數碼迷彩立體動態成像算法研究
2016-11-09 06:18:06武國晶呂緒良許衛東李凌翁梟迪
兵工學報 2016年1期
關鍵詞:深度
武國晶,呂緒良,許衛東,李凌,翁梟迪
(解放軍理工大學野戰工程學院,江蘇南京210007)
數碼迷彩立體動態成像算法研究
武國晶,呂緒良,許衛東,李凌,翁梟迪
(解放軍理工大學野戰工程學院,江蘇南京210007)
現有數碼迷彩圖案的平面性和固定不變性使之難以對抗未來高技術的偵察監測,針對這個問題,提出了一種基于柱透鏡光柵的數碼迷彩立體動態成像算法。該算法充分考慮人雙目立體成像的生理特征和柱透鏡光柵分光分像的光學特性,闡述數碼迷彩立體動態化的可行性。在此基礎上,推導出迷彩立體動態成像的視差設計原理并根據背景深度信息將數碼迷彩圖像分為多幅迷彩深度序列圖。利用梳狀函數對迷彩深度序列圖進行采樣合成,最終生成一幅光柵圖像,用來裱貼于光柵板后即可實現立體動態數碼迷彩。對該算法有效性進行了仿真實驗并加以分析。
兵器科學與技術;偽裝;數碼迷彩;立體動態成像;柱透鏡光柵;視差
DOI:10.3969/j.issn.1000-1093.2016.01.016
0 引言
迷彩偽裝是偽裝中廣泛采用的一種偽裝措施[1]。其技術實質是通過技術手段提取背景的圖像特征,融入迷彩圖案實施于待偽裝的軍事目標,以達到降低目標顯著性和改變目標外形的效果。數碼迷彩是目前廣受關注的一種較新的迷彩設計技術。偽裝業界學者通過研究提出了許多創新的方法:基于聚類的[2-3],基于分水嶺的[4],基于紋理的[5-6],基于分形的[7]等。但是這些設計方法都著重于提取背景的顏色、紋理等特征而忽略了其深度特征,所設計出的迷彩圖案是平面的且固定不變的,難以對抗未來戰場的偵察監測。因此迷彩偽裝要發展就必須突破現有的設計方法,設計立體的、動態的迷彩圖案以更好地使偽裝目標與背景融合,從而提高偽裝性能。
本文研究的數碼迷彩立體動態成像算法依然遵從迷彩設計基于背景圖像特征的原則,根據人類生物視覺系統特點,借助柱透鏡光柵特有的光學特性,從背景中提取深度特征融入迷彩圖案,使之立體化動態化。如果說以往的迷彩設計方法完成了從沒有圖案到平面圖案的轉換,那么本文就是旨在完成從平面圖案到立體可變圖案的轉換。
1 立體動態迷彩設計可行性分析
1.1 雙目立體成像幾何模型
人眼可以感知對象之間的相對距離,看到有空間感的立體景物,將用于獲得縱深感而產生立體視覺的信息稱為深度暗示,它包括心理暗示和生理暗示兩個方面[8]。心理暗示由視覺經驗和視覺記憶構成,這使得人們即使只觀看一幅平面圖像或只睜開一只眼睛也能判斷出物體的遠近關系。生理暗示則基于雙目立體視覺。人的兩眼存在瞳距,在觀看物體時,將分別接收物體來自不同方向的投影,同一物體的像點落在左右兩眼視網膜相應的不同位置而清晰成像,人的大腦將具有細微差別的像巧妙地融合,形成所看到的立體圖像。數碼迷彩圖案是由多色塊狀單元所構成的,所以考慮它的立體成像時可以忽略心理暗示因素而著重于生理暗示因素,也就是著重于對雙目視差的研究。
雙目立體成像幾何模型如圖1所示。
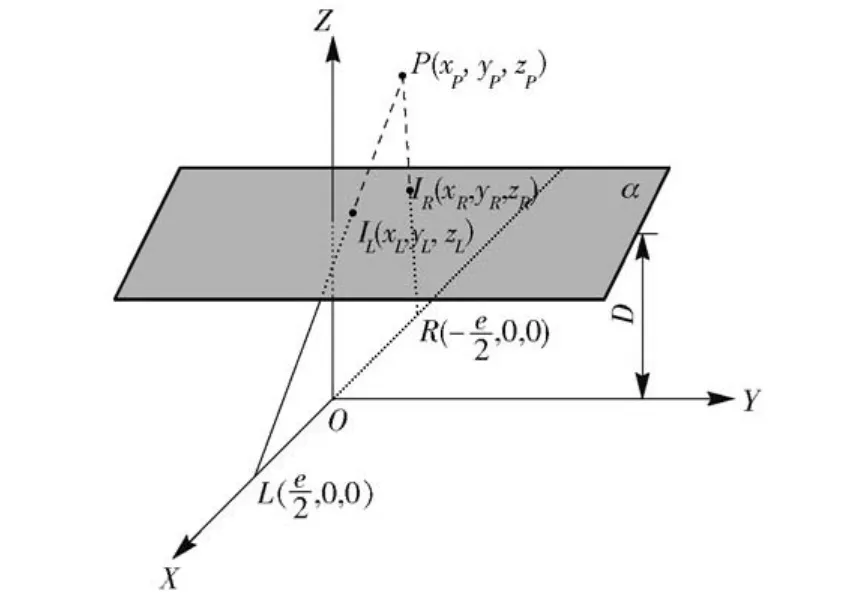
圖1 雙目立體成像幾何模型Fig.1 Geometric model of binocular stereo imaging
建立世界坐標系OXYZ,以兩眼間連線為X軸,原點O處于兩眼中心位置,e為兩眼間距距離,一般為65 mm,左右眼可表示為:L(e/2,0,0),R(-e/2,0,0)。設定光柵板所在平面為α,平面α與OXY平面平行,到人眼距離為D.人們雙眼通過柱透鏡光柵所看到的空間點P(χp,yp,zp),實際上是通過觀看光柵板上的立體圖像對IL(χL,yL,zL)和IR(χR,yR,zR),再經過大腦加工合成的像點P.相對于人眼,平面α上的立體圖相對IL和IR可以看作是任一空間點P在平面α上的投影。為了更直觀的討論,將其投影在OXZ平面上,如圖2所示。
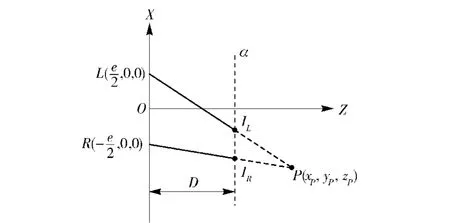
圖2 成像幾何模型在OXZ平面的投影Fig.2 Projection ofimaging geometric model on OXZ plane
根據三角形相似定理可以求得
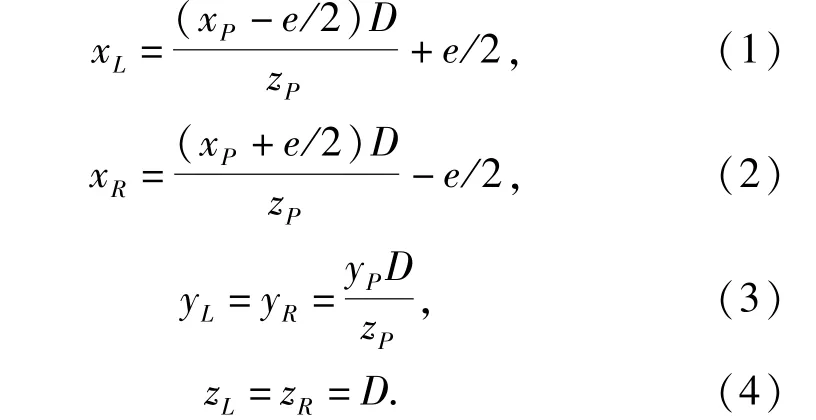
由(1)式~(4)式可得立體圖像對為
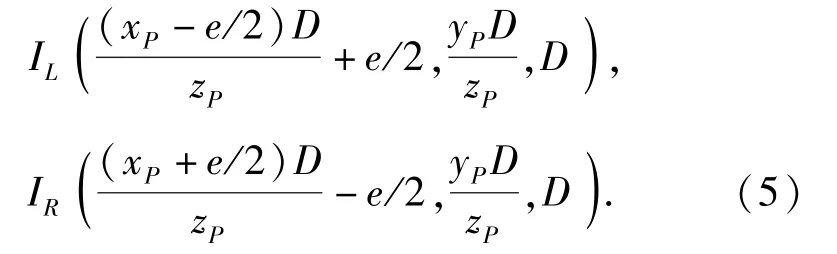
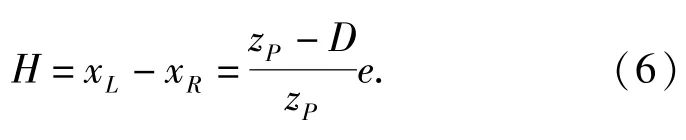
可見,空間物點P的深度信息隱含于立體圖像對IL和IR之中。觀察立體圖像對的坐標,只有橫坐標不同,也就是說,垂直視差對立體成像的影響很小,而水平視差H才是立體成像的關鍵因素。由(5)式可計算出雙目視差為
1.2 柱透鏡光柵光學特性分析
柱透鏡光柵是由多條結構和性能完全相同的柱透鏡單元線性排列組成的透明塑料薄片,垂直方向可成立體影像[9]。柱透鏡單元光路如圖3所示。
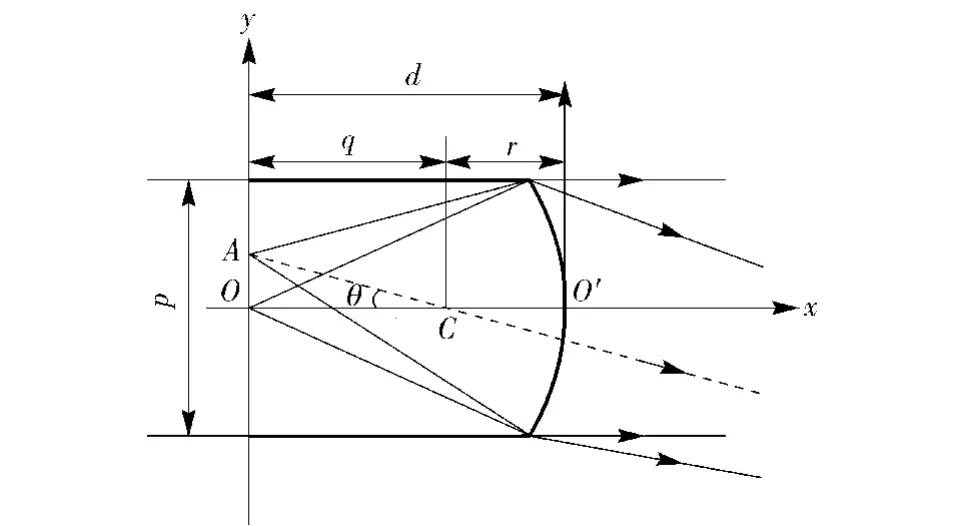
圖3 柱透鏡單元光路Fig.3 Optical path of lenticular raster unit
光柵板平面即為焦平面,所以像位于焦平面上,故f=d.根據成像性質可知:y軸上任一點經過柱透鏡折射為平行光束射出,平行光束的寬度恰與光柵的柵距p相等,傳輸方向角為

由(7)式可知:當y>0時,θ>0,出射平行光束偏向下傳輸;當y=0時,θ=0,出射平行光束平行光軸傳輸;當y<0時,θ<0,出射平行光束偏向上傳輸。這體現了柱透鏡光柵的分光分像的光學特性[10]。
結合上述兩小節的分析可知所謂迷彩立體成像是指將迷彩深度序列圖進行合理的縱向條狀分割再合成裱貼于柱透鏡光柵板后,使其分別沿不同角度投射到觀察者雙眼中,即可還原出相應的立體影像。所謂迷彩動態成像是指隨著觀察者空間觀察角度的變化,立體圖像也會隨之發生變化,從而形成動態效果。
2 迷彩深度序列圖生成
2.1 迷彩視差設計方法
相比于偵察距離來說,背景場景中的物體自身的深度變化是非常小的,因此可以近似地把一定距離區間內的物體中的各點看作在同一平面上,這樣連續場景就可以分解為一組具有不同深度的層的集合,記為Z={z1,z2,…,zk}.假設這k層每相鄰兩層的距離為s,在深度z1、z2兩層上分別任取兩個具有完全遮擋關系的點P1、P2,在圖1所示的世界坐標系中可表示為P1(χ1,y1,z1)和P2(χ1,y1,z1+s).設第1幅深度序列圖經柱透鏡光柵成像的坐標系與世界坐標系重合,第2幅深度序列圖經柱透鏡光柵成像的坐標系為Omn,與世界坐標系間的夾角為δ,如圖4所示。
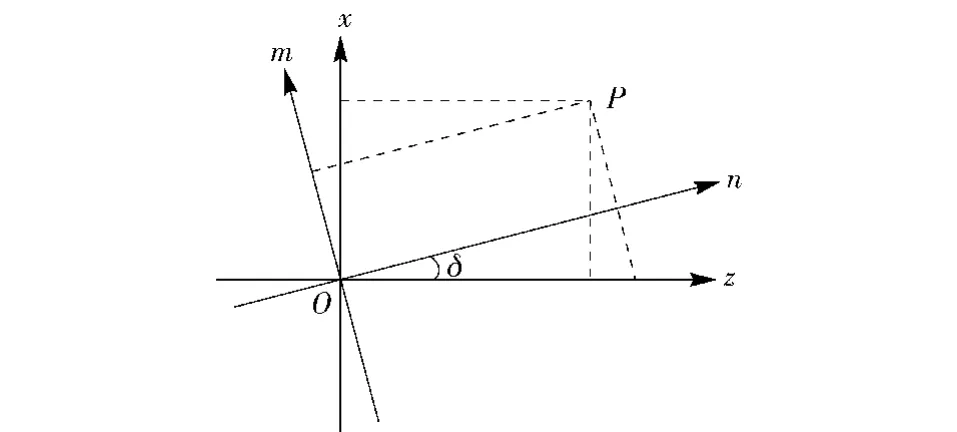
圖4 序列圖成像坐標系示意圖Fig.4 Imaging coordinates of sequence diagrams
對任一空間點P,由圖4可得:

由于點P為空間任一點,所以具有一般性,那么投影關系可用矩陣表示為
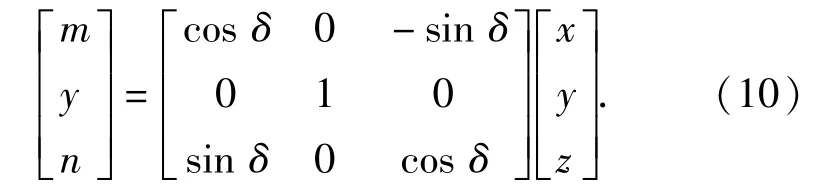
設P1、P2兩點在坐標系Omn中投影分別對應第2幅深度序列圖上兩點P'1(m1,y,n1),P'2(m2,y,n2),根據(10)式,可求出兩點間距,即水平視差為

(11)式揭示了在生成迷彩序列圖時視差設計的方法。
2.2 光柵圖像采樣合成方法
空間中的立體景物可看作是無數空間物點P(χP,yP,zP)的集合,用函數f(χ,y,z)表示,其在左眼方向zL的投影為fL(χL,yL),在右眼方向zR的投影為fR(χR,yR),人眼在觀察立體景物f(χ,y,z)時就等效于觀察fL(χL,yL)和fR(χR,yR)兩幅圖像。將m幅圖像分別沿一定角度投射出去,人眼接收到相似卻不同的視差圖像,經過大腦的處理便可獲得立體感知。所以,要想還原出立體圖像就需要研究m幅深度序列圖編碼的方法。
根據Whittaker-Shannon的采樣定理,構造梳狀函數[11-12]:
式中:n為光柵板所包含的柱透鏡單元數;m為待編碼的深度迷彩序列圖數;j為柱透鏡單元編號;i為序列圖編號;p為梳狀函數的周期,也是柱透鏡單元的寬度,即柵距。A為矩形函數rect(χ)的底面寬度,也是編碼寬度。設fi(χ,y)表示第i幅序列圖,F(χ,y)表示光柵圖像,那么,m幅迷彩深度序列圖經采樣再合成為的光柵圖像可表示為
光柵圖像合成的關鍵在于各序列圖樣條間的相互匹配,因此編碼時,1個編號的各序列圖樣條應占滿1個柵距[13],即柱透鏡光柵的柵距p應為編碼寬度A的整數倍。當編碼寬度設為1個像素時,可以得到1個柱透鏡單元可編碼的序列圖的最大幀數為m.由于光柵圖像最終要付諸印刷,裱貼于光柵板后,光柵線數l(單位lpi,每英寸中包含的柱透鏡光柵單元數目)與打印圖像分辨率I(單位dpi,每英寸打印的點陣數)應滿足:

3 實驗驗證及分析
3.1 實驗驗證
為了驗證算法有效性,如圖5所示,選取一幅基于林地背景的5色數碼迷彩進行立體動態成像。仿真實驗的參數設置見表1所示。
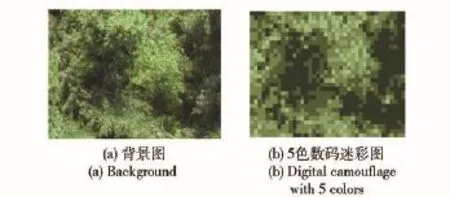
圖5 背景圖及對應的5色數碼迷彩圖Fig.5 Background and corresponding digital camouflage with 5 colors
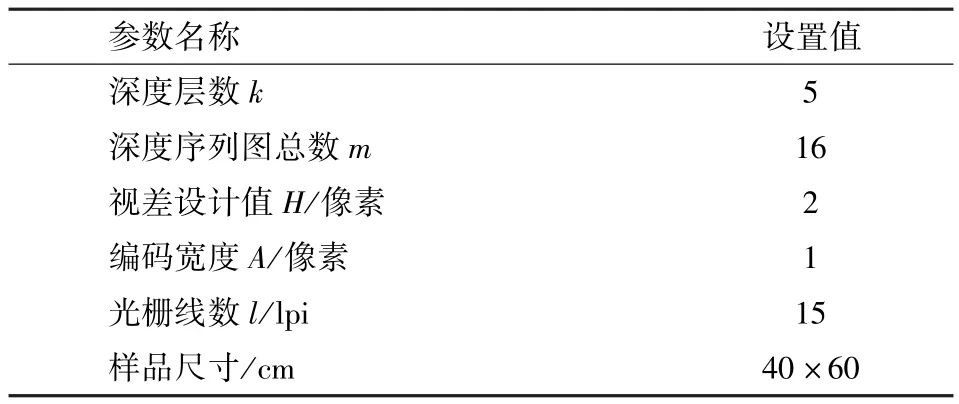
表1 仿真參數設置Tab.1 Simulation parameters setting
將背景圖劃分為5層,對其進行周期為15個像素的采樣并填充,可得到如圖6所示的效果圖。
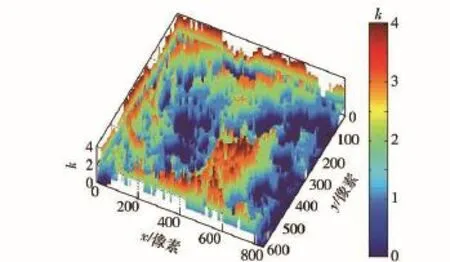
圖6 背景深度圖Fig.6 Depth map of background
根據圖6所包含的深度信息對數碼迷彩圖的斑點進行分層配置,結果如圖7所示。
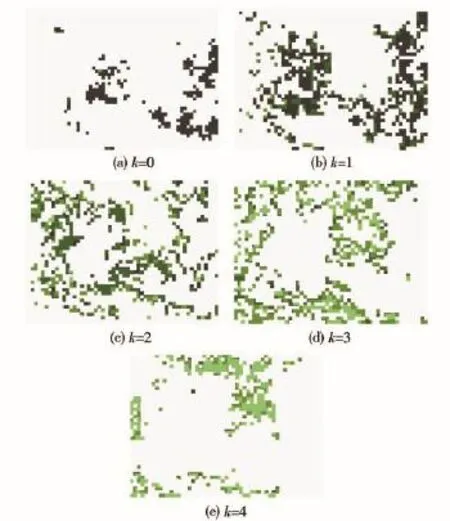
圖7 數碼迷彩斑點分層圖Fig.7 Layered speckle of digital camouflage
根據視差設計值H,深度層數k,需生成的深度迷彩序列圖總數m,設h表示當前的迷彩斑點圖層編號,可以計算出第h層的斑點位移量Δχ為

通過計算可以得到當前迷彩斑點圖層需調整的位移量的具體數值,待調整完畢后再合成即可得到如圖8所示的16幅深度迷彩序列圖。值得說明的是,斑點位移量是一個相對值,(17)式是以第5層作為基準圖層保持不動的,最后合成的序列圖并不受此影響。
榆陽區雖然幾十年來在生態建設、水土保持方面取得巨大成效,但整體上的生態系統依然是很脆弱的。因此,在搞好自身生態建設的同時,尋找一條可以讓農民穩定收入、持續發展的生態產業化道路,對整個榆林而言,具有非常重要的戰略意義。

圖8 16幅深度迷彩序列圖Fig.8 16 sequence diagrams of digital camouflage
按照2.2節方法對上述16幅深度序列圖進行采樣合成得到的光柵圖像如圖9所示。
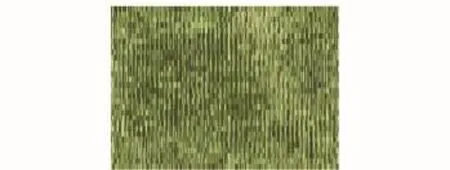
圖9 光柵圖像Fig.9 Raster image
光柵圖像經過加工裱貼于光柵板后即可制成樣板。
3.2 實驗分析
通過前述方法制備了如圖10所示的多個樣板用以觀察分析迷彩的立體和動態效果。

圖10 多個樣板實物圖Fig.10 Sample plates
通過觀察,迷彩的立體和動態效果還是較為明顯的,通過觀察者角度變化,可以看到不同的迷彩立體圖案,圖11展示了圖9制備出的光柵板在不同觀察角度下可看到的立體迷彩圖案。
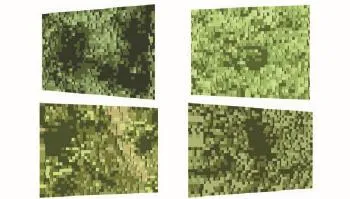
圖11 不同觀察角度下的立體迷彩圖案Fig.11 3D digital camouflages at different angles
但是立體和動態效果會隨著觀察距離的增大而明顯減弱。
根據1.1節中的(6)式可知,由于光柵圖像是裱貼于光柵板后的,所以光柵板和物點間的距離是固定的,即zP-D為一定值,設為D',那么

這說明,當觀察者遠離光柵板進行觀看時,雙目視差減小,立體感會減弱。
同時,人眼的分辨能力是有限的,我們把剛能分辨的兩物點對眼睛的張角稱為視角分辨率,它表征人眼分辨能力,一般取值為ωmin≈60"[14],也就是說,隨著觀察距離增加,樣品斑點對于人眼的張角減小,人眼對斑點的分辨能力也逐漸降低;而且由于迷彩斑點的空間混色作用,不同深度層的斑點容易形成混色,使觀察者較難分辨圖層間的空間分布關系,從而立體動態效果減弱。
立體動態效果也與光柵的參數設置有關。設光柵的折射率為n0,那么D[13]:

這說明,要制備作用距離更遠的立體動態迷彩樣品,應當選擇光柵線數更小的柱透鏡光柵板。
4 結論
本文提出了一種基于柱透鏡光柵的數碼迷彩立體動態化的算法。該算法遵從迷彩設計的原則,結合人眼視覺生理特征和柱透鏡光柵分光分像的光學特性,研究視差設計方法,將背景深度信息融入迷彩圖案中,制作了立體的動態的數碼迷彩圖案。最后通過計算機仿真實驗驗證了算法的有效性并對樣品的立體動態效果進行了理論分析。這為迷彩偽裝的立體動態化發展提供了一個新途徑。
References)
[1]胡江華.偽裝技術[M].北京:國防工業出版社,2012:84-133.HU Jiang-hua.Camouflage technology[M].Beijing:National Defense Industry Press,2012:84-133.(in Chinese)
[2]Bian P,Jin Y,Zhang N R.Fuzzy c-means clustering based digital camouflage pattern design and its evaluation[C]//10th International Conference on Signal Proceeding.Beijing,China:IEEE,2010:1017-1020.
[3]劉尊洋,王自榮,余大斌,等.塔型FCM和CIDE2000的仿造迷彩主色提取方法[J].紅外與激光工程,2010,39(2):367-371.LIU Zun-yang,WANG Zi-rong,YU Da-bin,et al.Extracting dominant colors of initiative pattern painting with CIDE2000 and pyramid FCM[J].Infrared and Laser Engineering,2010,39(2):367-371.(in Chinese)
[4]白萬民,郝陽,喻鈞.基于分水嶺方法的數碼迷彩設計 [J].計算機與數字工程,2012,40(8):110-113.BAI Wan-min,HAO Yang,YU Jun.Design of digital camouflage based on watershed method[J].Computer&Digital Engineering,2012,40(8):110-113.(in Chinese)
[5]賈其,呂緒良,吳超,等.馬爾科夫隨機場和金字塔模型用于數字迷彩圖案設計[J].應用科學學報,2012,30(6):624-628.JIA Qi,LYU Xu-liang,WU Chao,et al.Application of Markov random field and pyramid structure in the design of digital pattern painting[J].Journal of Applied Sciences–Electronics and Information Engineering,2012,30(6):624-628.(in Chinese)
[6]盧軍,李楊,趙康健,等.基于主色共生矩陣法的數碼迷彩紋理特征提取[J].計算機工程,2011,37(7):246-248.LU Jun,LI Yang,ZHAO Kang-jian,et al.Digital camouflage texture feature extraction based on dominant colors and co-occrrence matrix[J].Computer Engineering,2011,37(7):246-248.(in Chinese)
[7]張勇,蔣曉軍,張栓勤,等.外軍分形迷彩設計技術研究 [J].工兵裝備研究,2014,33(2):60-64.ZHANG Yong,JIANG Xiao-jun,ZHANG Shuan-qin,et al.Fractal camouflage pattern design in foreign army[J].Engineer E-quipment Research,2014,33(2):60-64.(in Chinese)
[8]王瓊華.3D顯示技術與器件 [M].北京:科學出版社,2011: 18-23.WANG Qiong-hua.3D display technique and device[M].Beijing:Science Press,2011:18-23.(in Chinese)
[9]田學禮.現代立體印刷工藝學 [M].武漢:武漢大學出版社,2007:206-208.TIAN Xue-li.Modern stereoscopic printing technology[M].Wuhan:Wuhan University Press,2007:206-208.(in Chinese)
[10]Ishizuka S,Mukai T,Kakeya H.Viewing zone of an autostereoscopic display with a directional backlight using a convex lens array[J].Journal of Electronic Imaging,2014,23(1):01102.
[11]段鳳云,張俊利,陳世明.立體成像微觀過程的理論分析和實驗驗證[J].南開大學學報(自然科學),2000,33(2):85-87.DUAN Feng-yun,ZHANG Jun-li,CHEN Shi-ming.Theoretical analysis and experimental verification about micro-process in stereoscopic imaging[J].Acta Scientiarum Naturalium Universitatis Nankaiensis,2000,33(2):85-87.(in Chinese)
[12]張俊利,陳世明,段鳳云.柱鏡板再現三維圖像的研究 [J].現代顯示,2000(1):16-19.ZHANG Jun-li,CHEN Shi-ming,DUAN Feng-yun.Study the stereoscopic imaging reappearing by lenticular screen[J].Advanced Display,2000(1):16-19.(in Chinese)
[13]黃敏,劉浩學.立體印刷制作工藝光柵板參數的選擇 [J].北京印刷學院學報,2005,13(1):9-12.HUANG Min,LIU Hao-xue.Selecting of the parameters of cylindrical lens sheet imaging in 3D printing[J].Journal of Beijing Institute of Graphic Communication,2005,13(1):9-12.(in Chinese)
[14]安連生.應用光學[M].第3版.北京:北京理工大學出版社,2009:49-52.AN Lian-sheng.Applied optics[M].3rd edition.Beijing:Beijing Institute of Technology Press,2009:49-52.(in Chinese)
Research on 3D Dynamic Imaging Algorithm for Digital Camouflage
WU Guo-jing,LYU Xu-liang,XU Wei-dong,LI Ling,WENG Xiao-di
(Engineering Institute of Engineer Corps,PLA University of Science and Technology,Nanjing 210007,Jiangsu,China)
The current digital camouflage is not able to withstand the future high-tech reconnaissance and monitoring due to its planarity and inalterability.To address the issue,a 3D dynamic imaging algorithm based on lenticular raster is proposed.The proposed algorithm fully takes the biological characteristics of human binocular stereo imaging and the optical characteristics of splitting light and imaging of lenticular raster into account to describe the feasibility of 3D dynamic digital camouflage.On this basis,the parallax design principle of 3D dynamic imaging for digital camouflage is deduced,and the multiple sequence diagrams are generated according to depth information of background.The comb function is used to sample and synthesize the sequence diagrams.The resultant raster image could be mounted on the back of a grating plate to achieve 3D dynamic imaging.The simulation results show that the proposed algorithm can be used for the 3D dynamic imaging of digital camouflage.
ordanace science and technology;camouflage;digital camouflage;3D dynamic imaging; lenticular raster;parallax
E951.4
A
1000-1093(2016)01-0103-06
2015-06-16
武國晶(1984—),女,博士研究生。E-mail:returnwgj@163.com;呂緒良(1957—),男,教授,博士生導師。E-mail:xllu1957@126.com
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
