一種改進型光纖陀螺慣導系統單軸旋轉調制方案
2016-11-03 11:29:49岳棟棟蔡春龍
導航與控制 2016年5期
岳棟棟,蔡春龍
(北京航天時代光電科技有限公司,北京100094)
一種改進型光纖陀螺慣導系統單軸旋轉調制方案
岳棟棟,蔡春龍
(北京航天時代光電科技有限公司,北京100094)
在常規單軸兩位置旋轉調制方案基礎上,提出了一種改進型光纖陀螺慣導系統單軸旋轉調制方案,該方案深入研究了載體航向角變化時,通過優選慣性測量組合(IMU)的旋轉停止位置,實現了比常規調制方案更好的導航誤差自補償效果。通過理論推導和仿真驗證,證明了本方案的有效性、可行性。
慣導系統;旋轉調制;光纖陀螺;單軸旋轉方案
0 引言
由于慣性導航系統存在誤差隨時間積累、制造成本較高、對工業基礎要求較高等不足之處[1],加上現在許多領域對慣導系統的精度要求也在不斷提高,單純從提高慣性儀表精度來提高慣導系統的精度變得越來越困難,成本也越來越高。旋轉調制技術是一種從系統角度提高慣導系統精度的方法,該技術將慣性導航系統放置在旋轉機構上,利用其旋轉運動來調制陀螺和加速度計的常值漂移等相關誤差在導航解算中的傳遞形式,使其在導航解算中呈現周期(或近似周期)的形式并通過積分作用而抵消或抑制,從而達到系統誤差的自補償效果。由于光學陀螺與加速度有關的誤差項幾乎可忽略不計,因此旋轉調制技術是提高光學陀螺慣導系統導航精度的一種有效技術手段。旋轉調制技術在國外長航時高精度光學陀螺慣導系統中已得到實用且應用效果顯著,例如Sperry公司的MK39MOD3C型捷聯慣導系統(SINS),通過單軸旋轉調制技術將SINS的精度由1n mile/8h提高到1n mile/24h,適用于艦艇等需要長時間自主導航的應用領域[2-3]。
現有單軸旋轉調制式慣導系統的轉位方案大都不隔離載體的航向運動,即控制慣性組合(IMU)相對于載體坐標系而非地理坐標系以一定的旋轉方式轉動,這時載體的航向角變化(拐彎)將會影響旋轉調制系統對水平方向慣性儀表誤差的自補償效果。例如在極端情況下,若載體的航向角速度剛好和IMU旋轉調制的角速度大小相等、方向相反,則從地理坐標系看來,IMU完全沒有轉動,自然在此時間段內就不會有旋轉調制誤差自補償效果[4]。針對這個問題,本文分析了載體航向角變化對系統誤差的影響,并提出了一種改進型單軸旋轉調制方案,可以有效降低載體航向運動對旋轉調制效果的影響,從而相應提高系統的導航精度。
1 旋轉調制型慣導系統導航算法概述
旋轉調制式慣導系統一般是在傳統捷聯慣導系統的外面加上旋轉機構和測角裝置,其導航解算仍采用捷聯慣導算法[5]。慣性元件輸出的是IMU相對于慣性空間的角速度和加速度,其算法原理就是根據姿態更新矩陣、初始對準信息和加速度計輸出,可由導航計算機實時解算出載體的速度和位置參數,但直接算出的姿態參數是IMU的姿態,還需根據測角裝置測出的IMU相對于載體的旋轉角度才能解調出載體姿態信息。其基本原理如圖1所示,s系指IMU坐標系,n系指導航坐標系。
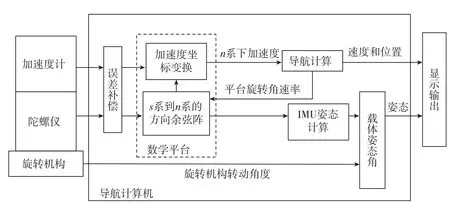
圖1 旋轉調制型捷聯慣性導航系統原理圖Fig.1 Schematic of rotation modulation SINS
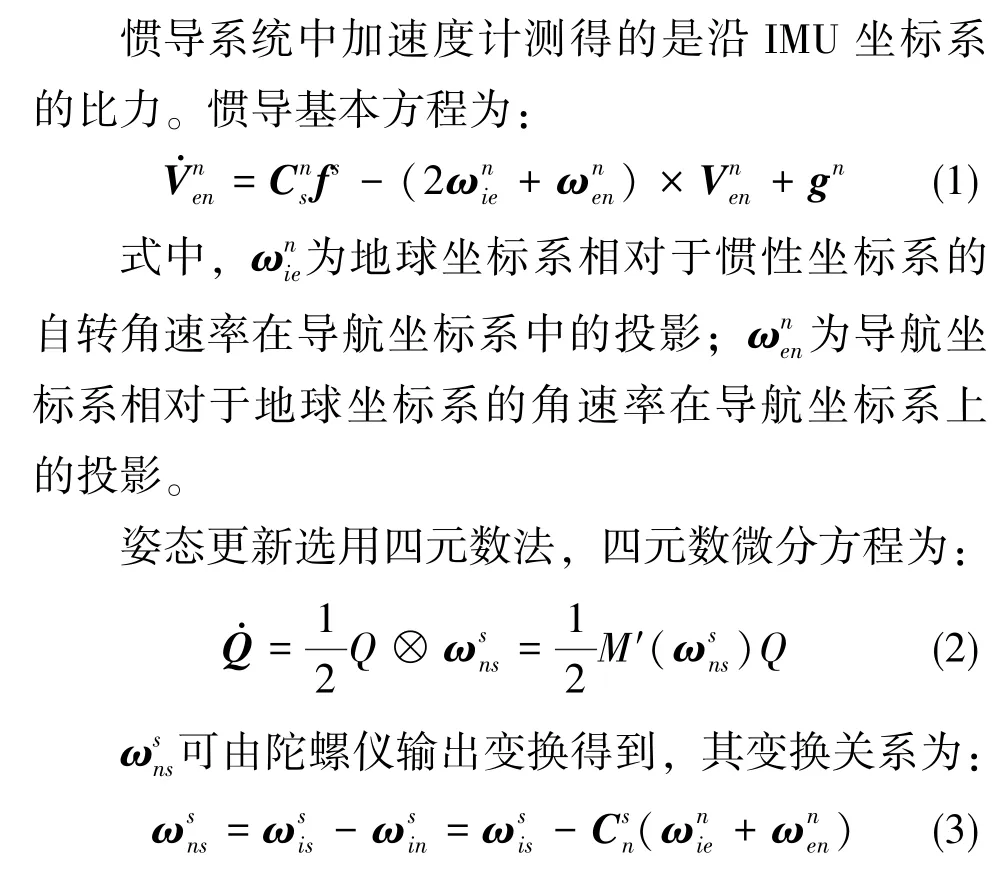
式中,ωsis即為陀螺儀的輸出。
對旋轉調制型捷聯慣導系統進行誤差分析,可得姿態誤差方程以及速度誤差方程的矢量形式,分別為:

2 改進型單軸旋轉調制方案
2.1常規兩位置轉/停方案介紹
旋轉調制方案關系到慣導系統的導航精度、整體結構和成本,選取合適的旋轉方案十分重要。IMU的單向連續轉動會引入旋轉軸方向上的陀螺儀標度因數誤差與地球自轉角速度天向分量以及旋轉角速度的耦合項,該耦合項會引起隨時間積累的天向姿態角誤差[6],所以單軸旋轉調制方案大都采取正/反轉的形式,同時從縮短旋轉機構工作時間以降低故障率的角度出發,旋轉方案一般要采取“轉/停”工作方式。
常規的單軸兩位置轉/停方案及次序如圖2所示,各旋轉次序說明如下:
次序1:從A點出發以角速度ω繞轉軸正轉180°到達位置B,并在B點停止Ts秒;
次序2:從B點出發以角速度ω繞轉軸正轉180°到達位置A,并在A點停止Ts秒;
次序3:從A點出發以角速度ω繞轉軸反轉180°到達位置B,并在B點停止Ts秒;
次序4:從B點出發以角速度ω繞轉軸反轉180°到達位置A,并在A點停止Ts秒。
以上4次轉動為1個旋轉調制周期T,并據此循環轉動。
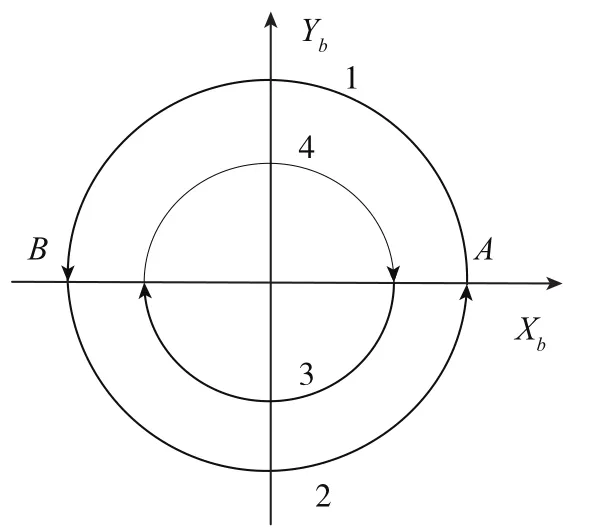
圖2 常規單軸兩位置轉/停方案Fig.2 Scheme of common single axis two positions rotation
旋轉調制型捷聯慣導系統的姿態誤差方程如式(4)所示,當載體的航向角不發生變化時,可得慣導系統在1個旋轉周期(即T=4Tr+4Ts,轉動時間內,由陀螺常值零偏引起的姿態誤差角在導航坐標系下的表達式為:
可見,在1個完整的旋轉周期內,該方案可以完全抵消水平慣性儀表常值漂移引起的導航誤差,不能消除旋轉軸向慣性儀表常值漂移引起的導航誤差。式(6)成立的條件是載體方位不發生變化,但實際中當載體轉彎使其方位發生變化時,水平方向陀螺的零偏誤差就不能完全抵消。
2.2改進型單軸旋轉調制方案介紹
旋轉調制自補償的目標就是要在1個旋轉周期T內使被調制陀螺常值漂移的積分為零,只要滿足這個條件,不需要IMU必須在每一個對稱位置停留也能完成陀螺常值漂移的自動補償。針對常規單軸兩位置轉/停方案的不足,在載體轉彎情況下,考慮能否不改變旋轉方式和停止時間,只改變IMU停留的位置來盡可能消除因水平陀螺常值漂移未完全自補償而引起的姿態誤差。針對此問題,本文提出了改進型單軸旋轉調制方案,如圖3所示,每一個調制周期包括如下8個旋轉次序:
次序1:從A點出發以角速度ω繞轉軸正轉180°到達位置B;
次序2:在B點停止Ts秒;
次序3:從B點出發以角速度ω繞轉軸正轉θ1到位置C;
次序4:在C點停止Ts秒;
次序5:從C點出發以角速度ω繞轉軸反轉180°到達位置D;
次序6:在D點停止Ts秒;
次序7:從D點出發以角速度ω繞轉軸反轉θ2到位置E;
次序8:在E點停止Ts秒。
E點也就是下個轉動周期的起始位置A點。以上8次轉動為1個旋轉調制周期,并據此循環轉動。
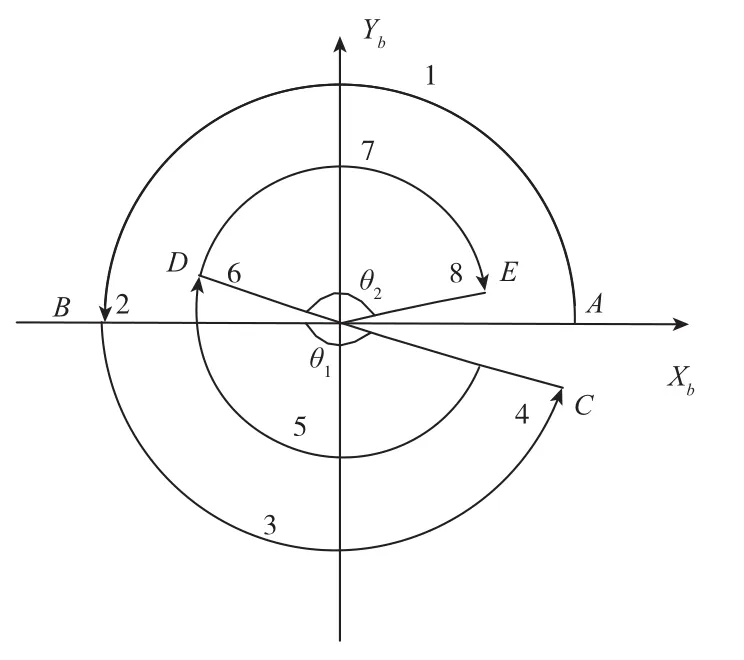
圖3 改進型單軸旋轉調制方案Fig.3 Scheme of new single axis rotation modulation
為了便于分析問題,按以上8個次序將1個完整的旋轉調制過程劃分為8個過程,畫出IMU在1個旋轉調制周期內的旋轉角速度示意圖,如圖4所示。
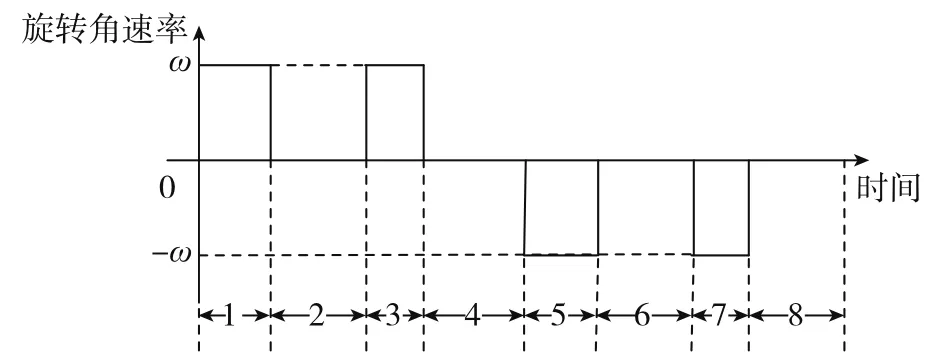
圖4 改進方案一個調制周期內旋轉角速度示意圖Fig.4 IMU's rotation rate in a period of new scheme
2.3改進型單軸旋轉調制方案實現
慣性導航系統解算得t時刻IMU坐標系相對于導航坐標系的航向角為ψ(t):
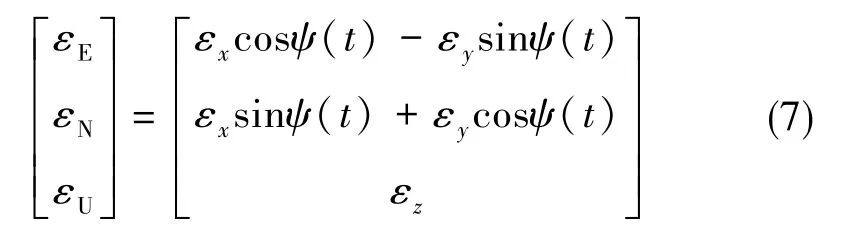
過程1由陀螺常值漂移引起的水平方向姿態誤差角為:
式中,ψk1表示過程1中每個導航周期解算得到的IMU相對于導航坐標系的航向角。
同理可得其余過程中,由陀螺常值漂移引起的水平方向姿態誤差角為:
式中,ψki表示過程i中每個導航周期解算得到的IMU相對于導航坐標系的航向角。
在本調制周期過程2結束時,優選出本調制周期過程4的停止位置,計算出來θ1,給單軸轉位機構發送相應的位置指令。假設本調制周期過程3、過程4時,載體的方位沒有發生變化,則過程4中IMU相對于導航坐標系的航向角ψ4等于過程2結束時刻導航系統解算出的IMU相對于導航坐標系的航向角ψ2加上IMU在過程3中的轉動角度θ1。
上周期過程7結束后,根據式(9)可以得到φE7、φN7,由于在上周期選取過程8的停止位置時假設ψ6=ψ8,但是實際過程中不一定滿足這個式子,這樣會存在實際過程與計算過程的自補償殘差δE1、δN1。

本調制周期過程4抵消的是本調制周期內過程2中陀螺常值漂移在導航坐標系內的積分以及上調制周期內過程5與過程7的自補償殘差,上調制周期內實際過程8與計算過程8的自補償殘差δE1、δN1。使陀螺常值漂移的積分引起的水平姿態誤差角滿足式(12)、式(13)即可:

當εx=εy=ε時,由式(12)求得:

由式(13)求得:

式(12)和式(13)解不一定相同,當兩式解不相同時,求使水平姿態角絕對值之和φ最小的θ1來選取過程4的停止位置。
在本調制周期過程6結束時,優選出本調制周期過程8的停止位置,計算出來θ2,給單軸轉位機構發送相應的位置指令。假設在本調制周期過程7、過程8時,載體的方位沒有發生變化,則過程8中IMU相對于導航坐標系的航向角ψ8等于過程6結束時刻導航系統解算出的IMU相對于導航坐標系的航向角ψ6加上IMU在過程7中的轉動角度θ2。
本調制周期過程4結束時,根據式(9)可以得到φE4、φN4,由于在本周期選取過程4的停止位置時假設ψ2=ψ4,但是實際過程中不一定滿足這個式子,這樣會存在實際過程4與計算過程4的自補償殘差δE2、δN2。
過程8抵消的是本調制周期內過程6中陀螺常值漂移在導航坐標系的積分、本調制周期內過程1與過程3的自補償殘差以及本調制周期內實際過程4與計算過程4的自補償殘差δE2,δN2。使陀螺常值漂移的積分引起的水平姿態誤差角滿足式(16)、式(17)即可:

由式(16)求得:

由式(17)求得:

式(16)和式(17)解不一定相同,當兩式解不相同時,求使水平姿態角絕對值之和φ最小的θ2來選取過程8的停止位置。
本改進方案不需要事先知道載體的轉彎速度、轉彎角度等參數,利用慣導系統解算出來的信息來優選IMU停止位置,方案具有可行性;并且對載體的轉彎過程沒有要求,不要求載體方位變化遵循固定的規律,方案具有實用價值。
3 仿真驗證
3.1仿真條件設置
這里對常規單軸兩位置轉/停方案和改進型的單軸旋轉方案進行仿真研究和對比分析。導航坐標系選為東北天地理坐標系,載體坐標系為右前上坐標系,仿真步長為0.005s,初始時刻載體3個姿態角均為0°,初始時刻載體所處的位置為北緯40.06899°,東經116.24558°,載體行駛速度為:vby=100m/s,vbx=vbz=0。只考慮兩水平陀螺的常值零偏為0.1(°)/h,不考慮其他誤差。仿真過程中,IMU在每個位置停止時間為2min,IMU的旋轉角速度為6(°)/s[7]。
3.2仿真結果分析
在3.1節的條件下,進行了不同轉彎角度和不同轉彎速度下的多組仿真,載體轉彎后,保持直線運行,每次仿真進行1h,仿真結果如表1所示。
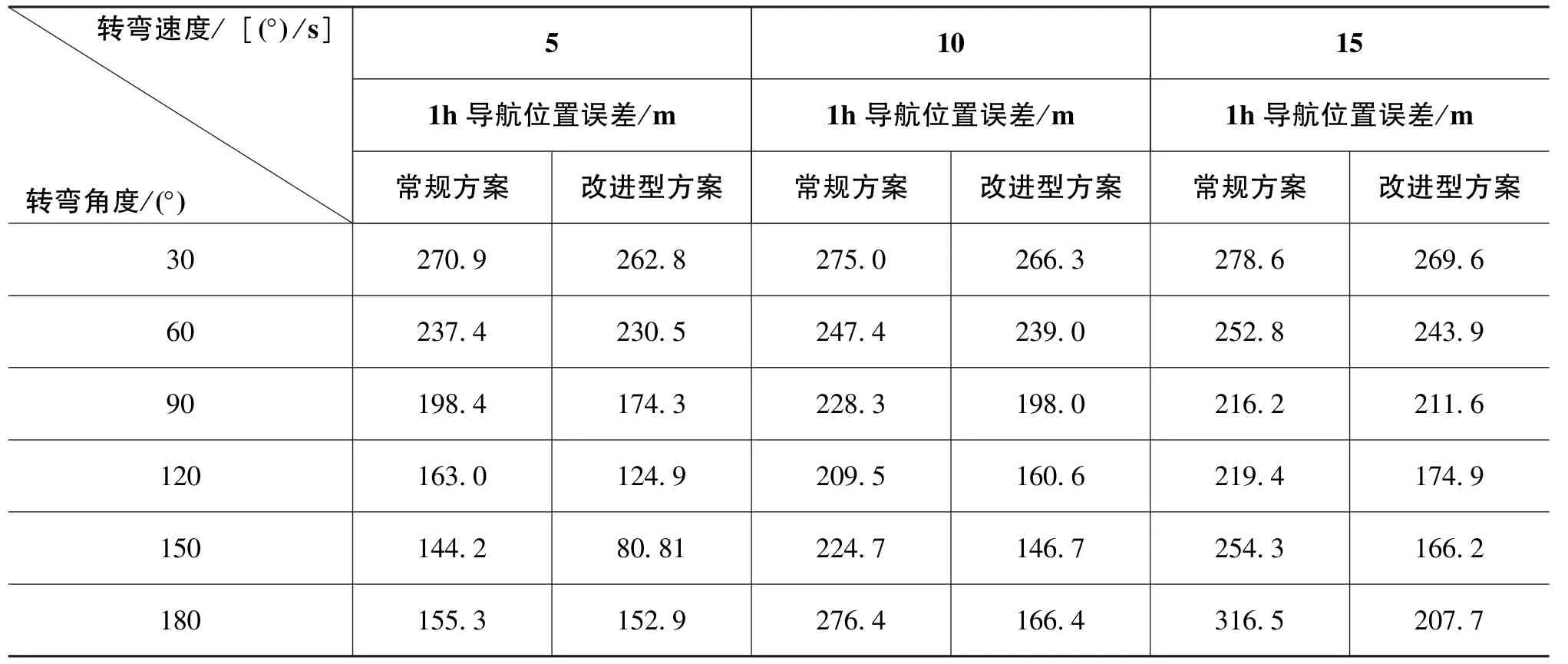
表1 不同條件時兩種方案導航位置誤差仿真結果比較Table 1 Position errors of two scheme on different conditions
從表1可以看出,載體以不同的轉彎速度完成不同程度的轉彎后直行,采用改進型單軸旋轉方案的慣性導航系統位置精度明顯優于采用常規兩位置方案的慣性導航系統。
4 結論
本文針對單軸旋轉調制式慣導系統,研究了水平方向慣性儀表常值誤差旋轉自補償的機理,在此基礎上針對載體轉彎時存在水平方向慣性儀表誤差自補償不完全的問題,提出了一種改進型單軸旋轉調制方案,理論推導表明在載體方位發生變化時,該方案可以克服常規調制方案存在的因載體航向耦合效應造成的上述誤差自補償不完全的問題,從而提高單軸旋轉慣導系統在各類行駛狀態下的導航精度。采用此改進方案,只需在導航過程中,對實時解算出來的載體航向角做相應的運算再確定轉臺合適的停止位置,實現起來比較簡單。最后通過多種運動狀況下的仿真計算和研究,驗證了本文改進型旋轉調制方案的有效性和可行性。
[1]王巍.光纖陀螺慣性系統[M].北京:中國宇航出版社,2010. WANG Wei.Inertial navigation system with fiber optic gyro[M].Beijing:China Aerospace Press,2010.
[2]Levinson E,Giovanni C S.Laser gyro potential for long endurance marine navigation[C].IEEE Position Location and Navigation Symposium,Atlantic City,NJ,1980: 115-129.
[3]Levinson E,TerHorstJ,WillcocksM.Thenext generation marine inertial navigator is here now[C].Proceedings of the IEEE Position Location and Navigation Symposium,1994:121-127.
[4]袁保倫.四頻激光陀螺旋轉式慣導系統研究[D].國防科學技術大學,2007. YUAN Bao-lun.Research on rotating inertial navigation system with four frequency differential laser gyroscope[D].National University of Defense Technology,2007.
[5]秦永元.慣性導航[M].北京:科學出版社,2006. QIN Yong-yuan.Inertial navigation[M].Beijing:Science Press,2006.
[6]孫偉.旋轉調制型捷聯慣性導航系統[M].北京:測繪出版社,2014. SUN Wei.Rotary strapdown inertial navigation system[M].Beijing:Surveying and Mapping Press,2014.
[7]Shang S T,Deng Z H,Fu M Y,et al.Analysis of singleaxial rotation modulation influence on FOG INS precision[C].Proceeding of the 29thChinese Control Conference,Beijing,China,2010:5469-5472.
A Improved Single Axis Rotation Modulation Scheme of FOG Inertial Navigation System
YUE Dong-dong,CAI Chun-long
(Beijing Aerospace Times Optical-electronic Technology Co.,Ltd.,Beijing 100094)
In this paper,on the basis of traditional rotating modulation scheme,a improved fiber optic gyro inertial navigation system's single axis rotation modulation scheme is raised.The scheme studied the changes of the head angle. Through the optimization of IMU stop position,the scheme realized a better error compensation effect than the traditional modulation scheme.This paper has carried on the theoretical derivation and simulation verification to prove the validity and feasibility of this scheme.
INS;rotation modulation;FOG;single axis rotation scheme
U666.12
A
1674-5558(2016)01-01215
10.3969/j.issn.1674-5558.2016.05.007
岳棟棟,女,碩士,研究方向為光纖陀螺捷聯慣性導航系統。
2015-12-15