利用HAF-LVD特性的復雜運動目標ISAR成像算法
2016-11-23 13:45:58章建成
西安電子科技大學學報 2016年5期
關鍵詞:信號
呂 倩,蘇 濤,吳 凱,章建成
(西安電子科技大學雷達信號處理國家重點實驗室,陜西西安 710071)
利用HAF-LVD特性的復雜運動目標ISAR成像算法
呂 倩,蘇 濤,吳 凱,章建成
(西安電子科技大學雷達信號處理國家重點實驗室,陜西西安 710071)
在復雜運動目標的逆合成孔徑雷達成像中,由于轉動矢量的時變會產生方位向的高階相位項,導致方位成像的嚴重散焦,傳統的距離-多普勒算法和線性調頻模型已不再適用.因此,在建立逆合成孔徑雷達成像回波信號為立方相位信號形式的基礎上,提出了利用高階模糊函數-呂氏分布特性的逆合成孔徑雷達成像算法.首先,根據高階模糊函數和呂氏分布思想定義了雙延時參數化瞬時自相關函數,并利用變尺度操作去除耦合及快速傅里葉變換實現信號能量積累.然后,利用得到的高階模糊函數-呂氏分布完成運動參數的非搜索估計和目標逆合成孔徑雷達成像.由于引入可調整的縮放因子,該算法能夠在保證成像質量和運算效率的基礎上,有效避免譜模糊,靈活應對更加多變和惡劣的成像環境.仿真結果驗證了該算法的有效性.
逆合成孔徑雷達;立方相位信號;雙延時參數化瞬時自相關函數;變尺度操作;高階模糊函數-呂氏分布
近年來,逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)成像一直是成像領域的研究熱點[1-3].針對勻速旋轉目標,傳統的成像算法采用離散傅里葉變換進行方位向聚焦,實現距離-多普勒(Range Doppler,RD)成像.而對于復雜運動目標,由于轉動加速度以及轉動加加速度會造成各散射點方位向的多普勒頻率不再是線性變化,從而導致多普勒模糊,降低成像質量.因此,針對復雜運動目標的ISAR成像,筆者將方位回波信號建模為立方相位信號(Cubic Phase Signal,CPS)的形式[4-5].
在以往的ISAR成像算法中,呂氏分布(LV’s Distribution,LVD)方法[6]消除了信號參數的搜索過程,大大減小了計算量,改善了抗噪聲性能.但是,該方法是針對線性調頻(Linear Frequency Modulated,LFM)信號提出的,對含有高次項的立方相位信號參數估計并不適用.其他針對復雜運動目標的ISAR成像算法,如楔形時間調頻率分布(Keystone Time-Chirp Rate Distribution,KTCRD)[7],高階模糊函數(High-order Ambiguity Function,HAF)-立方相位函數的積分形式(Integrated form of Cubic Phase Function,ICPF)[8]及文獻[9]所提方法等,都取得了較好的成像效果.但是,HAF-ICPF算法使用逐個參數估計的方法,導致嚴重的誤差傳播效應,降低了抗噪聲性能;文獻[3,5,9]中所提方法,由于存在非均勻采樣,導致運算量明顯增大,不便于實時處理.而KTCRD算法雖然不含非均勻采樣,但是該類算法容易產生譜模糊.因此,此類算法都無法在性能和計算量上達到很好的平衡.
針對以上問題,筆者提出了一種新的ISAR成像方法.該方法在對雷達原始回波數據完成距離脈壓和運動補償后,首先結合HAF和LVD,定義一種雙延時參數化瞬時自相關函數(double lag Parametric Instantaneous Autocorrelation Function,dl-PIAF),然后,通過變尺度和快速傅里葉變換(Fast Fourier Transform,FFT)操作快速實現信號去耦處理和能量積累得到其HAF-LVD,進而實現ISAR成像.該算法能夠通過調整參數來適應不同的ISAR成像,并且計算量小,適合實時處理.最后,利用仿真數據對算法的有效性進行了驗證和分析.
1 復雜運動目標的ISAR回波信號模型
采用如文獻[4]中的信號模型.如圖1所示,圓心O為目標轉動中心,XYZ為笛卡爾坐標系.P(xp,yp,zp)為目標上的散射點,向量r為雷達視線方向(Line Of Sight,LOS)的單位向量,向量W為目標三維旋轉合成角速度,其中W可以分解為平行于r的向量Wr和垂直于r的向量We.向量We所產生的徑向移動可以引起多普勒變化,被稱為有效轉動向量.
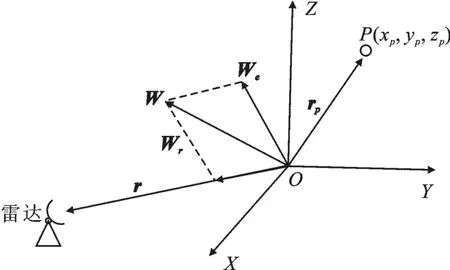
圖1 復雜運動目標ISAR成像模型
散射點P的線速度和對應的徑向分量分別為rp×We和(rp×We)·r,其中×和·分別表示外積和內積.假設目標的平動運動補償已完成,目標為轉臺模型,則散射點P的多普勒頻率為

其中,λ為波長.設wx,wy,wz分別為向量We在坐標軸XYZ上的投影.對于復雜運動目標,其有效轉動向量都是時變的,因此,可以對wx,wy,wz進行如下近似:

其中,tm代表方位慢時間,wx1,wx2,wx3,wy1,wy2,wy3,wz1,wz2,wz3分別為wx,wy,wz的常數項、一次項和二次項系數.且有W1=[wx1,wy1,wz1],W2=[wx2,wy2,wz2],W3=[wx3,wy3,wz3].在實際ISAR成像中,由于觀測時間較短(1~3 s),一般認為成像期間投影平面保持不變[3-4,8-9].因此,多普勒頻率可進一步近似為

其中,rx,ry,rz分別為向量r在坐標軸XYZ上的投影.令向量=[yprz-zpry,zprx-xprz,xpry-yprx]T,則散射點P到雷達由目標轉動所引起的距離變化量為

脈沖壓縮后,方位回波信號有如下形式:


其中,B為發射信號帶寬.轉動運動補償[10]后,為方便分析,假設某個特定距離單元的回波信號為

2 針對CPS的非搜索參數估計算法
文獻[8]提出的算法首先利用HAF將CPS信號進行降冪成為LFM信號,再利用立方相位函數的積分形式(ICPF)估計LFM的調頻率.具體如下,假設

結合HAF對該CPS進行降冪,有

其中,τ1為延時常數,且.明顯可以看出,y(n;τ1)具有LFM信號的形式.根據文獻[8]中的算法,得到其HAF-ICPF如下式:

可以看出,該算法是依次估計各項系數的,會產生誤差傳播,增加不必要的運算量.然而,在對CPS信號進行一次相位微分后,CPS信號已然變為LFM信號,此時便可以應用LFM參數估計算法.文獻[6]所提出的LVD算法,相比于改進的Wigner-Ville分布(Modified Wigner-Ville Distribution,MWVD)[11]等其他LFM參數估計算法,不僅在分辨率和抗噪聲性能方面都有一定的改進,并且提出了非搜索的概念,因此,受到廣泛的關注.這里,將其引用到CPS信號的參數估計中.將式(8)代入文獻[6]中定義的自相關函數,得到dl-PIAF,

其中,*代表復數共軛,m表示延時變量,τ2代表延時常數.將式(7)和式(8)繼續代入后,得到

對式(11)關于延時變量m進行FFT運算,得到其Wigner-Ville分布(Wigner-Ville Distribution,WVD),有

從式(12)可以發現,變量n和m之間存在耦合,導致WWVD(n,fm)沿斜線分布,并且該CPS的調頻率和二次調頻率與該斜線的斜率和截距有關.但是,該斜線的參數估計需要二維搜索過程來完成,這會大大增加運算量以及降低估計精度.這里,引用與文獻[6-7]類似的變尺度操作來消除變量n和m之間的線性耦合.該變尺度操作可以利用SFT-IFFT算法快速實現,因此可以有效提高運算效率.其具體執行步驟可參考文獻[12],這里不再介紹.對式(11)使用變尺度操作后,有

其中,ε=4τ1,η=4τ1τ2,ε,η為縮放因子,Ψ為信號相對幅度.然后,分別關于變量l,m進行FFT操作,得到HAF-LVD,即

可以發現,WHAF-LVD(fl,fm)存在惟一的峰值點(ε?2,η?3),因此,CPS的調頻率和二次調頻率估計可以通過峰值檢測方式實現.其他參數同樣可以利用FFT以及峰值檢測方式完成估計.
3 利用HAF-LVD特性的ISAR成像算法
在對多分量CPS進行參數估計時,需要引用Clean技術[13]來對不同強度的CPS進行分離.基于HAF-LVD的ISAR成像算法的流程如圖2所示,具體實現步驟如下:
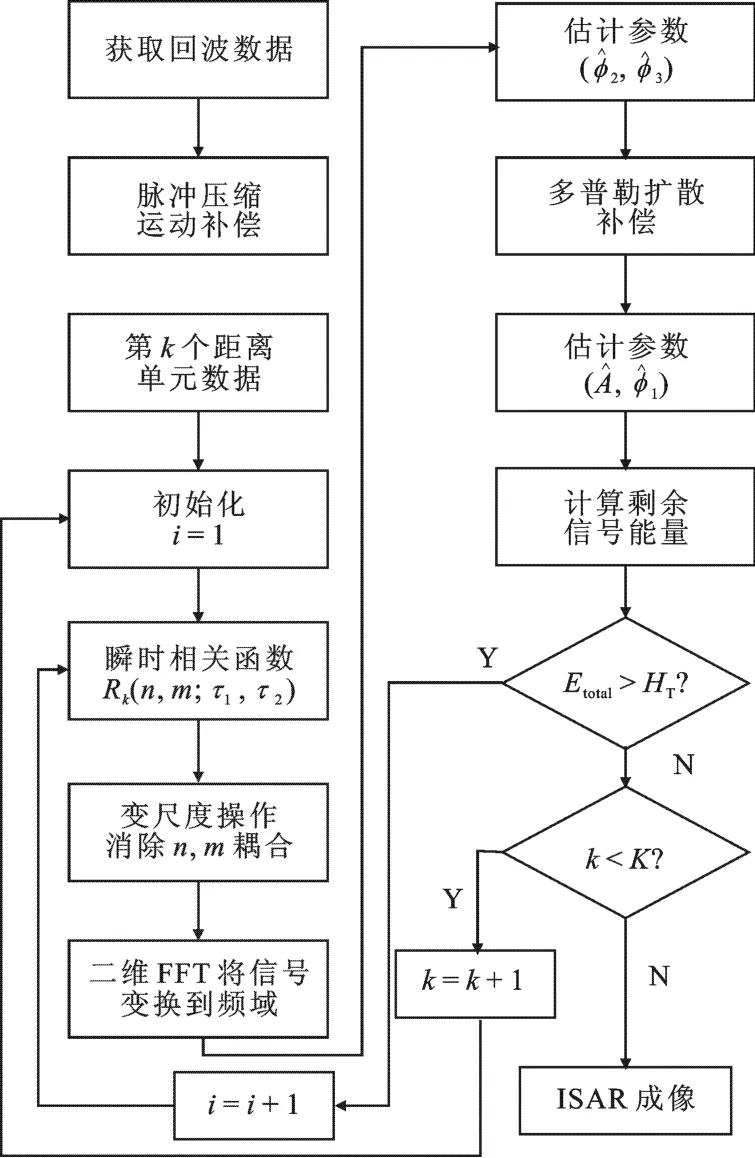
圖2 筆者提出的ISAR成像算法流程圖
步驟1 對原始回波信號進行距離脈沖壓縮和運動補償,將所有目標散射點都校正到正確的距離單元,得到第k個距離單元的數據sk(n).
步驟2 對得到的數據sk(n)運用HAF-LVD算法有

其中,Dk,cross代表交叉項結果,TST為變尺度操作(Scale Transform,ST).則有

步驟3 利用已估參數構造補償函數,然后利用FFT估計其他參數估計.

步驟4 從原始信號sk(n)中剔除步驟3中已估計的信號,有

步驟5 重復步驟2~4,直到i=Q,或信號剩余信號的能量少于HT(HT為能量門限).
步驟6 更新k=k+1,重復步驟2~5,直到k=K(K為距離單元總數).
4 仿真分析
4.1HAF-LVD分析
根據文獻[7]中所提算法,對于離散信號s(n),有

從式(19)可看出,文獻[7]所提的KTCRD算法只是針對特定的耦合問題,是HAF-LVD算法的一個特例.而筆者所提的HAF-LVD算法具有更加廣泛的應用范圍.根據式(14)可知,HAF-LVD算法的調頻率?2和二次調頻率?3的估計范圍分別為

其中,ε=4τ1,η=4τ1τ2,FPR為脈沖重復頻率.
從式(20)中可以看出,?2,?3的估計范圍與縮放因子ε,η和雷達脈沖重復頻率相關,而在實際中,雷達參數通常是固定的,因此延時常數τ1,τ2直接決定著?2,?3的估計范圍.當?2或?3的真實值超出其估計范圍,便會產生嚴重的譜模糊,進而導致錯誤估計.在ISAR成像中,方位向回波的調頻率和二次調頻率分別由有效轉動向量和目標尺寸決定.那么,在目標尺寸較大或者極端惡劣(高機動的散射點)的情況下,KTCRD算法的?2,?3估計范圍是固定的,而HAF-LVD算法的?2,?3估計范圍分別為是可調的,可知,HAF-LVD算法可以靈活地實時調整縮放因子來避免譜模糊的發生,而 KTCRD算法卻不能.下面用仿真來證明.設FPR=256 Hz,方位信號長度N=512,KTCRD算法中?2,?3的估計范圍分別為[±128 Hz/s,±512 Hz/s2].
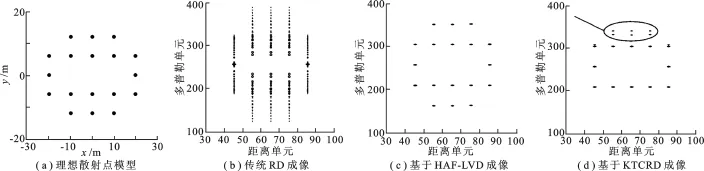
圖3 理想散射點仿真結果
由于不同的轉動加速度和轉動加加速度,導致不同程度的多普勒變化,假設有效轉動加速度和轉動加加速度分別為(0.14 rad/s2,0.08 rad/s3),LOS單位向量r=[1,0,0].根據雷達參數及圖3中散射點位置可計算出,?2max=168 Hz/s,?3max=96 Hz/s2.此時HAF-LVD算法可以靈活選取τ1=N/16,τ2=N/4,相應的縮放因子ε=0.5,η=0.25來滿足?2,?3的估計范圍(±256 Hz/s,±512 Hz/s2).從圖3(c),(d)的仿真結果可看出,HAF-LVD算法通過靈活選取參數來應對不同的參數估計要求,從而得到了很好的成像效果,而KTCRD算法由于不能達到目標的參數范圍,從而導致錯誤估計.由此證明,相比于KTCRD算法,HAFLVD算法能夠靈活地控制參數估計的范圍,有效避免譜模糊;縮放因子的選擇將直接影響HAF-LVD算法的實用性.
同樣,根據式(14)有,縮放因子也與參數的估計精度有關,過小的縮放因子會導致過低的估計精度.因此,縮放因子的選擇對高分辨高質量的ISAR成像至關重要.這里假設的未知參數?3的取值范圍為Φ,其中Φ由雷達參數、目標尺寸和目標相對于雷達的運動參數等共同決定.因此,根據式(14)~(16),,則縮放因子可設為η≤FPR(2Φ),ε的選取類似.在實際的ISAR成像中,有關縮放因子的選取規則可根據實際情況去調整.
4.2仿真數據ISAR成像分析
為了更清楚地驗證筆者所提算法的有效性,這里分別用基于HAF-ICPF的ISAR成像算法、基于KTCRD的ISAR成像算法與筆者所提的基于HAF-LVD的ISAR成像算法對合成的復雜運動目標進行ISAR成像.
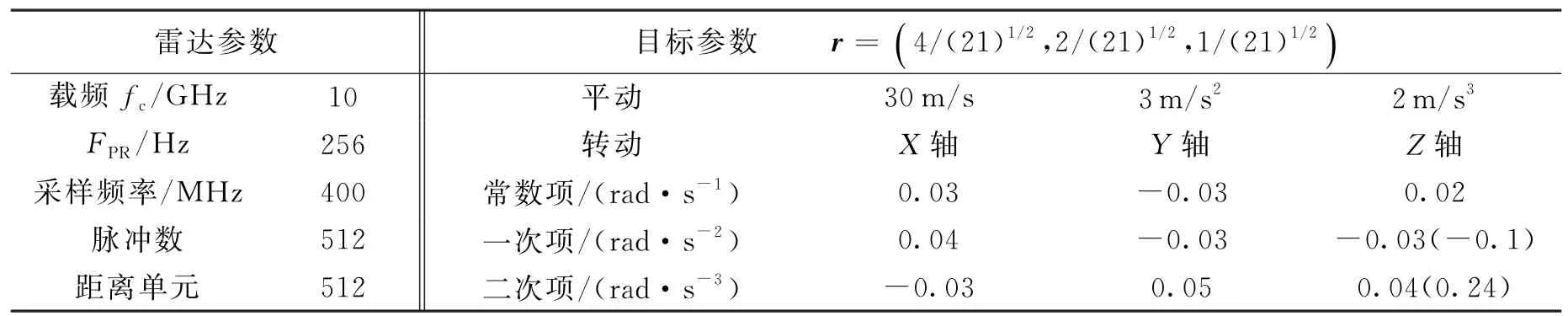
表1 仿真參數
圖4(a)為合成飛機模型,成像之前數據的信噪比為-4 dB.圖4(b)為仿真1(表1中原始仿真參數)的成像結果,可以看出,由于多普勒擴散的存在,方位向出現了嚴重散焦,導致成像質量下降.圖4(c)為仿真2(表1中括號內的值,其他參數不變)的成像結果.這里以飛機機翼上的散射點P(-9.6,30,0)為例進行分析.仿真1中,對于點P有?p,2=67 Hz/s,?p,3=77 Hz/s2,仿真2中改變參數后有?p,2=192 Hz/s,?p,3=435 Hz/s2.已知HAF-ICFP算法,KTCRD算法和HAF-LVD算法在上述參數設置下,其?2,?3的估計范圍分別為(±256 Hz/s,±256 Hz/s2),(±128 Hz/s,±512 Hz/s2),(±256 Hz/s,±512 Hz/s2).可明顯看出,在仿真1中,點P的真實值均處于3種算法的參數估計范圍以內,因此,圖4(b)均可以很清楚地重構出完整的飛機模型;而在仿真2中,由于部分散射點(如P)的真實值已超出HAF-ICFP算法或KTCRD算法的參數估計范圍(如?p,2超出了KTCRD中?2的估計范圍,而?p,3超出了HAF-ICFP中?3的估計范圍),正如圖4(c)所示,在KTCRD算法和HAF-ICFP算法均出現了錯誤的估計值,導致基于KTCRD算法和基于HAF-ICFP算法的ISAR成像中,部分散射點位置模糊,無法正確重建.因此,圖4(c3)~(c4)中飛機的兩翼均出現了不同程度的模糊,導致兩翼已無法準確識別.

圖4 飛機模型及不同參數設置下基于不同算法的ISAR成像結果

表2 計算量分析
另外,HAF-LVD算法利用了基于Chirp-Z變換的變尺度操作來消除變量間耦合,其計算量為O(N2lb N).KTCRD算法只是HAF-LVD算法的特例(當τ1=τ2),故其計算量也是O(N2lb N).然而,由于HAF-ICPF算法涉及到非均勻采樣的離散Fourier變換[8](見式(9)),計算量高達O(N3).表2中給出了圖4(b2)~(b4)這3種算法的仿真計算量分析.可以看出,雖圖4(b2)~(b4)均完整地恢復出飛機結構,但與基于HAF-ICPF的ISAR成像算法相比,圖4(b2)計算量和仿真時間明顯減少.因此,與KTCRD算法和HAF-ICPF算法相比,基于HAF-LVD的ISAR成像算法在成像質量和處理速度上都有著明顯的優勢.
5 結束語
針對傳統成像模型和算法不再適用于復雜運動目標的ISAR成像問題,筆者提出了一種利用HAFLVD特性的復雜運動目標ISAR成像算法.該算法首先根據HAF和LVD算法定義出新的相關函數dl-PIAF,然后,通過變尺度操作消除了變量間的線性耦合,把時頻平面上的斜線分布校正成沿時間軸的直線分布,并利用FFT分別沿時間軸和偽時間軸對信號進行能量積累.最后,重構成像數據.該算法通過引入可調整的縮放因子,可以有效避免譜模糊問題,靈活應對不同的成像環境,并且在運算量和成像質量方面達到均衡.仿真結果證明了該方法的有效性和實用性.
[1]ZHANG S,ZHANG W,ZONG Z,et al.High-Resolution Bistatic ISAR Imaging Based on Two-dimensional Compressed Sensing[J].IEEE Transactions on Antennas and Propagation,2015,63(5):2098-2111.
[2]劉亞波,李軍,李亞超,等.解線頻調步進頻率ISAR成像研究[J].西安電子科技大學學報,2010,37(3):469-475. LIU Yabo,LI Jun,LI Yachao,et al.Study on Dechirp SF ISAR Imaging[J].Journal of Xidian University,2010,37 (3):469-475.
[3]WANG Y,JIANG Y.Inverse Synthetic Aperture Radar Imaging of Maneuvering Target Based on the Product Generalized Cubic Phase Function[J].IEEE Geoscience and Remote Sensing Letters,2011,8(5):958-962.
[4]LI Y,WU R,XING M,et al.Inverse Synthetic Aperture Radar Imaging of Ship Target with Complex Motion[J]. IET Radar,Sonar&Navigation,2008,2(6):395-403.
[5]WANG Y,ZHAO B.Inverse Synthetic Aperture Radar Imaging of Nonuniformly Rotating Target Based on the Parameters Estimation of Multicomponent Quadratic Frequency-modulated Signals[J].IEEE Sensors Journal,2015,15(7):4053-4061.
[6]LV X,BI G,WAN C,et al.Lv's Distribution:Principle,Implementation,Properties,and Performance[J].IEEE Transactions on Signal Processing,2011,59(8):3576-3591.
[7]ZHENG J,SU T,ZHU W,et al.ISAR Imaging of Targets with Complex Motions Based on the Keystone Time-chirp Rate Distribution[J].IEEE Geoscience and Remote Sensing Letters,2014,11(7):1275-1279.
[8]WANG Y.Inverse Synthetic Aperture Radar Imaging of Manoeuvring Target Based on Range-instantaneous-Doppler and Range-instantaneous-chirp-rate Algorithms[J].IET Radar,Sonar&Navigation,2012,6(9):921-928.
[9]BAI X,TAO R,WANG Z,et al.ISAR Imaging of a Ship Target Based on Parameter Estimation of Multicomponent Quadratic Frequency-modulated Signals[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(2): 1418-1429.
[10]楊磊,熊濤,張磊,等.應用聯合自聚焦實現低信噪比ISAR成像運動補償[J].西安電子科技大學學報,2012,39 (3):63-69. YANG Lei,XIONG Tao,ZHANG Lei,et al.Translational Motion Compensation for ISAR Imaging Based on Joint Autofocusing under Low SNR[J].Journal of Xidian University,2012,39(3):63-69.
[11]XING M,WU R,LI Y,et al.New ISAR Imaging Algorithm Based on Modified Wigner-Ville Distribution[J].IET Radar,Sonar&Navigation,2009,3(1):70-80.
[12]LV X,XING M,WAN C,et al.ISAR Imaging of Maneuvering Targets Based on the Range Centroid Doppler Technique[J].IEEE Transactions on Image Processing,2010,19(1):141-153.
[13]MARTORELLA M,ACITO N,BERIZZI F.Statistical CLEAN Technique for ISAR Imaging[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(11):3552-3560.
[14]ZHENG J,SU T,ZHANG L,et al.ISAR Imaging of Targets with Complex Motion Based on the Chirp Rate-Quadratic Chirp Rate Distribution[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(11): 7276-7289.
(編輯:李恩科)
ISAR imaging algorithm for targets with the complex motion based on the high-order ambiguity function-Lv’s distribution
LüQian,SU Tao,WU Kai,ZHANG Jiancheng
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
In ISAR imaging for targets with the complex motion,since the azimuth high order phase terms caused by the time-varying rotation vector will deteriorate the azimuth focusing quality,the traditional RD algorithm and LFM model are not appropriate.Thereby,in the case when the
signal can be modeled as cubic phase signals(CPSs),this paper proposes an ISAR imaging algorithm based on HAFLVD(high-order ambiguity function-Lv’s distribution).First,this algorithm defines a novel double lag parametric instantaneous autocorrelation function,and then applies the scaling operator to remove the coupling and utilizes FFT to achieve the energy accumulation.Finally,the non-searching estimation of the moving parameter and the ISAR images for targets are accomplished by the obtained HAF-LVD.Because of the introduction of the scaling factor,this algorithm can flexibly deal with more changeful and hostile ISAR environment without loss of the anti-noise performance and computational efficiency.Simulation results validate the effectiveness of the ISAR imaging approach.
inverse synthetic aperture radar;cubic phase signal;double lag parametric instantaneous autocorrelation function;scaling operator;high-order ambiguity function-Lv’s distribution (HAF-LVD)
TN957.52
A
1001-2400(2016)05-0024-07
10.3969/j.issn.1001-2400.2016.05.005
2015-06-30 網絡出版時間:2015-12-10
國家自然科學基金資助項目(61271024,61201283);新世紀優秀人才支持計劃資助項目(NCET-09-0630)
呂 倩(1991-),女,西安電子科技大學博士研究生,E-mail:lvqian@stu.xidian.edu.cn.
網絡出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20151210.1529.010.html
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06