PMSM伺服系統速度環高階模型實驗建模及分析
2016-11-28 03:16:56潘海鴻林曉詞何蘊達
微特電機 2016年4期
潘海鴻,王 玲,陳 琳,林曉詞,何蘊達
(1.廣西大學,南寧 530004;2.廣西制造系統與先進制造技術重點實驗室,南寧 530004)
?
PMSM伺服系統速度環高階模型實驗建模及分析
潘海鴻1,2,王 玲1,陳 琳1,2,林曉詞1,何蘊達1
(1.廣西大學,南寧 530004;2.廣西制造系統與先進制造技術重點實驗室,南寧 530004)
針對PMSM伺服系統速度環理論建模過程中忽略系統參數時變、負載擾動、電機非線性和死區等因素導致建模不精確的問題,提出使用動態信號分析儀(DSA)獲取PMSM伺服系統的高階實驗模型。通過搭建基于DSA的PMSM伺服系統速度環建模實驗平臺,獲取PMSM伺服系統速度環的三階、四階和六階數學模型;基于獲取的不同階次的模型進行PI參數整定,將整定結果輸入到伺服驅動器中,并通過DSA測試伺服系統速度階躍響應情況。實驗結果表明:該實驗建模方法可行、有效,可獲得符合實際PMSM伺服系統速度環頻率特性的數學模型,并可以應用于伺服系統設計、性能分析與參數整定。
PMSM伺服系統;速度環;建模;動態信號分析儀
0 引 言
PMSM伺服系統性能優良廣泛應用于數控機床、工業機器人和航空航天等領域[1-2]。PMSM伺服系統速度環的主要作用是抑制負載擾動對系統的影響,從而減小速度波動[3-4]。而系統模型又是進行系統設計、性能分析與參數整定的基礎,因此建立PMSM伺服系統速度環模型并基于模型整定其控制器參數,對提高整個系統的抗干擾能力有重要意義。
對PMSM伺服系統速度環建模的方法主要有理論建模和實驗建模[5]兩種,其中理論建模是指在被測對象運動規律的基礎上,利用物理和化學定律以及數學原理,建立和描述系統輸入、輸出以及系統狀態之間的關系。在理論建模時一般會忽略伺服系統中存在的非線性、死區、參數時變和負載擾動等因素,使得建立的模型與實際系統的動態響應有較大的差異[6-9];實驗建模是指對被測對象施加已知的輸入信號激勵被測對象,采集并處理輸出信號,應用數學手段分析、確定系統輸入與輸出之間的關系。在實驗建模時需要解決三個問題:辨識實驗設計、數據預處理和辨識方法[10]。其中辨識方法是關鍵,傳統的辨識方法主要有最小二乘法、輔助模型辨識法、梯度辨識法、多新息辨識法、極大似然辨識法、遞階辨識法和貝葉斯辨識法等[10-11]。針對不同用途對辨識方法進行修正和結合,又有遞階最小二乘法、多新息最小二乘法、遞階梯度迭代法等[10]。近年來,神經網絡、遺傳算法等智能算法與上述辨識方法相結合應用于系統辨識出現了許多新算法。這些算法普遍存在收斂性、收斂速度和辨識精度的問題,為提高辨識精度和收斂速度需要完善辨識算法,這樣會使算法變得復雜[11-13]。
通過上述對比,本文采用實驗建模的方式,提出通過DSA對PMSM伺服系統速度環的模型進行辨識。DSA設備能夠用最小二乘法對系統頻率特性曲線進行擬合來進行系統辨識,由于輸入、輸出信號可以準確獲取,因此使用最小二乘法可以簡便、準確地辨識未知參數,最后建立所需要的實驗模型。基于獲取的實驗辨識模型,再對控制器PI參數進行整定,最后通過實驗驗證獲取的實驗建模可行、有效。
1 伺服系統速度環理論建模
建立PMSM伺服系統速度環數學模型是PMSM伺服系統速度環性能分析與參數整定的基礎。PMSM伺服系統速度環主要包括電流閉環、伺服電機、以及反饋濾波等環節,將電流環等效為一階慣性環節,分別對各個環節建模,可以建立如圖1所示的模型[14]。其中Tv為前向濾波時間常數,Kvf為檢測環節反饋系數,1/K是電流環等價的一階慣性環節時間常數,Kt為轉矩系數,Jm為電機軸轉動慣量,B為電機阻尼系數。將圖1模型轉換為單位負反饋的形式,如圖2所示。
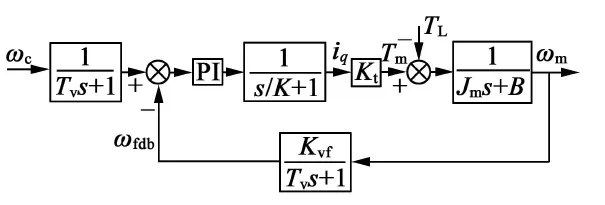
圖1 速度環簡化控制框圖
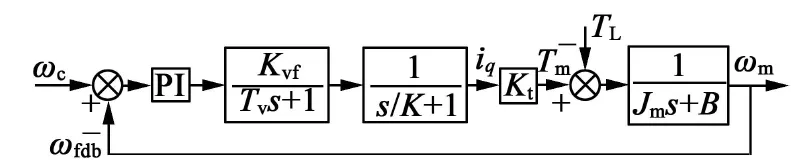
圖2 速度環簡化單位負反饋控制框圖
2 伺服系統速度環實驗建模
DSA可以用于轉動機械測量、結構測量、聲學測量、頻譜和網絡測量和控制系統測量[15]。本文使用DSA的控制系統測量功能。DSA內置波形信號源可以產生正弦掃頻信號,用于測量被測環節Bode圖;其具有的平均功能可以濾除測量過程中的測量噪聲,使得測量結果真實、準確;其具有的曲線擬合和數學運算功能,可以由Bode圖擬合獲取被測環節的傳遞函數[15]。系統建模是分析系統性能和參數整定的基礎,使用DSA建模首先需要測量獲取伺服系統速度環的頻率特性曲線;然后通過曲線擬合獲取其數學模型。其中獲取頻率特性曲線主要有開環測量和閉環測量兩種方式,其測量框圖如圖3所示。
兩種測量方式都可獲取被測系統以及被測系統被控對象傳遞函數[15]。設DSA測量結果為G,則系

(a)開環測量(b)閉環測量
圖3 DSA測量頻率特性曲線框圖
統數學模型Gs和被控對象Gp在開環測量和閉環測量時可以由式(1)和式(2)分別計算獲得。
(1)
(2)
3 實驗與結果分析
3.1 實驗平臺
為了對PMSM伺服系統速度環實驗建模,依據圖3(b)設計圖4的實驗平臺,該平臺主要由伺服驅動部分、D/A轉換電路和DSA三部分組成。伺服驅動部分為東元TSB08751C伺服電機(750 W)及驅動器,參數如表1所示;DSA為Agilent35670A,參數如表2所示;D/A轉換電路采用16位串行數模轉換芯片DAC714,時鐘頻率10 MHz。其中DSA輸入通道CH1和CH2要求輸入信號為模擬量,D/A轉換電路用于將編碼器速度信號轉換為模擬電壓。
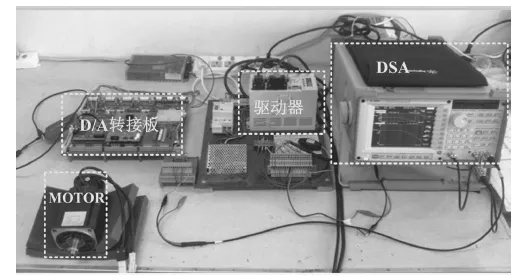
圖4 實驗平臺
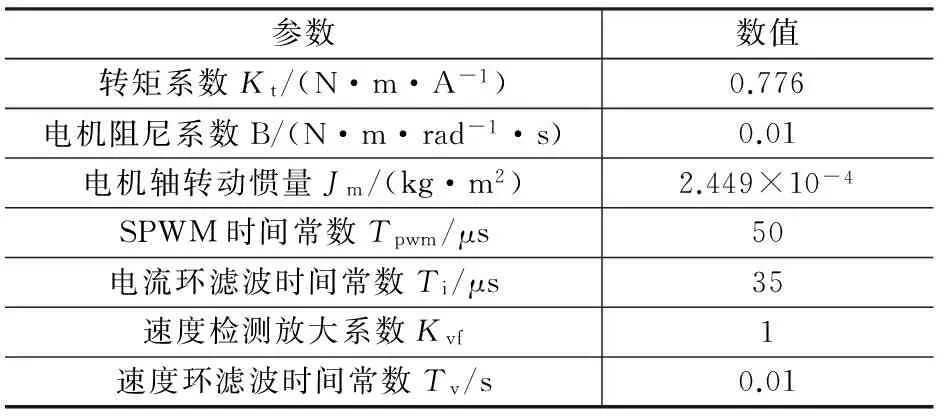
表1 TSB08751C伺服電機參數
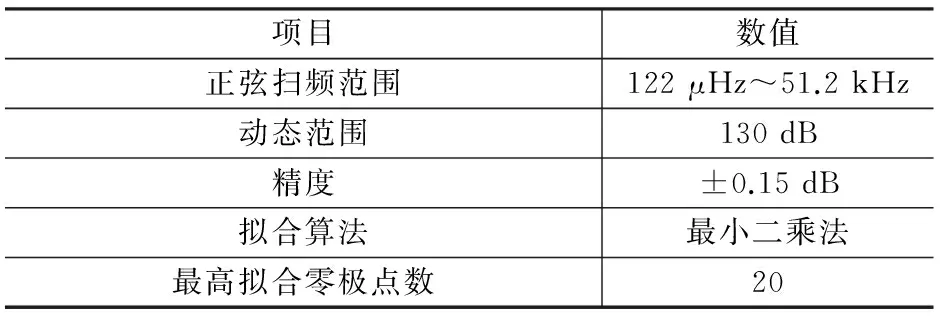
表2 Agilent35670A主要參數
3.2 速度環理論建模與控制器PI參數整定
東元伺服系統速度環PI控制器的傳遞函數:
(3)
由圖2可知,速度環被控對象的傳遞函數表達式:
(4)
將表1參數代入式(4)則速度環被控對象傳遞函數:
(5)
其中電流環簡化一階慣性環節時間常數1/K=2(Ti+Tpwm)[16]。基于理論建模使用MATLAB中的sisotool對速度環PI控制器參數進行整定[17],以階躍響應無超調、調節時間盡可能短為性能指標獲取的整定結果如下:
(6)
由整定結果可知,PI控制器比例系數為0.017 Hz、積分時間常數為30.86 ms。東元TSB08751C伺服系統速度控制器比例參數調節范圍為10~450 Hz,積分時間常數調節范圍為0.2~100 ms。由此對比可知通過理論建模并進行PI參數整定,整定結果與實際驅動器參數不匹配,無法應用。
3.3 速度環實驗建模與控制器PI參數整定

(7)
(8)
(9)
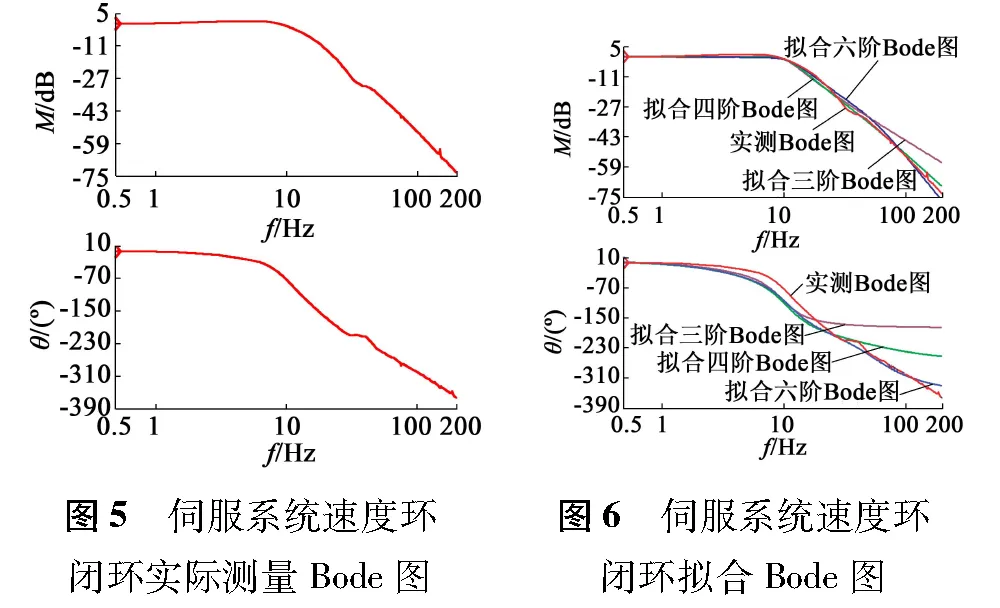
圖5 伺服系統速度環閉環實際測量Bode圖圖6 伺服系統速度環閉環擬合Bode圖
由圖6對速度環閉環不同階次Bode圖擬合情況可知,擬合獲取的三階模型其幅頻曲線在0.5~60 Hz范圍內與系統實測的幅頻曲線幾乎重合,相頻曲線在0.5~20 Hz范圍內與實測相頻曲線幾乎重合。擬合獲取的四階模型其幅頻曲線在0.5~100 Hz范圍內與系統實測的幅頻曲線幾乎重合,相
頻曲線在0.5~40 Hz范圍內與實測相頻曲線幾乎重合。擬合獲取的六階模型其幅頻曲線在0.5~150 Hz范圍內與系統實測的幅頻曲線幾乎重合,相頻曲線在0.5~150 Hz范圍內與實測相頻曲線幾乎重合。可知三個不同階次模型中六階模型與PMSM伺服系統速度環實際頻率特性最符合。
按照如圖7所示的參數整定流程,依據階躍響應無超調,調節時間盡可能短對速度環PI控制器參數進行整定,分別基于實驗辨識的三階、四階和六階模型,獲得整定結果如表3所示。
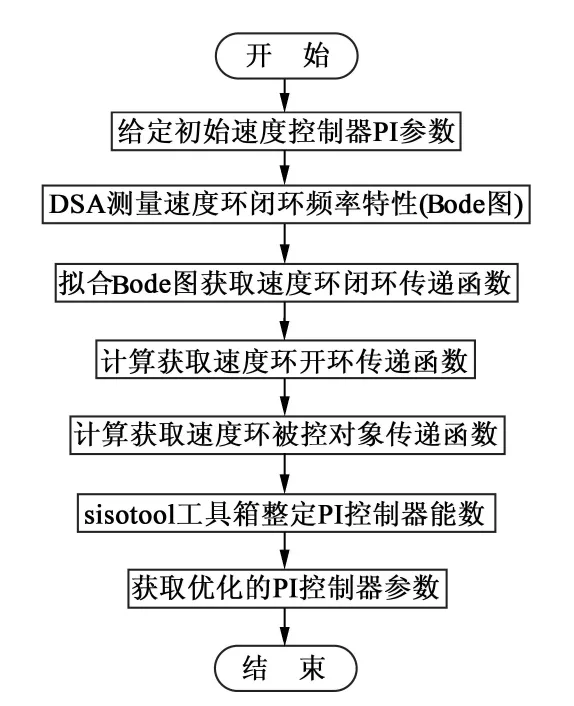
圖7 基于實驗建模整定速度控制器PI參數流程圖
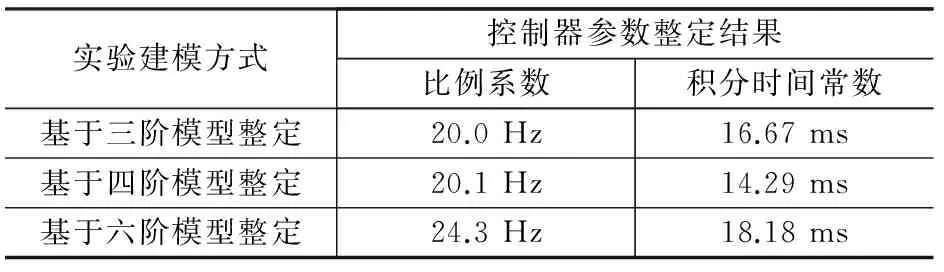
表3 伺服系統速度控制器PI參數整定結果
將整定結果輸入至伺服驅動器中,伺服驅動器外部速度信號輸入4 V(800 r/min)的階躍信號,由DSA測量獲取電機階躍響應如圖8所示。實驗結果如下:(1)經過上述方法對速度控制器PI參數進行整定,整定結果可用于驅動器參數調節;(2)整定后系統的超調量減小,調整時間減少,系統性能提高;(3)基于六階模型整定結果對應的階躍響應超調量最小。
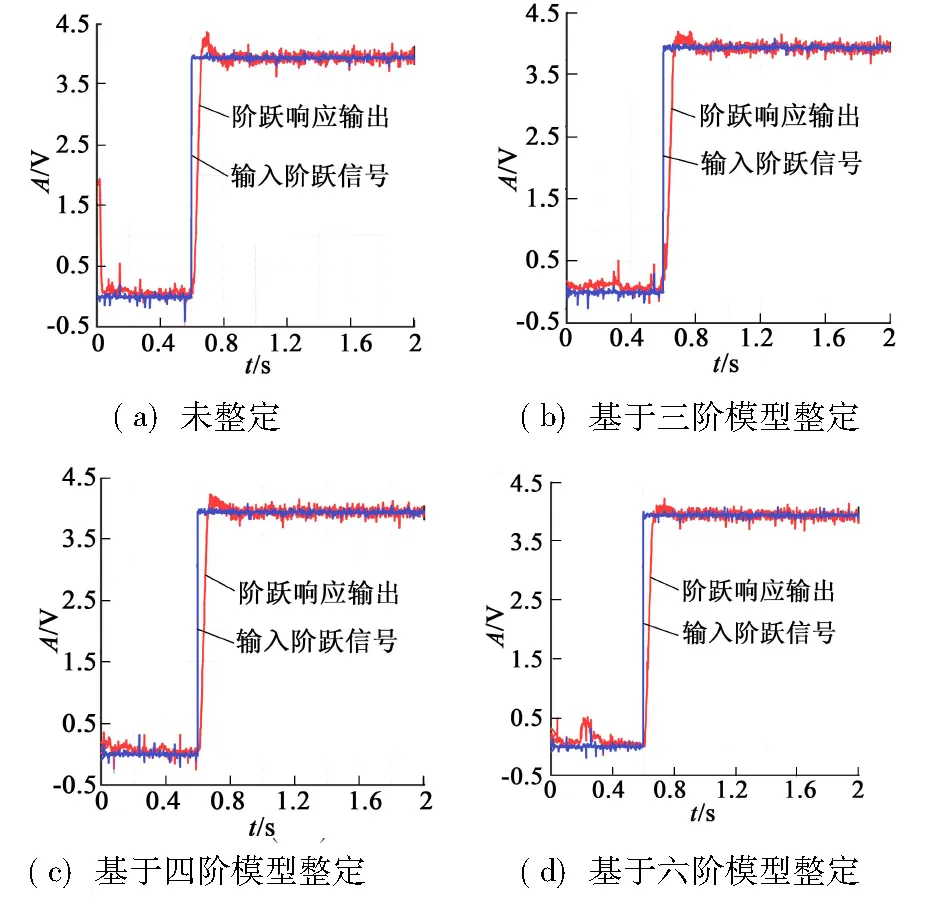
(a)未整定(b)基于三階模型整定(c)基于四階模型整定(d)基于六階模型整定
圖8 基于不同階次模型PI參數整定后系統速度階躍響應
由實驗結果可知:(1)采用DSA實驗建立伺服系統速度環模型是有效的;(2)基于實驗建立模型整定速度控制器PI參數的方法是可行和有效的。但是由于測量過程中難免會存在誤差,伺服系統速度環低階模型存在一定的簡化,且電機空載時易受外界干擾,因此按照性能指標要求整定的控制器PI參數并未使電機在實際運行中超調量減小到0,但性能有明顯改善,說明該方法的有效性。
4 結 語
本文針對PMSM伺服系統速度環理論建模與實際系統動態響應有較大差異的問題,采用DSA實現對PMSM伺服系統速度環高階模型的實驗建模,通過擬合實際測量的速度環頻率特性曲線來獲得速度環更為精確的數學模型;并基于該實驗模型整定速度控制器PI參數,最終獲得了伺服驅動系統較高的速度響應性能。
[1] 朱中衛. 基于DSA的伺服系統速度環建模與PI參數整定[D].南寧:廣西大學,2014.
[2] 吳春,齊蓉,李兵強,等.永磁同步電動機在電動舵機伺服系統中的應用[J]. 微特電機,2012,40(5):10-12.
[3] 李建軍,桂衛華. PMSM交流伺服系統負載轉矩動態補償方法[J]. 微特電機,2007,35(5):16-19.
[4] 陳鵬展. 交流伺服系統控制參數自整定策略研究[D].武漢:華中科技大學,2010.
[5] 楊承志,孫棣華,張長勝. 系統辨識與自適應控制[M]. 重慶:重慶大學出版社,2003.
[6] 朱敏,于海生. 永磁同步電動機伺服控制系統哈密頓建模與仿真[J]. 微特電機,2007,35(2):4-7,17.
[7] 劉棟良,賀益康. 交流伺服系統逆變器死區效應分析與補償新方法[J]. 中國電機工程學報,2008,28(21):46-50.
[8] Du H, Nair S S. Modeling and compensation of low-velocity friction with bounds[J].IEEE Transactions on Control Systems Technology,1999,7(1):110-121.
[9] 盧澤生,張強. 高精度交流伺服系統的模糊PID雙模控制[J].北京航空航天大學學報,2007,33(3):315-318.
[10] 丁鋒.系統辨識(1):辨識導引[J].南京信息工程大學學報:自然科學版,2011,3(1):1-22.
[11] 王琳,馬平.系統辨識方法綜述[J].電力情報,2001,(4):63-66.
[12] 王清太,段毅. 神經網絡在某交流伺服系統建模中的應用[J].火力與指揮控制,2008,33(11):152-154.
[13] 劉通,童仲志. 基于RBF神經網絡的某交流伺服系統辨識研究[J].機械制造與自動化,2013,42(2):113-115.
[14] 肖啟明,楊明,劉可述,等.PMSM伺服系統速度環PI控制器參數自整定及優化[J]. 電機與控制學報,2014,18(2):102-107.
[15] Agilent company.Agilent 35670A Operator's Guide[M].Agilent Technologies,2010.
[16] 阮毅,陳伯時. 電力拖動與自動控制系統——運動控制系統[M]. 4版. 北京:機械工業出版社, 2013.
[17] 李鐘慎. 用sisotool實現經典控制系統的設計與仿真[J]. 計算機仿真,2007,24(5):173-175.
Experimental Modeling and Analysis of High Order Model for Speed Loop in PMSM Servo System
PANHai-hong1,2,WANGLing1,CHENLin1,2,LINXiao-ci1,HEYun-da1
(1.Guangxi University,Nanning 530004,China;2.Guangxi Key Laboratory of Manufacturing System & Advanced Manufacturing Technology,Nanning 530004,China)
Mechanism modeling is used to model the speed loop of PMSM servo system in general. However, the system model is inaccurate in this method, because of some factors neglected. These factors mainly include time-varying characteristic of system parameters, load disturbance, nonlinearities and dead time of motor, etc. In this paper, a experimental method, modeling based on dynamic signal analyzer (DSA), was proposed. To establish the speed loop model of PMSM servo system, the experimental platform based on DSA was built, then the three-order, four-order and six-order mathematical models of speed loop were obtained. According to these mathematical models the PI parameters of speed controller were adjusted. Then the results of parameter tuning were input into servo driver. In final the speed step response was measured by DSA to evaluate the performance of system. Experimental results demonstrate that the presented method is feasible and effective. By the DSA-based experimental modeling method, the established mathematical model conforms to the frequency response characteristic of speed loop in PMSM servo system, and it can be applied to the design, performance analysis and parameters tuning of the servo system.
PMSM servo system; speed loop; modeling; dynamic signal analyzer
2015-06-22
國家自然科學基金項目(51465005);廣西制造系統與先進制造技術重點實驗室項目(14-045-15S09)
TM341;TM351
A
1004-7018(2016)04-0052-04
潘海鴻(1966-),博士,教授,研究方向為高速高精度運動控制、數控技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
