穩定平臺控制系統研究
2016-11-03 22:51:09彭輝
中國高新技術企業
2016年27期

摘要:文章對穩定平臺控制系統進行了研究,首先論述了紅外成像跟蹤系統工作原理和兩通道伺服機構實現形式及系統主要性能指標的測試方法,其次介紹了控制回路構成、工作機制和具體設計方式,最后對硬件研制過程中遇到的問題進行了總結。
關鍵詞:穩定平臺控制系統;隨動系統;伺服機構;穩定平臺;控制回路;校正 文獻標識碼:A
中圖分類號:TP273 文章編號:1009-2374(2016)27-0026-04 DOI:10.13535/j.cnki.11-4406/n.2016.27.012
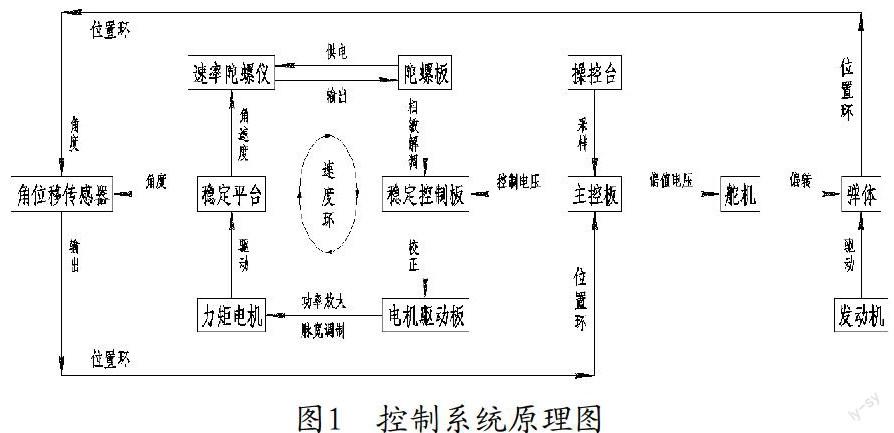
紅外導引頭接收目標的紅外輻射,經光電轉換和信號處理后,給出目標相對于導彈的方位、角速度等信息,產生目標相對于導引頭光軸的誤差信號,用以驅動伺服機構,控制導彈飛向目標并擊中目標。綜合考慮結構尺寸限制、性價比及總體戰術技術指標要求等諸多因素,設計采用兩通道飛行姿態控制系統,分別穩定、控制搜索和跟蹤時繞質心的方位和俯仰運動。各通道組成基本相同,都是由感應裝置、校正裝置和伺服機構組成。
第一,感應裝置,用于測量導彈飛行姿態的變化并輸出相應信號。該系統由角位移傳感器、穩定平臺和單自由度速率陀螺儀等組成。其中角位移傳感器的功能是把機械位移量角度轉換成電信號,且輸出的電信號與輸入的角度線性相關;穩定平臺提供測量坐標基準,利用彈體相對平臺框架的轉動產生姿態角信號;單自由度速率陀螺儀是利用陀螺的進動性來測量敏感軸方向的姿態角速率,其輸出電壓信號與輸入角速度成正比,經換算給出姿態角變化信號。……
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25