Kalman濾波在導航中的應用研究Applications of Kalman Filter in the Navigation
2016-11-12 05:44:13洪騰騰胡紹林
自動化博覽 2016年3期
洪騰騰,胡紹林,2
(1.西安理工大學自動化與信息工程學院,陜西 西安 710048)
(2.航天器在軌故障診斷與維修重點實驗室,陜西 西安 710043)
Kalman濾波在導航中的應用研究
Applications of Kalman Filter in the Navigation
洪騰騰1,胡紹林1,2
(1.西安理工大學自動化與信息工程學院,陜西 西安 710048)
(2.航天器在軌故障診斷與維修重點實驗室,陜西 西安 710043)
隨著導航技術日新月異的發展,Kalman濾波技術在導航領域中的應用也隨處可見。本文圍繞Kalman濾波技術在導航過程中的應用問題,從技術途徑的幾個方面進行系統分析,簡要綜述Kalman濾波技術在慣性導航、衛星導航和組合導航等方面應用的發展現狀,并指出在導航領域應用Kalman濾波技術存在的若干技術難點,為改進和完善Kalman濾波技術在導航領域的應用提供了潛在的研究方向。
Kalman濾波;慣性導航;組合導航;擴展Kalman濾波;無跡Kalman濾波
1 引言
20世紀中葉,伴隨著電子技術和空間技術的發展,控制學科研究對象由一維的線性定常系統快速發展到多維非線性時變系統。R.E.Kalman等在上世紀60年代初提出可以用于時域上的狀態空間理論,并在此基礎上建立了基于狀態空間模型的最優狀態估計遞推算法,稱作Kalman濾波算法。基于系統狀態演化方程、觀測方程和白噪聲激勵的統計特性,形成的KF算法,突破了經典維納濾波理論和方法的局限性,避免了Wiener濾波在頻域內設計時遇到的制約,具有可以對非平穩多維隨機系統過程狀態進行實時估計等顯著優點,特別適合于動態處理過程,因而在過程控制、信號處理和導航制導等領域中有著廣泛的應用。
特別是在導航領域,譬如衛星導航,其基本的導航原理是基于運行在指定軌道的導航衛星。衛星導航在信號的傳遞過程中,不可避免地會有噪聲的干擾,電離層和對流層對信號傳播也會產生不可忽略的影響,采用KF算法在對信號進行濾波消除部分誤差的同時,解算出目標的位置。由于KF算法采用預測-實測-修正的遞推過程,可以使隨機干擾從系統的觀測數據中剔除,且不需要存貯大量觀測數據,另外該方法是動態處理,實時地被新的預測修正和預測。
本文主要對Kalman濾波在導航領域的慣性導航系統、衛星導航和組合導航系統的技術研究和發展現狀進行總結歸納。
2 KF在導航中應用現狀分析
工程界最先開始關注Kalman濾波理論,并將其應用到實際工程問題,使其在解決問題的過程中不斷發展和完善。麻省理工學院研制完成的阿波羅計劃中的導航系統就是一個成功的實例。KF算法早期應用中的另一成功實例為C-SA飛機的多模式導航系統。多年來,人們對KF的應用做了很多研究。本文主要就KF技術在導航技術途徑上的應用展開討論。
2.1 KF技術在慣性導航中的應用
所謂慣性導航,是指通過陀螺和加速度計等設備測量載體的角速率和角加速度信息,經積分運算得到載體的速度和位置信息,它是一種自主導航方式[1],不僅能實時輸出位置和速度等導航參數,而且能為運載體提供精確姿態信息基準。
KF很早就應用于慣性導航領域[2~4]。目前,其應用范圍主要集中在以下三個方面。
(1)KF處理慣性器件漂移誤差的應用
慣性導航系統的設備由于都安裝在運載體內,工作時不依賴外界信息,也不向外界輻射能量,不易受到干擾,所以在外界沒有給出參考信息的情況下也能提供導航信息。
文獻[5]中采用遞推算法的形式推導出了一種可以用系統的觀測矩陣和固定長的觀測序列來估計狀態的方法。這種方法的優點是:實時估計,不需要知道噪聲方差陣的先驗知識,其缺點是:算法的穩定性不高,估計精度低。除此之外,這種方法在數值穩定性方面還存在一些問題需要解決。文獻[6]提出了一種隨機時變偏差分離的方法,即在測量更新過程中,把偏差和狀態進行分開估計。這種KF算法不僅可大大減少計算量,而且避免了存在的數值病態問題。換句話來說,這種方法就是把系統需要估計的狀態分為兩部分,一部分是偏差狀態,另一部分是非偏差狀態,這種方法比較適于偏差狀態是隨機游走的隨機過程。文中的試驗結果也說明這種方法具有較高的精度。
(2)KF在初始對準技術上的應用
慣性導航系統初始對準的目的是在慣性導航系統工作前將平臺指向規定的導航坐標系。在初始對準中,使用KF算法取得了好的效果。文獻[7]將KF算法應用于捷聯慣性導航系統的靜基座初始對準。研究發現此算法可以得到比較穩定的收斂效果。
此外,在慣導系統初始對準問題中,隨著工程上對精度的要求日益提高,KF雖然可以從被噪聲污染的觀測值中實時地估計出系統的狀態,但是由于其計算量與系統的階數的三次方成正比,當系統的階次較高時,濾波器會失去實時性,所以單獨采用KF濾波器不能解決提高精度的問題。此時考慮到神經網絡不僅具有函數逼近的性能,而且具有實時性好的功能,用神經網絡代替KF,這種方法不僅不損失濾波的精度,而且還可以大大提高實時性。
利用擴展Kalman濾波(EKF)可解決非線性最優估計問題的原理,將基于EKF結合多層神經網絡實時學習算法,應用到神經網絡權值訓練過程中,可使得該網絡不僅具有普通神經網絡的自主學習能力、實時性好,而且具有EKF最優估計性能,由此可克服傳統算法收斂速度慢、對學習參數敏感、局部有極小值等缺點。
(3)KF在動基座傳遞對準技術上的應用
在現代慣性導航領域,因動基座傳遞對準精度和快速對準問題以及其工作環境的復雜性,對濾波算法提出了很高的要求,如何在對準精度和快速性方面取得更好的性能是目前慣性導航領域研究的重點。KF雖然已經在動基座傳遞對準方面進行了應用,但是由于載體自身機動誤差和干擾,特別是各種隨機的干擾使得在建模過程中比較困難,用KF濾波器不能滿足精度的要求,甚至會出現發散問題,所以需要進一步探討改進的新KF算法,以便能夠適應復雜多變的情況。文獻[8]采用了自適應KF方法。當外界環境變化和傳感器的測量噪聲都很大時,自適應KF算法具有更大的實用性。
2.2 KF在衛星導航中的應用
作為一種重要的最優估計理論,KF理論在衛星導航領域也得到了深入研究和廣泛應用[9]。在衛星導航系統定位中,由于衛星及用戶的運動或其他原因會引起衛星失鎖現象,然而不同歷元的觀測衛星是不可能完全相同的,所以組合觀測方程也會有所差異,這就可能導致新一輪濾波的開始。量測方程是非線性的,而常規的KF算法則是基于線形系統的濾波方法[10],通過對量測方程進行線性化,采用擴展EKF對其進行處理。
KF方法在導航定位求解中廣泛應用,研究學者對此進行了大量研究,提出了許多基于KF的導航定位求解方法。文獻[11]介紹了一種用于GPS導航的自適應模糊強跟蹤EKF方法和算法。此方法是利用求跡運算,但在可見衛星數較多時,計算量會比較大。上述求解方法較為復雜,且主要是針對提高求解定位精度來進行論述的,沒有考慮應用于動態實時求解的問題。
在導航定位求解方法中,設計將序貫處理與 KF濾波結合起來的方式,不僅可以使求解的精度提高,而且發揮了序貫處理方式可以提高求解速度、節約時間的特點。采用單個觀測量作為處理單元的序貫式處理方法,一方面可以使因觀測衛星變化而導致需要重新開始濾波的現象得以有效克服,另一方面,此方法可以有效地降低求解時的運算量,具有較高的實用性。
2.3 KF在組合導航中的應用
在裝備包括慣導在內的兩種以上導航系統的載體上,常以慣導系統為主,與其他導航系統組合在一起,能夠更好地發揮各自的特點,這種系統稱為組合導航系統。
組合導航的理論與技術始終保持同步發展,其中最常用的組合導航算法就是以KF理論為基礎的最優估計動態算法。多種研究資料表明,KF方法目前仍然是國內外本領域信息融合技術研究的重點。
在組合導航系統中,引用KF對提高組合系統的精度有非常重要的意義。濾波器可以對各個分系統輸出的導航信號實行“加權求和”計算,實時地輸出誤差為最小的導航信號。文獻[12]中提出改進的卡爾曼濾波方法對導航數據進行融合處理。這種方法不僅在精度上比原始的濾波方法有所提高,而且估計出的軌跡也相對比較平滑,這樣既可以解決產生較大的誤差的問題,又可以縮短濾波進入穩定狀態所需要的時間。
目前世界上應用最為廣泛的導航方法主要有全球定位系統GPS和慣性導航系統INS。兩者的結合可以達到優勢互補,取長補短,既克服了GPS易受地形地物(譬如街道、樹蔭、高樓大廈等)遮擋而導致定位的中斷問題又彌補了INS定位誤差隨時間而積累的缺陷。在GPS/INS組合導航系統中,存在諸多不確定因素,一方面是在系統本身元器件方面的不穩定性,比如陀螺和加速度;另一方面還有外部環境的各種不確定性因素影響,這就使系統噪聲和觀測噪聲統計特性描述的準確性變得很困難。
組合導航系統按照KF濾波器的估計內容可分為直接法和間接法;按系統誤差校正的方式可分兩種校正方式,一種為輸出(開環)校正,另一種為反饋(閉環)校正。KF的直接法和間接法各有優缺點。首先,直接法采用狀態方程直接描述了系統導航參數的動態過程,能準確地反映真實狀態的演變情況;間接法的狀態方程為誤差方程,可以利用一階近似的方法進行推導,但是此方法具有一定的近似性;其次,在直接法和間接法中,濾波器都包含位置(或位置誤差)、速度(或速度誤差)和平臺姿態角(或誤差角)。由于位置和速度的導航參數直接體現系統的動態特性,可能變化劇烈,需采用很短的濾波周期,使得計算量較大。但是,由于誤差常為小量,變化也比較平緩,因而間接法的濾波周期可以較長。通常情況下,間接法濾波周期在幾秒到幾十秒的范圍,基本不影響濾波性能。此外,直接法的濾波方程多為非線性方程,如果采用一階近似線性化的方法,則其實質與間接法類似,精度受到影響,但濾波周期卻不能因此而變長,間接法的狀態方程本身就是線性方程,不存在如何線性化問題,且估計參數在數值上也相差不大,便于計算。直接法雖然具有直接反映系統動態方程的特點,但由于實際應用問題的復雜性,間接法依然是目前應用的主流方法。
KF按照對濾波估計值的利用方法分,可分為輸出校正和反饋校正。輸出校正是將濾波器估計出參數誤差,直接校正輸出的導航參數,得到導航參數的最優估計,也稱開環法;反饋較正是將導航參數誤差的估計結果反饋到導航計算中,用以校正導航參數以及慣性儀表誤差,用校正后的導航參數和儀表觀測值進行新的計算,也稱閉環法。從數學模型的角度,輸出校正和反饋校正具有相同的結果,但是在實際應用時,由于KF濾波器是建立在誤差為小量基礎上的,如果采用輸出校正,誤差量數值可能較大,且影響濾波精度。但是采用反饋校正時,由于誤差量不斷地受到校正,能始終保持小量,實際應用可認為不引入濾波方程的模型誤差。
3 KF在導航應用中存在的問題和挑戰
根據目前Kalman濾波器在國際國內導航應用領域的發展情況提出了以下問題和挑戰:
(1)局部導航盲區或導航數據缺失會導致KF遞推算法無以為繼
在GPS定位過程中,由于環境變化或人為因素的影響,可能會出現短時信號屏蔽或接收不到信號,造成局部盲區或導航數據丟失,例如有遮擋或環境復雜情況下,無法達到定位要求。當信號屏蔽時,接收機無法接收到衛星信號,沒有測量信息。KF雖然可以照常進行狀態及均方誤差的時間更新,省略測量更新過程,但是當系統缺少測量值的持續時間過久或者由此導致的狀態估計均方誤差過大,則應當否定濾波結果的有效性,甚至需重置KF濾波器。針對此問題,應該充分發揮組合導航系統的優勢,在有GPS信號情況下,通過擴展型KF(EKF)通過盲區推估算法得出的結果與GPS的定位結果進行最優估計,而在無GPS信號的情況下通過改進EKF算法,以達到縮短盲區的目的。
(2)模型偏差會導致KF結果出現偏差
卡爾曼濾波算法缺乏魯棒性和對模型擾動的抗干擾能力,模型的偏差會導致KF結果出現誤差。在利用KF對實際導航問題進行建模分析時,觀測量所含有的誤差將影響定位參數的精度,這些誤差按性質可以分為系統誤差和隨機誤差。系統誤差主要有與衛星有關的星歷誤差和衛星鐘差、與接收設備有關的接收機鐘差以及與信號傳播有關的大氣折射誤差等;隨機誤差則主要由多路徑效應誤差、噪聲和觀測誤差等構成,這些是不可避免的。
針對星歷誤差可以采用觀測求差法,減弱軌道誤差;衛星鐘差一般可以通過對衛星運行狀態的連續監測確定;模型修正可減少電離層的誤差;采用模型和大氣參數測量結果進行修正可減少對流層的折射誤差,減少對流層延遲的影響;增加觀測時間并減弱周期的影響可以減少多路徑效應誤差。這些都要求所建立的模型要有一定的盡可能準確、或算法具有魯棒性、減弱對模型偏差的敏感度。
(3)原始數據質量問題會導致KF發散
實際導航過程中,用導航系統獲取的原始測量數據難免有雜質甚至斑點。由于KF濾波算法以及前述的各種擴展KF算法缺乏對野值的容錯能力,數據質量問題會導致導航結果可信度的降低。
異常值是影響數據質量的重要因素,處理不當會直接扭曲導航質量,改變測試系統的精度和復雜性。目前,在衛星導航數據預處理中,異常值處理常規方式多為門限檢測與修復或剔除。采用這種方法,異常值處理效果依賴于門限的設定,如果選用的門限值比較小,則含有粗大誤差的異常值被剔除就比較多,反之亦然。如果不恰當地剔除了僅因為隨機誤差較大出現的正常數據,則會造成衛星導航系統精度降低。針對此問題,可以在KF算法基礎上增加自檢功能,和容錯技術相結合改進現有的Kalman濾波算法。
4 結語
KF濾波技術的發展在導航領域有著重要的意義,為導航領域做出了巨大貢獻。本文對KF濾波器在導航技術途徑中應用,尤其是在慣性導航系統、組合導航系統和衛星導航系統的應用進行了分析,介紹了傳統KF存在的狀態和觀測變量都必須是線性的缺點,以及由此發展的能夠在復雜環境和非系統中使用的EKF和UKF等不同形式的濾波器。
對KF濾波技術的研究有利于對導航系統各項參數精度的提高,同時更有利于各項導航工程系統的結合。
針對KF濾波在導航中存在的問題,本文給出了相應的新的解決思路和方法,為改進導航技術和質量提供了潛在的發展方向。
[1] Mohinder S G, Henderson, Randy S M. Application of Kalman Filtering to the Calibration and A Lignment of Inertial Navigation Systems[J]. IEEE Transaction on Automatic Control, 1991, 36 ( 1 ): 4 - 13.
[2] 親永元, 張洪鉞, 汪叔華, 等. 卡爾曼濾波與組合導航原理[M]. 西安: 西北工業大學出版社, 2012.
[3] Benkouider A M,Buvat J C,Cosmao J M,et al.Faultdetection in semibatch reactor using the EKF and statisticalmethod[J]. Journal of Loss Prevention in the Process Industries, 2009, 22 ( 2 ): 153 - 161.
[4] Yamaguchi S, Tanaka T. GPS standard position in using Kalman filter[A]. SICE-ICASE International Conference 2006[C]. Bexco, Busan, Korea, 2006. 1351 - 1354.
[5] 付夢印, 鄧志紅, 張繼偉. Kalman濾波理論及其在導航系統中的應用[M]. 北京: 科學出版社, 2003.
[6] Jia J F. Low-cost MIMU and GPS integrated navigation system using sequential filtering technology[A]. Proceedings of the 30th Chinese Control Conference [C]. 2011. 3864 - 3867.
[7] 陸芳. MIMU中陀螺隨機漂移建模及Kalman濾波技術研究[D]. 太原:中北大學, 2007.
[8] Peng ZZ, Feng JF, Nie GS, et al. A novel fusion algorithm based on modified extend Kalman sequential filtering[J]. Journal of Air Force Engineering University (Natural Science Edition), 2007, 8 ( 5 ): 33 - 36.
[9] Chen Canhui, Zhang Xiaolin, Huo Hangyu. Application of Kalman Filtering based on Sequential Processing for Satellite Navigation[J]. Journal on Communications, 2011, 33 ( 1 ): 174 – 181.
[10] Wang W, Hao YL, Xue B. Study on positioning algorithm for navigation signal based on improved Kalman filter[A]. Proceedings of the 2006 International Conference on Mech- atronics and Automation[C]. Luoyang, China, 2006. 882 - 886.
[11] Jwo D J, Lai C N. Unscented Kalman filter with nonlinear dynamic process modeling for GPS navigation [J]. GPS Solutions, 2008, 12 ( 4 ): 249 - 260.
[12] Zhang L, Chu H B, Zhang N T. Antispoofing extended Kalman filter for satellite navigation receiver[A]. International Conference on Wireless Communications, Networking and Mobile Computing[C]. Shanghai, China, 2007. 996 - 999.
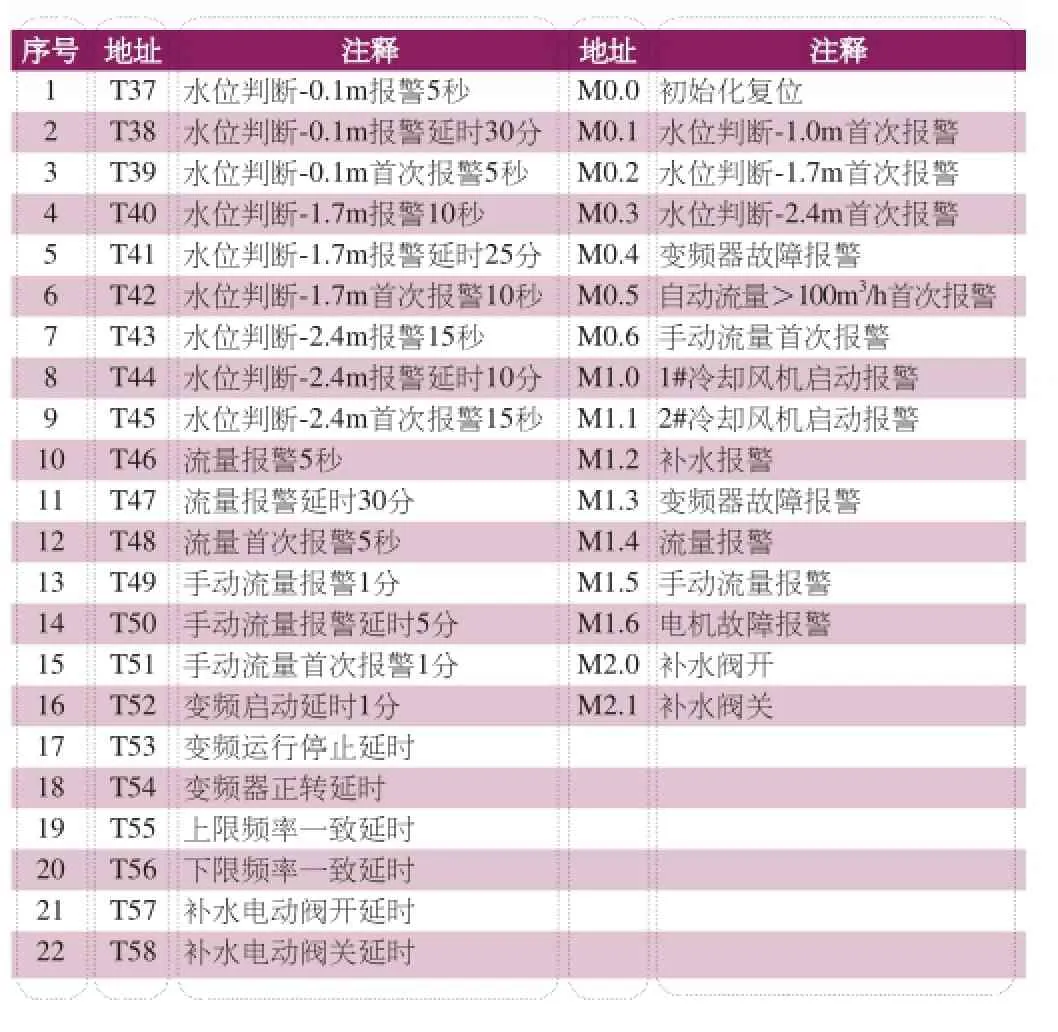
表2 變量說明
4 結語
在恒壓供水系統中,當用水流量小于一臺泵在工頻恒壓條件下的流量,由一臺變頻泵調速恒壓供水;當用水流量增大,變頻泵的轉速自動上升;當變頻泵的轉速上升到工頻轉速,用水流量進一步增大,由PLC控制,自動啟動一臺工頻泵投入,該工頻泵提供的流量是恒定的(工頻轉速恒壓下的流量),其余各并聯工頻泵按相同的原理投入。同時S7-200 PLC還可以對恒壓供水系統中的其他設備和工藝進行控制,充分體現了自動控制的優點。
參考文獻:
[1] 周柏青, 李方園. PLC控制系統設計與應用[M]. 北京: 中國電力出版社, 2015.
[2] 李方園, 楊帆. 西門子S7 PLC應用簡明教程[M]. 北京: 機械工業出版社. 2013.
[3] 李方園. 圖解西門子S7-1200 PLC入門到實踐[M]. 北京: 機械工業出版社. 2011.
作者簡介
李方園(1973-),男,浙江舟山人,高級工程師,畢業于浙江工業大學信息學院工程碩士專業,長期從事于變頻器等現代工控產品的應用與研究工作,現就職于浙江工商職業技術學院。
With the rapid development of science and technology, the Kalman filtering technology is widely used in navigation. In this paper, the application of the Kalman filtering technology in the navigation filed were analyzed. The research achievements in recent years were introduced. The application of Kalman filter in the inertial navigation systems, satellite navigation system and integrated navigation system were mainly introduced. At the same time, point out several technical difficulties. Finally, we provide the potential research direction to improve the application of the Kalman filter in navigation.
Kalman filter; Inertial navigation; Integrated navigation; Extended Kalman filter; Unscented Kalman filter
B
1003-0492(2016)03-0072-04
TN965
國家自然科學基金項目(61473222)
洪騰騰(1992-),女,河南永城人,研究生在讀,現就讀于西安理工大學自動化與信息工程學院,研究方向為導航、制導與控制。
胡紹林(1964-),男,安徽岳西人,博士生導師,研究員,現就職于西安理工大學自動化與信息工程學院、航天器在軌故障診斷與維修重點實驗室。研究方向為復雜系統建模與系統仿真,故障監控與容錯處理及現代計算機控制技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
