基于速度匹配的艦載導彈SINS原位標定方法研究*
2016-11-07 07:02:07龐曉楠李向陽
艦船電子工程 2016年10期
龐曉楠 王 磊 李向陽
(1.海軍潛艇學院 青島 266000)(2.海軍航空工程學院指揮系 煙臺 264001)
?
基于速度匹配的艦載導彈SINS原位標定方法研究*
龐曉楠1王磊2李向陽2
(1.海軍潛艇學院青島266000)(2.海軍航空工程學院指揮系煙臺264001)
提出了一種基于速度匹配的多種發射裝置通用的艦載導彈捷聯慣導原位標定方法,分析了標定參數誤差對于導航精度的影響,設計了標定方案和標定流程,研究了標定算法,試驗結果驗證了所提方法的可行性和有效性。
艦載導彈; 速度匹配; SINS; 原位標定方法
Class NumberTN 957.51
1 引言
慣導系統經過長時間的使用和貯存,其慣性器件(陀螺和加速度計)參數如零偏和標度因數都會發生變化,參數變化會慣導系統使用精度下降。造成參數變化的主要因素有[1~2]:
1) 慣性器件內部環境如磁性環境隨時間發生變化,造成器件標度因數變化;
2) 慣性器件其結構材料本身的彈性后效、彈性滯后、材料蠕變以及加工過程中的殘余應力等造成偏值隨時間的變化;
3) 安裝慣性器件的結構件變形;
4) 與慣性器件配套的電路板用元器件零件或其他特性發生變化,也會表現為慣性器件的零偏或者標度因數變化。
2 誤差分析
慣性器件誤差主要包括陀螺常值漂移、陀螺標度因數誤差、加速度計常值零偏、加速度計標度因數誤差和慣性器件的安裝誤差等[3~6]。
2.1陀螺常值漂移
1) 水平陀螺常值漂移
水平陀螺的常值漂移εx和εy,引起水平姿態誤差角變化:
(1)
其中,變量下標x表示載體側向,y表示載體縱向,z表示載體垂向。
水平姿態誤差角使得水平方向的加速度計算時引入重力加速度g的投影分量,從而造成速度和
位置誤差,分別為
(2)
(3)
2) 方位陀螺常值漂移
方位陀螺常值漂移εz,引起的航向姿態誤差為
φz(t)=εz×t
(4)
速度誤差為
ΔVx(t)≈V·εz·t
(5)
位置誤差為
(6)
2.2陀螺標度因數誤差
1) 水平陀螺標度因數誤差
陀螺標度因數誤差主要在角運動中表現出來。假設飛行過程中慣導俯仰角轉動Δθ,引起的俯仰角姿態誤差:
φx=Δθ×δKgx
(7)
速度和位置誤差為:
ΔVy(t)≈g·Δθ·δKgx·t
(8)
(9)
2) 方位陀螺標度因數誤差
當載體飛行航向中存在雙邊角度機動,例如蛇行機動,正負方向投影誤差可以相互抵消。而當載體飛行航向存在單邊大角度運動時,陀螺標度因數誤差將產生航向誤差。
假設載體飛行過程中航向轉動Δψ,方位陀螺標度因數引起的航向誤差為
φz=Δψ·δKgz
(10)
速度誤差為
ΔVx(t)≈V·Δψ·δKgz
(11)
位置誤差為
ΔSx(t)≈V·Δψ·δKgz·t
(12)
2.3加速度計零偏
加速度計零偏引起的速度和位置誤差為
(13)
(14)
2.4加速度計標度因數誤差
加速度計標度因數引起的速度和位置誤差為
ΔVy(t)=δKay·V
(15)
ΔSy(t)=δKay·V·t
(16)
2.5陀螺安裝誤差
1) 等效誤差
載體沒有大的角運動時,陀螺的安裝誤差等價于陀螺的常值漂移誤差。若安裝誤差變化量為6″,則產生0.0004°/h的等效陀螺漂移,可以忽略不計。
2) 航向角運動投影誤差
當導彈存在單邊大角度運動時,陀螺安裝誤差將產生角速度投影誤差。假設導彈在平飛過程中航向轉動Δψ,安裝誤差產生俯仰角投影誤差和滾動角投影誤差。
(1)滾動角誤差
φy=Δψ·δKgyz
(17)
速度和位置誤差為
ΔVx(t)≈g·Δψ·δKgyz·t
(18)
(19)
(2)俯仰角誤差
φx=Δψ·δKgxz
(20)
(21)
3) 俯仰角運動投影誤差
導彈垂直發射轉平飛過程中俯仰角運動轉動Δθ,安裝誤差產生滾動角投影誤差和航向角投影誤差。
(1)滾動角誤差
φy=Δθ·δKgyx
(22)
速度和位置誤差為
ΔVx(t)≈g·Δθ·δKgyx·t
(23)
(24)
(2)航向角誤差為
φz=Δθ·δKgzx
(25)
速度和位置誤差為
宋明理學包含兩大流派——“程朱理學”和“陸王心學”,這兩大流派代表人物的觀點中有相同之處也有不同之處,學生難以區分,因此教師可提供以下幾則材料幫助學生分析理解“程朱理學”與“陸王心學”的異同。
ΔVx(t)≈V·Δθ·δKgzx
(26)
ΔSx(t)≈V·Δθ·δKgzx·t
(27)
2.6加速度計安裝誤差
1) 等效誤差
當載體勻速飛行時,加速度計的安裝誤差等效于加速度計常值零偏。
速度和位置誤差
(28)
(29)
2) 投影誤差
當載體加速飛行時,縱向存在線加速度過程,安裝誤差將在側向產生加速度投影誤差:
ΔVx(t)=δKaxy·V
(30)
ΔSx(t)=δKaxy·V·t
(31)
2.7誤差分析小結
假設慣導系統參數變化如下:陀螺常值漂移變化0.1°/h,陀螺標度因數變化200ppm,加速度計零偏變化0.1mg,加速度計標度因數變化200ppm,陀螺和加速度計的安裝誤差變化6″。
慣性器件誤差造成的導航誤差見表1。
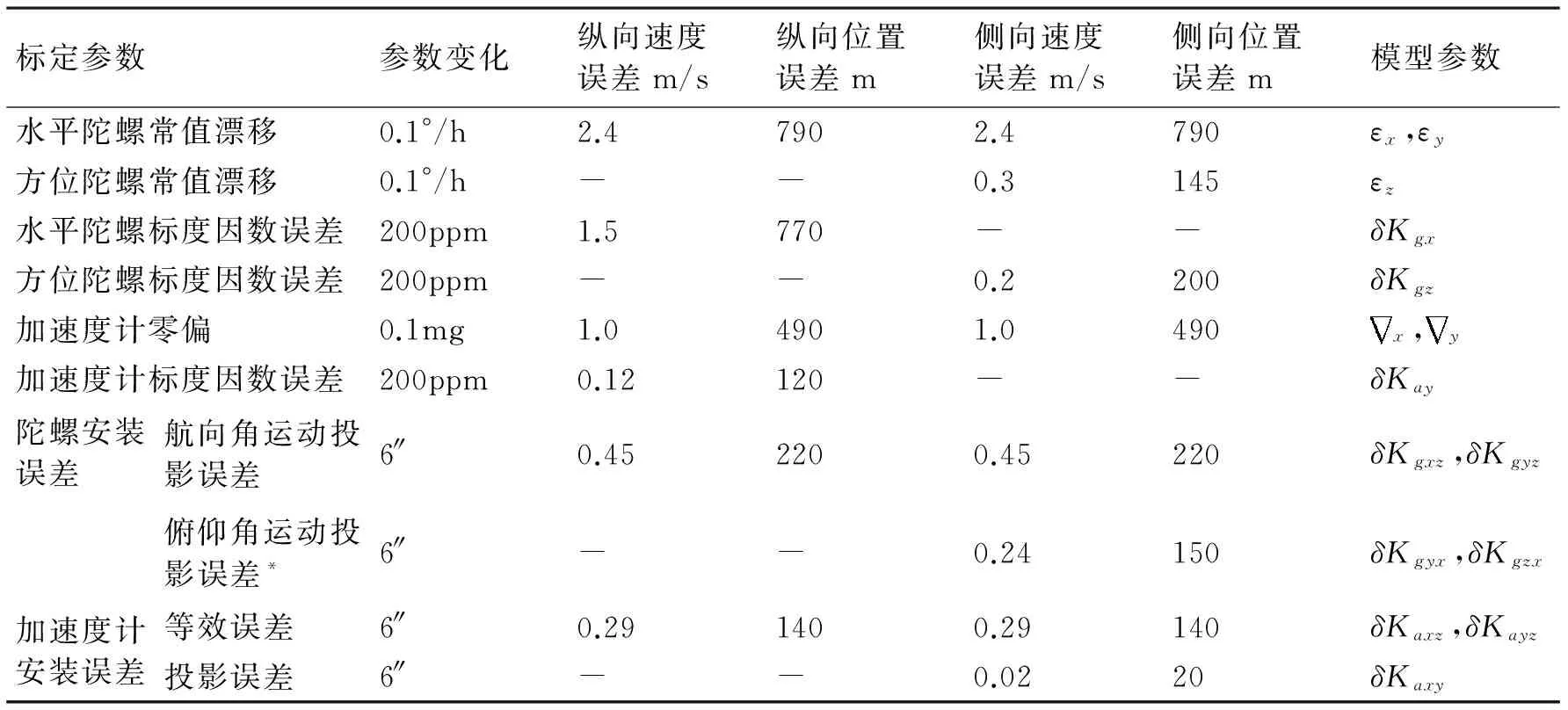
表1 導航誤差
3 基于速度匹配的原位標定方法
3.1標定方案
原位標定技術方案原理如圖1所示。
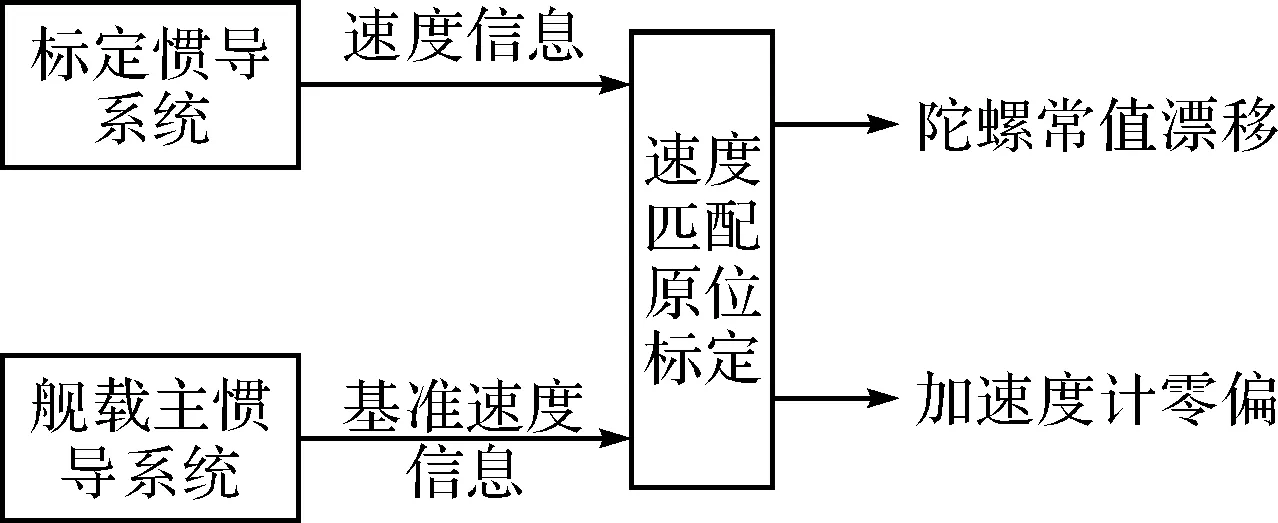
圖1 原位標定技術方案原理
3.2標定方案流程
標定流程如圖2所示。
3.3標定誤差模型
狀態變量選取15維狀態參數,包括:經度誤差、緯度誤差、高度誤差,東、北、天向的速度誤差,東、北、天向姿態誤差,三個軸向的陀螺漂移和加速度計零偏:

(32)
1) 狀態方程
狀態方程由慣導系統的位置、速度誤差方程和姿態誤差方程組成:

(33)
其中,G表示系統噪聲矩陣,W表示系統噪聲。





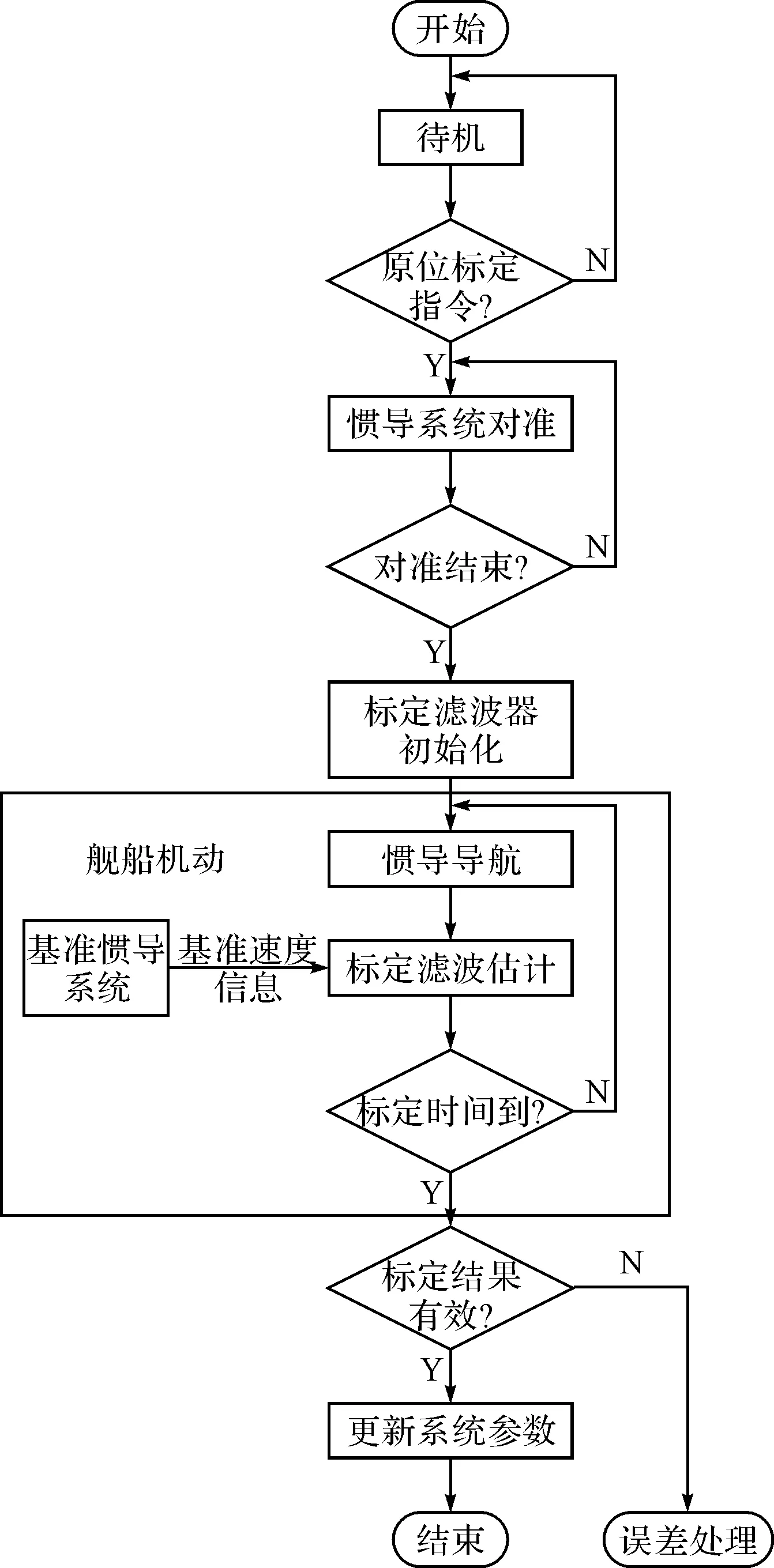
圖2 標定方案流程
2) 量測方程
Z=HX+R
觀測量Z是標定慣導系統的速度與基準慣導系統速度之差,計算公式如下:
(34)
其中,Vme,Vmn,Vmu是基準慣導速度。
3.4可觀性分析

表2 復合運動條件下標定變量的可觀測度
可以看出,在復合運動條件下,標定參數全部可觀測,而且可觀測度較好。
4 桿臂效應補償
桿臂效應誤差與基準慣導和標定慣導的安裝位置、艦船的航行狀態有關,圖3給出了桿臂效應的示意圖。
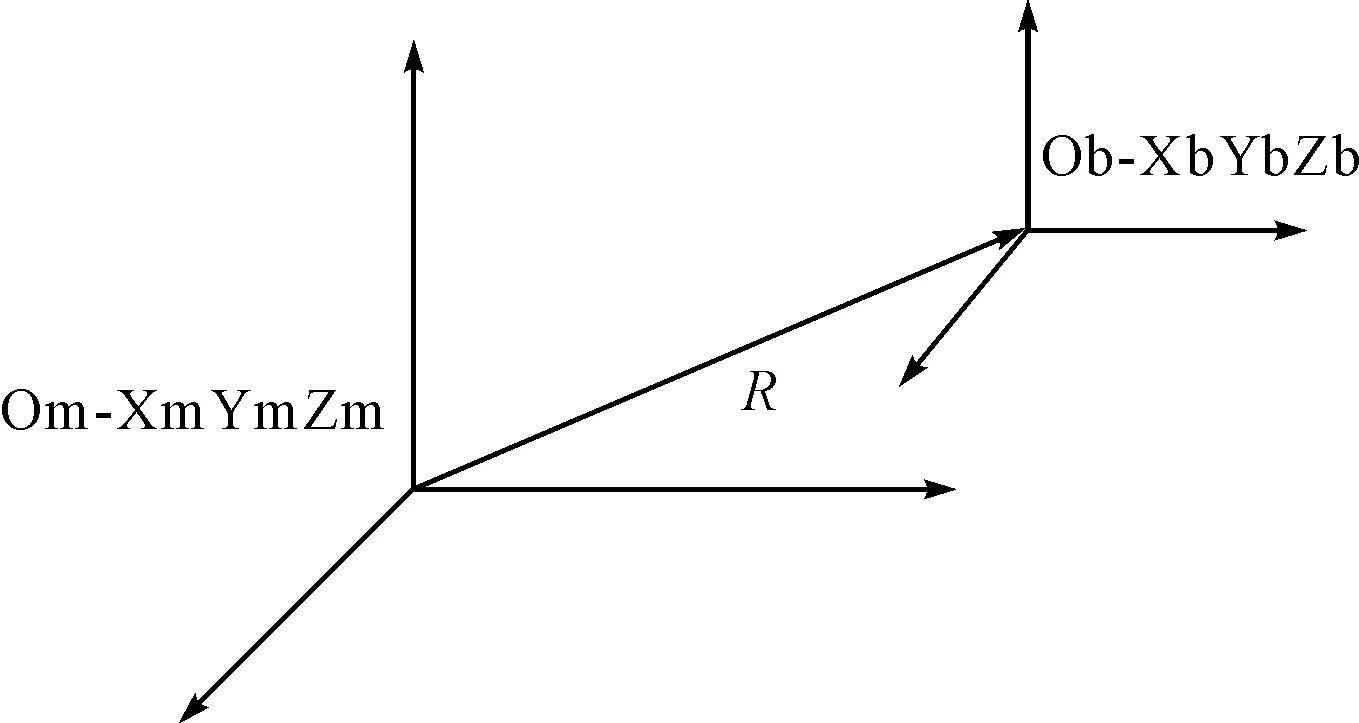
圖3 桿臂效應示意圖
對桿臂效應的補償主要有濾波估計補償法、低通濾波方法和計算補償法三種方法[7~8]。
這里采用桿臂速度誤差計算補償方法來減小桿臂效應的影響,從而提高標定精度。桿臂速度可由下式計算得到:

因此,式(4)~式(34)描述的速度誤差觀測量計算公式修正為
Z=Vb-Vm-VR
(36)
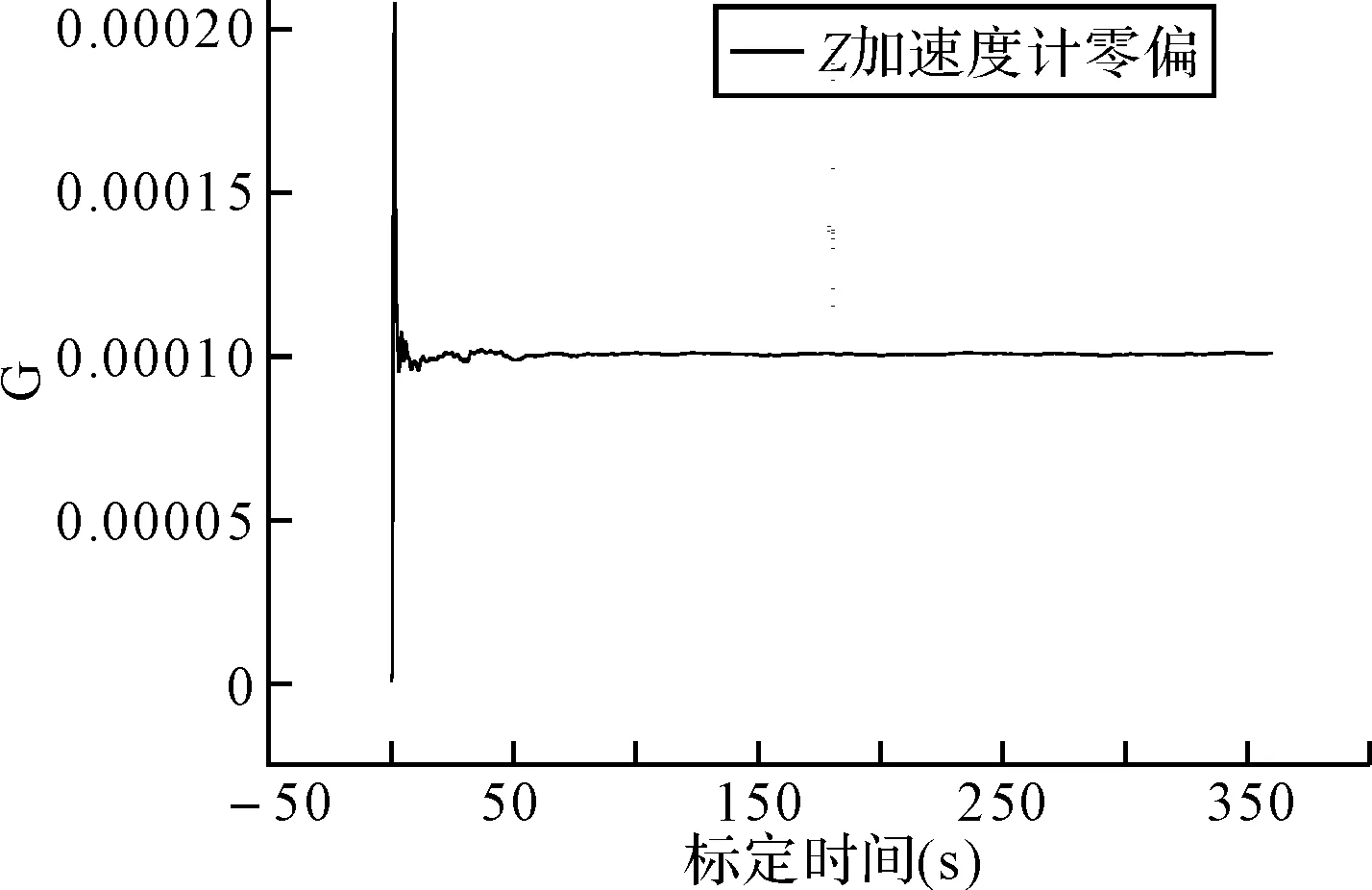
5 仿真驗證
數據設定:緯度φ=30°,艦船初始航向角45°、俯仰角0°、滾動角0°,速度20m/s。標定過程中艦船機動過程,線加速運動是北向和東向的線加速度為0.05G;角運動是航向角半圓型機動(單邊S型機動),變化幅值45°,航向角變化公式為
(37)
航向角變化曲線如圖4所示。
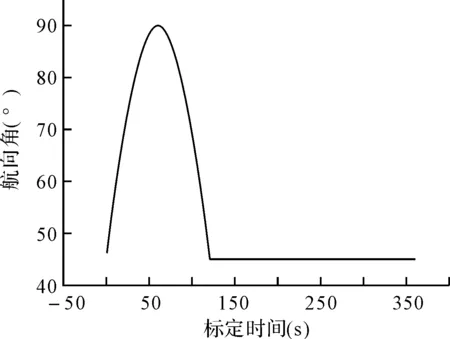
圖4 航向角變化曲線
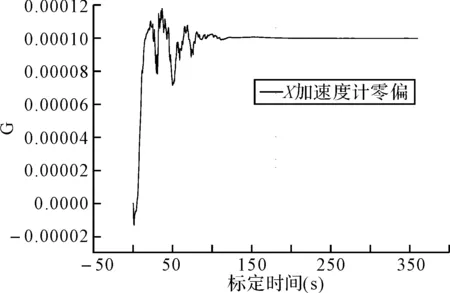
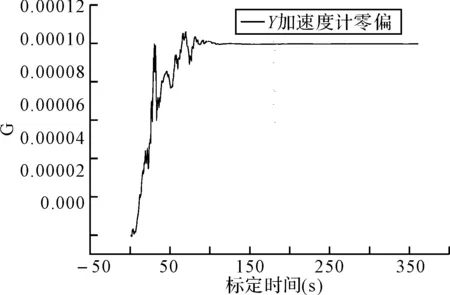
慣性器件誤差設定:X,Y,Z陀螺常值漂移為-0.01°/h,X,Y,Z加速度計零偏為0.1mG。標定濾波周期為1s。仿真結果圖5所示。
6 結語
本文在分析標定參數誤差對于導航精度影響的基礎上,設計了標定方案和標定流程,研究了標定算法,提出了一種基于速度匹配的多種發射裝置通用的艦載導彈捷聯慣導原位標定方法,并通過仿真驗證了所提方法的可行性和有效性。
[1] 袁信,俞濟祥,陳哲.導航系統[M].北京:航空工業出版社,1993.
[2] 孫昌躍,王司,鄧正隆.艦載武器慣導系統對準綜述[J].中國慣性技術學報,2005,13(4):81-88.
[3] 李蓓,高偉,王嘉男,等.傳遞對準中桿臂效應誤差的補償研究[J].彈箭與制導學報,2008(6):49-52.
[4] 房建成,周銳,祝世平.捷聯慣導系統動基座對準的可觀測性分析[J].北京航空航天大學學報,1999,25(1):714-719.
[5] Fang J C, Wan D J. A fast initial alignment method for strapdown inertial navigation system on stationary base[J]. IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1501-1505.
[6] Geshen-Meskin D, Bar-Itzhack I Y. Observability analysis of piece-wise constant systems-part I: Theory [J]. IEEE Transactions on Aerospace and Electronic systems,1992,28(4):1056-1067.
[7] 劉毅,劉志儉.捷聯慣性導航系統傳遞對準技術研究現狀及發展趨勢[J],航天控制,2004(10):51-55.
[8] 李蓓,高偉,王嘉男,等.傳遞對準中桿臂效應誤差的補償研究[J].彈箭與制導學報,2008(6):49-52.
[9] 房建成,周銳,祝世平.捷聯慣導系統動基座對準的可觀測性分析[J].北京航空航天大學學報,1999,25(1):714-719.
[10] 胡鑫,韓崇偉,李偉,等.基于四位置轉位法實現激光捷聯慣性測量組合標定[J].科學技術與工程,2010,10(8):2034-2038.
Research for In-situ Calibration Method of Ship-launched Missile Strapdown Inertial Navigation System Based on Velocity Matching
PANG Xiaonan1WANG Lei2LI Xiangyang2
(1. PLA Navy Submarine Academy, Qingdao266000)(2. Department of Command, Naval Aeronautical and Astronautical University, Yantai264001)
An all types of missile launcher shared and velocity matching based shipboard missile based in-situ calibration technology is proposed. The SINS parameter error influence on the navigation accuracy is discussed, and the calibration scheme and procedure are designed. The simulation results show the feasibility and effectiveness of the proposed approach.
ship-launched missile, velocity matching, SINS, In-situ calibration
2016年4月1日,
2016年5月20日
龐曉楠,男,講師,研究方向:導航制導與控制。王磊,男,博士,講師,研究方向:海軍兵種作戰運用研究,航空兵作戰仿真模型。李向陽,男,博士研究生,研究方向:海軍兵種作戰運用研究。
TN 957.51
10.3969/j.issn.1672-9730.2016.10.012