步進式加熱爐鋼坯運動的非線性PID控制
2016-11-22 08:22:12魯照權
化工自動化及儀表 2016年9期
關鍵詞:系統
魯照權 程 健
(合肥工業大學電氣與自動化工程學院,合肥 230009)
步進式加熱爐鋼坯運動的非線性PID控制
魯照權 程 健
(合肥工業大學電氣與自動化工程學院,合肥 230009)
在步進梁系統數學模型的基礎上,設計了一種步進式加熱爐鋼坯運動的非線性PID控制方法。仿真實驗結果證明:非線性PID控制可實現步進梁速度的準確、平穩跟蹤,有效消除移動梁托起鋼坯時產生的速度跌落。
非線性PID控制器 步進式加熱爐 步進梁系統 移動梁速度閉環控制
步進式加熱爐是各種加熱爐中使用最廣、發展最快的爐型之一。步進梁是鋼坯加熱爐的核心部件,由固定梁與移動梁構成,其中移動梁由液壓缸驅動做矩形運動,使數百噸的鋼坯在加熱過程中逐步地自入爐側向出爐側移動。步進梁的運動速度既要保證生產的節奏,又要對鋼坯輕托輕放,因此應避免步進梁產生碰撞、損壞移動梁和固定梁。但由于步進梁運動部分的慣性極大,加上負載的階躍式突變,實現其速度和位移的精準控制難度很大。另外,移動梁自身體積大且重,在大型加熱爐中,滿載鋼坯常達數百噸,可見步進梁系統具有典型的大慣性特點。又由于流量、壓力變化及泄漏等因素的影響,使得液壓傳動機構具有非線性特性[1]。因此,控制步進梁在運行周期內各階段平穩、準確、快速地運動一直是工程上的難題,尤其是移動梁托起鋼坯時產生的速度跌落難以消除。目前,國內大部分軋鋼廠均采用以PLC為核心的開環控制方法對加熱爐中的步進梁速度進行控制,但該方法會造成速度控制不準而影響生產周期。為此,筆者針對負載階躍性變化和液壓缸死區非線性的問題[2,3],以某步進式加熱爐為背景,在已建立的數學模型的基礎上,給出步進式加熱爐鋼坯運動的非線性PID控制方法,實現步進梁系統速度的準確跟蹤,以消除速度跌落的問題。
1 步進梁系統的數學描述
在步進梁的4個運動過程中,考慮到上升過程最難控制,且最具代表性,因此筆者只對步進梁的上升過程進行分析。
步進梁系統(圖1)由非對稱電液比例閥、非對稱液壓缸、斜軌式步進機構、移動梁和固定梁構成。

圖1 步進梁系統的結構框圖
FL——負載;
ps——油源壓力;
Uup——電液比例閥的控制信號;
Vup——步進梁垂直運動的速度;
xp——液壓缸活塞位移;
θ——雙輪斜軌式步進機構的斜坡角度
其中液壓缸活塞位移xp的計算式為[4]:
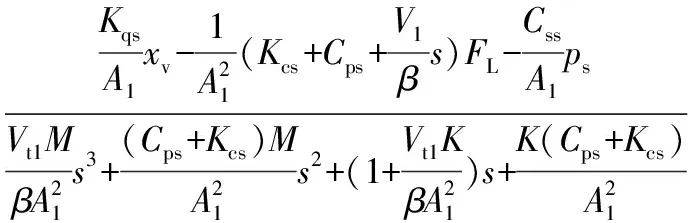
(1)
式中A1——無桿腔的有效面積,m2;
Cps——等效內泄漏系數,m5/(N·s);
Css——等效外泄漏系數,m5/(N·s);
FL——負載,N;
K——彈簧系數,N/m;
Kcs——流量壓力,m5/(N·s);
Kqs——流量增益,m2/s;
M——總質量,kg;
ps——油源壓力,Pa;
V1——液壓缸容積,m3;
Vt1——無桿腔的有效體積,m3;
xp——活塞位移,m;
xv——閥芯位移,m;
β——油液彈性模量,Pa。
步進梁的位移Y(s)的計算式為:
Y(s)=Xp(s)sinθ
(2)
而速度為位移對時間的微分,因此由式(1)、(2)即可得到步進梁的運動速度。
2 非線性PID控制器
經典PID調節器的控制量u(t)取決于控制系統參考輸入r(t)與輸出y(t)的偏差、偏差積分和偏差微分的線性組合,即:

式中e(t)——偏差;
Kp、Ti、Td——比例、積分、微分系數。
然而,參考信號r(t)經常不可微,甚至不連續,輸出y(t)又經常被噪聲污染,因而偏差e(t)按經典意義通常不可微,其微分信號不能利用。因此,用r(t)和y(t)來產生代替經典PID調節器的3個要素,建立新的非線性組合框架,即跟蹤-微分器,來克服以上缺點。跟蹤-微分器的結構框圖如圖2所示[5]。
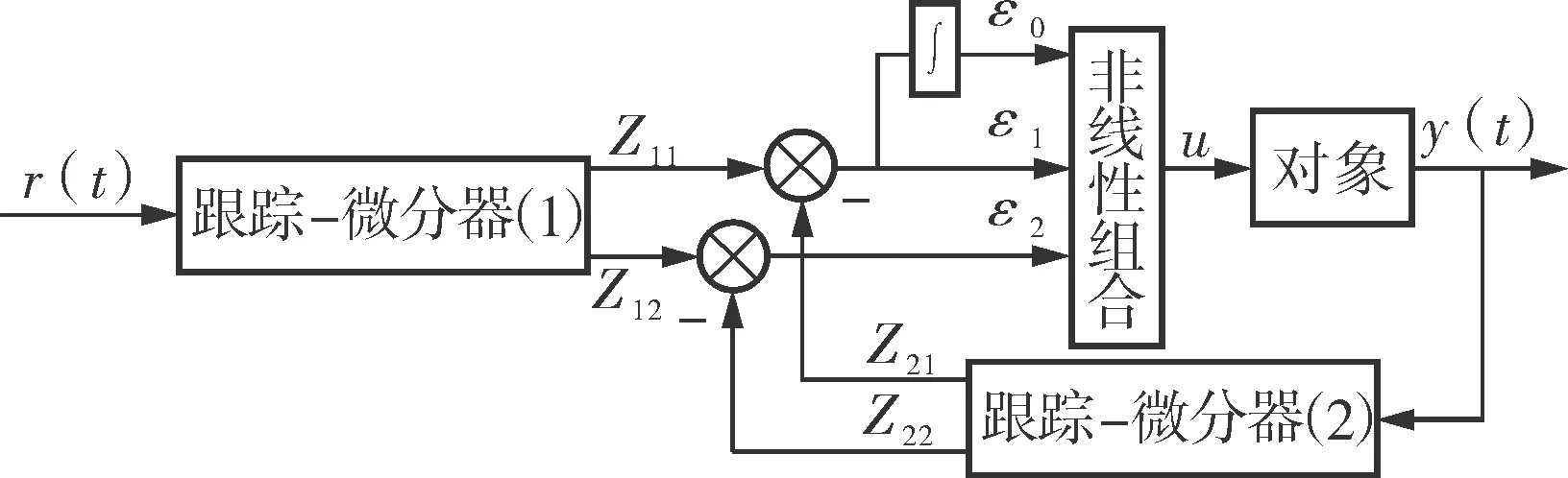
圖2 跟蹤-微分器的結構框圖

用ε1(t)、ε2(t)、ε0(t)代替經典PID控制器中的基本要素e(t)=r(t)-y(t)、e(t)的微分和e(t)的積分,即:
ε1(t)=Z11(t)-Z12(t)
(3)
ε2(t)=Z12(t)-Z22(t)
(4)
(5)
然后將上述變量進行適當的非線性組合即可得到新的控制量u(t)。
這里,非線性PID控制器[6]的基本要素不是直接取自輸入輸出的誤差,而是輸入輸出信號經非線性處理后所得到的新的誤差及其微分、積分,其具體表達形式為:
(6)
根據二階最快速開關系統[7],構造跟蹤-微分器如下:
(7)
(8)
Z5=Z1-Z3
ε0=Z5
ε1=Z1-Z3
ε2=Z2-Z4
u1=β0fal(ε0,α,δ)+β1fal(ε1,α,β)+β2fal(ε2,α,β)
(9)
式(7)為跟蹤-微分器(1),式(8)為跟蹤-微分器(2)。該控制器以r(t)和y(t)為輸入,u(t)為控制量,含有參數R1、δ1、R2、δ2、α、δ、β0、β1、β2。其中,R1根據過渡過程要求確定;δ1是與積分步長和R1有關的參數,由跟蹤-微分器的單獨仿真來確定;R2通常取值較大;δ2=R2δ1/R1;α在0.5~1.0之間;δ較小;β0、β1、β2是PID控制器的增益系數,尚無確定的方法調整,只能通過仿真確定。
3 系統仿真與分析
3.1系統相關參數與計算
以某步進梁系統作為研究對象,其參數[8]為:β=1.0GPa,A1=0.0616m2,Kqs=1.23m2/s,Kcs=3.07×10-9m5/(N·s),M=1.31×105kg,V1=7.68×10-2m3,Vt1=1.96×10-2m3,Css=-6.9×10-12m5/(N·s),Cps=7.66×10-11m5/(N·s),ps=16MPa。
考慮到系統的結構特點,忽略系統的彈性負載K,將系統參數代入液壓缸模型表達式,得到其位移y與閥芯位移xv和負載FL之間的關系為:
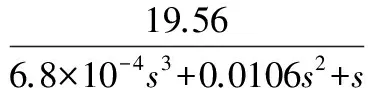
(10)
3.2仿真與結果分析
根據圖2和式(10),在Matlab/Simulink中搭建如圖3所示的控制程序。圖3中,wfgzq和wfgzq2為兩個跟蹤-微分器,是根據式(7)、(8)編寫的s函數;ncb為非線性組合,是根據式(6)、(9)編寫的m函數。經過大量的仿真與實驗調試,最后確定的一組控制器參數為:R1=1,δ1=5,R2=20,δ2=100,α=0.7,δ=4,β0=8.5,β1=30,β2=0.8。
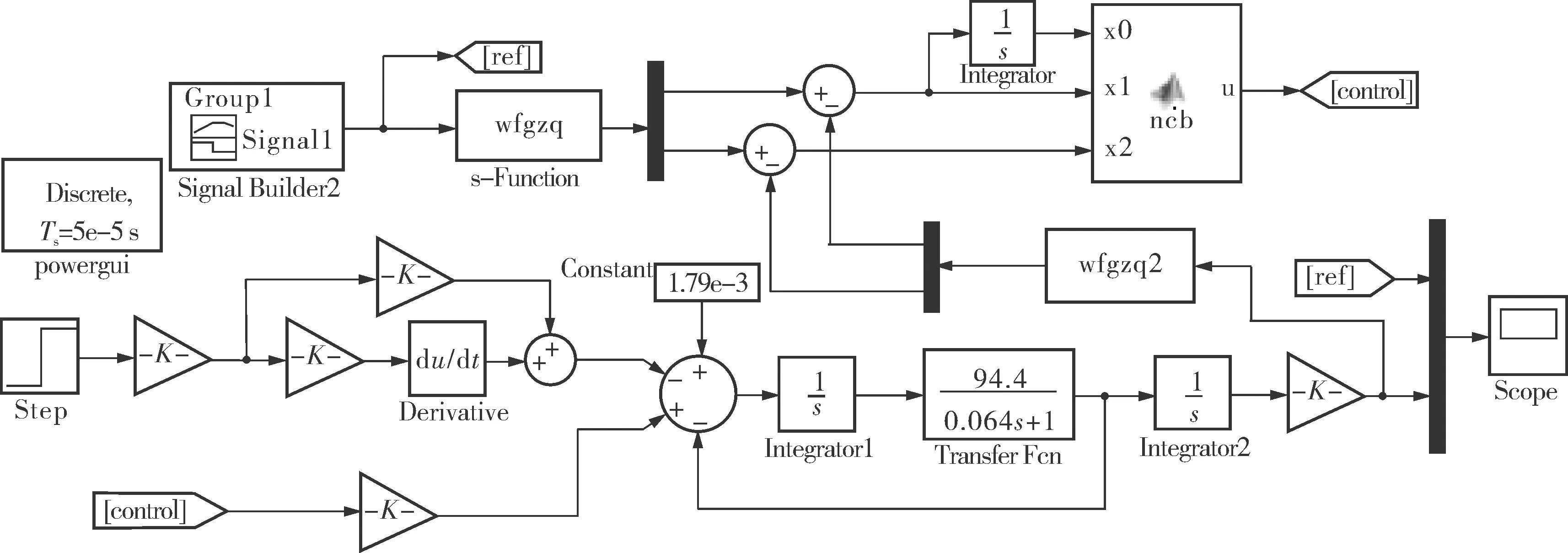
圖3 步進梁系統的非線性PID控制程序
仿真時,將給定信號調整為步進梁系統在現場的運行速度曲線,即梯形運行曲線[9]。系統分別采用普通PID控制器和非線性PID控制器控制時,所得速度響應曲線如圖4所示。可以看出,普通PID控制步進梁運動時,在突加負載時,即移動梁托起鋼坯時(6s),出現2mm/s的速度跌落,造成鋼坯運動速度的嚴重不穩定。而采用非線性PID控制時,在突加負載時,速度基本保持不變,保證了移動梁運送鋼坯時速度的準確性與穩定性。
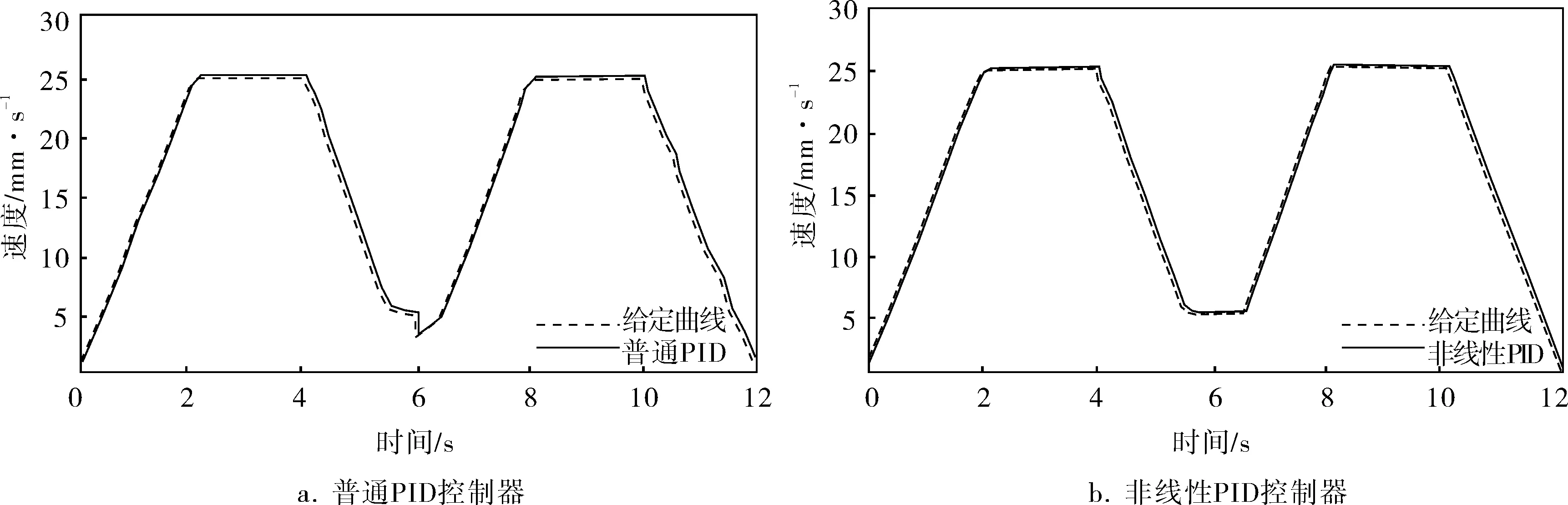
圖4 不同控制器作用下的步進梁速度曲線
4 結束語
筆者針對步進式加熱爐負載階躍性突變和液壓缸死區非線性的問題,基于步進梁的數學模型,設計了一個非線性PID控制器,并將它應用于對步進梁速度的控制。仿真分析結果表明,非線性PID控制方法相比于普通PID控制,實現了步進梁運動速度的準確、穩定跟蹤,消除了移動梁托起鋼坯時的速度跌落,提高了抗負載擾動的性能。
[1] 魯照權,任才橫,何娟,等.基于自適應解耦的加熱爐燃燒系統控制[J].化工自動化及儀表,2013,40(7):827~830.
[2] 趙艷東,任憲勇,張興隆,等.基于階躍模型的非線性模糊PID控制算法研究[J].化工自動化及儀表,2010,37(7):28~31.
[3] Ni J,Peng L.Nonlinear Modeling and Control for Electro Hydraulic Servo System in Pipe Expanding Process[J].IEEE Conference on Decision & Control,2009,45(5):6034~6039.
[4] 鄒揚舉.步進式加熱爐電液控制系統分析與建模[D].合肥:合肥工業大學,2013.
[5] 韓京清,王偉.非線性跟蹤-微分器[J].系統科學與數學,1994,14(2):177~183.
[6] 韓京清.非線性PID控制器[J].自動化學報,1994,20(4):487~490.
[7] 韓京清.控制理論——模型論還是控制論[J].系統科學與數學,1989,9(4):328~335.
[8] 魯照權,鄒揚舉,任才橫,等.步進爐鋼坯測量與定位控制系統[J].電子測量技術,2012,35(10):36~40.
[9] 曾良才,陳奎生,湛從昌,等.步進梁加熱爐速度智能控制技術研究[J].武漢科技大學學報(自然科學版),2008,31(1):23~27.
NonlinearPIDControlofBilletSteelMovementinWalkingBeamFurnace
LU Zhao-quan, CHENG Jian
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology,Hefei230009,China)
Basing on establishing walking beam’s mathematical model, a nonlinear PID control over the billet steel’s movement in walking beam furnace was designed. The simulation results show that, this nonlinear control method can realize accurate tracking of the velocity of the walking beam and can eliminate any velocity drop of the billet steel incurred by jack-up of the walking beam.
nonlinear PID control, walking beam furnace, walking beam system, closed-loop control over walking beam’s velocity
TH865
A
1000-3932(2016)09-0897-04
2015-12-22(修改稿)
國家自然科學基金項目(60974022);合肥工業大學企業委托項目(105-432683/11-037)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
