基于一類二階線性變參系統(tǒng)特征結(jié)構(gòu)配置的完全參數(shù)化方法
2016-11-22 09:09:31安博林
化工自動化及儀表 2016年5期
關(guān)鍵詞:系統(tǒng)
安博林
(東北電力大學(xué)自動化工程學(xué)院,吉林 吉林 132012)
基于一類二階線性變參系統(tǒng)特征結(jié)構(gòu)配置的完全參數(shù)化方法
安博林
(東北電力大學(xué)自動化工程學(xué)院,吉林 吉林 132012)

二階線性時(shí)變參數(shù)系統(tǒng) 特征結(jié)構(gòu)配置 比例微分控制律 航天器在軌加油
非線性系統(tǒng)在混沌運(yùn)動控制[1]、最優(yōu)控制[2]、模糊建模[3]、魯棒控制[4]及預(yù)測控制[5]等工程領(lǐng)域有著十分廣泛的應(yīng)用前景。眾所周知,非線性系統(tǒng)的線性變參增益調(diào)度控制可以看作是線性控制技術(shù)向非線性控制技術(shù)的一種拓展[6,7]。在實(shí)際應(yīng)用中許多非線性系統(tǒng)可以由線性變參系統(tǒng)代替。由于一個(gè)多變量線性變參系統(tǒng)的穩(wěn)定和動態(tài)表現(xiàn)與該系統(tǒng)的特征結(jié)構(gòu)配置息息相關(guān),因此對于系統(tǒng)特征結(jié)構(gòu)配置問題的研究在控制理論及其應(yīng)用方面具有十分重要的意義。
考慮一類通過比例微分控制來解決其特征結(jié)構(gòu)配置問題的二階線性變參系統(tǒng):

(1)
其中,q(t)是狀態(tài)向量,q(t)∈Rn;u(t)是輸入向量,u(t)∈Rr;θ(t)為時(shí)變參數(shù)向量,θ(t)=[θ1(t),θ2(t),…,θN(t)]T∈RN;A(θ)、B(θ)和C(θ)均為θ(t)的顯函數(shù),A(θ)∈Rn×n,B(θ)∈Rn×r,C(θ)∈Rn×n,B(θ)為關(guān)于θ(t)的滿秩矩陣。
假設(shè)1 [A(θ)B(θ)]關(guān)于θ(t)為能控。

通過矩陣變換可以將二階線性變參系統(tǒng)(1)等效成一個(gè)一階線性變參系統(tǒng):

(2)



(3)
但是這不可避免地涉及到2n維矩陣的操作從而導(dǎo)致計(jì)算較為繁瑣,因此如何減少計(jì)算量,提出一個(gè)更為簡潔有效的方法成為了研究學(xué)者迫切需要解決的問題。
在矩陣對[A(θ)B(θ)]能控的前提下,筆者提供了一個(gè)通過比例微分反饋來解決二階線性變參系統(tǒng)特征結(jié)構(gòu)配置問題的簡潔完整的參數(shù)化方法以及基于閉環(huán)特征值和一組參數(shù)向量的針對閉環(huán)特征向量和反饋增益的簡潔完整的參數(shù)化表達(dá)式。上述閉環(huán)特征值和參數(shù)是根據(jù)該閉環(huán)系統(tǒng)的各種需要所選取的。筆者提出的方法之所以簡潔是因?yàn)樵摲椒ǖ挠?jì)算量主要集中在兩個(gè)多項(xiàng)式矩陣的化簡或者兩組在事先選取合適閉環(huán)特征值前提下的奇異值分解,而且只是直接利用原有系統(tǒng)的系數(shù)A(θ)、B(θ)和C(θ),所涉及到的操作僅僅針對n維矩陣。
1 問題描述
比例微分控制律為:

K(θ)=[K0(θ)K1(θ)]
(4)
將式(4)應(yīng)用到系統(tǒng)(1)或(2)中,即可獲得如下形式的閉環(huán)系統(tǒng):
(5)
其中,
Ac(θ(t))=A′(θ(t))+B′(θ(t)K(θ(t))
(6)
基于一般情形考慮,進(jìn)行如下推導(dǎo)。
令Γ(θ)={si(θ),si(θ)∈C,i=1,2,…,n′,1≤n′≤2n}為矩陣Ac(θ)的一組特征值,并且該組特征值關(guān)于實(shí)軸對稱(共軛復(fù)數(shù))。設(shè)上述特征值si(θ)的代數(shù)重?cái)?shù)和幾何重?cái)?shù)分別為mi和qi,則在矩陣Ac(θ)的Jordan標(biāo)準(zhǔn)型F(θ)中有qi個(gè)與特征值si(θ)相關(guān)的Jordan塊。若記這些Jordan塊的階數(shù)為pij,j=1,2,…,qi,則有:
(7)

(8)
其中滿足式(7)的Γ(θ)和pij,qi,mi,i=1,2,…,n′,j=1,2,…,qi,可以描述成如下形式:

將式(8)轉(zhuǎn)換成如下參數(shù)化形式:
A′(θ)V(θ)+B′(θ)K(θ)V(θ)=V(θ)F(θ)
(9)
其中F(θ)∈R2n×2n為Ac(θ)的Jordan形式。
綜上所述,通過比例微分控制律(4)來解決二階線性變參系統(tǒng)(1)的特征結(jié)構(gòu)配置問題(ESA)描述如下:
給出矩陣A(θ)、C(θ)∈Rn×n、B(θ)∈Rn×r和一系列共軛復(fù)數(shù)si,i=1,2,…,2n,找到所有滿足式(9)的矩陣K(θ)∈Rr×2n和V(θ)∈C2n×2n,其中det(V(θ))≠0且矩陣A′(θ)和B′(θ)均由式(3)構(gòu)成。
筆者的主要目的就是在矩陣對[A(θ)B(θ)]能控的情況下,為解決二階線性變參系統(tǒng)(1)的特征結(jié)構(gòu)配置問題提供一個(gè)操作過程直接針對原系統(tǒng)系數(shù)A(θ)、B(θ)和C(θ)的簡潔方法。
2 初步分析
眾所周知,當(dāng)且僅當(dāng)下式成立的前提下矩陣對[A(θ)B(θ)]才可以保證能控:
rank[A(θ)-sIB(θ)]=n,?s∈C
(10)
當(dāng)式(10)成立時(shí),則存在一對幺模矩陣P(θ,s)和Q(θ,s)滿足:
P(θ,s)[A(θ)-sIB(θ)]Q(θ,s)=[0I]
(11)
對Q(θ,s)進(jìn)行如下分塊:
(12)
將K(θ)=W(θ)V-1(θ)代入到式(9)中得到如下Sylvester方程:
A′(θ)V(θ)+B′(θ)W(θ)=V(θ)F(θ)
(13)
因此二階線性變參系統(tǒng)的特征結(jié)構(gòu)配置問題就轉(zhuǎn)化成了Sylvester方程(13)的求解問題,其中矩陣V(θ)∈Cn×p和W(θ)∈Cr×p即為所求。
引理1 令[A(θ)B(θ)]為能控,則式(13)所有的解決方案可以歸納為如下形式:
(14)
或者等效為:
vi(θ)=Q12(θ,si(θ))P(θ,si(θ))ri+Q11(θ,
si(θ))fi(θ)
wi(θ)=Q22(θ,si(θ))P(θ,si(θ))ri+Q12(θ,
si(θ))fi(θ)
(15)
i=1,2,…,p
其中fi(θ)∈Cr,i=1,2,…,p為一組任意參數(shù)向量。
構(gòu)建一組能控的矩陣對[A′(θ)B′(θ)],則下述結(jié)論成立。
引理2 若[A(θ)B(θ)]為能控,則所構(gòu)建的矩陣對[A′(θ)B′(θ)]也是能控的,當(dāng)且僅當(dāng)如下條件滿足時(shí):
rank[Q12(θ,s)P(θ,s)C(θ)+sInQ11(θ,s)]=n,
?s∈C
(16)
同時(shí)式(16)也可以等效為存在一組幺模矩陣H(θ,s)和L(θ,s),滿足:
H(θ,s)[Q12(θ,s)P(θ,s)C(θ)+sIn-Q11(θ,s)]·
L(θ,s)=[0In]
(17)
并將式(17)中的多項(xiàng)式矩陣L(θ,s)分塊成如下形式:
(18)
然后引出下面的定理。
引理3 假設(shè)式(17)對于幺模矩陣H(θ,s)和L(θ,s)均成立,則存在所有向量y(θ)和z(θ)滿足:
[Q12(θ,s)P(θ,s)C(θ)+sIn]y(θ)-Q11(θ,s)z(θ)=0
(19)
其中y(θ)、z(θ)滿足如下條件:
y(θ)=L11(θ,s)g(θ),z(θ)=L21(θ,s)g(θ)
(20)
且g(θ)∈Cr為任意參數(shù)向量。
3 ESA問題的解決方案
設(shè)
(21)
則式(9)可以被分解為如下形式:
V2(θ)=V1(θ)F(θ)
(22)
A(θ)V2(θ)+B(θ)W(θ)=V2(θ)F(θ)-C(θ)V1(θ)
(23)
由此可得式(23)符合式(13)形式,根據(jù)引理1得:
V2i(θ)=-Q12(θ,si(θ))P(θ,si(θ))C(θ)v1i(θ)+
Q11(θ,si(θ))fi(θ),i=1,2,…,2n
(24)
wi(θ)=-Q22(θ,si(θ))P(θ,si(θ))C(θ)v1i(θ)+
Q21(θ,si(θ))fi(θ),i=1,2,…,2n
(25)
式(22)可以等效寫成如下形式:
v2i(θ)=si(θ)v1i(θ),i=1,2,…,2n
(26)
式(24)和式(26)聯(lián)立可得:
[Q12(θ,si(θ))P(θ,si(θ))C(θ)+si(θ)In]v1i(θ)-Q11(θ,si(θ))fi(θ)=0,i=1,2,…,2n
(27)
由于式(27)符合式(19)的形式,則根據(jù)引理3可得:
v1i(θ)=L11(θ,si(θ))gi(θ),i=1,2,…,2n
(28)
fi(θ)=L21(θ,si(θ))gi(θ),i=1,2,…,2n
(29)
其中g(shù)i(θ)∈Cr,i=1,2,…,2n為一組任意參數(shù)向量。
將式(28)代入式(26)中可得:
v2i(θ)=si(θ)L11(θ,si(θ))gi(θ),i=1,2,…,2n
(30)
此外,將式(28)、(29)代入式(25)中,可以得到向量wi(θ),i=1,2,…,2n和參數(shù)向量gi(θ),i=1,2,…,2n的表達(dá)式。因此,可以獲得如下定理來求解該系統(tǒng)的ESA問題。
定理1 若[A(θ)B(θ)]和[A(θ)′B′(θ)]均為能控,則綜合上述推理可以得到該系統(tǒng)特征結(jié)構(gòu)配置問題的求解方案:
(31)
K(θ)=W(θ)V-1(θ)
(32)
其中矩陣W(θ)由wi(θ)構(gòu)成:
wi(θ)=[Q21(θ,si(θ))L21(θ,si(θ))-Q22(θ,si(θ))·P(θ,si(θ))C(θ)L11(θ,si(θ))]gi(θ),i=1,2,…,2n
(33)
且gi(θ)∈Cr(i=1,2,…,2n)是一組滿足下述約束條件的參數(shù)向量:

約束條件C2 det[V]≠0
上述定理中的約束條件C1是為了保證式(21)或式(32)中的矩陣K(θ)為實(shí)。
4 數(shù)值算例
參考一個(gè)在文獻(xiàn)[8]中提供的航天器在軌加油的一般過程,該航天器在軌加油的姿態(tài)動力學(xué)模型可以表示成如下形式:
(34)
其中φ(t)、φ(t)、ψ(t)表示航天器的俯仰角、滾動角、偏航角;ω0表示軌道角速度;Ix(t)、Iy(t)、Iz(t)表示航天器的轉(zhuǎn)動慣量I(t)在坐標(biāo)系下的各軸分量;Ux、Uy、Uz表示航天器在坐標(biāo)系各軸上的力矩分量。
先通過矩陣變換求得模型(34)滿足式(1)的參數(shù)矩陣:
(35)
q=[φ(t)φ(t)ψ(t)]T為狀態(tài)向量,u=[UxUyUz]T為輸入向量,而θ=[Ix(t)Iy(t)Iz(t)]T為時(shí)變參數(shù)向量。矩陣對[A(θ)B(θ)]和[A′(θ)B′(θ)](由式(3)定義)在該系統(tǒng)中均為能控。
通過計(jì)算易得一組滿足式(11)的幺模矩陣P(θ,s)和Q(θ,s):
P(θ,s)=diag[1 1 1]
(36)
(37)
同時(shí)還可以獲得一組滿足式(17)的幺模矩陣H(θ,s)和L(θ,s):
H(θ,s)=diag[1 1 1]
(38)
(39)
V=[αiβiγisiαisiβisiγi]T,i=1,2,…,6
(40)
進(jìn)一步由式(33)可以求得矩陣W(θ,s):
(41)
眾所周知,如果一個(gè)矩陣的Jordan型是一個(gè)對角矩陣,那么該矩陣的特征值對于矩陣中的參數(shù)擾動并不敏感。因此,出于魯棒性和減少對參數(shù)擾動敏感性的考慮,選取不同的閉環(huán)系統(tǒng)特征值如下:
(42)
其中由式(35)給出的aij和bij均為關(guān)于時(shí)變參數(shù)向量θ[Ix(t)Iy(t)Iz(t)]T的函數(shù)。
將所設(shè)計(jì)的狀態(tài)反饋控制器(42)應(yīng)用到航天器在軌加油姿態(tài)控制系統(tǒng)模型(34)當(dāng)中去。假設(shè)該航天器的姿態(tài)角速度均為0°/s(即0rad/s),初始姿態(tài)角均為1°(即0.0175rad),在初始狀態(tài)下,x(0)=[0 0.0175 0 0.0175 0 0.0175]T閉環(huán)系統(tǒng)3個(gè)姿態(tài)角的初始值響應(yīng)和仿真結(jié)果如圖1所示。從圖中可以看出,3個(gè)姿態(tài)角的時(shí)間響應(yīng)變化迅速且穩(wěn)態(tài)誤差最終趨于0。
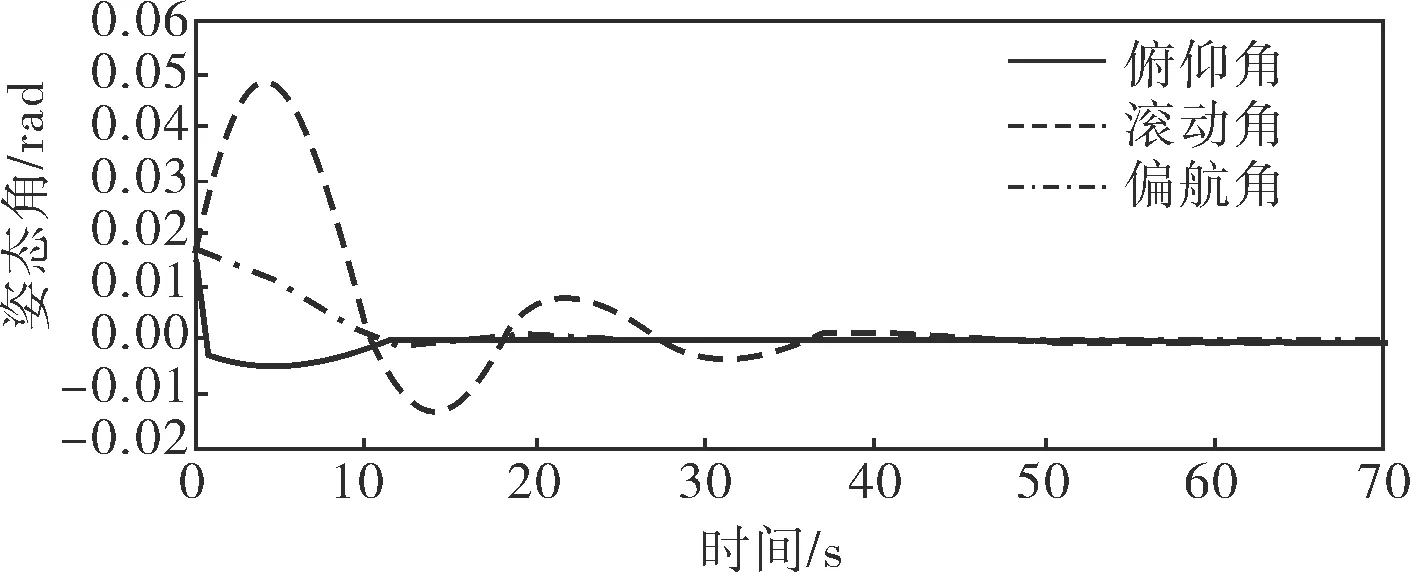
圖1 姿態(tài)角的時(shí)間響應(yīng)
仿真結(jié)果表明:所獲得的比例微分控制律保證了所設(shè)計(jì)的閉環(huán)系統(tǒng)的穩(wěn)定性,同時(shí)也驗(yàn)證了前文推導(dǎo)出的算法的有效性和實(shí)用性。
5 結(jié)束語
解決了一類基于比例微分控制律的二階線性變參系統(tǒng)的特征結(jié)構(gòu)配置問題,并提出了兩個(gè)分別針對閉環(huán)特征向量矩陣和反饋增益的簡潔完整的參數(shù)化表達(dá)式。上述主要的操作過程在于兩組初等矩陣的變換或者兩組奇異值分解,計(jì)算量僅僅涉及到n維矩陣。然后選取合適的自由參量和閉環(huán)特征值來獲得滿足系統(tǒng)要求的比例微分控制律。最終通過一個(gè)航天器在軌加油姿態(tài)控制系統(tǒng)模型來驗(yàn)證所推導(dǎo)出的線性變參控制方法的實(shí)用性和有效性,同時(shí)從仿真結(jié)果中可以得出上述線性變參控制律保證了所設(shè)計(jì)閉環(huán)系統(tǒng)的穩(wěn)定性并提供了良好的性能。
[1] 韓明君,李有堂,朱麗,等.干氣密封系統(tǒng)軸向非線性動力穩(wěn)定性[J].化工機(jī)械,2012,39(3):308~312.
[2] 高德欣,楊曉燕.受擾動非線性系統(tǒng)的反饋線性化最優(yōu)控制[J].化工自動化及儀表,2010,37(8):19~22.
[3] 趙艷東,任憲勇,張興隆,等.基于階躍模型的非線性模糊PID控制算法研究[J].化工自動化及儀表,2010,37(7):28~31.
[4] 周碩.一類非線性不確定時(shí)滯系統(tǒng)魯棒預(yù)測控制[J].化工自動化及儀表,2011,38(2):149~152.
[5] 張燕,申森.基于快速正交搜索算法的非線性預(yù)測控制[J].化工自動化及儀表,2014,41(11):1226~1244.
[6] Rugh W J,Shamma J S.Research on Gain Scheduling[J].Automatica,2000,36(10):1401~1425.
[7] Leith D J,Leithead W E.Survey of Gain-scheduling Analysis and Design[J].International Journal of Control,2000,73(11):1001~1025.
[8] 張龍.航天器在軌加注的姿態(tài)動力學(xué)與控制[D].哈爾濱:哈爾濱工業(yè)大學(xué),2009.
(Continued on Page 538)
CompletelyParameterizedApproachforEigenstructureAssignmentinSecond-orderLinearParameter-varyingSystem
AN Bo-lin
(SchoolofAutomationEngineering,NortheastDianliUniversity,Jilin132012,China)

TP13
A
1000-3932(2016)05-0457-06
2016-04-06(修改稿)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32