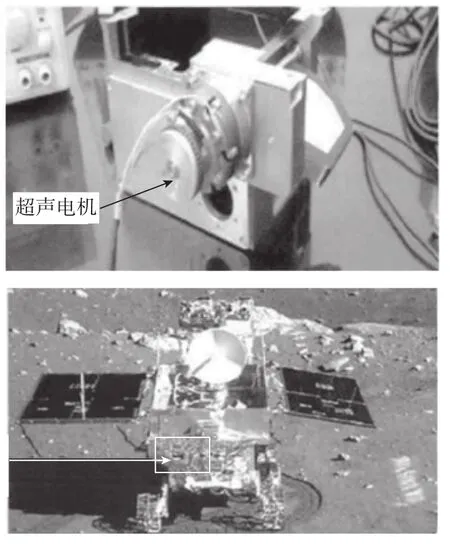
圖2 應用于嫦娥三號上的超聲電機Fig.2 Ultrasonic motor applied to the Chang'e three
2 磁懸浮電機
傳統電磁式電機多采用機械式傳動軸承,在電機工作在大功率和高轉速的工況下,電機的轉子軸與軸承之間存在劇烈機械摩擦,這就帶來一系列問題,諸如摩擦損耗大、電機噪聲高、振動情況嚴重等,就會導致電機壽命短、系統效率低和系統可靠性差等問題[15,17]。
針對機械軸承以上缺點,磁懸浮軸承以其完全無需機械接觸的突出特點,改變了電機傳統的支撐方式,從原理上解決了機械軸承由于摩擦帶來的種種問題。
2.1概念及原理
磁軸承電機出現在磁懸浮電機之前,從原理上實現了電機的磁懸浮旋轉。一般來講,如果電機使用磁軸承實現磁懸浮支撐需要3個磁軸承,2個磁軸承位于電機轉子軸徑向上,實現電機轉子徑向支撐;還有1個磁軸承位于電機轉子軸向上,此位置的磁軸承用于約束轉子軸向位移[16]。
磁懸浮電機是指在傳統電磁式電機轉矩繞組的基礎上增加一套懸浮繞組,通過兩繞組的磁場相互作用,從而實現電機的懸浮和旋轉。磁懸浮電機與磁軸承電機相比,減少了轉子徑向的磁軸承,并且它的懸浮繞組可以放置在電機定子上,使整體結構變得緊湊,空間利用率提高,電磁效率提升,制造成本降低。不過,磁懸浮電機系統的復雜性仍比較高,這一點有待改進[16]。
目前,國內外研究人員已經研制出結構更為簡單、緊湊、電磁效率更高、生產成本更低的新型磁懸浮電機,例如磁懸浮單繞組電機、單相磁懸浮永磁同步電機[16],這些新型磁懸浮電機的出現為磁懸浮電機從理論走向實際奠定了堅實的基礎。
2.2主要優缺點
磁懸浮電機與傳統電磁式電機對比,磁懸浮電機主要有以下的優點。
1)如圖3所示,傳統電磁式電機為了支撐電機轉子軸,在轉子軸向兩端放置了機械軸承,通過接觸和機械摩擦支撐電機轉子軸,在電機旋轉的過程中不可避免地產生了摩擦損耗,這會使電機發熱嚴重,整體效率降低。而磁懸浮電機轉子通過懸浮繞組與轉矩繞組的磁場相互作用而懸浮[16],完全舍棄了傳統的機械軸承,避免了摩擦發熱,從根本上提高了電機的整體效率。

圖3 磁軸承電機結構Fig.3 Structure of magnetic bearing motor
2)傳統電磁式電機由于轉子軸與軸承接觸,在高轉速大功率的工況下,摩擦帶來的沖擊振動會磨損電機轉軸和機械軸承,降低了電機的使用壽命,限制了傳統電機在高轉速大功率方向的發展。磁懸浮電機消除了振動沖擊對電機使用壽命的不利影響,最大程度上減小了使用噪聲,開辟了電機在極靜領域等對噪聲要求嚴格的領域內的應用。
同時,磁懸浮電機也有一定的局限性,主要體現在以下方面。
1)轉子徑向的磁場會限制臨界轉速,使得電機最高工作轉速降低;磁軸承占據了大部分的軸向空間,使得整個電機系統體積龐大,制造成本高,使用價值不高[16]。
2)轉矩磁場和懸浮磁場的耦合嚴重,系統控制規律復雜,當下仍沒有使得二者完全解耦的控制算法,所以如何實現這兩個磁場的解耦控制才是推廣磁懸浮電機應用的關鍵。
2.3磁懸浮電機的分類
廣義上將應用了磁懸浮技術的電機都稱為磁懸浮電機。所以磁懸浮電機可以分為磁懸浮軸承電機和磁懸浮旋轉電機。
磁懸浮軸承電機主要解決的問題是通過磁懸浮的方式完成電機軸的支撐[18]。可以細分為:徑向磁懸浮軸承、徑向推力磁懸浮軸承和電磁懸浮軸承三類。
徑向磁懸浮軸承是由2個徑向同軸磁化方向相反的空心圓柱組成。當2個磁化圓柱軸向重合、徑向同心時,這2個磁化空心圓柱所受徑向磁場推力為零。但當磁化圓柱發生軸線方向的偏移時,2個圓柱之間磁場產生的排斥力使這2個圓柱軸線趨于一致,從而可以實現軸承徑向的自穩定[18]。但是這種磁軸承軸向穩定性欠佳,故應用范圍不廣[19]。
徑向推力磁懸浮軸承與徑向懸浮軸承相比僅僅是2個空心圓柱筒在軸向上偏移一定角度,這樣做可以保持徑向的穩定性,而且可以最大程度上穩固軸向穩定性和角穩定性。
電磁懸浮軸承是一種多自由度的利用電磁力控制的磁懸浮軸承。轉軸兩端均由水平和垂直兩個方向的電磁系統來控制,而該軸承軸向位置由驅動部分進行控制[20]。此種軸承特點是控制較為復雜,成本較高,適用于低轉速大轉矩的場合。
2.4應用領域與發展趨勢
作為一種新型電機,磁懸浮電機以其舍棄機械軸承、無摩擦、發熱少、效率高等特點在航空航天、船舶、車輛系統、化工、飛輪儲能等領域內均有良好的應用[16]。在某些需要超高速旋轉,一般轉速達到80000r/min~100000r/min的領域內的應用優勢尤為明顯,在如此高的轉速下,傳統電磁式電機的噪音和振動對周圍工作的設備帶來很大影響;除此之外,其振動對電機軸和軸承的磨損也相當嚴重。
近些年來,磁懸浮電機已經成為目前新型電機領域內的研究熱點。
在國外,日本學者A.Chiba、M.Okada在各種傳統電機磁懸浮技術應用的背景下,創新地提出了交替極永磁型磁懸浮電機。如圖4所示,這種新型磁懸浮電機改變了傳統電機的磁路,在電機的結構上實現了轉矩磁場和懸浮磁場的解耦,并成為了今后磁懸浮電機領域的一個重要發展方向[16]。
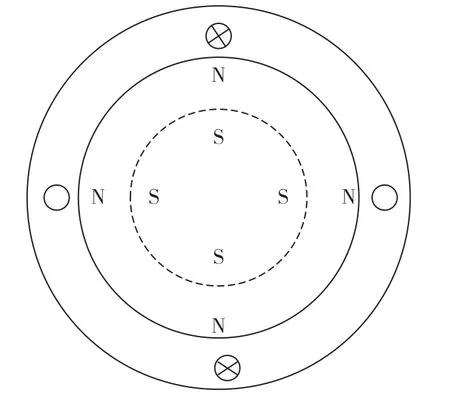
圖4 交替極永磁型磁懸浮電機結構簡圖Fig.4 Structure diagram of alternate pole permanentmagnet type bearingless motor
2000年,瑞士學者S.Sliber在經歷多次失敗之后成功研制了單相磁懸浮永磁同步電機,這種新型電機進一步簡化了復雜的懸浮系統的結構,為將來磁懸浮電機從實驗室走向工業化生產道路打下了堅實的基礎。
在國內,浙江大學率先對感應型磁懸浮電機的矢量控制及懸浮力模型建立作了相關研究[21];沈陽工業大學成功研發了小容量磁懸浮永磁同步電機,這個電機應用在人工心臟血管中;江蘇大學與蘇黎世聯邦學院合作研制成功了一臺功率為4kW的永磁薄片磁懸浮電機工業化樣機[16]。
歸納起來,磁懸浮電機未來的發展趨勢可以概括為:1)電機本體數學模型的建立;2)電機控制策略的研究(即兩套繞組磁場的解耦控制);3)新型傳感器的發展以及磁懸浮電機專用硬件控制電路的完善。
2.5磁懸浮電機在航空航天領域內的應用
磁懸浮支撐技術的應用情況如下:
日本文部省宇宙科學研究所于2004年發射了Solar-B太陽觀測衛星,這顆衛星采用了一個磁懸浮動量輪,在減小執行機構質量的同時,提高了航天器指向精度的穩定性至亞角秒級別[22]。從而徹底改變了動量輪通過傳統的機械式滾珠軸承的支承方式,從根本上規避了應用機械軸承會帶來摩擦損耗、噪聲大、機械沖擊嚴重等嚴重缺點。
NASA于20世紀70年代、80年代分別投資給Goddard空間飛行中心(GSFC)和Marshall空間飛行中心(MSFC)。1987年,這兩大研究機構成功研制了適用于航空飛行器的動量飛輪儲能的電磁懸浮軸承,并研究了該電磁懸浮軸承的能量組合和姿態控制技術,在原理樣機上實驗成功,從而為飛輪儲能應用在包括航空航天領域在內的各大工業領域打下了堅實基礎[22]。
1988年,美國制定了IHPTET計劃,把大力發展多電/全電航空發動機作為未來一項工作重心。在接下來的10年時間中,包括美國在內的英國、法國、德國和瑞士等多國成立了聯合研制課題組,專門研究磁懸浮軸承支撐的航空發動機[22]。目前,美國、日本等國已經分別成功研制出了可以在400℃和510℃下連續穩定工作1500h的磁懸浮航空發動機原理樣機,該磁懸浮航空發動機比傳統的發動機質量小、效率高,在未來有不可估量的應用前景[23]。
3 開關磁阻電機
3.1概念及原理
開關磁阻電機(Switched Reluctance Motor,SRM)一詞最早出現在美國學者S.A.Nasar于1969年發表的論文中。文中指出,開關磁阻電機是一種具有開關性和磁阻性的電機。所謂開關性是指電機必須工作在一種連續的開關模式;所謂磁阻性是指從結構上來講,開關磁阻電機是一種雙凸極電機,定轉子具有可變的磁回路[24]。
開關磁阻電機在結構上與反應式步進電機相似,是一種雙凸極變磁阻電動機,因此開關磁阻電機是一種大步矩角的步進電機,如圖5所示。
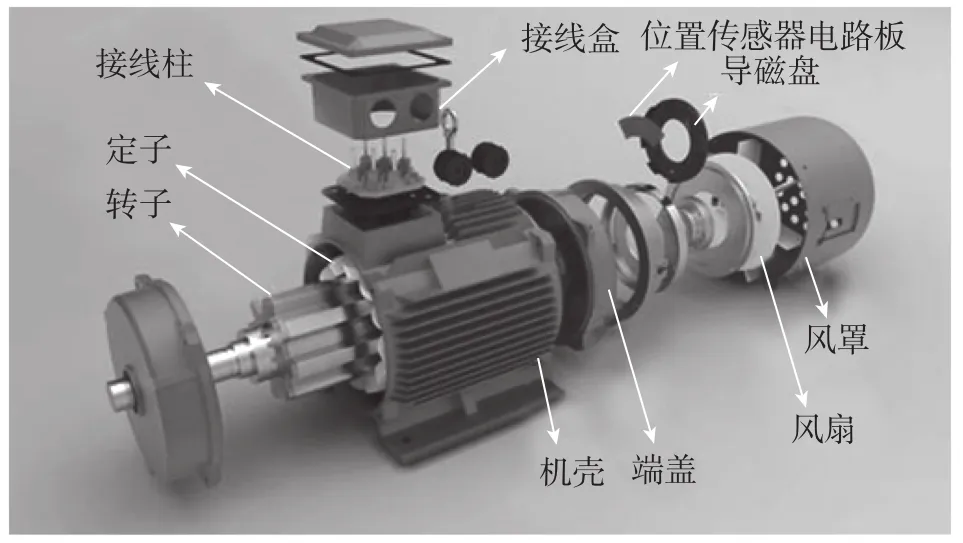
圖5 開關磁阻電機結構Fig.5 Structure of switched reluctance motor
開關磁阻電機在運轉時遵循“磁阻最小原理”,即磁通總要沿著磁阻最小的路徑閉合,而具有一定形狀的鐵芯在移動到最小磁阻位置時,必使其主軸線與磁場軸線重合[25]。這類似于磁鐵吸引鐵質物質的現象[24]。
3.2開關磁阻電機的優點及缺點
開關磁阻電機作為一種新型電機,它具有許多突出優點:
1)開關磁阻電機結構簡單、適用于高轉速。開關磁阻電機轉子上通常沒有繞組,與傳統的異步電機、同步電機相比,轉子結構大大簡化。而其定子上通常僅有幾個集中繞組,電機整體制造成本低下,可靠性高[24]。由于電機整體結構簡單,所以非常適合高轉速旋轉,目前開關磁阻電機最高轉速可達20000r/min以上。
2)開關磁阻電機各項繞組獨立工作,電機系統容錯性高。從結構上看,各相繞組和其磁路彼此獨立,沒有耦合,每一相繞組可以在一定范圍內產生各自獨立的電磁轉矩。從調速系統控制方面看,每相繞組對應的功率管總是由獨立的驅動控制器控制,其中某相繞組故障并不影響其他相的正常工作[24]。
但是,傳統的開關磁阻電機調速系統卻存在著幾個固有的缺點:
1)磁阻式電機的能量轉換效率比電磁式電機能量轉換效率低下,這也直接導致了開關磁阻電機的功率密度和轉矩密度低[24]。
2)開關磁阻電機最突出的問題是它的轉矩脈動大。電機正常工作時的轉矩脈動一般為16%左右。從而帶來了嚴重的噪聲問題和諧振問題,影響開關磁阻電機在某些場合的應用。
3)如果想讓開關磁阻電機運行在轉速閉環的系統中,必定要用傳感器檢測電機轉子位置,而這樣做會使整個系統復雜,調試困難,而使用分辨率不高的位置傳感器會使整個調速系統的性能變差[24]。
3.3開關磁阻電機的應用領域
由于開關磁阻電機結構簡單可靠、工作轉速高、容錯性好、制造成本低等優點,目前已廣泛地應用于工業生產的各個領域:航空航天領域、家電領域、電動機車驅動領域、煤炭工業領域和高速運轉的工業領域。
例如在電動機車驅動領域,開關磁阻電機以其啟動和制動轉矩大、電流小的出色性能,以及可以缺相工作的容錯性能成為電動機車領域內首選驅動電機。英國SRD Ltd.成功將開關磁阻電機作為有軌電車的驅動電機,電車運轉平穩,性能優良。繼英國之后,日本也研制出了用于新能源汽車驅動的50kW的開關磁阻電機[25]。
開關磁阻電機同時也存在諸如轉矩脈動大、能量轉換率低等缺點,因此在今后的研究工作中應該將以下幾點作為開關磁阻電機的發展方向和研究重點[25]:1)轉子位置間接檢測技術;2)轉矩脈動抑制技術;3)噪聲振動控制技術;4)先進的現代控制理論。
3.4開關磁阻電機在航空航天領域的應用
NASA開發了一種航空燃氣渦輪發動機用30kW開關磁阻起動/發電機系統有效電機質量僅為7.71kg,最高轉速達52000r/min,美國已經將高速開關磁阻起動/發電機系統作為未來多電飛機和全電飛機電源系統首選方案[26]。
除此之外,NASA還與美國空軍(USAF)合作開發了高速航空燃油泵電機和航空滑油泵電機系統,這些系統中的執行機構均為開關磁阻電機[25]。
在國內,開關磁阻電機的相關研究開展的比較晚,其中以南京航空航天大學、西北工業大學為代表的高校科研團隊,在開關磁阻電機的設計理論、方案優化、轉矩脈動和諧振抑制、先進控制策略,以及開關磁阻電機用于航空起動發電領域等方面均開展了一定研究。
其中,南京航空航天大學開發了一臺6kW的270V高壓直流航空開關磁阻電機起動/發電原理樣機[27]。
西北工業大學也開發了一臺4kW的開關磁阻電機起動/發電原理樣機[28],并對該樣機的容錯缺相運行能力進行了研究和實驗論證。
4 結論
通過對文獻的總結與分類整理,從超聲波電機、磁懸浮電機、開關磁阻電機的概念及原理、主要優缺點、電機分類、電機不同應用領域,尤其是在航空航天領域內的應用情況作了較為詳細的介紹,除此之外還介紹了這幾種電機在國內外發展趨勢。雖然國內外關于這三種電機的研究在理論與應用上都已經取得了不少進展,但是還有許多問題需要解決,如磁軸承系統實現進一步降低成本、降噪和降耗的研究。制約發展的是缺少適于SR電機技術需求的專用模塊、專用芯片,成熟、實用的無直接位置檢測器也需要盡快進一步開發。相信經過理論的深化和技術的提高及多方面的重視和努力,這三種電機將會有廣闊的發展前景,尤其在航空航天領域會有很大的發展空間。
[1]胡敏強,金龍,顧菊平.超聲電機原理與設計[M].北京:科學出版社,2005. HU Min-qiang,JIN Long,GU Ju-ping.The principle and designofultrasonicmotor[M].Beijing:Science Press,2005.
[2]趙淳生,李朝東.日本超聲電機的產業化、應用和發展[J].振動、測試與診斷,1999,19(1):1-7. ZHAO Chun-sheng,LI Zhao-dong.The industrialization,application and development of ultrasonic motor[J]. Journal of Vibration,Measurement&Diagnosis,1999,19(1):1-7.
[3]Ueha S,Tomikawa Y.Ultrasonic motor:theory and applications[M].London:Oxford Science Press,1993.
[4]Britten F J.Britten's watch&clock maker's handbook,dictionary and guide[M].Olympic Marketing Corp,1987.
[5]Kurosawa M,Ueda S.Hybrid transducer type ultrasonic motor[J].IEEE Transactions on UFFC,1991,38(2): 89-91.
[6]趙向東.旋轉型行波超聲電機動力學模型及性能仿真的研究[D].南京航空航天大學,2000. ZHAO Xiang-dong.Research on the dynamic model and performance simulation of rotary traveling wave ultrasonic motor[D].Nanjing University of Aeronautics&Astronautics,2000.
[7]郭海訓.大力矩高精度超聲波電機的基礎研究[D].浙江大學,2002. GUO Hai-xun.Basic research of high precision ultrasonic motor[D].Zhejiang University,2002.
[8]章順勤.超聲波電機定子的有限元分析及其結構優化設計[D].浙江工業大學,2008. ZHANG Shun-qin.Finite element analysis and structure optimum design of ultrasonic motor stator[D].Zhejiang U-niversity of Technology,2008.
[9]周鐵英,陳宇,鹿存躍,等.超聲波電動機在透鏡調焦中的研發、應用和展望[J].微特電機,2007,35(11): 52-55. ZHOU Tie-ying,CHEN Yu,LU Cun-yue,et al.The development,application and prospect of ultrasonic motor in lens focusing[J].Small&Special Electrical Machines,2007,35(11):52-55.
[10]Bar-Cohen Y,Hagood N W,Argelio M,et al.Development of an ultrasonic solid state motors for space applications[J].A Proposal to JPL Directors Discretionary Fund FY,94:1-11.
[11]Schoenwald J S,Beckham P M,Rattner R A,et al.Exploiting solid state ultrasonic motors for robtics[C].IEEE International Ultrasonics Symposium,1988:513-517.
[12]郭吉豐,沈潤杰,賈叔仕.超聲波電機在深空探測系統中的應用[C].中國宇航學會深空探測技術專業委員會第一屆學術會議,2005. GUO Ji-feng,SHEN Run-jie,JIA Shu-shi.Applications of ultrasonic motors in space exploration[C].Proceedings of the 1stAnnual Symposium on Space Exploration,2005.
[13]趙淳生.面向21世紀的超聲電機技術[J].中國工程科學,2002,4(2):86-91. ZHAO Chun-sheng.The technology of ultrasonic motorfor twenty-first century[J].China Engineering Science,2002,4(2):86-91.
[14]沈大雷,寇曉潔,黃鳴陽.超聲電機應用“玉兔”車新技術實現平穩軟著陸[N].中國教育報,2013-12-18(8). SHEN Da-lei,KOU Xiao-jie,HUANG Ming-yang.The application of ultrasonic motor"rabbit"car new technology to achieve a smooth soft landing[N].China Education News,2013-12-18(8).
[15]鄭朝科,唐順華.電機學[M].上海:同濟大學出版社,1990. ZHENG Zhao-ke,TANG Shun-hua.Electromechanics[M].Shanghai:Tongji University Press,1990.
[16]胡道天.磁懸浮感應電機功率驅動控制系統研究[D].揚州大學,2004. HU Dao-tian.Power drive control system of magnetic levitation induction motor[D].Yangzhou University,2004.
[17]Salazar AO,Chiba A,Fukao T.A review of developments in bearingless motors[C].Proceedings of the 7thInternational Symposium on Magnetic Bearings,2000.
[18]謝寶昌,任永德,王慶文.磁懸浮電機及其應用的發展趨勢[J].微電機,1999,32(6):28-30. XIEBao-chang,RENYong-de,WANGQingwen.Development trend of magnetic suspension motor and its application[J].Micro Motor,1999,32(6): 28-30.
[19]Delamare J,Rulliere E,Yonnet J P,et al.Classification and synthesis of permanent magnet bearing configurations[J].IEEE Transactions on Magnetics,1995,31(6): 4190-4192.
[20]Zhou F B,Grerber R,Whitley S,et al.The levitation of the SIXEP pump shaft using active magnetic bearings[J].IEEE Transactions on Magnetics,1995,31(6): 4196-4198.
[21]年珩,賀益康.感應型無軸承電機磁懸浮力解析模型及其反饋控制[J].中國電機工程學報,2003,23(11): 143-148. NIAN Heng,HE Yi-kang.Induction type non-bearing motor magnetic levitation force analytical model and feedback control[J].Proceedings of the CSEE,2003,23(11):143-148.
[22]陳銘秋,王自強.磁懸浮軸承在航空航天領域中的應用及發展前景[C].中國航空學會航空電器工程學術年會,2003. CHEN Ming-qiu,WANG Zi-qiang.Application and development prospect of magnetic suspension bearing in the field of aviation and aerospace[C].China Aviation Society Aeronautical Electrical Engineering Academic Annual Meeting,2003.
[23]Ohsawa M,Furuya E,Marui E,et a1.High temperature blower for molten carbonate fuel cell Supposed by magneticbearings[C].Proceedingsofthe6thInternational Symposium on Magnetic Bearings,Cambridge,Massachusetts,1998:32-41.
[24]吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010. WUHong-xing.Theoryandcontroltechnologyof switched reluctance motor system[M].Beijing:China E-lectric Power Press,2010.
[25]王宏華.開關磁阻電動機調速控制技術[M].北京:機械工業出版社,2014. WANG Hong-hua.Speed control of switched reluctance motor[M].Beijing:China Machine Press,2014.
[26]周強.高速開關磁阻電機的關鍵技術研究與實踐[D].南京航空航天大學,2008. ZHOU Qiang.Key technology research and practice of high speed switched reluctance motor[D].Nanjing University of Aeronautics&Astronautics,2008.
[27]劉闖,朱學忠,曹志亮,等.6kW開關磁阻起動/發電機系統設計及實現[J].南京航空航天大學學報,2000,32(3):245-250. LIU Chuang,ZHU Xue-zhong,CAO Zhi-liang,et al. 6kW switched reluctance starter/generator system design and implementation[J].Journal of Nanjing University of Aeronautics&Astronautics,2000,32(3): 245-250.
[28]李聲晉,盧剛,馬瑞卿,等.開關磁阻組合起動/發電機設計及試驗[J].電機工程學報,2000,20(2): 10-14. LI Sheng-jin,LU Gang,MA Rui-qing,et al.The switch reluctance starter/generator design and test[J].Journal of the CSEE,2000,20(2):10-14.
The Development and Application of the New Aerospace Motors
JIN Wen1,WANG Qing1,ZHOU Yang2,CAO Kuan1
(1.The 16thInstitute,China Aerospace Science and Technology Corporation,Xi'an 710100;2.Northwestern Polytechnical University,School of Automation,Xi'an 710129)
With the development of the aerospace industry in recent years,it asks more for aerospace motors,which brings out a number of new types of them,USM,Maglev Motor,SRD are representative.In this paper,firstly,we present corresponding concepts and principles of the new types of motors mentioned above.Next,we show you all the pros and cons and classifications of them,while we make comments on the current situation and applications of them.We end this paper with a summary of the applications of them in aerospace industry,and a outlook of their developments.
aerospace;ultrasonic motor(USM);maglev motor;switched reluctance motor(SRM)
TM3
A
1674-5558(2016)07-01210
10.3969/j.issn.1674-5558.2016.05.004
金雯,女,碩士,研究方向為永磁電機設計。
2015-11-22