衛(wèi)星定位軟件接收機(jī)研究綜述
2016-11-25 03:41:43張鵬娜曾慶喜祝雪芬
河北科技大學(xué)學(xué)報(bào) 2016年3期
張鵬娜,曾慶喜,祝雪芬,裴 凌
(1.南京航空航天大學(xué)車輛電子研究中心,江蘇南京 210016;2.東南大學(xué)儀器科學(xué)與工程學(xué)院,江蘇南京 210096;3.上海交通大學(xué)北斗導(dǎo)航與位置服務(wù)上海市重點(diǎn)實(shí)驗(yàn)室,上海 200240)
?
衛(wèi)星定位軟件接收機(jī)研究綜述
張鵬娜1,曾慶喜1,祝雪芬2,裴 凌3
(1.南京航空航天大學(xué)車輛電子研究中心,江蘇南京 210016;2.東南大學(xué)儀器科學(xué)與工程學(xué)院,江蘇南京 210096;3.上海交通大學(xué)北斗導(dǎo)航與位置服務(wù)上海市重點(diǎn)實(shí)驗(yàn)室,上海 200240)
軟件接收機(jī)憑借其良好的通用性、靈活性及較好的定位性能已成為衛(wèi)星定位接收機(jī)領(lǐng)域的一個(gè)研究熱點(diǎn)。系統(tǒng)闡述了軟件接收機(jī)的結(jié)構(gòu)特點(diǎn)及國內(nèi)外研究現(xiàn)狀,對比分析了基于PC,DSP(digital signal processor),F(xiàn)PGA(field programmable gate array)以及FPGA+DSP平臺的軟件接收機(jī)的結(jié)構(gòu)和性能,指出基于FPGA+DSP,DSP的實(shí)現(xiàn)方式更利于發(fā)揮軟件接收機(jī)的優(yōu)點(diǎn),可使軟件接收機(jī)真正走向?qū)嵱没詈蠼o出了軟件接收機(jī)技術(shù)未來的發(fā)展方向和其在無人駕駛技術(shù)中的應(yīng)用前景,為軟件接收機(jī)的研究和應(yīng)用提供理論參考。
無線通信技術(shù);衛(wèi)星定位;軟件接收機(jī);DSP/FPGA;研究現(xiàn)狀
GNSS系統(tǒng)主要由GPS(global position system)、Glonass,Galileo和北斗衛(wèi)星導(dǎo)航系統(tǒng)以及相關(guān)增強(qiáng)系統(tǒng)組成,具有全天候、高精度、實(shí)時(shí)連續(xù)性等特點(diǎn),現(xiàn)已廣泛應(yīng)用于交通運(yùn)輸、航空航海、緊急救援等領(lǐng)域。衛(wèi)星定位接收機(jī)可接收視界內(nèi)的衛(wèi)星播發(fā)的衛(wèi)星信號并通過解調(diào)解算為用戶提供位置及導(dǎo)航信息。由于新的衛(wèi)星導(dǎo)航信號陸續(xù)出現(xiàn),并且接收機(jī)信號處理算法也在不斷地改進(jìn),現(xiàn)有的衛(wèi)星定位接收機(jī)需要不斷地更新?lián)Q代,更改硬件結(jié)構(gòu)以適應(yīng)和更好地接收各種類型的衛(wèi)星信號,這給接收機(jī)的設(shè)計(jì)者和用戶都帶來了很大的不便。因此,一種在不改變硬件的條件下,通過更換內(nèi)部的軟件就可以實(shí)現(xiàn)性能升級的新型接收機(jī)即軟件接收機(jī),成為接收機(jī)設(shè)計(jì)方面的研究熱點(diǎn)。軟件接收機(jī)基于通用嵌入式平臺,可深入到接收機(jī)信號通道內(nèi)部控制衛(wèi)星信號的處理過程[1],具有良好的開放性,現(xiàn)已成為未來定位接收機(jī)的一個(gè)發(fā)展方向,國內(nèi)外對軟件接收機(jī)研究的熱度也一直有增無減。
1 軟件接收機(jī)結(jié)構(gòu)及特點(diǎn)
衛(wèi)星定位軟件接收機(jī)將“軟件無線電”的概念引入到了衛(wèi)星定位接收機(jī)中,在接收機(jī)中使ADC(analog to digital converter)在盡量接近天線的地方把信號數(shù)字化,然后使用軟件來處理數(shù)字信號實(shí)現(xiàn)定位[2]。軟件接收機(jī)與硬件接收機(jī)結(jié)構(gòu)的區(qū)別見圖1。
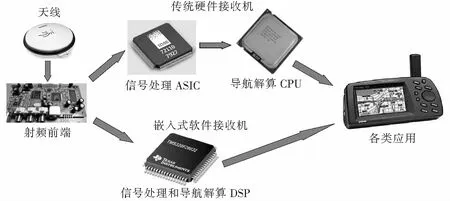
圖1 硬件接收機(jī)和軟件接收機(jī)結(jié)構(gòu)的區(qū)別Fig.1 Structure difference of hardware receiver and software receiver
衛(wèi)星定位軟件接收機(jī)主要是由天線、射頻前端以及基帶信號處理3部分組成,其結(jié)構(gòu)如圖2所示。

圖2 衛(wèi)星定位軟件接收機(jī)結(jié)構(gòu)Fig.2 Structure of GNSS software receiver
利用天線接收衛(wèi)星發(fā)射的射頻信號,即將衛(wèi)星發(fā)射的L波段的電磁波轉(zhuǎn)換成便于后續(xù)處理的電信號。射頻前端通過對天線接收到的微弱射頻信號進(jìn)行放大、下變頻,輸出頻率較低的中頻模擬信號,然后經(jīng)過A/D轉(zhuǎn)換模塊獲得數(shù)字化的中頻信號,并將該信號傳給后續(xù)的基帶數(shù)字信號處理部分。基帶數(shù)字信號處理是接收機(jī)的核心,通過依次完成對中頻信號的捕獲、跟蹤、解調(diào)解算獲得衛(wèi)星的導(dǎo)航電文,然后利用導(dǎo)航電文計(jì)算出用戶位置信息。基于PC通用CPU的軟件接收機(jī),由電腦的主處理器完成信號的解調(diào)解擴(kuò)及定位解算;基于嵌入式平臺的軟件接收機(jī),由主芯片(如DSP,F(xiàn)PGA)完成對基帶信號的處理。
軟件接收機(jī)具有如下特點(diǎn)[3-5]。
1)更好的通用性 軟件接收機(jī)除射頻前端部分是用硬件來實(shí)現(xiàn)之外,其他所有的功能都是由軟件來實(shí)現(xiàn)的。由于使用了很少的硬件,使得其相對于傳統(tǒng)的接收機(jī)具有更高的通用性,可以兼容多星座、多頻段和多體制的信號。同時(shí)由于減少了所使用的硬件,這種接收機(jī)在制造成本、性能、尺寸、質(zhì)量和功耗等方面具有很大的優(yōu)勢。
2)更好的定位性能 目前傳統(tǒng)接收機(jī)的信號處理功能都是通過使用特定的硬件ASIC(application specific integrated circuit)來實(shí)現(xiàn)的,由于硬件資源的限制,無法實(shí)現(xiàn)過于復(fù)雜的算法,而軟件接收機(jī)利用軟件來實(shí)現(xiàn)基帶部分的算法,即可以通過開發(fā)更復(fù)雜的優(yōu)化算法來提高其在多信號融合、高靈敏度、高精度、抗干擾和多路徑抑制等方面的性能,這使得軟件接收機(jī)在定位性能方面比傳統(tǒng)的接收機(jī)具有更大的優(yōu)勢。
3)更容易實(shí)現(xiàn)性能升級 由于傳統(tǒng)的硬件接收機(jī)采用ASIC芯片進(jìn)行信號處理,如果要對這種接收機(jī)進(jìn)行性能升級,只能重新設(shè)計(jì)ASIC芯片,在設(shè)計(jì)成本和設(shè)計(jì)周期方面的代價(jià)都很高。而軟件接收機(jī)適合各種采樣頻率的數(shù)據(jù),不需要做任何硬件的改動,通過加載不同的軟件即可實(shí)現(xiàn)不同的功能,只需要更換接收機(jī)中的軟件便可以實(shí)現(xiàn)接收機(jī)的性能升級。
2 軟件接收機(jī)發(fā)展現(xiàn)狀
軟件接收機(jī)可以利用各種算法來提高接收機(jī)的定位性能,但是由于需要對大量的數(shù)據(jù)進(jìn)行實(shí)時(shí)運(yùn)算,需要CPU具有很強(qiáng)的處理能力和很大的數(shù)據(jù)存儲空間。這使得目前的GPS軟件接收機(jī)多是利用PC機(jī)的通用CPU[6-8]甚至GPU(graphic processing unit)進(jìn)行處理,可以在不考慮硬件資源的情況下研究軟件接收機(jī)高性能算法,可為軟件接收機(jī)嵌入式實(shí)現(xiàn)提供理論研究基礎(chǔ)。嵌入式系統(tǒng)與PC機(jī)相比,數(shù)據(jù)存儲容量和處理速度都非常有限,其對算法復(fù)雜性和計(jì)算量要求較高。但其具有較好的靈活性,成本較低,便于安裝,有利于衛(wèi)星定位軟件接收機(jī)真正走向?qū)嵱没1疚陌凑湛臻g上從國外到國內(nèi)、時(shí)間上由遠(yuǎn)及近的順序分析基于PC和基于嵌入式平臺的軟件接收機(jī)的研究現(xiàn)狀。
2.1 基于PC的衛(wèi)星定位接收機(jī)研究現(xiàn)狀
國外對于軟件接收機(jī)的研究起步較早,1995年Clifford Kelley 博士設(shè)計(jì)了第1款真正意義上的GPS 軟件接收機(jī),并且在2001年將該軟件接收機(jī)作為開源項(xiàng)目對外公開;2000年美國TSUIJ[2]出版了第1本基于軟件無線電思想的GPS軟件接收機(jī)著作。在這本書中, TSUIJ系統(tǒng)介紹了GPS系統(tǒng)的星座組成及衛(wèi)星信號結(jié)構(gòu),詳細(xì)闡述了軟件接收機(jī)的硬件設(shè)計(jì)和基帶信號處理算法,可為初學(xué)者提供入門參考資料;美國Stanford 大學(xué)和瑞典Luleake科技大學(xué)于2000年合作設(shè)計(jì)并實(shí)現(xiàn)了基于高級語言的GPS L1四通道實(shí)時(shí)軟件接收機(jī)gpSrx,該軟件接收機(jī)從計(jì)算量較大的相關(guān)器到信號的跟蹤及解算均由運(yùn)行在X-86芯片上的軟件完成[9];2001年該實(shí)驗(yàn)室又對基于X-86的GPS軟件接收機(jī)算法進(jìn)行了改進(jìn),使用了基于FFT的循環(huán)卷積方法達(dá)到了次秒級的捕獲速度,同時(shí)改進(jìn)導(dǎo)航解算算法,使定位誤差減小到了30 m以內(nèi)[10]。由此可見,軟件接收機(jī)可通過修改內(nèi)部程序改進(jìn)基帶信號處理算法,無需對硬件結(jié)構(gòu)進(jìn)行更改即可實(shí)現(xiàn)性能和速度的升級,具有較強(qiáng)的靈活性;2003年美國Cornell大學(xué)LEDVINA等[11]設(shè)計(jì)開發(fā)了一款單頻實(shí)時(shí)GPS軟件接收機(jī)并對其性能進(jìn)行了測試。該軟件接收機(jī)基于主頻為 1.73 GHz的通用PC CPU,實(shí)現(xiàn)了12通道實(shí)時(shí)處理,其結(jié)構(gòu)框圖如圖3所示。
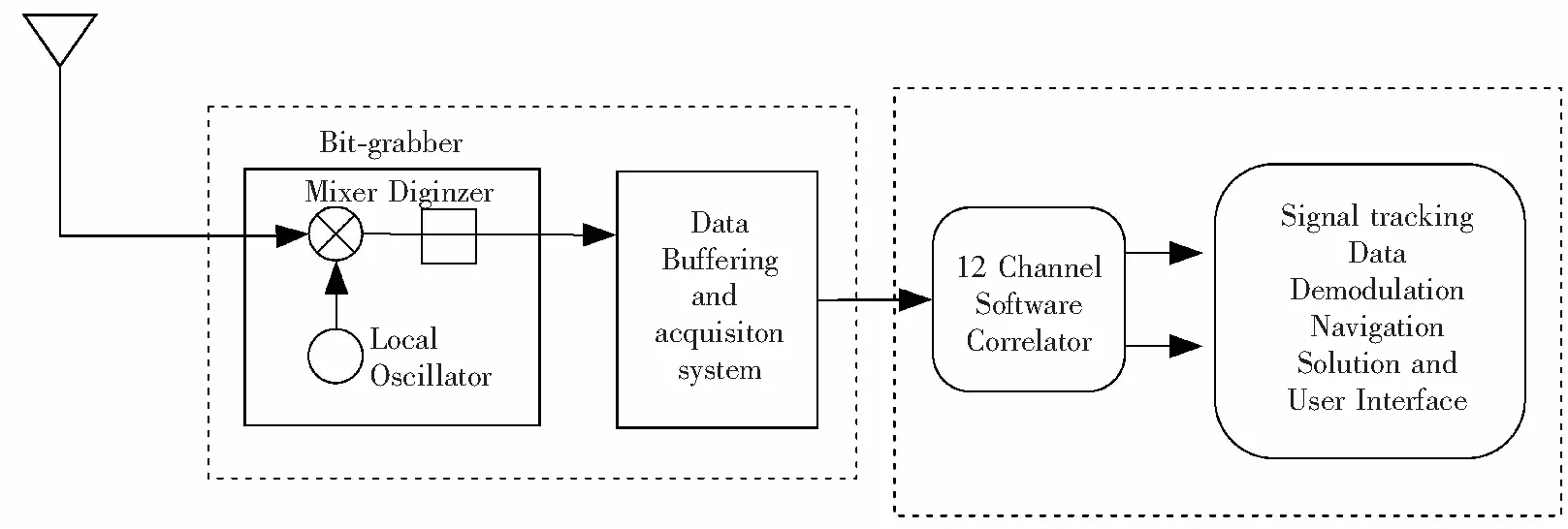
圖3 軟件接收機(jī)結(jié)構(gòu)框圖Fig.3 Structure diagram of software receiver
與硬件接收機(jī)不同,該軟件接收機(jī)使用了純軟件相關(guān)器,并引入了新的算法使處理器按照整個(gè)“字”操作對每個(gè)數(shù)據(jù)“位”進(jìn)行計(jì)算,實(shí)現(xiàn)了數(shù)據(jù)的并行處理,加快了信號處理速度;2004年,該項(xiàng)目組又設(shè)計(jì)開發(fā)了一款GPS L1/L2 C雙頻民用10通道實(shí)時(shí)軟件接收機(jī),這個(gè)雙頻的接收機(jī)運(yùn)行在Linux實(shí)時(shí)操作系統(tǒng)上,處理器是主頻為3.2 GHz的INTEL Pentium 4,接收機(jī)全速運(yùn)行時(shí)大約占用CPU 80%的處理能力,能同時(shí)對10個(gè)通道進(jìn)行實(shí)時(shí)跟蹤[7];2009年丹麥Aalborg大學(xué)的丹麥GPS中心研制出了基于E5000軟件的GPS接收機(jī),由于使用軟件代替了傳統(tǒng)的GPS基帶硬件集成電路,故該GPS軟件接收機(jī)只需在PC或DSP上運(yùn)行軟件就可以實(shí)現(xiàn)定位[12];2013年JAVIER等[13]也基于PC對GPS+Galileo雙星座軟件接收機(jī)進(jìn)行了研究;JUANG等[14]在PC上使用C/C++語言實(shí)現(xiàn)了北斗軟件接收機(jī),可接收北斗衛(wèi)星信號并進(jìn)行實(shí)時(shí)處理,最終定位誤差在30 m左右,距離真正實(shí)用還存在一定差距;芬蘭的ZAHIDUL等[15]在PC上實(shí)現(xiàn)了北斗軟件接收機(jī),其通過天線采集到2組北斗B1信號并存儲到PC中,然后由運(yùn)行在PC上的軟件接收機(jī)對信號進(jìn)行處理得到最終定位結(jié)果,其水平和垂直定位誤差分別為4.66,4.88 m和5.94,9.74 m;Loctronix公司的MATHEWS等[16]研究了一款高性能的GNSS軟件接收機(jī),該接收機(jī)可在多平臺上運(yùn)行,能接收處理多種GNSS信號進(jìn)行定位解算,方便與其他傳感器信息進(jìn)行融合定位。以上這些研究都在不考慮嵌入式實(shí)現(xiàn)的前提下,基于PC機(jī)研制了各種高性能的衛(wèi)星定位軟件接收機(jī)。為了避免研究人員各自為戰(zhàn)及加速GNSS軟件接收機(jī)的發(fā)展及應(yīng)用,美國俄亥俄大學(xué)的GUNAWARDENA[17]于2013年9月撰文發(fā)布了一個(gè)用于大數(shù)據(jù)量快速處理的Matlab工具包,旨在為研究GNSS軟件接收機(jī)的用戶提供一個(gè)開放式的軟件平臺。該工具包使用高效率的低級計(jì)算機(jī)語言編寫,其結(jié)構(gòu)如圖4所示。
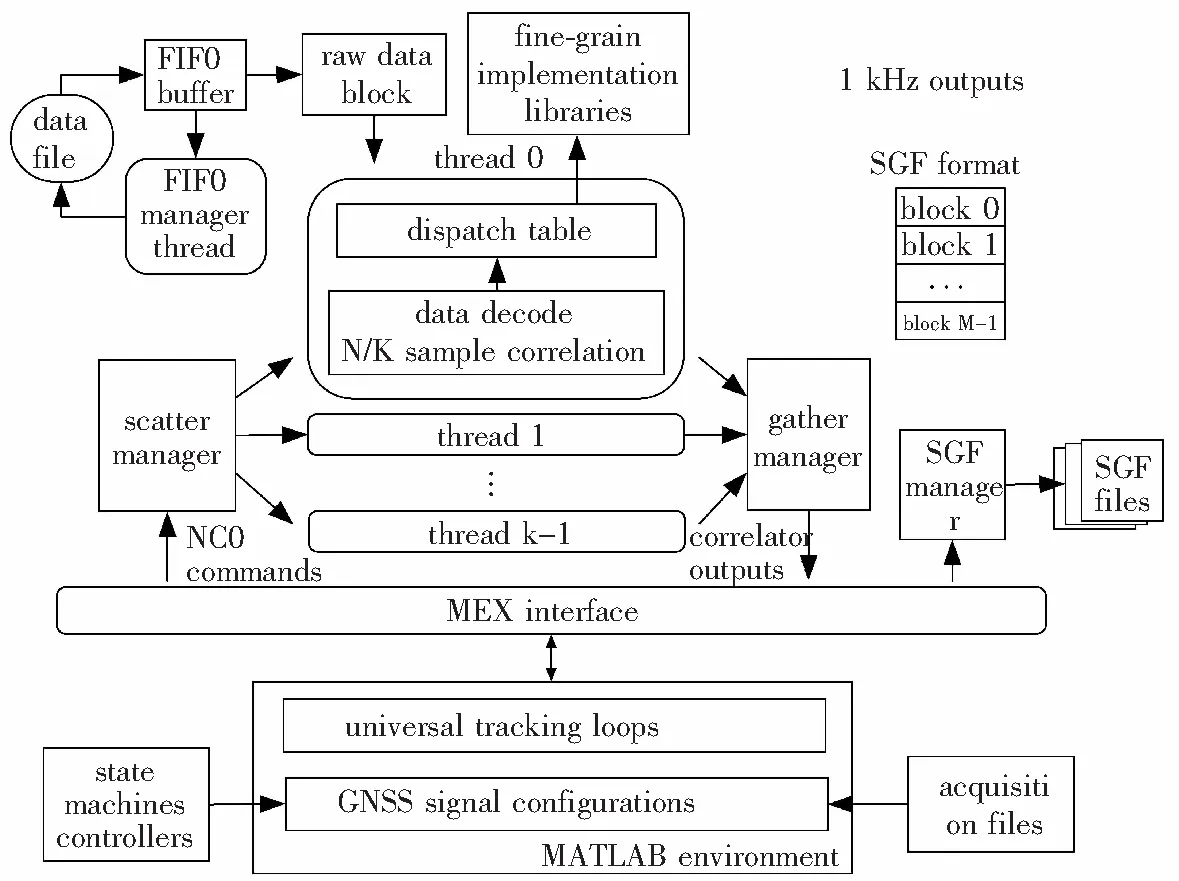
圖4 開源的Matlab工具包結(jié)構(gòu)圖Fig.4 Chart of open-source Matlab toolbox
該工具包支持各種RF前端或二進(jìn)制數(shù)據(jù)文件,能夠模擬產(chǎn)生多種GNSS信號。同時(shí),其優(yōu)化了相關(guān)器功能,最大程度地利用了主處理器的計(jì)算能力,能明顯減少程序運(yùn)行的時(shí)間。工具包可被Matlab調(diào)用,具有良好的人機(jī)交互界面,方便針對不同研究進(jìn)行不同配置,為世界各國的研究者們提供了一個(gè)完善的GNSS接收機(jī)基帶信號處理研究仿真平臺。該工具包深入到平臺底層,通過并行處理任務(wù)加快了信號處理速度,因此通過軟件合理利用硬件資源,調(diào)度各個(gè)任務(wù)處理進(jìn)程,能很大程度地加快軟件接收機(jī)運(yùn)行速度;2013年NAVSYS公司的BROWN等[18]將GNSS信號產(chǎn)生軟件與開源的軟件接收機(jī)相融合,通過運(yùn)行GRC(GNU radio companion,一個(gè)用來產(chǎn)生信號流程圖及流程圖源代碼的圖形化工具)軟件和可兼容的軟件接收機(jī),用戶能夠產(chǎn)生可用來記錄和回放的直觀的GNSS信號流。開源的GRC工具允許用戶根據(jù)需要抓取和回放信號;2014年日本的SUZUKI等[19]開發(fā)了一種新型的開源的GNSS軟件接收機(jī)——GNSS-SDRLIB,其運(yùn)行在PC上,由C語言編寫而成,能夠?qū)NSS信號進(jìn)行捕獲、跟蹤、導(dǎo)航信息解算、頻譜分析等工作,可處理各種RF前端接收到的導(dǎo)航信號,并輸出偽距、載波相位、多普勒頻移等信息。最終實(shí)驗(yàn)結(jié)果表明,其定位誤差可保持在2 m內(nèi);2015年P(guān)ARK等[20]基于多GPGPU(general purpose GPU)平臺開發(fā)了一款具有抗干擾性能的軟件接收機(jī),并通過建立跟蹤性能評估模型合理分配每個(gè)GPU的跟蹤處理任務(wù),減少了近60%的跟蹤處理時(shí)間。通過算法實(shí)現(xiàn)計(jì)算機(jī)資源的最優(yōu)利用,能大大加速軟件接收機(jī)的處理速度,因此在軟件接收機(jī)中算法的優(yōu)劣將直接決定接收機(jī)的性能;ARRIBAS等[21]設(shè)計(jì)完成了一個(gè)GNSS軟件接收機(jī)實(shí)驗(yàn)平臺,該平臺由通用的硬件平臺和開源的軟件構(gòu)成,能夠接收多種GNSS信號,便于開發(fā)人員進(jìn)行算法研究。經(jīng)過十多年的發(fā)展,基于PC的衛(wèi)星定位軟件接收機(jī)已經(jīng)從單頻GPS軟件接收機(jī)發(fā)展為當(dāng)下的多星座多信號的GNSS軟件接收機(jī),可為開發(fā)者提供良好的算法研究環(huán)境,便于高性能算法的仿真模擬。
中國對軟件接收機(jī)的研究相對國外的研究來說開始較晚。1998年北京航空航天大學(xué)張其善教授領(lǐng)導(dǎo)的課題組率先研制出了一臺在PC平臺上運(yùn)行的單頻GPS 軟件接收機(jī)樣機(jī)[22];2004年在美國留學(xué)的GPS高級軟件工程師魯郁[23]博士采用高級語言編寫了一套完整的GPS軟件接收機(jī)程序,并將其作為開源項(xiàng)目對外公布;2009年北京航空航天大學(xué)通信導(dǎo)航與測試實(shí)驗(yàn)室的JIN等[24]開發(fā)了基于軟件相關(guān)器的GPS軟件接收機(jī),該軟件接收機(jī)能夠在奔騰41.7 GHz的CPU上實(shí)現(xiàn)超過12通道的實(shí)時(shí)運(yùn)算;清華大學(xué)研制了一種基于高性能CPU和GPU處理器的多頻率實(shí)時(shí)軟件接收機(jī),可以在5 MHz的采樣率下同時(shí)對150個(gè)通道進(jìn)行實(shí)時(shí)跟蹤,使用的CPU是Intel的Xeon 5150,主頻為2.66 GHz,使用的GPU是Geforce的GTX285,速度為648 MHz[25];2010年復(fù)旦大學(xué)的趙晉[26]研究了基于“硬件模擬前端+FPGA+PC”架構(gòu)的北斗二代衛(wèi)星導(dǎo)航接收機(jī),由于當(dāng)時(shí)北斗B2信號標(biāo)準(zhǔn)尚未公布,文章只是利用假設(shè)信號對接收機(jī)捕獲、跟蹤算法做出了相應(yīng)改進(jìn),通過GPS信號驗(yàn)證了平臺的定位性能,最后實(shí)驗(yàn)結(jié)果表明該軟件接收機(jī)可滿足實(shí)時(shí)定位要求;2012年電子科技大學(xué)的羅正平[27]基于模塊化的思想用C語言實(shí)現(xiàn)了通用的衛(wèi)星信號處理模型。該模型可以根據(jù)用戶的配置完成BD2系統(tǒng)中各種衛(wèi)星信號的處理流程。測試結(jié)果表明,該模型可以實(shí)現(xiàn)用戶位置的計(jì)算,在特定的仿真條件下可以獲得較好的定位精度;2014年ZHANG等[28]在PC上設(shè)計(jì)實(shí)現(xiàn)了一個(gè)開源的L1/L2 C雙頻軟件接收機(jī),與已有的大部分接收機(jī)不同,該軟件接收機(jī)可接收GPS衛(wèi)星雙頻信號。使用外部時(shí)鐘作為RF前端的時(shí)鐘輸入提高了接收機(jī)的頻率穩(wěn)定性,且軟件設(shè)計(jì)程序完全開源,可為研究者提供技術(shù)參考;2015年XU等[29]設(shè)計(jì)了一款基于NVIDIA GeForce GTX 750 Ti GPU的軟件接收機(jī),其將一種基于GPU的捕獲和跟蹤結(jié)構(gòu)應(yīng)用到軟件接收機(jī)中,加速了信號的跟蹤處理過程。應(yīng)注意到的是,這些基于PC的研究雖均能實(shí)現(xiàn)軟件接收機(jī)功能,但均在不考慮硬件資源的情況下實(shí)現(xiàn)了復(fù)雜算法和大點(diǎn)數(shù)信號處理。當(dāng)在資源有限的嵌入式上實(shí)現(xiàn)時(shí),較低的時(shí)鐘頻率、有限的內(nèi)存空間和外部存儲將制約軟件接收機(jī)的處理速度和算法性能。因此,如何降低算法的空間復(fù)雜度和通過算法合理利用硬件資源成為軟件接收機(jī)真正走向?qū)嵱没年P(guān)鍵問題。
2.2 基于嵌入式硬件結(jié)構(gòu)的軟件接收機(jī)研究現(xiàn)狀
為了驗(yàn)證GPS軟件接收機(jī)也可在低功耗、資源有限的數(shù)字信號處理器上實(shí)現(xiàn),2001年AKOS等[10]選用Texas Instruments公司的TMS320C6201 DSP芯片為核心處理器,將軟件接收機(jī)代碼移植到該平臺上進(jìn)行定位解算。與X-86芯片相比,6201芯片時(shí)鐘頻率較低,數(shù)據(jù)存儲空間有限,僅有2片32 KB的數(shù)據(jù)存儲空間和一個(gè)64 KB的程序儲存空間。32 KB的存儲空間容量較小,將限制GPS信號的處理速度。64KB的程序內(nèi)存無法全部存儲捕獲跟蹤和定位解算程序,因此與基于X-86的軟件接收機(jī)不同,其需要對4個(gè)通道數(shù)據(jù)分階段進(jìn)行處理,如在捕獲階段結(jié)束時(shí)將跟蹤程序由片外存儲器加載到程序存儲空間中對信號進(jìn)行解調(diào)解擴(kuò)。由此可見,通用數(shù)字信號處理器資源有限,當(dāng)軟件接收機(jī)在該平臺上實(shí)現(xiàn)時(shí)需考慮內(nèi)存空間的合理分配;2006年美國Cornell大學(xué)HUMPHREYS等[30]設(shè)計(jì)了一款基于DSP平臺的軟件接收機(jī),相比于AKOS等設(shè)計(jì)的基于DSP的軟件接收機(jī),其跟蹤精度及通道數(shù)都有所提高,可同時(shí)跟蹤43通道數(shù)據(jù),定位誤差在5 m以內(nèi)。其選用的芯片為Texas Instruments公司的TMS320C6416 DSP芯片,軟件接收機(jī)整體示意圖如圖5所示。
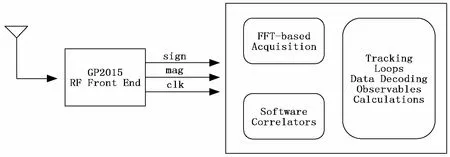
圖5 基于DSP的軟件接收機(jī)結(jié)構(gòu)示意圖Fig.5 Structure diagram of DSP-based software receiver
RF前端接收到衛(wèi)星信號后將其混頻到4.309 MHz,并以5.714 MHz對其進(jìn)行采樣,采樣得到的數(shù)據(jù)分為符號數(shù)據(jù)和數(shù)值數(shù)據(jù),分別送往DSP進(jìn)行處理,由軟件完成信號的捕獲、跟蹤和解算工作。實(shí)物原型如圖6所示,其中標(biāo)出了DSP芯片。實(shí)驗(yàn)結(jié)果表明,對于信噪比強(qiáng)度為42 dB-Hz的L1信號(L1信號由運(yùn)行在PC上的軟件模擬產(chǎn)生),該軟件接收機(jī)能在2.3 s內(nèi)完成32顆衛(wèi)星偽隨機(jī)碼碼相位捕獲的工作,可同時(shí)跟蹤43個(gè)通道的數(shù)據(jù)。在模擬的高動態(tài)情況下,當(dāng)徑向加速度達(dá)到12.3g時(shí),仍能穩(wěn)定跟蹤到衛(wèi)星信號。在靜態(tài)環(huán)境下,其定位誤差保持在5m以內(nèi),定位結(jié)果如圖7所示。其中圓環(huán)中心為測試點(diǎn)實(shí)際位置。
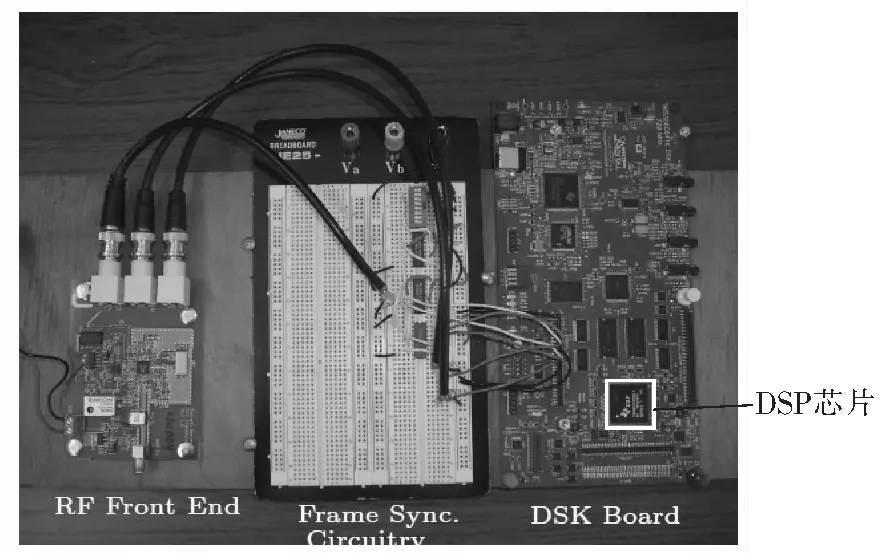
圖6 基于DSP的軟件接收機(jī)結(jié)構(gòu)圖Fig.6 Structure of DSP-based software receiver
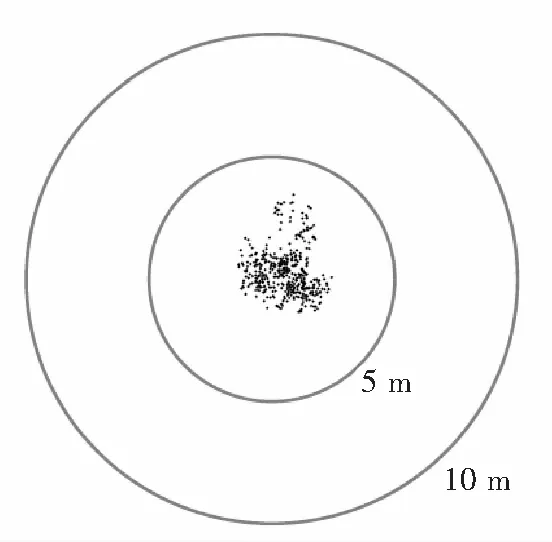
圖7 基于DSP的軟件接收機(jī)定位精度Fig.7 Positioning accuracy of DSP-based software receiver
隨著數(shù)字信號處理芯片的更新?lián)Q代以及軟件接收機(jī)基帶信號處理算法的不斷改進(jìn),基于DSP的軟件接收機(jī)的性能將會越來越好,可真正走向?qū)嵱没?004年澳大利亞新南威爾士大學(xué)的衛(wèi)星導(dǎo)航與定位研究小組研制了一款基于GP2015射頻前端和FPGA的信號處理平臺,并在該平臺上實(shí)現(xiàn)了GPS L1/L2雙頻軟件接收機(jī)[31];2005年德國的LUCK等[32]對比分析了基于PC和基于FPGA的接收機(jī)的定位性能。其采用Sprient 4760信號發(fā)生器模擬產(chǎn)生GPS L1信號,并分別使用基于FPGA的衛(wèi)星定位接收機(jī)和基于PC的純軟件接收機(jī)對該信號進(jìn)行捕獲、跟蹤及定位。兩軟件接收機(jī)衛(wèi)星搜索及定位成功率如圖8所示。純軟件接收機(jī)啟動8 s內(nèi)便可搜索到8顆可視衛(wèi)星,定位成功率超過門限值;基于FPGA的衛(wèi)星接收機(jī)啟動19 s后可搜索到8顆可視衛(wèi)星,定位成功率在最后3 s內(nèi)極劇上升。其定位結(jié)果精度對比如圖9所示。當(dāng)接收機(jī)進(jìn)入穩(wěn)定定位狀態(tài)時(shí),高度方向偏差保持在1 mm內(nèi),可穩(wěn)定定位。
經(jīng)過對比分析發(fā)現(xiàn),純軟件接收機(jī)在捕獲速度上略優(yōu)于基于FPGA的接收機(jī),基于FFT的快速捕獲算法比傳統(tǒng)捕獲算法性能更優(yōu),兩者的定位性能幾乎相同。同年意大利都靈理工大學(xué)DOVIS等[33]在DSP+FPGA平臺上實(shí)現(xiàn)了Galieo/GPS軟件接收機(jī),其軟件接收機(jī)平臺結(jié)構(gòu)示意圖如圖10所示。
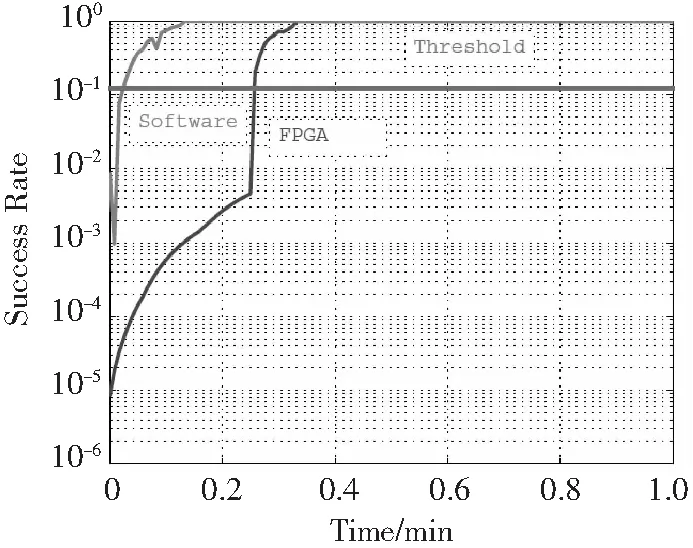
圖8 接收機(jī)衛(wèi)星搜索速度及無偏差定位成功率Fig.8 Receiver search satellites speed and no deviation location success rate
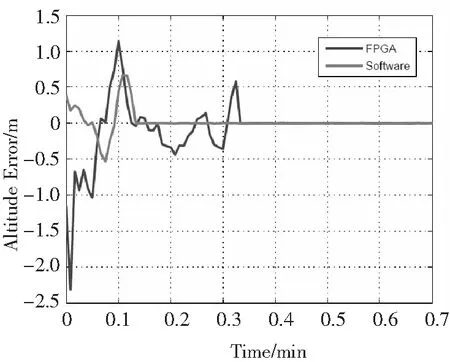
圖9 垂直高度定位誤差圖Fig.9 Vertical positioning error
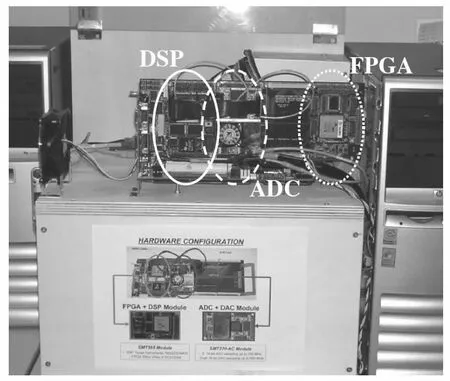
圖10 Galieo/GPS軟件接收機(jī)實(shí)現(xiàn)平臺示意圖Fig.10 Implementation platform of Galieo/GPS software receiver
通過對比實(shí)驗(yàn)表明,基于FPGA+DSP的軟件接收機(jī)的信號跟蹤情況與軟件模擬情況基本擬合,驗(yàn)證了該軟件接收機(jī)的可用性。2011年意大利博洛尼亞DIEM大學(xué)的AVANZI等[34]也設(shè)計(jì)了一種基于FPGA的多星座雙頻接收機(jī);同年阿根廷LaPlata國立大學(xué)的LOPEZ等[35]也成功研制出了一款基于FPGA的高精度GPS L1/L2民用信號軟件接收機(jī);Stanford大學(xué)RAMAKRISHNAN等[36]在通用的FPGA平臺上完成了特殊設(shè)計(jì)的快速捕獲模塊和弱信號捕獲模塊。通過使用的DSP片數(shù)和RAM區(qū)域來分析資源的使用率,分析了進(jìn)一步增強(qiáng)軟件接收機(jī)信號處理能力的可行性;2015年FORTIN等[37]提出了一種通用的基于2 048點(diǎn)FFT的捕獲結(jié)構(gòu),其可利用較少的FPGA資源在5 ms內(nèi)捕獲到L1信號。以上這些研究大多基于FPGA實(shí)現(xiàn)了衛(wèi)星定位軟件接收機(jī),由FPGA的硬件邏輯電路完成計(jì)算量較大的相關(guān)運(yùn)算,雖速度較快卻無法發(fā)揮軟件接收機(jī)的優(yōu)勢,不利于加入用于提高接收機(jī)性能的靈活的復(fù)雜算法。基于DSP的軟件接收機(jī)從信號捕獲到定位解算均由運(yùn)行在處理器上的軟件完成,通過修改程序即可實(shí)現(xiàn)性能升級,具有較高的靈活性。但類似于AKOS等基于DSP進(jìn)行的研究,其有限的資源需要進(jìn)行合理的分配并且可能會制約軟件接收機(jī)運(yùn)行的速度。因此,在不損失軟件接收機(jī)性能的前提下,如何有效地減少算法的執(zhí)行時(shí)間和降低算法的空間復(fù)雜度成為關(guān)鍵問題。
2005年中國科學(xué)院在FPGA和DSP平臺上實(shí)現(xiàn)了基于硬件數(shù)字相關(guān)器的GPS信號多通道實(shí)時(shí)處理接收機(jī)[38];2010年上海宇志通信公司開發(fā)了基于DSP/FPGA 平臺的GNSS 衛(wèi)星導(dǎo)航接收機(jī),集擴(kuò)頻通信與解擴(kuò)、導(dǎo)航、信號處理及相關(guān)軟件算法為一體,且所有代碼全面開源,可以同時(shí)接收GPS和Glonass信號,定位精度在10 m以內(nèi)[39];中國上海交通大學(xué)的TAO等[40]改進(jìn)了LEDVINA等提出的相關(guān)器算法,并在奔騰-M 1.1G嵌入式測試平臺上實(shí)現(xiàn)了該相關(guān)器算法,能夠在0.358 ms內(nèi)跟蹤到12個(gè)通道的數(shù)據(jù),比LEDVINA等提出的軟件相關(guān)器算法快了近1.5倍;2014年上海宇志通信公司在原GNSS軟件接收機(jī)基礎(chǔ)上開發(fā)了GPS L1+BD2B1 雙頻衛(wèi)星定位接收機(jī),其能夠跟蹤12通道衛(wèi)星數(shù)據(jù),GPS定位誤差在10 m以內(nèi),BD定位誤差在15 m內(nèi)[41];2015年南京航空航天大學(xué)薛濤等[42]基于DSP+FPGA設(shè)計(jì)實(shí)現(xiàn)了北斗軟件接收機(jī),并分別在靜態(tài)、低動態(tài)和高動態(tài)環(huán)境下對接收機(jī)性能進(jìn)行了驗(yàn)證,實(shí)驗(yàn)結(jié)果表明該軟件接收機(jī)能滿足實(shí)時(shí)性、高精度等性能指標(biāo)。
根據(jù)近年來衛(wèi)星定位軟件接收機(jī)的發(fā)展現(xiàn)狀可知,國外對于軟件接收機(jī)的研究工作已基本成熟,正朝著研制和開發(fā)應(yīng)用于不同領(lǐng)域的多類型多星座多頻率的衛(wèi)星定位軟件接收機(jī)方向邁進(jìn)。中國對軟件接收機(jī)的研制和開發(fā)仍然主要集中在GPS L1單頻軟件接收機(jī)上,關(guān)于北斗軟件接收機(jī)的研究也多側(cè)重于算法模擬仿真和硬件芯片設(shè)計(jì),嵌入式實(shí)現(xiàn)方面的研究較少,因此和國外還存在一定的差距。在軟件接收機(jī)實(shí)現(xiàn)方式方面,基于PC通用CPU,F(xiàn)PGA+DSP,F(xiàn)PGA,DSP的軟件接收機(jī)均能很好地完成接收機(jī)定位導(dǎo)航工作。基于通用CPU的軟件接收機(jī)雖可利用其高速數(shù)據(jù)處理能力和巨大的數(shù)據(jù)存儲空間實(shí)現(xiàn)復(fù)雜優(yōu)化算法,提高接收機(jī)性能,但多處于實(shí)驗(yàn)室研究階段,還不能使軟件接收機(jī)真正走向?qū)嵱没换贔PGA的軟件接收機(jī)主要依賴于FPGA內(nèi)部的硬件邏輯來實(shí)現(xiàn)相關(guān)功能模塊,雖處理速度較快但不利于加入用于提高接收機(jī)性能的復(fù)雜算法;而基于FPGA+DSP,DSP的軟件接收機(jī),既能發(fā)揮軟件接收機(jī)的靈活性,又能實(shí)現(xiàn)較復(fù)雜的算法,有利于接收機(jī)性能的提高,是軟件接收機(jī)較理想的實(shí)現(xiàn)方式。
3 研究展望及應(yīng)用前景
3.1 研究展望
目前國內(nèi)外很多研究團(tuán)隊(duì)基于PC平臺研究GPS軟件接收機(jī),很多算法研究也多基于PC上Matlab仿真軟件實(shí)現(xiàn),由于Matlab良好的開發(fā)環(huán)境和PC強(qiáng)大的數(shù)據(jù)處理能力,軟件接收機(jī)高性能算法的研究有了很大的發(fā)展。但基于Matlab 軟件仿真實(shí)現(xiàn)的算法執(zhí)行效率較低,可移植性較差,不利于軟件接收機(jī)的實(shí)用化。因此,未來要研究適合在資源有限的嵌入式平臺上實(shí)現(xiàn)的高性能接收機(jī)算法,將提出的高性算法用較為通用的C/C++語言在通用軟件接收機(jī)硬件平臺DSP,DSP+FPGA上實(shí)現(xiàn),真正實(shí)現(xiàn)高性能實(shí)時(shí)軟件接收機(jī)。
隨著GNSS系統(tǒng)的不斷發(fā)展和完善,新的衛(wèi)星導(dǎo)航信號陸續(xù)出現(xiàn),因此研究開發(fā)能夠處理這些新型信號并可應(yīng)對未來信號格式變化的接收機(jī)尤其重要。例如在GNSS 的L1 頻帶,未來的導(dǎo)航信號包括GPS 的L1,Galileo 的E1,Glonass的L1OF 和L1OC以及北斗的B1信號[43]。這些信號的組合能大大提高導(dǎo)航系統(tǒng)的可靠性、連續(xù)性和精度。GNSS系統(tǒng)在可用性、完好性、定位精度方面也要優(yōu)于單一系統(tǒng)。因此,兼容多星座、多頻率的軟件接收機(jī)將會是未來接收機(jī)的一個(gè)發(fā)展方向。
3.2 應(yīng)用前景
2015年,在GPS國際協(xié)會已統(tǒng)計(jì)出GPS的117種不同類型的應(yīng)用中,汽車應(yīng)用和蜂窩通信的集成仍是當(dāng)前最大的兩個(gè)市場,而在無人駕駛技術(shù)方面的應(yīng)用也已得到了廣泛的關(guān)注。衛(wèi)星導(dǎo)航定位技術(shù)作為無人駕駛汽車技術(shù)的關(guān)鍵技術(shù)之一,對汽車的路徑規(guī)劃和安全行駛起著重要作用。現(xiàn)有的衛(wèi)星接收機(jī)多為硬件接收機(jī),雖定位性能良好,但數(shù)據(jù)更新率較低,結(jié)構(gòu)固定,不利于無人駕駛汽車傳感器的集成。當(dāng)前的無人駕駛定位技術(shù)一般采用多種定位方式融合的方法,以衛(wèi)星定位作為主要定位來源,輔以自主定位方式如慣性導(dǎo)航系統(tǒng)(inertial navigation system, INS)與航位推算定位技術(shù)(dead reckoning, DR)實(shí)現(xiàn)組合定位[44]。硬件接收機(jī)可拓展性較差,不利于各導(dǎo)航信息的深度耦合。軟件接收機(jī)作為各大研究機(jī)構(gòu)及高校研究新型衛(wèi)星接收機(jī)技術(shù)的實(shí)用平臺,可深入到接收機(jī)(特別是信號通道)內(nèi)部觸及其底層核心技術(shù)[45],有利于衛(wèi)星導(dǎo)航信號與各傳感器信號進(jìn)行深度融合來提高接收機(jī)各過程的性能和速度。因此,可拓展性好、定位精度高的軟件接收機(jī)技術(shù)在無人駕駛車輛中將有廣泛的應(yīng)用。
[1] 董緒榮,唐斌,蔣德. 衛(wèi)星導(dǎo)航軟件接收機(jī)原理與設(shè)計(jì)[M]. 北京:國防出版社,2008.
[2] TSUIJ B Y. Fundamentals of Global Positioning System Receivers: A Software Approach[M]. [S.l.]: John Wiley & Sons, 2000.
[3] KRUMVIEDA K, MADHANI P, CLOMAN C. A complete IF software GPS receiver: A tutorial about the details[C]// Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Salt Lake City: [s.n.],2011:809-811.
[4] MA C, LACHAPELLE G, CANNON M E. Implementation of a software GPS receiver[C]// ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach:[s.n.], 2004: 956-970.
[5] NordNav. NordNav-R30 Package: The Complete GNSS Software Receiver Package[EB /OL]. http://www.navtechgps.com, 2009.
[6] PANY T, FRSTER F, EISSFELLER B. Real-time processing and multipath mitigation of high bandwidth L1/L2 GPS signals with a PC-based software receiver[C]//ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach: [s.n.], 2004: 971-985.
[7] LEDVINA B M, PSIAKI M L, SHEINFELD D J A. Real time GPS civilian L1/L2 software receiver[C]// ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach:[s.n.], 2004: 986-1005.
[8] CHARKHANDEH S, PETOVELLO M G, LACHAPELLE G. Performance testing of a real-time software-based GPS receiver for x86 processors[C]//ION 19th ITM of the satellite Division. Fort Worth:[s.n.], 2006: 2313-2320.
[9] AKOS D M, NORMARK P L, ENGE P, et al. Real-time GPS software radio receiver[C]//The Institute of Navigation National Technical Meeting. Long Beach:[s.n.], 2001: 809-816.
[10]AKOS D M,NORMARK P L,HANSSON A, et al. Global positioning system software receiver (gpSrx) implementation in low cost power programmable processor[C]// ION GPS 2001.Salt Lake City:[s.n.], 2001: 2851-2858.
[11]LEDVINA B M, CERRUTI A P, PSIAKI M L, et al. Performance tests of a 12-channel real-time GPS L1 software receiver[C]// ION NTM 2003. Anaheim:[s.n.], 2003: 679-688.
[12]趙麗. 基于FPGA平臺的GPS信號捕獲算法研究與實(shí)現(xiàn)[D]. 南京:南京郵電大學(xué),2012.
ZHAO Li. Research and Implementation of Acquisition Algorithm for GPS Signal based on FPGA Platform[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2012.
[13]JAVIER A, CARLES F P. Fastening GPS and Galileo tight with a software receiver[C]//26th International Meeting of the Satellite Division of ION. Nashville:[s.n.], 2013: 1383-1385.
[14]JUANG J C, TSAI C T, CHEN Y H. Development of a PC-based software receiver for the reception of Beidou navigation satellite signals[J]. The Journal of Navigation, 2013,66:701-718.
[15]BHUIYAN M Z H,S?DERHOLM S,THOMBRE S, et al. Implementation of a software-defined Beidou receiver[J]. Lecture Notes in Electrical Engineering, 2013,303:751-762.
[16]MATHEWS M B, MACDORAN P F. A software defined radio solution for hybrid GPS/signals of opportunity navigation[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Nashville:[s.n.], 2013:1527-1538.
[17]GUNAWARDENA S. A universal GNSS software receiver MATLAB toolbox for education and research[C]//26th International Meeting of the Satellite Division of ION. Nashville:[s.n.], 2013: 1560-1576.
[18]BROWN A, REDD J, DIX M. Open source software defined radio platform for GNSS recording and simulation[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Nashville:[s.n.], 2013: 1508-1516.
[19]SUZUKI T, KUBO N. GNSS-SDRLIB: An open-source and real-time GNSS software defined radio library[C]//Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation. Tampa:[s.n.], 2014: 1364-1375.
[20]PARK K P, YANG J S, PARK C, et al. Multi-GPGPU based GNSS real-time software receiver for anti-jamming application[C]//Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation. Florida:[s.n.], 2015: 3165-3170.
[21]ARRIBAS J, PRADES C F, CLOSAS P. Gestalt: A testbed for experimentation and validation of GNSS software receivers[C]//Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation. Florida:[s.n.], 2015: 3222-3234.
[22]孫禮. GPS接收機(jī)系統(tǒng)的研究[D]. 北京:北京航空航天大學(xué),1998.
SUN Li. Research of GPS Receiver System[D].Beijing: Beihang University, 1998.
[23]魯郁.GPS全球定位接收機(jī)——原理與軟件實(shí)現(xiàn)[M].北京:電子工業(yè)出版社,2009.
[24]JIN Tian, LIU Yang. A novel GNSS weak signal acquisition using wavelet denoising method[C]// ION NIM 2008. San Diego:[s.n.], 2008: 303-309.
[25]WU Cailun, QIAN Yi, CUI Xiaowei, et al. The optimized method and algorithms in the CPU&GPU-based GNSS software receiver[C]// 22nd International Meeting of the Satellite Division of ION. Savannah:[s.n], 2009: 339-343.
[26]趙晉. 北斗二代衛(wèi)星導(dǎo)航接收機(jī)關(guān)鍵共性技術(shù)研究[D]. 上海:復(fù)旦大學(xué),2010.ZHAO Jin. The Key Technology Research of Beidou Second Generation Satellite Navigation Receiver[D]. Shanghai: Fudan University, 2010.
[27]羅正平. 北斗二號民用軟件接收機(jī)的算法研究與仿真[D]. 成都:電子科技大學(xué),2012.
LUO Zhengping. Research and Simulation of Beidou2 Civil Software Receiver Algorithms[D]. Chengdu: University of Electronic Science and Technology of China, 2012.
[28]ZHANG Xin, ZHAN Xingqun, FENG Shaojun, et al. An open-source real-time L1/L2 dual frequency software receiver with a open source GPS-disciplined clocl-design, implementation and test[C]// Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation. Tampa:[s.n.], 2014: 1376-1382.
[29]XU Liangchun, ZIEDAN N I, GUO Wenfei, et al. NAVSDR: A GPU-based modular GPS software receiver[C]//Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation. Florida:[s.n.], 2015: 3198-3205.
[30]HUMPHREYS T E, PSIAKI M L, KINTNER P M. GNSS receiver implementation on a DSP: Status, challenges, and prospects[C]//ION GNSS 19th International Technical Meeting of the Satellite Division. Fort Worth:[s.n.], 2006: 2370-2382.
[31]ENGEL F, HEISER G, MUMFORD P, et al. An open GNSS receiver platform architecture[J]. Journal of Global Positioning System, 2004, 3(2): 63-69.
[32]LUCK T, BODENBACH M, WINKEL J, et al. Trade-off between pure software based and FPGA based base band processing for a real time kinematics GNSS receiver[C]// ION GNSS 18th International Technical Meeting of the Satellite Division. [S.l.]:[s.n.], 2005: 1589-1597.
[33]DOVIS F, SPELAT M, MULASSANO P, et al. On the tracking performance of a Galileo/GPS receiver based on hybrid FPGA/DSP board[C]// ION GNSS 18th International Technical Meeting of the Satellite Division.[S.l.]:[s.n.], 2005: 1611-1620.
[34]AVANZI A, TORTORA P, GARCIA-RODRIGUEZ A. Design and implementation of a novel multi-constellation FPGA-based dual frequency GNSS receiver for space applications[C]// 24th International Technical Meeting of the Satellite Division of the Institute of Navigation. Portland:[s.n.], 2011: 746-752.
[35]LOPEZ L V R, GARCIA J G, RONCAGLIOLO P A, et al. An experimental L1/L2 GNSS receiver for high precision applications[J]. IEEE Latin America Transactons, 2013,11(1):48-53.
[36]RAMAKRISHNAN S, ENGE P. Feasibility study on the use of Xilinx COTS Rad-Hardened FPGAs for GNSS signal acquisition in space applications[C]// Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Nashville:[s.n.], 2013: 1527-1538.
[37]FORTIN M A, BOURDEAU F, LANDRY R J. Implementation strategies for a software-compensated FFT-based generic acquisition architecture with minimal FPGA resources[J]. Journal of the Institute of Navigation, 2015,63(3): 171-188.
[38]武建鋒. 基于DSP技術(shù)的GPS接收機(jī)設(shè)計(jì)[D]. 北京:中國科學(xué)院, 2006.
WU Jianfeng. Design of DSP-based GPS Receiver[D]. Beijing: Chinese Academy of Sciences, 2006.
[39]上海宇志通信技術(shù)有限公司. GNSS衛(wèi)星導(dǎo)航開發(fā)驗(yàn)證平臺[Z].[S.l.]:[s.n.], 2010: 1-16.
[40]TAO Jianwei, YU Wenxian. A real-time GPS software receiver correlator design for embedded platform[C]//24th International Technical Meeting of the Satellite Division of the Institute of Navigation. Portland:[s.n.], 2011: 808-812.
[41]上海宇志通信技術(shù)有限公司. GPS L1+BD2B1 雙模衛(wèi)星導(dǎo)航接收機(jī)——系統(tǒng)方案設(shè)計(jì)說明[Z]. [S.l.]:[s.n.], 2014: 1-36.
[42]薛濤,趙偉,李榮冰,等. 北斗導(dǎo)航接收機(jī)的硬件設(shè)計(jì)與實(shí)現(xiàn)[J]. 航天控制,2015,33(1): 94-98.
XUE Tao, ZHAO Wei, LI Rongbing, et al. The hardware design and implementation of BD navigation receiver[J]. Aerospace Control, 2015, 33(1): 94-98.
[43]楊藍(lán),朱越華. 多星座GNSS接收機(jī)設(shè)計(jì)與實(shí)現(xiàn)[J]. 火控雷達(dá)技術(shù),2014,43(3): 75-78.
YANG Lan, ZHU Yuehua. Design and implementation of a multi-constellation GNSS receiver[J]. Fire Control Radar Technology,2014, 43(3): 75-78.
[44]李陸浩. 面向無人駕駛汽車的車道級導(dǎo)航研究[D]. 長春:吉林大學(xué),2014.
LI Luhao. Research on Lane Level Navigation for Autonomous Vehicle[D]. Changchun: Jilin University, 2014.
[45]唐斌,劉富,張益清. GNSS接收機(jī)發(fā)展趨勢與研究思路分析[J]. 導(dǎo)航天地,2011(4): 82-84.
TANG Bin, LIU Fu, ZHANG Yiqing. The development tendency and research analysis of GNSS receiver[J]. GNSS World,2011(4):82-84.
Research progress of satellite positioning software receiver
ZHANG Pengna1, ZENG Qingxi1, ZHU Xuefen2, PEI Ling3
(1.Research Center of Vehicle Electronic, Nanjing University of Aeronautics and Astronautics, Nanjing, Jiangsu 210016, China; 2. School of Instrument Science and Engineering, Southeast University, Nanjing, Jiangsu 210096, China;3.Shanghai Key Laboratory of Navigation and Location Based Service, Shanghai Jiaotong University, Shanghai 200240, China)
Software receiver has become a research hotspot in the satellite positioning receiver field because of its good universality, flexibility, and positioning performance. The structural features of software receiver and the current research status at home and abroad are formulated, and the structures and performance of PC-based, DSP(digital signal processor)-based, FPGA(field programmable gate array)-based and FPGA+DSP-based software receivers are compared and analyzed. It is pointed out that the FPGA+DSP- and DSP-based implementation can better demonstrate the advantages of software receiver, and realize its real application. Finally, the development directions of software receiver in the future and its application prospect in unmanned driving technology are put forward. The paper can provide theoretical references for software receiver's research and application.
wireless communication technology; satellite positioning; software receiver; DSP/FPGA; research progress
1008-1542(2016)03-0220-10
10.7535/hbkd.2016yx03002
2015-12-25;
2016-03-02;責(zé)任編輯:馮 民
國家自然科學(xué)基金(51505221)
張鵬娜(1992—),女,河南安陽人,碩士研究生,主要從事智能車輛導(dǎo)航方法方面的研究。
曾慶喜博士。E-mail:jslyzqx@163.com
TH161
A
張鵬娜,曾慶喜,祝雪芬,等.衛(wèi)星定位軟件接收機(jī)研究綜述[J].河北科技大學(xué)學(xué)報(bào),2016,37(3):220-229.
ZHANG Pengna, ZENG Qingxi, ZHU Xuefen,et al.Research progress of satellite positioning software receiver[J].Journal of Hebei University of Science and Technology,2016,37(3):220-229.
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25