單波束相控陣雷達的時間資源聯合分配算法
2016-11-23 13:45:54戴奉周劉宏偉
西安電子科技大學學報 2016年5期
關鍵詞:資源
秦 童,戴奉周,劉宏偉,方 明
(西安電子科技大學雷達信號處理國家重點實驗室,陜西西安 710071)
單波束相控陣雷達的時間資源聯合分配算法
秦 童,戴奉周,劉宏偉,方 明
(西安電子科技大學雷達信號處理國家重點實驗室,陜西西安 710071)
在實際應用中,單波束相控陣雷達分時生成多個方向的波束,對多個目標進行照射并跟蹤.針對該問題,筆者提出了一種時間資源與波束寬度聯合管理算法,以節約雷達用于跟蹤的時間資源.文中以概率密度函數描述雷達對目標的跟蹤誤差,綜合考慮了雷達對目標的測距與測速精度的影響.采用最優化的方法,對雷達照射目標的駐留時間與波束寬度進行求解.仿真結果表明,相對于傳統的自適應調整時間資源的方法,文中提出的方法在保證跟蹤精度符合要求的條件下,能夠有效地節約雷達用于跟蹤的時間資源.
相控陣雷達;雷達資源管理;波束寬度
近年來,相控陣雷達技術已經取得了快速的發展.這種類型的雷達可以靈活地改變發射波的照射方向,選擇需要照射的目標,調整發射功率、駐留時間與波束寬度等參數.這些特性提供了管理、優化雷達資源的可能性,進而可以對駐留時間、重訪時間與波束寬度等雷達資源進行合理的管理,以達到節約雷達消耗的功率,提高測量、跟蹤精度,提高最大跟蹤目標的數量,節約時間消耗等效果.
目前已有一些關于雷達資源優化的研究工作,主要包括對雷達發射功率的優化與電磁波照射目標的重訪時間間隔的調整.對于雷達發射功率資源的管理,文獻[1-2]采用跟蹤誤差的克拉美羅界,作為評價標準,對單站或多站的雷達發射功率進行優化;文獻[3-6]則采用跟蹤濾波的協方差作為評價函數,利用最優化方程的方法對雷達的功率資源進行優化與分配.而對于時間資源的管理,主要集中在調節雷達照射目標的駐留時間或重訪時間間隔方面.例如文獻[7]利用雷達對目標跟蹤的協方差作為評價函數,對重訪時間間隔進行自適應的調整;文獻[8]在雷達時間資源有限的條件下,按照目標的優先級與威脅程度,對駐留時間進行調整;文獻[9]以雷達對目標的跟蹤精度作為評價函數,進而調整駐留時間.
對于單波束雷達,傳統的雷達在同一個時刻僅照射一個目標.如果兩個目標在某個時刻在雷達方位角范圍內較近,則發射一個較寬的波束即可照射兩個目標.采用這種方法,雖然照射每個目標的功率略有降低,但是可以大幅提高照射每個目標的駐留時間,這對于雜波抑制、提高測速精度具有重要的意義.
綜上所述,筆者采用概率密度函數對目標跟蹤誤差進行評價,綜合考慮雷達發射波的駐留時間與波束寬度對跟蹤誤差的影響.以跟蹤誤差作為評價函數,建立優化模型,對雷達照射目標的電磁波的波束寬度與駐留時間進行調整,從而達到節約雷達時間資源的效果.
1 跟蹤模型
雷達對目標在k時刻的位置xk的后驗概率表示為p(xk),對后驗概率進行推導,可以得到

其中,p(yk)表示雷達對目標位置測量的概率,p(θk)表示雷達對目標角度測量的概率,表示雷達對目標速度測量的概率,p(k-1)表示目標在k-1時刻的位置的概率,p(k|k)表示測量后目標速度的后驗概率,表示對當前目標跟蹤位置的后驗狀態估計.


因此,目標位置的后驗概率表示為

通過式(4)的描述,可以看到,影響雷達對目標進行跟蹤的效果受到以下幾個因素的影響:雷達對目標位置的量測概率p(yk|xk)、對目標速度的量測概率p(θk|xk)、目標速度的估計與上一個時刻目標的位置估計p(k-1)等.
2 跟蹤誤差描述
2.1信噪比
根據雷達方程可知,雷達照射目標回波的信噪比(SignalNoiseRatio,SNR)RSNR與雷達電磁波的發射功率P、駐留時間τ、天線增益G、目標與雷達徑向距離R、目標的雷達散射截面(RadarCrossSection,RCS)SRCS等有關,即

天線波束寬度越小,定向角度分辨率越高,探測精度越高.而天線的增益G與天線波束寬度關系為

其中,?w表示天線在垂直方向上的波束寬度,θB表示天線在水平方向上的波束寬度.
2.2距離量測
雷達對目標位置測量的概率密度函數p(yk|xk)可以表示為表示目標的位置量測yk服從以xk為均值、為方差的正態分布.方差的克拉美羅下


其中,BCRLB(xk)表示對于目標的位置量測的克拉美羅界,c表示光速,2表示均方帶寬.
2.3速度量測


2.4角度量測
角度測量的精度取決于波束的寬度與回波信噪比.角度測量誤差的方差σθ描述為

其中,δ表示波束間距,θB表示波束寬度.
2.5狀態轉移

其中,T表示當前時刻距離上一次雷達照射該目標的重訪時間間隔,σ2表示目標在飛行過程中單位時間的狀態噪聲方差.即目標狀態轉移的概率密度函數可以描述為當前目標的位置狀態xk,服從以為均值,(Tσ)2為方差的正態分布.
2.6跟蹤誤差
在跟蹤過程中,目標n在k時刻丟失的概率Ploss(k,n)可以描述為在跟蹤過程中,雷達對于目標位置的估計值與真實值差距超過門限的概率,表示為

3 資源管理算法
根據以上跟蹤模型的描述,雷達照射目標的發射功率P,駐留時間τ,波束寬度θB均會對跟蹤目標的誤差產生影響.對于單波束相控陣雷達,可以同時生成單個波束對一個或多個目標進行照射.如果幾個目標距離較近,則可以通過增加雷達波束寬度來同時照射這幾個目標.因此,根據目標情況,通過調節照射目標的駐留時間τ與波束寬度θB,在保證跟蹤效果的前提下,可以節約跟蹤所消耗的時間資源.
在某個時間段內,雷達需要對其視線范圍內的所有目標進行跟蹤.將全部目標分為M(M<N)組,即雷達分別產生M次波束,每個波束駐留時間為τm,m∈[1,M].當若干個目標較近時,如果采用較寬波束消耗的駐留時間小于分別照射的駐留時間之和,則可以分為一組,并同時進行照射.在該時間段內,雷達需要保證對每個目標的丟失概率Ploss(m,n)小于門限Pthr,即Ploss(m,n)<Pthr.因此,優化方程可以寫為
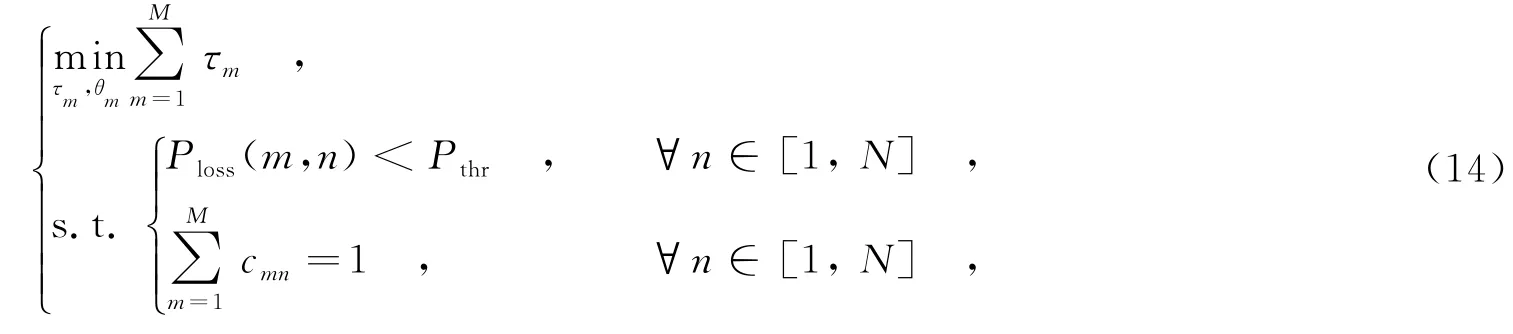
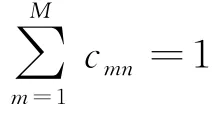
根據以上優化模型,分別對每個時間段內用于跟蹤的時間資源進行分配,計算需要產生的波束個數M,每個波束m的寬度θB(m)與駐留時間τm,以及每次需要照射的目標cmn.
4 仿真結果
假設100 km×200 km的范圍內場景中共有15個目標,采用標準的波束進行照射后的回波信噪比處于10~23 dB范圍內,其中一部分目標所在位置較為集中.仿真場景與每個目標的回波信噪比如圖1所示.
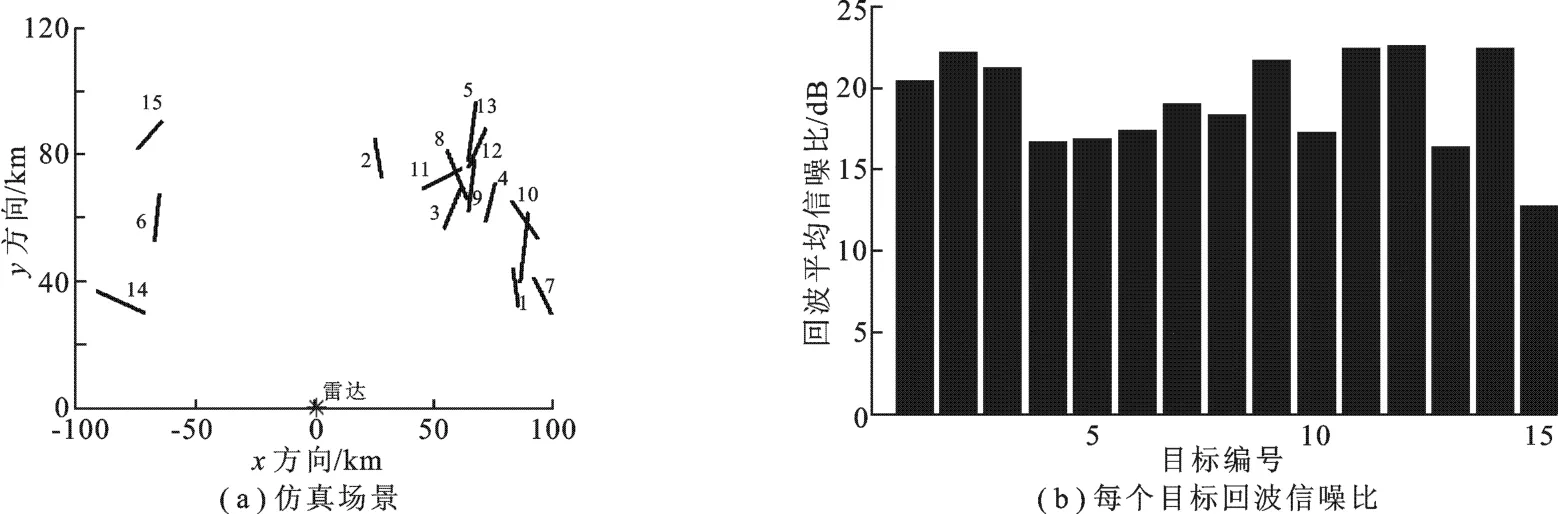
圖1 仿真場景與每個目標的回波信噪比
仿真基于單波束火控相控陣雷達,分別采用兩種方法對雷達的時間資源與波束寬度進行調整窄波束方法:根據對目標跟蹤誤差的預測,分配給每個目標合適的駐留時間,而不對波束寬度進行調整.寬波束方法:采用文中提出的資源管理算法,對雷達的照射目標的波束寬度與駐留時間進行聯合調整.雷達在跟蹤過程中,每個目標的重訪時間間隔為1 s,并保證每個目標的估計位置與真實位置的誤差小于15 m.分別采用兩種方法后,每個目標的跟蹤誤差如圖2(a)所示,而兩種方法在每次分配后消耗的總時間資源如圖2(b)所示.

圖2 每個目標的跟蹤誤差與全部目標消耗的時間資源
在仿真過程中,目標1、2、3處于編組飛行狀態,目標8與目標11在一段時間內所在位置較近,目標8與目標9在一段時間內所在位置較近,因此,這幾個目標均在一段時間內采用單個寬波束進行照射.通過圖2 (a)可以看到,采用兩種方法均可以保證雷達對場景內目標跟蹤的誤差處于門限之下.而通過圖2(b)可以看到,通過對波束寬度進行調整,可以根據目標狀態有效管理雷達資源,節約了約30%的時間資源.對單波束相控陣雷達進行波束寬度、時間的管理,對于提升雷達性能、節約雷達資源具有重要的意義.
5 結 論
針對單波束相控陣雷達對多個目標進行跟蹤的情況,提出了一種雷達照射目標的駐留時間與波束寬度的資源管理算法,目的是在保證雷達對目標跟蹤效果的前提下,節約雷達用于跟蹤的時間資源.由于傳統的評價雷達對目標跟蹤誤差描述的函數,無法衡量速度量測的影響,而駐留時間的長度對于測速精度有著巨大的影響.因此,筆者采用概率密度函數的方法,綜合測速精度與測距精度的影響,以目標的丟失概率作為跟蹤誤差的評價函數.在跟蹤過程中,對場景內的目標進行分組,采用最優化的方法為每個目標分配合適的駐留時間與波束寬度.
仿真實驗表明,相對于傳統的自適應駐留時間調整方法,采用文中方法在保證跟蹤效果的前提下,可以節約30%的時間資源,對于雷達具有重要的意義.
[1]嚴俊坤,糾博,劉宏偉,等.一種針對多目標跟蹤的多基雷達系統聚類與功率聯合分配算法[J].電子與信息學報,2013,35(8):1875-1881. YAN Junkun,JIU Bo,LIU Hongwei,et al.Joint Cluster and Power Allocation Algorithm for Multiple Targets Tracking in Multistatic Radar Systems[J].Journal of Electronics&Information Technology,2013,35(8):1875-1881.
[2]嚴俊坤,夏雙至,戴奉周,等.異步多基地雷達系統目標跟蹤的功率分配算法[J].西安電子科技大學學報,2013,40 (6):32-40. YAN Junkun,XIA Shuangzhi,DAI Fengzhou,et al.Power Allocation Strategy for Target Tracking in Asynchronous Multistatic Radar Systems[J].Journal of Xidian University,2013,40(6):32-40.
[3]NARYKOV A S,KRASNOV O A,YAROVOY A.Algorithm for Resource Management of Multiple Phased Array Radars for Target Tracking[C]//2013 International Conference on Information Fusion.Piscataway:IEEE,2013: 1258-1264.
[4]SEOK J W,ZHAO J X,SELVAKUMAR J.Radar Resource Management:Dynamic Programming and Dynamic Finite State Machines[C]//2013 European Control Conference.Washington:IEEE,2013:4100-4105.
[5]ZHAO J X,SEOK J W,SELVAKUMAR J.A Greedy Policy for Fleet-level Radar Resource Management[C]//2013 IEEE Conference on Decision and Control.Piscataway:IEEE,2013:3160-3165.
[6]NARYKOV A S,KRASNOV O A,YAROVOY A.Effectiveness-based Radar Resource Management for Target Tracking[C]//2014 International Radar Conference.Piscataway:IEEE,2014:1-5.
[7]程婷,何子述,唐婷,等.相控陣雷達自適應采樣周期算法研究[J].西安電子科技大學學報,2007,34(增刊): 116-119. CHENG Ting,HE Zishu,TANG Ting,et al.Research on Adaptive Update Interval Algorithms in Phased Array Radars[J].Journal of Xidian University,2007,34(S):116-119.
[8]陳怡君,羅迎,張群,等.基于認知ISAR成像的相控陣雷達資源自適應調度算法[J].電子與信息學報,2014,36(7): 1566-1572. CHEN Yijun,LUO Ying,ZHANG Qun,et al.Adaptive Scheduling Algorithm for Radar Based on Spares Aperture ISAR Imaging[J].Journal of Electronics&Information Technology,2014,36(7):1566-1572.
[9]張貞凱,汪飛,周建江,等.多目標跟蹤中自適應時間調度[J].航空學報,2011,32(3):522-530. ZHANG Zhenkai,WANG Fei,ZHOU Jianjiang,et al.Adaptive Time Resource Scheduling in Multi Object Tracking [J].Acta Aeronautica et Astronautica Sinica,2011,32(3):522-530.
[10]MATTHIESEN D J.Efficient Beam Scanning,Energy Allocation,and Time Allocation for Search and Detection[C]// IEEE International Symposium on Phased Array Systems and Technology.Piscataway:IEEE,2010:361-368.
[11]CHEN M Y,WANG L.Resource Management Algorithm Based on the Minimum Covariance Mean Deviation Criterion for Phased Array Radars[C]//2012 International Workshop on Microwave and Millimeter Wave Circuits and System Technology.Piscataway:IEEE,2012:1-4.
[12]LI W L,YUAN S,ZHANG Y J,et al.Efficient Anchor Power Allocation for Location-aware Networks[C]//IEEE International Conference on Communications.Piscataway:IEEE,2011:5963139.
(編輯:李恩科)
Time resource allocation strategy for single beam phased array radar
QIN Tong,DAI Fengzhou,LIU Hongwei,FANG Ming
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
In practical applications,single beam phased array radar can generate multiple directional beams and illuminate multiple targets,respectively.In this paper,we put forward a time-resource and the beamwidth-of-joint-management algorithm to save the time resources.This paper describes the tracking precision of the target with the probability density function,and the ranging and velocity precision of the measurement will influence the tracking error.This paper uses the method of optimization to allocate the dwell time and beam width for each target.Simulation results show that,compared with the traditional adaptive methods of resource management,the method in this paper will guarantee the tracking accuracy and save the time resources for traking targets effectively,and will increase the maximum number of the targets the radar can track with the same tracking accuracy.
phased array radar;radar resource management;beam width
TN953
A
1001-2400(2016)05-0001-05
10.3969/j.issn.1001-2400.2016.05.001
2015-07-28 網絡出版時間:2015-12-10
國家自然科學基金資助項目(61271291,61201285);國家杰出青年科學基金資助項目(61525105);新世紀優秀人才支持計劃資助項目(NCET-09-0630)
秦 童(1988-),男,西安電子科技大學博士研究生,E-mail:qin13@yeah.net.
網絡出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20151210.1529.002.html
猜你喜歡
江蘇安全生產(2023年1期)2023-02-08 05:58:38
資源節約與環保(2022年8期)2022-09-20 02:25:22
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
藝術品鑒(2020年7期)2020-09-11 08:04:44
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
當代貴州(2018年28期)2018-09-19 06:39:04
資源再生(2017年3期)2017-06-01 12:20:59
決策(2015年9期)2015-09-10 07:22:44