重力輔助導航仿真及適配性分析
2016-11-11 05:13:12王艷杰王虎彪
測繪通報 2016年10期
王艷杰,王虎彪,王 勇
(1. 中國科學院測量與地球物理研究所大地測量與地球動力學國家重點實驗室,湖北 武漢 430077; 2. 中國科學院大學,北京 100049)
?
重力輔助導航仿真及適配性分析
王艷杰1,2,王虎彪1,王勇1
(1. 中國科學院測量與地球物理研究所大地測量與地球動力學國家重點實驗室,湖北 武漢 430077; 2. 中國科學院大學,北京 100049)
重力場輔助導航是抑制慣性導航系統隨時間誤差累積的有效方法之一。本文引入重力異常可導航值作為描述重力異常背景場的特征之一,并計算了西太平洋海域1′×1′重力異常可導航值。為了分析重力異常背景場的適配性,選取了4條代表性航線并基于ICCP算法進行了仿真,并對仿真結果作了統計分析。統計結果表明,匹配區域的可導航值越大,適配性能越好,其中在可導航值均值大于20的航線上,匹配成功率大于80%,且匹配精度優于2 nmile。
重力輔助導航;可導航值;ICCP算法;適配性;匹配精度
目前水下運載體的導航主要采用慣性導航系統,慣性導航系統具有自主性好、隱蔽性強、全天候工作、能為運載體提供連續實時的導航參數等優點,但是慣性導航系統存在導航誤差隨時間積累、長期穩定性差等固有弱點[1],利用重力場匹配輔助慣性導航是解決這一問題的有效方法之一。重力輔助導航的原理就是當運載體經過匹配區域時,慣性導航系統會給出一系列的航跡點,根據這些航跡點可以在背景數據庫中找到相應的指示重力異常值,同時運載體上的重力傳感器會實時測量重力場數據,通過相應處理可以得到實測的重力異常值,將指示值和實測值通過一定的算法進行匹配就可以得到運載體精確的位置信息[2-3]。在20世紀80年代初國外就開始對重力輔助導航技術進行研究,其中比較有代表性的是美國洛克希德-馬丁公司研制的通用重力模塊組成的重力輔助導航系統(NGS)和貝爾公司研制的重力輔助導航系統(GAINS)[4-5]。與國外相比,國內開始重力輔助導航研究始于20世紀初,目前還處于理論探索和仿真研究階段[6-7]。重力輔助導航系統通常由慣性導航系統、重力背景場數據庫、重力傳感器、計算機和匹配算法組成[7]。在重力輔助導航系統各部分達到最優條件下,匹配區域的選擇至關重要,為了分析重力異常背景場的適配性,基于西太平洋1′×1′重力異常背景數據庫,計算了該區域的重力異常場可導航值,基于ICCP算法仿真設計了不同特征區域的航線,并分析了可導航值與背景場適配性的關系,這為提高匹配成功率和匹配精度提供了重要的參考依據。
一、ICCP匹配算法
ICCP(iterative closest contour point)算法即迭代最近點等值線法,最初來源于圖像配準的ICP(iterative closest point)算法,通過反復進行剛性變換(旋轉和平移)來減小匹配對象和目標對象之間的距離,以達到匹配定位的目的[2,8-9]。ICCP算法原理如圖1所示,載體在航行過程中慣性導航系統給出的一系列指示軌跡由Pi(i=0,1,2,…,N)點表示,N表示采樣點個數,真實點航跡由Xi(i=0,1,2,…,N)點表示,由Ci(i=0,1,2,…,N)構成的彎曲虛線表示重力傳感器測量的重力異常在背景數據庫上的等值線,由Yi(i=0,1,2,…,N)點構成的虛線表示經過一次剛性變換之后得到的匹配軌跡,Qi(i=0,1,2,…,N)點表示慣性導航系統指示點Pi在等值線上對應的最近點。ICCP算法在運算過程中,指示軌跡Pi會逐漸接近真實軌跡Xi,當兩者之間的距離滿足一定的要求時,ICCP算法就會停止迭代,輸出匹配結果。
二、重力異常可導航值
重力異常背景場適配性就是地球重力場特征在相關匹配中表征地理位置的能力[1,10]。通過對重力場適配性進行分析,選擇那些重力場特征明顯、信息豐富、適應性強的區域作為匹配區域,可以有效提高重力匹配導航的實時性和精確性。目前,描述地球重力異常背景場特征的參數有很多,如標準差、絕對粗糙度、信息熵、相關系數等[1,11-12]。文獻[12]從最小匹配方差和的原理出發,設計了重力垂直梯度可導航值計算方法,把可導航值作為背景場的特征參數之一,并以基于卡爾曼濾波原理的SITAN算法作了仿真研究。本文參照重力垂直梯度可導航值計算方法,計算了西太平洋1′×1′重力異常可導航值,計算結果如圖2所示。
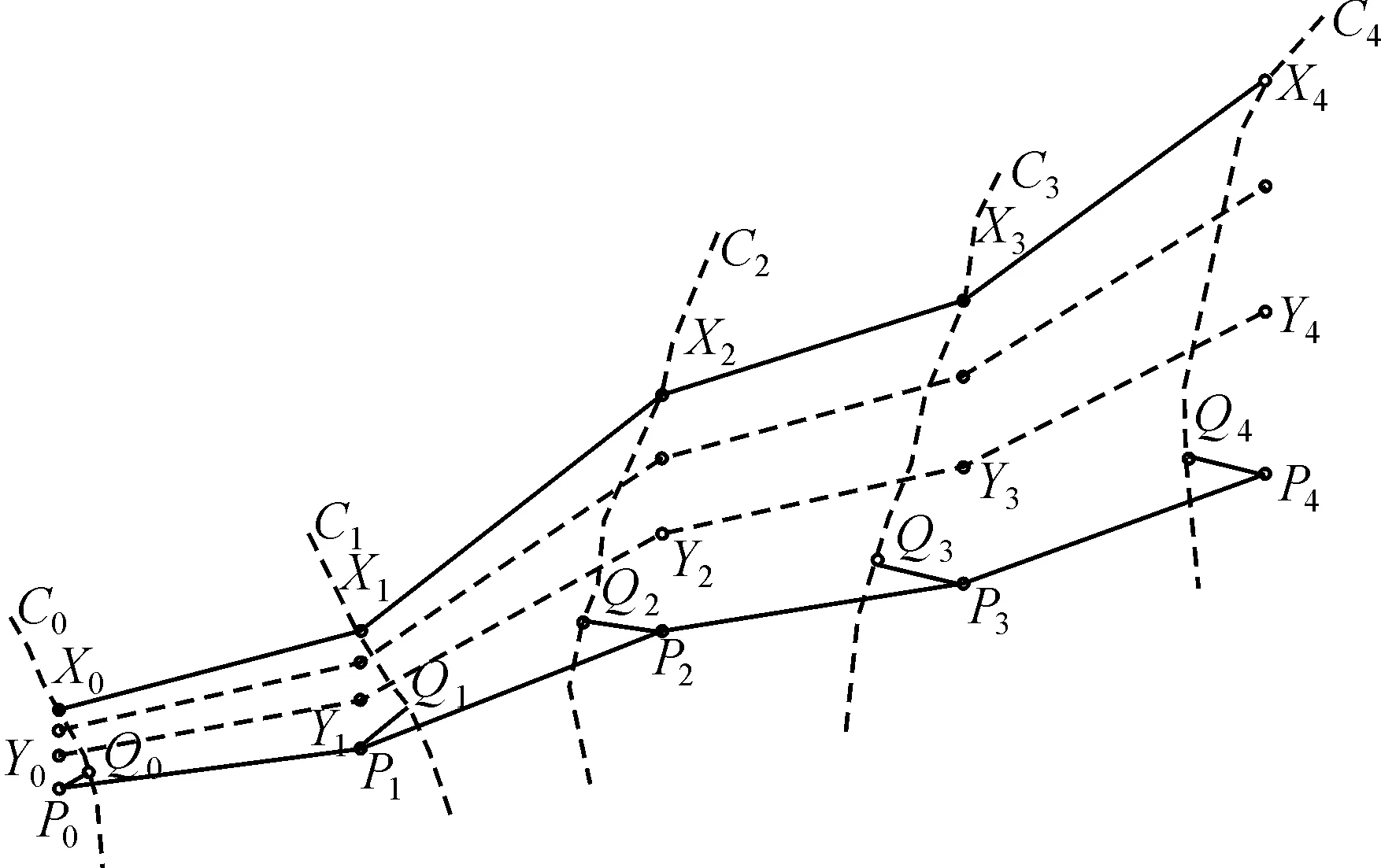
圖1 ICCP算法原理
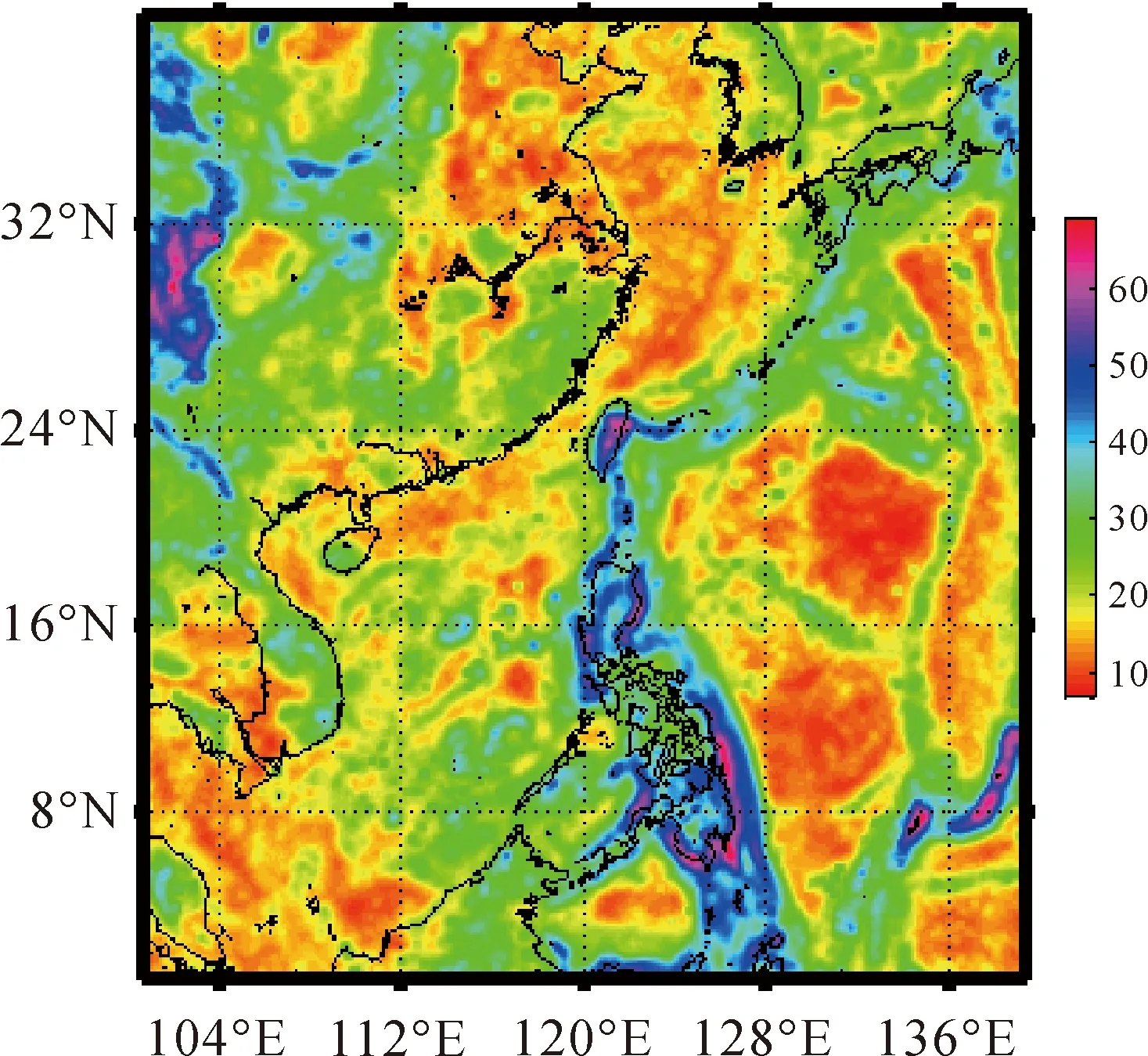
圖2 重力異常可導航值分布
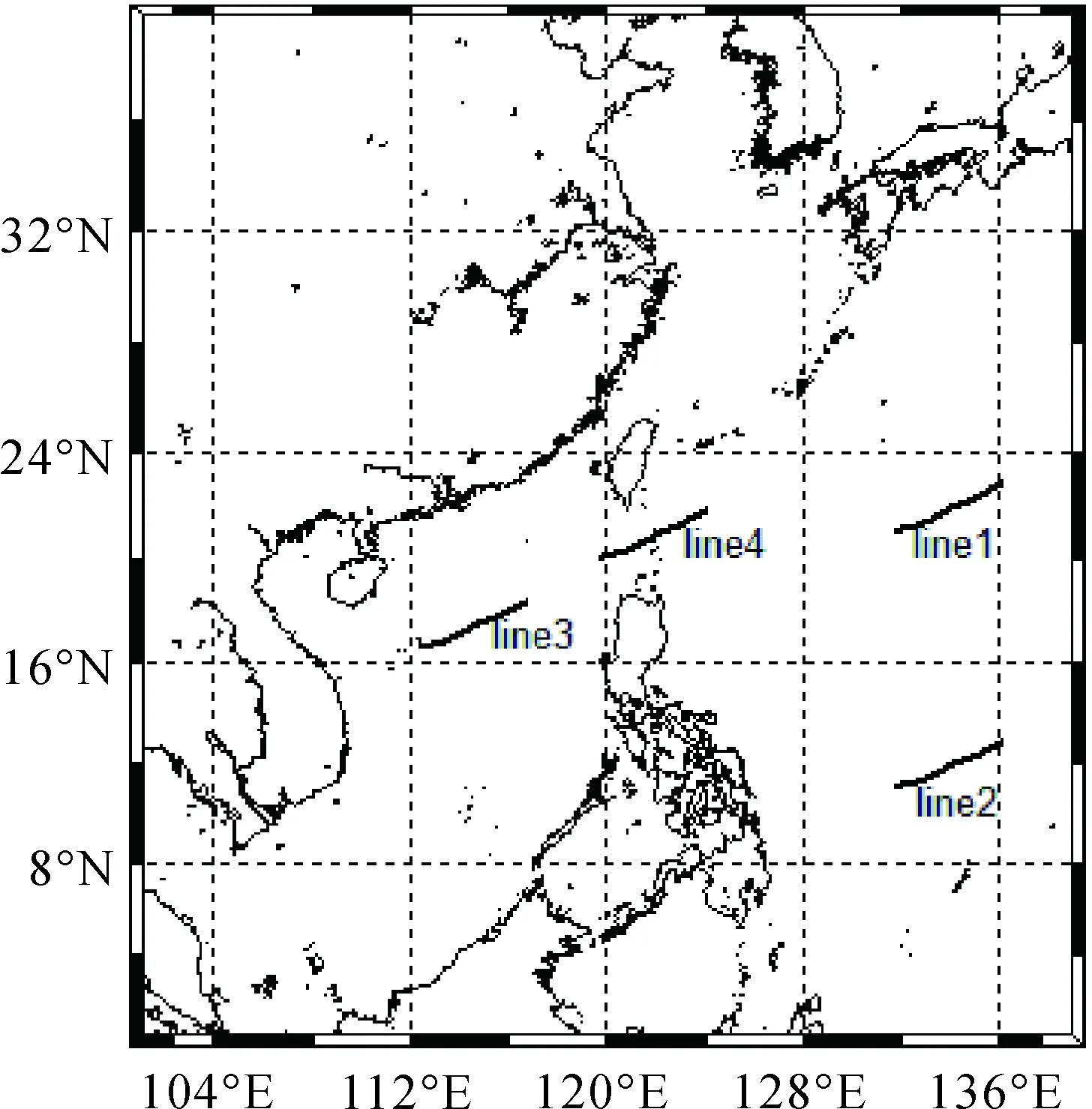
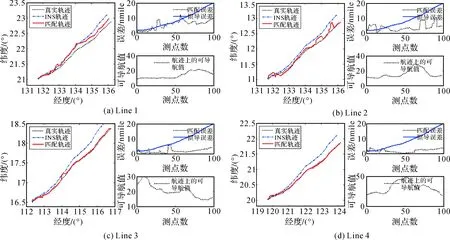
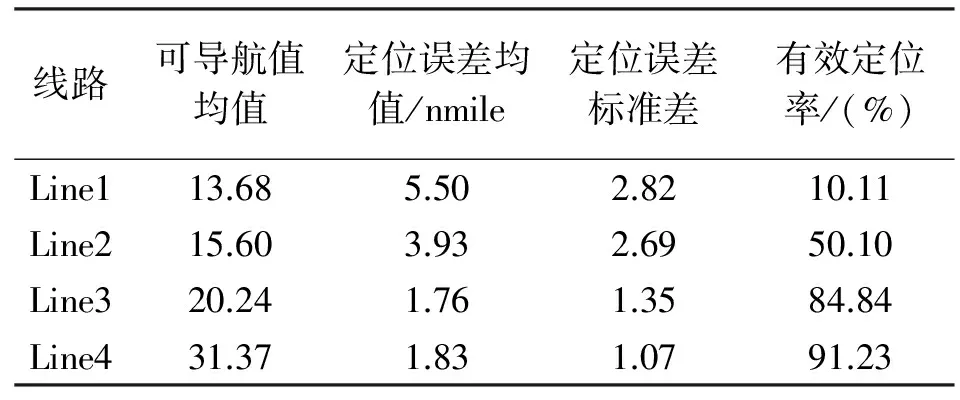
可導航值采用移動局部窗口計算方法,取大小為m×n的格網為局部窗口W,在局部窗口W中取格網數大小為k×k(k hi=f(Wj,Wc)= i=(1,2,…,(m-k)×(n-k)) (1) hmin=minhii=(1,2,…,(m-k)×(n-k)) (2) (3) 本次試驗中取m=n=79,k=23。 適配性的評價指標有匹配概率、匹配精度、匹配誤差、匹配時間、截獲概率、虛警概率、圓概率偏差、有效定位率等[1,12-13],本研究采用匹配精度和有效定位率作為評價適配性的指標。為了分析背景場的適配性,仿真試驗選取了西太平洋海域4條不同的航線,航線分布如圖3所示。4條仿真路線除了所在位置不同外,其他外界條件都是相同的,每條航線由100個采樣點組成,采樣時間間隔為90s。仿真所使用的數據庫是由衛星測高和船測重力聯合解算的分辨率1′×1′(1′≈1nmile=1852m)的格網型數據,經度范圍為100°—140°,緯度范圍為0°—40°。實測重力數據是根據真實航跡點在重力異常數據庫提取得到,并加入了方差為1mGal2的白噪聲。慣導系統指示軌跡初始誤差為1.59nmile,經過100個采樣點后誤差累積到20nmile。4條航線的匹配結果如圖4所示,統計結果見表1。 圖3 仿真線路分布 由圖3和表1可以看出,可導航值能夠很好地反映出背景場的適配性,航跡上的可導航值越大,匹配定位精度越高、有效定位率越高,即適配性越好。圖4中Line3和Line4的可導航值均值在20以上,匹配結果也比較理想,匹配精度優于2 nmile,在Line4中,當重力異常可導航值達到50時,匹配結果已經基本接近真實值。Line1和Line2航跡上的可導航值均值低于16,其有效定位率和定位精度明顯低于Line3和Line4,而且出現了一定數量的誤匹配點。特別是Line1整條航線的匹配幾乎失敗,Line2中也出現了兩段起伏較大的匹配航線。可導航值小表明重力異常變化不明顯,匹配過程容易受到干擾,誤匹配出現的幾率也會增加。 圖4 4條航線仿真結果 線路可導航值均值定位誤差均值/nmile定位誤差標準差有效定位率/(%)Line113.685.502.8210.11Line215.603.932.6950.10Line320.241.761.3584.84Line431.371.831.0791.23 本文采用移動局部窗口計算方法計算了西太平洋海域的可導航值,并基于ICCP算法選取了4條代表性航線進行仿真。仿真結果表明,匹配區域的適配性和匹配區域的可導航值大小有一定的相關性,即可導航值越大的區域適配性越強,匹配算法能夠顯著地抑制慣導誤差隨時間的積累,在重力異常可導航值均值大于20的航線上,有效匹配率大于80%,匹配結果的精度優于2 nmile。重力異常可導航值可以作為航跡規劃及匹配區域選擇的一個重要參考依據。 [1]胡小平,吳美平.水下地磁導航技術[M].北京:國防工業出版社,2013:6-11. [2]張紅梅,趙建虎,楊琨,等.水下導航定位技術[M].武漢:武漢大學出版社,2010:94-100. [3]BISHOPG C. Gravitational Field Maps and Navigational Errors[J].IEEE Journal of Oceanic Engineering,2002,27(3):726-737. [4]奔粵陽,楊曉龍,李倩,等.重力輔助阻尼捷聯慣性導航系統[J].儀器儀表學報,2014,35(7):1482-1488. [5]WANG Hubiao,WU Lin,CHAI Hua,et al.Technology of Gravity Aided Inertial Navigation System and Its Trial in South China Sea[J].Let Radar Sonar Navigtion,2015,10(5):862-869. [6]王躍剛,文超斌,郭志斌,等.一種新的基于R-D分析的重力匹配輔助導航算法[J].地球物理學報,2014,57(5):1424-1432. [7]王虎彪,王勇,方劍,等.“最小均方誤差旋轉擬合法”重力輔助導航仿真研究[J].中國科學(地球科學),2012,42(7):1055-1032. [8]趙建虎,張紅梅,王愛學,等.利用ICCP的水下地磁匹配導航算法[J].武漢大學學報(信息科學版),2010,35(3):261-264. [9]王志剛,邊少鋒.基于ICCP算法的重力輔助慣性導航[J].測繪學報,2008,37(2):147-151. [10]王哲,王仕成,張金生,等.一種地磁匹配制導適配性特征參數選取方法[J].宇航學報,2009,30(3):1057-1063. [11]鄭彤,蔡龍飛,王志剛,等.地形匹配輔助導航中匹配區域的選擇[J].中國慣性技術學報,2009,17(2):191-196. [12]王虎彪,王勇,許大欣,等.重力垂直梯度導航值特征分布與可導航性分析[J].測繪學報,2010,39(4):.364-369. [13]郭文普,孫繼銀,何芳芳,等.基于數據庫的景象匹配適應性分析平臺[J].紅外與激光工程,2006,35(6):738-74. Analysis of Gravity Aided Navigation Simulation and Matching Suitability WANG Yanjie,WANG Hubiao,WANG Yong 王艷杰,王虎彪,王勇.析[J].測繪通報,2016(10):58-60.DOI:10.13474/j.cnki.11-2246.2016.0329. 2015-12-17 國家自然科學基金(41374086;41274084) 王艷杰(1989—),男,碩士生,研究方向為重力輔助導航。E-mail:wyjwhigg@163.com P22 B 0494-0911(2016)10-0058-03三、仿真試驗與適配性分析
四、結束語
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
