基于新型擾動(dòng)觀測(cè)器的永磁同步電機(jī)滑模控制
2016-11-09 11:02:49白天明
電機(jī)與控制應(yīng)用 2016年9期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
白天明
(遼寧機(jī)電職業(yè)技術(shù)學(xué)院,遼寧 丹東 118001)
?
基于新型擾動(dòng)觀測(cè)器的永磁同步電機(jī)滑模控制
白天明
(遼寧機(jī)電職業(yè)技術(shù)學(xué)院,遼寧 丹東118001)
為了提高永磁同步電機(jī)(PMSM)調(diào)速系統(tǒng)的控制性能,提出了一種基于新型擾動(dòng)觀測(cè)器的滑模速度控制器。建立了包含參數(shù)不確定性及負(fù)載擾動(dòng)的PMSM數(shù)學(xué)模型。為了減少擾動(dòng)量的影響,設(shè)計(jì)了一種新型擾動(dòng)觀測(cè)器,并以此得到的觀測(cè)值作為前饋量補(bǔ)償?shù)交?刂破鞯妮斎攵恕7抡婕霸囼?yàn)結(jié)果表明,與傳統(tǒng)PI控制器相比,該算法提高了系統(tǒng)的魯棒性和動(dòng)態(tài)響應(yīng)速度。
永磁同步電機(jī); PI控制; 滑模控制; 擾動(dòng)觀測(cè)器
0 引 言
隨著生產(chǎn)技術(shù)的不斷發(fā)展,人們對(duì)電機(jī)調(diào)速系統(tǒng)的調(diào)速范圍、動(dòng)靜態(tài)性能等都提出了更高的要求。永磁同步電機(jī)(Permanent Magnet Synchronous Motor, PMSM)由于具有結(jié)構(gòu)設(shè)計(jì)簡(jiǎn)單、運(yùn)行效率高、功率密度高等優(yōu)點(diǎn),在軍事和民用等領(lǐng)域得到了廣泛的應(yīng)用[1-2]。目前,關(guān)于PMSM調(diào)速系統(tǒng)的控制策略大多仍然采用傳統(tǒng)的PI控制器,主要是因?yàn)樵摽刂破骶哂薪Y(jié)構(gòu)簡(jiǎn)單且參數(shù)便于調(diào)節(jié)等諸多優(yōu)點(diǎn),在電氣傳動(dòng)系統(tǒng)中得到了廣泛應(yīng)用。交流異步電機(jī)系統(tǒng)本身是一個(gè)比較復(fù)雜的非線性系統(tǒng),為了便于控制器的設(shè)計(jì),對(duì)電機(jī)的數(shù)學(xué)模型進(jìn)行了簡(jiǎn)化處理。但是,當(dāng)電機(jī)長(zhǎng)時(shí)間運(yùn)行或者受到外界擾動(dòng)的影響時(shí),電機(jī)的參數(shù)都會(huì)發(fā)生一定的變化,因此基于此簡(jiǎn)化模型得到的PI控制器參數(shù)并不能滿足電機(jī)高性能控制的要求[3- 4]。
為了解決傳統(tǒng)PI控制存在的缺點(diǎn),隨著現(xiàn)代控制技術(shù)的發(fā)展,一些先進(jìn)的控制算法逐步被應(yīng)用于PMSM調(diào)速系統(tǒng)。滑模控制(Sliding-Mode Control, SMC)由于其控制器設(shè)計(jì)簡(jiǎn)單、魯棒性強(qiáng)等優(yōu)點(diǎn)而被廣泛應(yīng)用[5-13]。但是,SMC對(duì)外界擾動(dòng)和參數(shù)變化的抑制是通過設(shè)置較大的切換增益來實(shí)現(xiàn)的。切換增益的大小直接決定SMC算法的動(dòng)態(tài)性能,但是較大的增益在提高系統(tǒng)收斂速度的同時(shí),也會(huì)帶來系統(tǒng)的抖振問題。另外,基于趨近律方法的傳統(tǒng)滑模控制器設(shè)計(jì)方法仍然采用傳統(tǒng)的趨近律方法,系統(tǒng)抖振現(xiàn)象比較嚴(yán)重。
為了解決上述問題,本文將PMSM在運(yùn)行過程中參數(shù)的變化、參數(shù)的不確定性和突加負(fù)載擾動(dòng)等效為總的擾動(dòng)量,設(shè)計(jì)一種新型擾動(dòng)觀測(cè)器來觀測(cè)系統(tǒng)中存在的干擾量,并用此觀測(cè)值作為前饋量補(bǔ)償?shù)交?刂破鞯妮斎攵耍瑥亩岢隽艘环N帶有擾動(dòng)觀測(cè)器的滑模控制策略。最后仿真和試驗(yàn)結(jié)果都驗(yàn)證了該算法具有較好的動(dòng)靜態(tài)性能,證明了該算法的有效性和可行性。
1 PMSM的數(shù)學(xué)模型
建立d-q坐標(biāo)系下表貼式PMSM的數(shù)學(xué)模型為[14-15]
(1)
式中:ud、uq,id、iq——分別為定子電壓和電流;
R——定子電阻;
Ls——定子電感;
pn——電機(jī)的極對(duì)數(shù);
ω——機(jī)械角速度;
ψf——磁鏈;
J——轉(zhuǎn)動(dòng)慣量;
TL——負(fù)載轉(zhuǎn)矩;
Te——電磁轉(zhuǎn)矩。
由于表貼式PMSM設(shè)計(jì)結(jié)構(gòu)的特殊性,所以采用id=0的控制策略即可獲得較好的控制效果。此時(shí)式(1)可簡(jiǎn)化為
(2)
為了便于控制器的設(shè)計(jì),定義PMSM系統(tǒng)的狀態(tài)變量:
(3)
式中:ωref——參考轉(zhuǎn)速,并假定ωref存在二階導(dǎo)數(shù)。
根據(jù)式(2)和式(3)可知:
(4)
當(dāng)考慮電機(jī)的參數(shù)存在變化時(shí),式(4)可表示為
(5)
式中: Δa,Δb,Δc——分別為對(duì)應(yīng)項(xiàng)的不確定因素,且有界。
設(shè)g(t)為總的不確定量:
(6)

將式(6)和式(5)代入到式(3),可得系統(tǒng)的數(shù)學(xué)模型:
(7)

2 基于干擾觀測(cè)器的滑模控制器設(shè)計(jì)
2.1滑模速度控制器設(shè)計(jì)
為了便于速度控制器的設(shè)計(jì),首先定義滑模面函數(shù)為
s=cx1+x2
(8)
式中:c>0為設(shè)計(jì)參數(shù)。
根據(jù)SMC的基本原理,傳統(tǒng)的滑模控制器可設(shè)計(jì)為
u=ueq+uvs
(9)

uvs——切換控制,實(shí)現(xiàn)對(duì)參數(shù)變化和外界擾動(dòng)的魯棒控制。
則式(9)可滿足:
(10)
為了分析如式(10)所示控制器的穩(wěn)定性,定義Lyapunov函數(shù)為
(11)
對(duì)式(11)求導(dǎo),并將式(8)和式(10)代入式(11)可得


(12)

2.2新型擾動(dòng)觀測(cè)器設(shè)計(jì)
為了進(jìn)一步改善控制器的控制性能,消除擾動(dòng)量對(duì)控制系統(tǒng)的影響,提出一種新的滑模控制器為
(13)

擾動(dòng)觀測(cè)器設(shè)計(jì)為
(14)

為了分析如式(14)所示控制器的穩(wěn)定性,定義Lyapunov函數(shù)為
(15)

對(duì)V求導(dǎo),并將式(14)代入得


(16)

(17)
根據(jù)式(13)可求得滑模速度控制器的輸出,即q軸的參考電流量為

(18)
從式(18)可以看出,由于積分器的作用,進(jìn)一步削弱了抖振現(xiàn)象,提高了系統(tǒng)的動(dòng)態(tài)品質(zhì)。
3 仿真及試驗(yàn)結(jié)果分析
采用如圖1所示的PMSM調(diào)速控制系統(tǒng)進(jìn)行仿真與試驗(yàn)驗(yàn)證。
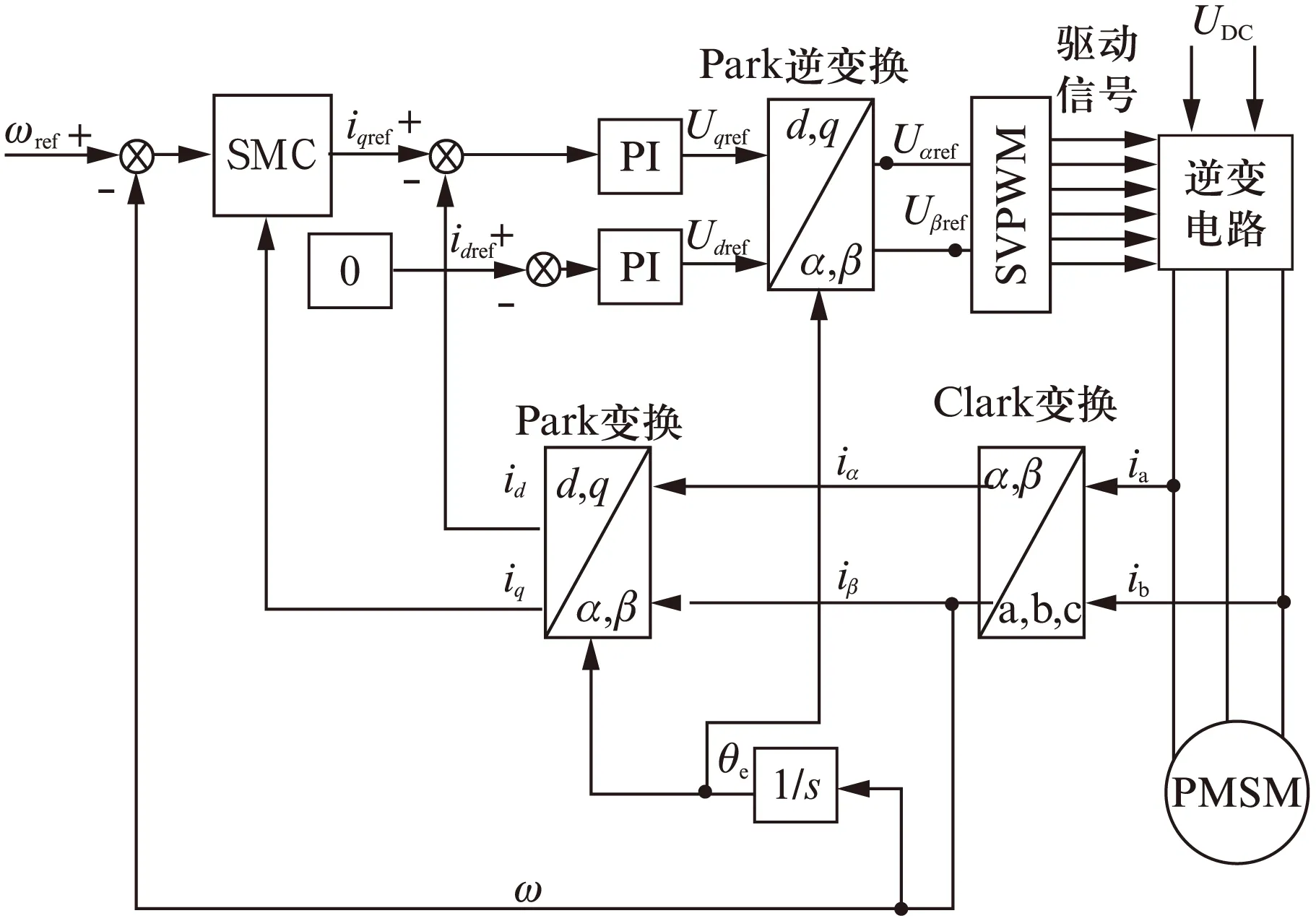
圖1 PMSM調(diào)速系統(tǒng)控制框圖
為了驗(yàn)證文中所提控制算法的有效性,首先在MATLAB/Simulink環(huán)境搭建系統(tǒng)的仿真模型,電機(jī)的具體參數(shù)如下: 定子電阻R=2.46Ω,定子電感Ls=6.35mH,永磁磁鏈ψf=0.175Wb,轉(zhuǎn)動(dòng)慣量J=1.02kg·m2,摩擦因數(shù)B=0.0001N·m·s,永磁磁鏈ψf=0.175Wb,極對(duì)數(shù)pn=4。其中,仿真條件設(shè)置為參考轉(zhuǎn)速500r/min,在t=0.5s時(shí)刻突加負(fù)載轉(zhuǎn)矩TL=50N·m。
為了便于比較分析,圖2和圖3分別給出了采用PI控制器和文中所提滑模速度控制器的仿真結(jié)果。其中,圖2(a)和圖3(a)分別給出了當(dāng)突加負(fù)載時(shí)兩種控制算法下的轉(zhuǎn)速變化曲線;圖2(b)、圖2(c)和圖3(b)、圖3(c)分別給出了突加負(fù)載時(shí)電磁轉(zhuǎn)矩和三相電流的響應(yīng)曲線。

圖2 基于PI速度控制器的仿真結(jié)果
圖4和圖5給出了采用圖1所示的PMSM調(diào)速系統(tǒng)控制框圖的試驗(yàn)結(jié)果。其中參考轉(zhuǎn)速設(shè)定為500r/min,系統(tǒng)穩(wěn)態(tài)運(yùn)行后突加負(fù)載情況下的轉(zhuǎn)速響應(yīng)如圖4(a)和圖5(a)所示,系統(tǒng)穩(wěn)定后突加負(fù)載時(shí)的轉(zhuǎn)矩響應(yīng)如圖4(b)和圖5(b)所示。
從以上仿真及試驗(yàn)結(jié)果可知: 采用PI速度控制器時(shí),系統(tǒng)轉(zhuǎn)速、電磁轉(zhuǎn)矩均有較明顯的波動(dòng),當(dāng)施加外界擾動(dòng)時(shí),恢復(fù)到原有轉(zhuǎn)速需要一定的調(diào)節(jié)時(shí)間,且存在穩(wěn)態(tài)誤差;而采用新設(shè)計(jì)的滑模速度控制器控制時(shí),系統(tǒng)轉(zhuǎn)速、轉(zhuǎn)矩具有較好的動(dòng)態(tài)性能,轉(zhuǎn)速波動(dòng)小,調(diào)節(jié)時(shí)間較短,抗外界擾動(dòng)能力強(qiáng),魯棒性好,驗(yàn)證了該算法的可行性和有效性。

圖3 基于滑模速度控制器的仿真結(jié)果
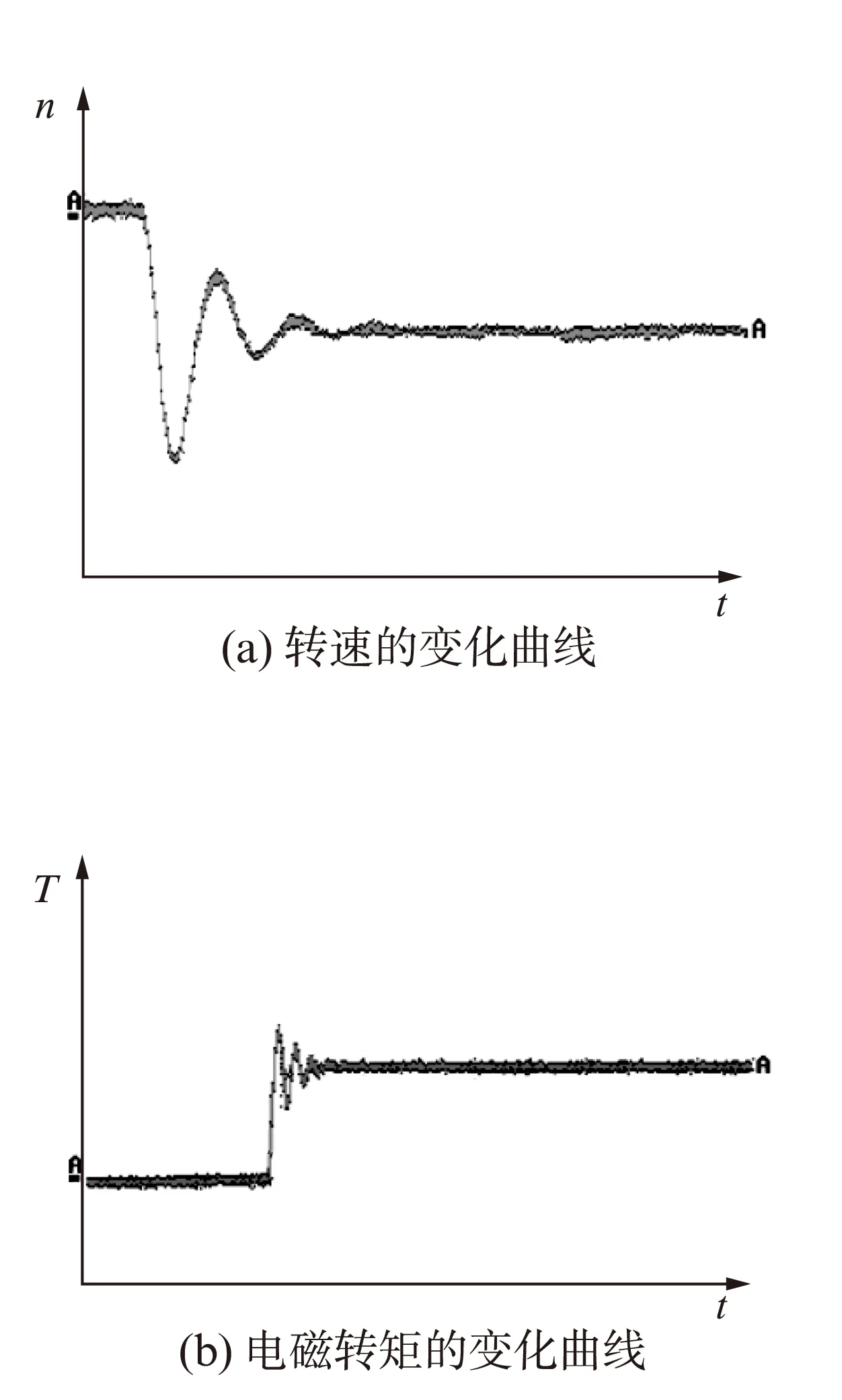
圖4 基于PI速度控制器的試驗(yàn)結(jié)果

圖5 基于滑模速度控制器的試驗(yàn)結(jié)果
4 結(jié) 語
為了提高PMSM調(diào)速系統(tǒng)的動(dòng)態(tài)性能,本文提出了一種基于擾動(dòng)觀測(cè)器的滑模速度控制策略。在滑模控制器的基礎(chǔ)上,同時(shí)為了減少擾動(dòng)量的影響,設(shè)計(jì)了一種新型擾動(dòng)觀測(cè)器,并以此得到的觀測(cè)值作為前饋量補(bǔ)償?shù)交?刂破鞯妮斎攵恕Mㄟ^與傳統(tǒng)PI控制器進(jìn)行比較,仿真及試驗(yàn)結(jié)果驗(yàn)證了該算法的可行性和有效性。
[1]袁雷,沈建清,肖飛,等.插入式永磁低速同步電機(jī)非奇異終端滑模觀測(cè)器設(shè)計(jì)[J].物理學(xué)報(bào),2013,62(3): 37- 45.
[2]楊書生,鐘宜生.永磁同步電機(jī)轉(zhuǎn)速伺服系統(tǒng)魯棒控制器設(shè)計(jì)[J].中國電機(jī)工程學(xué)報(bào),2009,29(3): 84-89.
[3]NEE H P. Determination of d and q reactance of permanent-magnet synchronous motors without measurements of the rotor position[J]. IEEE Trans on Industry Applications, 2000,36(5): 1330-1334.
[4]楊書生,鐘宜生.永磁同步電機(jī)轉(zhuǎn)速伺服系統(tǒng)魯棒控制器設(shè)計(jì)[J].中國電機(jī)工程學(xué)報(bào),2009,29(3): 84-89.
[5]王輝,萬里瑞,王才東.基于智能滑模控制的永磁直線同步電機(jī)調(diào)速系統(tǒng)[J].電機(jī)與控制應(yīng)用,2014,41(2): 6-10.
[6]楊代利,張宏立.基于全魯棒滑模控制的永磁同步電機(jī)伺服系統(tǒng)矢量控制[J].電機(jī)與控制應(yīng)用,2014,41(2): 19-22.
[7]蘇良昱.基于PCHD模型和滑模控制的表貼式永磁同步電機(jī)控制系統(tǒng)設(shè)計(jì)[J].電機(jī)與控制應(yīng)用,2015,42(8): 39-43.
[8]錢榮榮,駱敏舟,趙江海,等.永磁同步電動(dòng)機(jī)新型自適應(yīng)滑模控制[J].控制理論與應(yīng)用,2013,30(13): 1414-1421.
[9]常雪劍,劉凌,崔榮鑫.永磁同步電機(jī)非奇異快速終端可變邊界層滑模控制[J].西安交通大學(xué)學(xué)報(bào),2015,49(6): 53-59.
[10]盧濤,于海生,山炳強(qiáng),等.永磁同步電機(jī)伺服系統(tǒng)的自適應(yīng)滑模最大轉(zhuǎn)矩/電流控制[J].控制理論與應(yīng)用,2015,32(2): 251-255.
[11]張曉光,趙克,孫力,等.永磁同步電動(dòng)機(jī)滑模變結(jié)構(gòu)調(diào)速系統(tǒng)新型趨近率控制[J].中國電機(jī)工程學(xué)報(bào),2011,31(24): 77-82.
[12]李政,胡廣大,崔家瑞,等.永磁同步電機(jī)調(diào)速系統(tǒng)的積分型滑模變結(jié)構(gòu)控制[J].中國電機(jī)工程學(xué)報(bào),2014,34(3): 431- 437.
[13]汪海波,周波,方斯琛.永磁同步電機(jī)調(diào)速系統(tǒng)的滑模控制[J].電工技術(shù)學(xué)報(bào),2009,24(9): 71-77.
[14]GHAFARI-KASHANI A R, FAIZ J, YAZDANPANAH M J. Integration of non-linearH∞and sliding mode control techniques for motion control of a permanent magnet synchronous motor[J]. IET Electric Power Applications, 2010,4(4): 267-280.
[15]LEE J H, ALLAIRE P E, GANG T, et al. Integral sliding-mode control of a magnetically suspended balance beam: analysis simulation, and experiment[J]. IEEE/ASME Transactions on Mechatronics, 2001,6(3): 338-340.
Sliding Mode Control for Permanent Magnet Synchronous Motor Based on Novel Disturbance Observer
BAITianming
(Liaoning Mechatronics College, Dandong 118001, China)
A siding mode control(SMC) strategy with a novel disturbance observer was proposed for permanent magnet synchronous motor(PMSM). The mathematical model of PMSM composed of parameters uncertainty and disturbance was established, in order to estimate the disturbance caused by model parameters variation and load change, a novel disturbance observer was employed, and then this estimated value was used to construct a feed-forward compensation which was added to SMC input. All results showed that the arithmetic has the advantages of faster response, less stabilization error compared to traditional PI controller.
permanent magnet synchronous motor(PMSM); PI controller; sliding mode control(SMC); disturbance observer
白天明(1978—),男,碩士研究生,高級(jí)工程師,研究方向?yàn)橹悄軆x表、測(cè)控技術(shù)。
TM 351
A
1673-6540(2016)09- 0020- 05
2016-03-28
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17