基于Cosserat彈性桿理論的柔性線纜物理建模方法
2016-11-30 02:07:40林海立劉檢華唐承統(tǒng)劉佳順
圖學學報 2016年1期
林海立, 劉檢華, 唐承統(tǒng), 劉佳順
(北京理工大學機械與車輛學院,北京 100081)
基于Cosserat彈性桿理論的柔性線纜物理建模方法
林海立, 劉檢華, 唐承統(tǒng), 劉佳順
(北京理工大學機械與車輛學院,北京 100081)
針對虛擬環(huán)境中線纜敷設過程仿真的線纜建模問題,提出一種基于Cosserat彈性桿理論的柔性線纜物理建模方法。該方法在線纜離散模型的基礎上根據(jù)Cosserat彈性桿理論導出線纜的總體勢能,并通過優(yōu)化算法得到線纜總體勢能最小時的線纜形態(tài),即線纜的平衡狀態(tài)。模型考慮到線纜的柔性和連續(xù)性,能夠模擬線纜的彎曲和扭轉變形;通過對線纜進行離散表達,實現(xiàn)了對線纜總體勢能的數(shù)值求解;引入罰函數(shù)將求解線纜總體勢能最小值問題轉化為非線性無約束優(yōu)化問題;非線性無約束優(yōu)化問題的求解采用信賴域方法,提高了求解的穩(wěn)定性。設計并開發(fā)了虛擬環(huán)境中的線纜敷設過程仿真原型系統(tǒng),并進行實例驗證,證明該方法的可行性。
線纜;物理建模;敷設仿真;Cosserat彈性桿理論;能量最小
作為能量和信號的傳輸通道,線纜在機電產(chǎn)品中應用廣泛,而線纜的布局和敷設安裝質量直接影響機電產(chǎn)品的質量及可靠性。近年來,隨著CAD技術的發(fā)展,在虛擬環(huán)境中進行線纜布局設計與敷設過程仿真逐漸成為國內外的研究熱點。
在工程應用中,線纜具有復雜的拓撲結構,涵蓋了大量的幾何拓撲信息、工程語義信息和分散的布線信息[1]。柔性線纜的模型表達是進行虛擬環(huán)境下線纜敷設過程仿真的基礎,該模型不僅要支持電纜的幾何和拓撲特性,還要支持線纜的物理特性表達,并滿足虛擬現(xiàn)實系統(tǒng)特有的實時性要求。與布料和人體組織等柔性體不同,線纜最大的特點是其長度通常遠大于直徑,工程中通常以線纜的中心線為掃描路徑,以一定的截面信息掃描來形成線纜的三維模型,因此中心線的確定是線纜建模的關鍵,先前表示線纜的中心線的方法包括折線段,或自由曲線如貝塞爾曲線、B樣條曲線[2-3]等,但這些方法屬于線纜的幾何建模,沒有考慮線纜的物理屬性,進行線纜敷設過程仿真時缺乏真實性。
柔性物體建模與仿真研究一直受到國內外學者的關注,IEEE(computer graphics and applications) 與SIGGRAPH曾數(shù)次召開專門的小組討論會對該方向進行探討[4]。由于柔性物體的形狀不像剛體那樣固定不變,而是隨著外界條件的不同發(fā)生改變,因此建模難度很大。線纜物理建模是典型的柔性體的物理建模,由于線纜敷設過程中,其整體的運動與機器人機械臂的運動具有相似性,基于該思想,魏發(fā)遠等[5]提出了一種基于蛇形機器人的線纜建模與敷設仿真方法,將來源于機器人理論的逆運動學方法應用于線纜建模中。德國學者Hergenr?ther 和D?hne[6]開發(fā)的虛擬裝配系統(tǒng)中采用了類似的模型,通過一系列相連接的剛性桿表示線纜,每個連接處稱為關節(jié),在關節(jié)處加入扭簧和質點以考慮抗彎剛度和重力這兩個物理屬性,當線纜端部移動到某一位置時,采用能量優(yōu)化法和逆運動學方法,求解出每一關節(jié)所應有的變量并使系統(tǒng)具有最小能量。以上建模方法能夠體現(xiàn)線纜在敷設仿真過程中“長度不變”的性質,但考慮的線纜物理參數(shù)較少,真實性不足。
能量曲線方法由加拿大學者 Terzopoulos和Qin[7]提出,其認為曲線具有質量和抗彎特性,在一定的約束下,當曲線具有最小物理變形能時曲線處于穩(wěn)定狀態(tài),因此通過數(shù)學規(guī)劃或優(yōu)化方法得到具有最小物理變形能的曲線,將該曲線作為線纜的中心線,即可得到處于穩(wěn)定狀態(tài)的線纜。王志斌等[8]在線纜布局設計中利用該模型對線纜的長度進行取樣,解決了線纜取樣長度不精確的問題。
彈簧質點模型[9-11]在線纜建模與敷設仿真中有較多應用,該模型具有易于實施、計算效率高的優(yōu)點。在該方法中線纜由一系列質點和連接質點的直線彈簧表示,在質點處加入扭簧或者在兩個質點間隔加入直線彈簧,可以考慮線纜的抗彎剛度。在彈簧質點模型解算方面,Loock等[12]在Baraff基礎上采用隱式計算,該算法允許較長的時間步,具有較強的實時性,但真實性無法保證。
由于逆運動學、能量曲線和彈簧質點模型在處理線纜受約束形變時部分考慮了線纜的物理屬性,具有一定真實性且具有實時性強的特點,是目前線纜敷設仿真中主要采用的物理模型。但以上建模方法考慮線纜物理屬性并不全面,其中最重要的是不能對線纜的扭轉變形進行模擬,使得在線纜敷設過程仿真中其真實性并不十分理想。
線纜在敷設過程中的局部應變很小,基本保持在材料的彈性范圍內,因此有學者將其本構關系抽象為彈性關系,并用彈性桿模型進行線纜物理建模。彈性細桿靜力學理論是Kirchhoff于1859年建立的,工程中繩索、鉆桿、纖維等都曾將彈性細桿作為其力學模型[13]。劉檢華等[14]提出的以Kirchhoff彈性細桿非線性力學理論為基礎的虛擬環(huán)境下活動線纜建模與運動仿真方法,對活動線纜的仿真有較好的效果,但該方法需求解微分方程組的邊界值,并利用“打靶法”在已知兩端位置和朝向的基礎上對線纜的整體外形進行求解,其問題是求解所需要的初值難以給定,而且求解時間較長,無法滿足線纜敷設過程仿真的實時性需求。在物理模型求解方面,Bertails等[15]利用離散方法求解Kirchhoff方程,并提出一種離散和連續(xù)相結合的模型,將發(fā)絲模擬為一系列相連的螺旋曲線段,由通用坐標描述線纜,并用積分的方法重構線纜,從而消除了加入長度不變約束產(chǎn)生的硬度,提高了數(shù)值求解的穩(wěn)定性,該方法為目前較為先進的彈性桿建模方法。而 Bergou等[16]采用離散微分幾何的方法,顯示以最少自由度的簡化坐標方程表示線纜的中心線,并以標量表達線纜材料框架,以避免使用聯(lián)系中心線和材料框架的硬化約束。
Cosserat理論作為Kirechhoff理論的改進,考慮了彈性桿的軸向線應變和彎曲剪應變等物理參數(shù),建立更精確的平衡方程。Cosserat理論由Cosserat兄弟于19世紀提出,目前該方法已經(jīng)成為非線性彈性力學的基本方法。Cosserat理論首先由 Pai[17]用于彈性桿這類細長的可變形結構的建模,該方法同樣需通過“打靶法”數(shù)值求解微分方程得到桿的靜態(tài)外形;由于數(shù)值解法在初始條件上難以確定,同時在處理自接觸和與其他物體接觸的問題上也存在困難,之后的方法多關注于模型的離散表達。Spillmann和Teschner[18]提出用于柔性桿動力學模型,該模型以Cosserat理論為基礎導出桿件的連續(xù)能量表達式,通過對桿的離散計算出桿的每個單元具有的能量,進而由拉格朗日方程得到桿的動力學微分方程,數(shù)值求解該微分方程得到桿的動態(tài)變化。由于動力學模型需要較長時間進入穩(wěn)定狀態(tài),黃勁等[19]提出了一個穩(wěn)定、快速的優(yōu)化策略對線纜進行形變模擬,并著重研究了大步長、準靜態(tài)模擬過程中的接觸處理這一關鍵問題。Grégoire 和 Sch?mer[20]提出了通用彈簧質點模型表達線纜這類柔性零件的外形,并以Cosserat理論對其彎曲和扭轉進行建模,通過能量最小化過程求解線纜的平衡狀態(tài),此方法避免了動力學模型中的振動現(xiàn)象,具有較好的穩(wěn)定性。但該方法采用比例積分控制實現(xiàn)模型的定長約束,引入了約束力變量,并通過迭代的方法確定約束力,使得模型變得復雜,降低了求解效率;四元數(shù)標準化約束中,為了避免線纜外形出現(xiàn)“V”形的異常形變,需改變了約束表達式,將四元數(shù)的模變?yōu)槠涞箶?shù),這使得雅克比矩陣變得復雜,降低了求解效率;在優(yōu)化問題求解中級聯(lián)使用了多種優(yōu)化方法以保證算法收斂,但初值的選擇仍對求解效率和算法收斂性影響較大。
本文基于以上研究,提出采用Cosserat彈性桿理論對線纜進行物理建模,考慮敷設仿真中線纜做低速運動,提出了線纜的運動過程仿真可通過每一時刻線纜的靜力學平衡狀態(tài)進行表達,線纜的靜力學平衡狀態(tài)即為線纜具有最小彈性勢能狀態(tài)。可由Cosserat理論推導出線纜的彈性勢能,通過選取適當?shù)牧P因子系數(shù)將約束轉化為罰函數(shù),并通過信賴域方法求解非線性優(yōu)化問題得到線纜具有最小能量的形態(tài)。由于Cosserat彈性桿模型考慮到了彈性桿的彎曲變形,并通過四元數(shù)表示線纜截面的扭轉變形(相對于基于 Kirchhoff彈性桿理論的線纜建模方法,考慮了更多物理特性),因而本文提出的方法更為精確,能夠在線纜敷設過程的仿真中更加真實地表現(xiàn)出線纜的形態(tài)。
1 Cosserat彈性桿模型
線纜是細長的柔性體,實際敷設過程中其應變很小,可以認為其本構關系為彈性關系。因此采用Cosserat彈性桿理論進行線纜物理建模,并對線纜做兩方面的假設:
(1) 幾何方面。在剛性截面假設基礎上,幾何形態(tài)由中心線的移動和截面沿中心線的轉動所體現(xiàn),即將線纜作為一個軸向長度遠遠大于半徑的空間圓柱體進行研究,且需滿足:①中心線在變形前后均為二階以上的光滑曲線;②活動線纜的長度和曲率半徑遠大于橫截面的尺度;③相鄰橫截面可繞中心線作相對扭轉,扭角為連續(xù)函數(shù);④線纜在松弛狀態(tài)下無原始曲率和扭率。
(2) 物理特性方面。將線纜等效為勻質、各向同性的圓截面彈性細桿,滿足以下條件:①桿為均勻各向同性,應力和應變滿足線性本構關系;②橫截面為剛性平面,忽略彎曲引起的剪切變形,橫截面與中心線正交。
1.1彈性桿的空間位姿描述
彈性桿為細長的可變形體,其可以呈現(xiàn)出彎曲、扭轉等復雜的形態(tài)。彈性桿截面的幾何中心連成空間曲線 C稱為彈性桿的中心線,在剛性截面假定基礎上,彈性桿的幾何形態(tài)由截面沿中心線的移動和轉動所體現(xiàn),因此可以通過彈性桿中心線構建出彈性桿的外形。
為了方便描述彈性桿的空間姿態(tài),需要建立多個坐標系。如圖1所示,對于彈性桿的中心線C,以曲線上的一固定點 P0為原點建立弧坐標系 s,以空間中一固定點O建立參考坐標系(O?ξηζ) ,O點到空間中一點的向量為r。在曲線上任意一點P可定義一個依附于曲線的右手坐標系(P?NBT)稱為Frenet坐標系,如圖2所示。其中T為該點處切線方向上的單位矢量,N為該點處的法線方向上的單位矢量,矢量B由B=T×N得到。
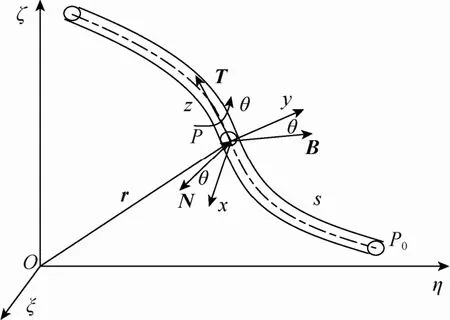
圖1 描述彈性桿的坐標系
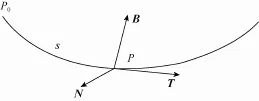
圖2 Frenet坐標系
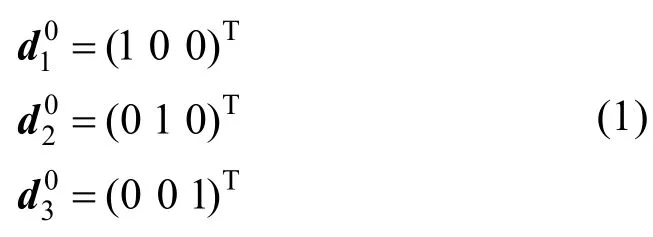
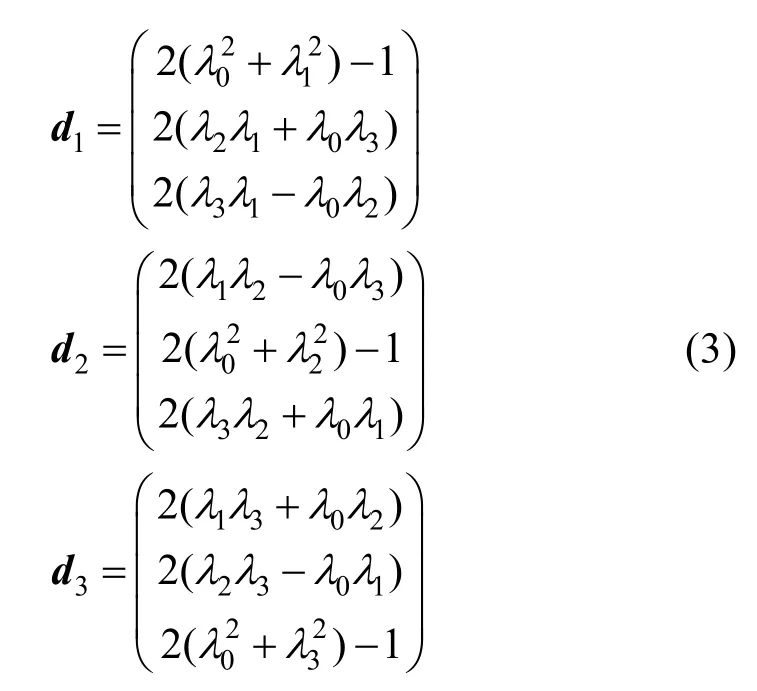
僅通過 Frenet坐標系無法表示線纜的扭轉變形,由于彈性桿的幾何形態(tài)由截面沿中心線的移動和轉動所體現(xiàn),因此在截面中心點 P建立與剛性截面相固連的主軸坐標系(P?xyz),各坐標軸的單位矢量稱為基矢量為d1、d2、d3,其中z軸與P點處的切線軸 T重合,即3= dT。主軸坐標系x軸與Frenet坐標系的N軸的夾角為θ,夾角θ為截面扭轉變形的體現(xiàn)。
1.2主軸坐標系的空間位姿描述
主軸坐標系的姿態(tài)通過參考坐標系的旋轉量表示,本文采用四元數(shù)表示旋轉。
主軸坐標系基矢量為d1、d2、d3,參考坐標系基矢量為即:

1.3彈性桿的彎扭度
彈性桿的彎曲、扭轉變形程度用彎扭度矢量u表示,中心線上任意一點 P處的彎扭度是該點處主軸坐標系的角位移對弧坐標s的變化率。與角速度的概念類似,且不同的是角位移是對時間 t的變化率。彎扭度等價于動點P沿著中心線沿弧坐標正向以單位速度做勻速運動時主軸坐標系的角速度。
在計算中使用四元數(shù)對彎扭度矢量進行表達,Schwab和Meijaard[21]推導出了四元數(shù)與旋轉的角速度矢量的關系為:
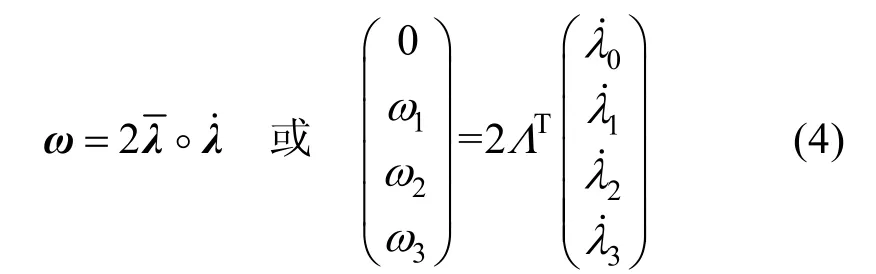
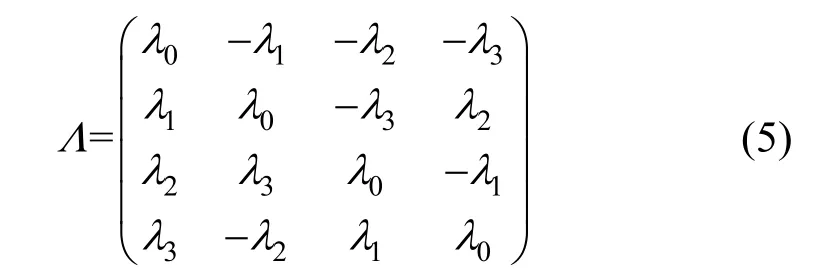
計算得到在主軸坐標系中角速度矢量的各個分量為:
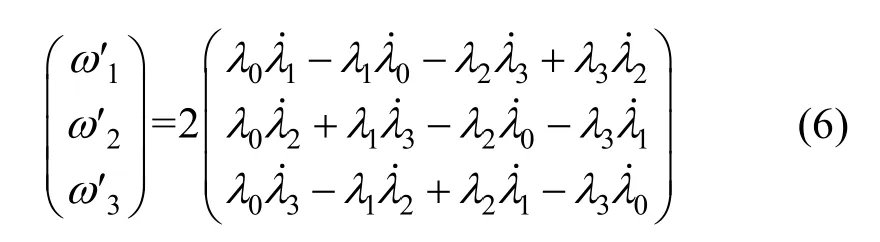
由于彎扭度矢量與角速度都是角位移的變化率,將式(6)中對時間變量t的微分改寫為對弧坐標s的微分,可以得到彎扭度矢量u在主軸坐標系中的表達:
1.4彈性桿的能量表達式
處于平衡狀態(tài)的曲桿只具有彈性勢能,所以無需考慮運動過程中的動能以及耗散能。彈性勢能包括拉伸形變具有的彈性勢能 Vs和彎曲、扭轉形變具有的彈性勢能 Vb。文獻[18]給出彈性桿的Cossserat理論中彈性勢能表達,得到拉伸形變具有的彈性勢能Vs的表達式為:

其中剪切變形被忽略。ks為抗拉剛度,其與拉伸楊氏模量Es有關,可通過計算得到。
彎曲和扭轉變形所具有的彈性勢能Vb與彎扭度矢量有關,見式(9):

其中,E為彎曲變形中的楊氏模量,G為扭轉變形時的切變模量,r為截面半徑。
對于理想桿,拉伸變形中的楊氏模量 Es等于彎曲變形時的楊氏模量E,由于實際線纜中存在多條線纜組成的線束,其截面并不均勻而且存在空隙,在實際測量中線纜拉伸時的楊氏模量 Es相比于彎曲時的楊氏模量E大。
1.5模型的約束
Cosserat桿模型是具有內在約束的系統(tǒng),由于中心線上任意一點處的切線方向與該點處主軸坐標系的基矢量 d3的方向相同,所以存在方向一致約束:

對于四元數(shù)λ,只有當其模等于1時,才能表示為純轉動,因此存在四元數(shù)的標準化約束:

2 線纜的離散模型
在給出的Cosserat彈性桿的連續(xù)模型,包含兩個關于彈性勢能的積分式(8)和(9)以及兩個對坐標的約束式(11)和(12)。在Cosserat彈性桿的應用中通常采用離散模型,文獻[18]將彈性桿中心線離散為節(jié)點和線段,文獻[19]采用彈簧質點模型模擬彈性桿。本文,采用Cosserat彈性桿理論建立線纜物理模型,并對線纜進行離散表達,根據(jù)線纜截面的剛性假設,線纜的幾何形態(tài)由中心線決定。離散之后的線纜中心線為折線,已知各折線段中點的四元數(shù)和折線頂點的坐標,用代數(shù)式表達折線上各點的四元數(shù)和坐標,通過數(shù)值計算得到線纜的總能量。
2.1中心線的離散
如圖3所示,對于沒有分支的線纜取其中心線上的N個節(jié)點,順序連接這些節(jié)點得到N?1條中心線段。第i個節(jié)點的位置由參考坐標系原點到節(jié)點的向量[1,N]表示,第j條中心線段對應的四元數(shù)由1]表示。

圖3 線纜的離散模型
在對線纜進行離散后,式(8)和(9)中的微分項可以近似求出。第i與i+1個節(jié)點間的空間向量ir對弧坐標s的微分為:

其中,li是線纜處于自然狀態(tài)時,第i條中心線段的長度。
第j條中心線段上四元數(shù)對弧坐標s的微分為:
其中,lj是曲桿處于自然狀態(tài)時,第j條和第j+1條中心線段和的一半。
計算中近似給出第j條中心線段上任意一點處的四元數(shù)為:

2.2離散模型的能量表達式
將式(13)帶入式(8)中,對第i條中心線段在長度li上進行積分,得到拉伸變形具有的彈性勢能為:
將彎扭度用四元數(shù)表示,對第j條中心線段在長度lj上積分,得到彎曲、扭轉變形具有的彈性勢能為:
將上式代入式(14)和(15)可以進一步計算出到第j條中心線段彎曲、扭轉變形具有的彈性勢能,假設線纜在松弛狀態(tài)下無原始彎扭度,那么uk(1≤k≤3)都為0。
3 求解離散模型的平衡狀態(tài)
線纜敷設仿真中的核心是解決在線纜定長的情況下,其某一點運動時對線纜其他點的“聯(lián)動”位置求解(即線纜的運動過程求解)[22]。Spillmann 和 Teschner[18]采用動力學方法求解彈性桿的運動過程,其方法存在振動現(xiàn)象,與現(xiàn)實中的線纜運動有一定差別,另外動力學方法中的時間步選擇不當還會導致計算效率過低或結果不收斂。在線纜敷設過程中,對線纜的操作大多是在低速下完成的,沒有明顯的振動現(xiàn)象發(fā)生,忽略速度造成的影響認為其處于靜力學平衡狀態(tài),所以線纜敷設仿真的關鍵是求解線纜處于平衡狀態(tài)時的形態(tài)。
本文通過求解線纜彈性勢能的優(yōu)化問題,獲得其有最小彈性勢能的姿態(tài),即線纜的平衡狀態(tài)。其中線纜的彈性勢能由Cosserat理論推導得出,并由罰函數(shù)將優(yōu)化問題轉化為無約束優(yōu)化問題,最后采用信賴域方法對該優(yōu)化問題進行求解。
3.1線纜彈性勢能優(yōu)化模型
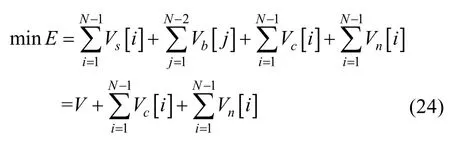
通過式(16)和(17)計算出彈性桿具有的彈性勢能為:
在一定約束下,當線纜具有最小彈性勢能時,其處于平衡狀態(tài)。本文通過求彈性勢能 V的最小值,得到彈性桿的平衡狀態(tài)。屬于約束非線性最優(yōu)化問題,優(yōu)化模型為:

3.2優(yōu)化模型中的約束施加
模型中存在多個等式約束,在處理計算機圖形學約束的模型時,常用到罰函數(shù)方法。對于等式約束C(x)=0,將其轉化為二次能量項加入目標函數(shù)中。當解不滿足約束條件時,就增加目標函數(shù)的值。
其中方向一致約束變?yōu)椋?/p>

四元數(shù)標準化約束變?yōu)椋?/p>

在離散模型中對式(22)和(23)進行計算,得到每一段的罰函數(shù)能量表達式,其中方向一致約束為:
四元數(shù)標準化約束為:
引入罰函數(shù)把約束改寫能量表達式(22)和(23),將約束最優(yōu)化式(19)轉化為無約束最優(yōu)化問題:
文獻[20]指出當抗彎剛度 kb1、kb2和抗扭剛度kb3較大時,彈性桿會發(fā)生“V”形的變形,其原因為彎曲和扭轉變形集中于發(fā)生急劇變形處,其他部分不發(fā)生形變,導致“V”形部分的四元數(shù)的模接近于零。解決方法為改變四元數(shù)標準化約束能量式為:

當四元數(shù)的模為零時,能量將會變?yōu)闊o窮大,從而避免了以上問題的發(fā)生。但此方法會增加求解的困難,降低求解的效率。實際上產(chǎn)生上述問題的原因在于抗彎剛度和抗扭剛度過大使得罰函數(shù)的約束作用消失,通過增大罰函數(shù)罰因子系數(shù)同樣可以防止這種情況發(fā)生,從而避免了改寫四元數(shù)標準化約束形式引起的求解困難。
3.3能量優(yōu)化模型的求解
文獻[20]在一次求解步驟中順序地采用了5種優(yōu)化算法,即牛頓-高斯法、非線性共軛梯度法、線性共軛梯度法、最速下降法、一維搜索法,以保證得到能量優(yōu)化問題的最優(yōu)解。因為其原因是牛頓-高斯法只有初始值和最優(yōu)解足夠接近時,才能收斂。線纜的空間形態(tài)復雜,用以表示線纜形態(tài)的狀態(tài)量較多,如式(24)中存在較多的變量,其初值往往難以給定,如果初始點與最優(yōu)值差別較大,采用以上方法無法求得最優(yōu)解。為了避免初始點選取的困難,本文采用信賴域方法[23],該算法為全局收斂方法,對初始點要求不高,使用該方法求解具有較高的穩(wěn)定性。
3.4算法的計算效率
確保線纜模型求解的實時性是實現(xiàn)虛擬環(huán)境下線纜敷設過程仿真必須滿足的要求,在確定罰函數(shù)罰因子系數(shù)及終止條件后,求解的效率主要由采用的優(yōu)化算法決定。信賴域方法是全局收斂算法,初值不影響最優(yōu)值的取得,但對求解時間有較大影響。當初值在最優(yōu)值附近時,求解速度較快,由于操作過程相鄰位置線纜狀態(tài)變化不大,因此可將前一位置的線纜狀態(tài)作為其后線纜位姿求解的初值,能夠顯著提高求解效率。圖 4所示為17個位置求解時間,由于模型求解的第一位置,初值任意給定,求解時間較長,其后各位置求解耗時降低(計算時間控制在60 ms),滿足了實時性要求。
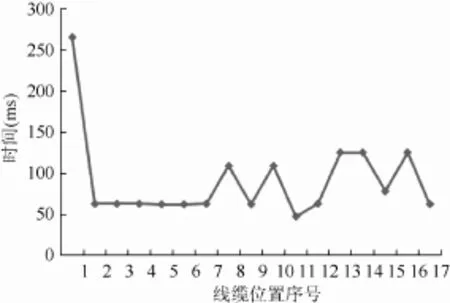
圖4 線纜各位置求解時間
4 線纜敷設仿真實例驗證
采用本文提出的方法,開發(fā)了虛擬環(huán)境中的線纜敷設過程仿真軟件系統(tǒng),系統(tǒng)采用2.80 GHz Intel Core i5-2300 CPU,顯卡為NVIDIA GeForce GT 240,內存4 GB,操作系統(tǒng)為Window 7 SP1。
該系統(tǒng)利用三維造型引擎 ACIS和三維顯示交互工具包HOOPS建立三維環(huán)境,其中的結構件模型是在Pro/E中建模,并通過數(shù)據(jù)轉換接口導入到本系統(tǒng)中。線纜的外形由物理模型計算得出,使用Matlab優(yōu)化工具箱(Optimation Toolbox)求解模型中的能量優(yōu)化問題,利用Matlab與C++的混合編程實現(xiàn)算法集成,以鍵盤和鼠標為輸入設備,實現(xiàn)對線纜及其他虛擬物體的裝配操作。
彈簧質點、能量曲線及逆運動學模型無法對線纜扭轉變形進行模擬,但本文提出的物理模型能模擬這種形變,圖 5所示為線纜操作中接頭旋轉,可真實反映線纜的扭轉變形,并與真實情況相符。

圖5 線纜插裝操作
對于多根線纜在敷設過程中通常需要捆扎,操作扎帶可以帶動線纜一起運動,捆扎效果如圖6所示。
線纜敷設過程仿真實例如圖 7所示,首先將所需的結構件模型和線纜模型導入虛擬環(huán)境中;然后將線纜移動到裝配位置附近,操作接頭可對接頭進行插裝,之后通過卡箍將線纜固定到結構件上,對于多根線纜用扎帶進行捆扎,最終完成線纜的敷設。
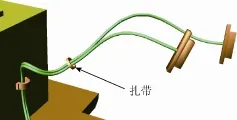
圖6 線纜捆扎及扎帶調整
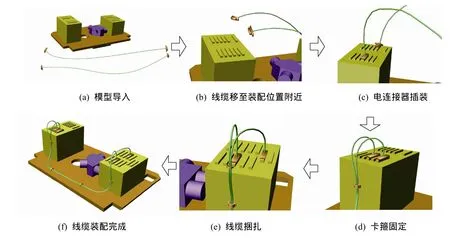
圖7 線纜敷設過程仿真實例
5 結 論
(1) 針對面向柔性線纜敷設過程仿真的線纜物理建模問題,提出并建立了基于Cosserat彈性桿理論的柔性線纜物理模型,其考慮了線纜的彎曲和扭轉變形,能夠對敷設過程中線纜的形變進行真實的模擬。
(2) 通過罰函數(shù)方法對模型中的約束進行轉化,選取適當?shù)牧P因子系數(shù),實現(xiàn)了模型中的四元數(shù)標準化約束和方向一致約束。
(3) 采用信賴域方法求解線纜模型中的非線性優(yōu)化問題,該方法具有全局收斂特性,避免了初始點難以確定的問題,并采用將上一位置的線纜狀態(tài)作為線纜下一位置模型計算的初始點的方法,提高了線纜物理模型求解的效率,滿足了虛擬環(huán)境下線纜敷設仿真的實時性要求。
(4) 開發(fā)了虛擬環(huán)境中的線纜敷設過程仿真軟件系統(tǒng),通過實例驗證了線纜物理模型的可行性,后續(xù)工作將考慮建立分支線纜的物理模型。
[1] 王發(fā)麟, 廖文和, 郭宇, 等. 復雜機電產(chǎn)品線纜信息本體表達與存儲分析[J]. 圖學學報, 2015, 36(3): 376-383.
[2] 劉檢華, 萬畢樂, 寧汝新. 虛擬環(huán)境下基于離散控制點的線纜裝配規(guī)劃技術[J]. 機械工程學報, 2006, 42(8): 125-130.
[3] 楊守勇. 三維線纜建模及布線設計的研究與實現(xiàn)[D].大連: 大連理工大學, 2012.
[4] Eischen J W, Deng S, Clapp T G. Finite-element modeling and control of flexible fabric parts [J]. IEEE Computer Graphics and Applications, 1996, 16(5): 71-80.
[5] 魏發(fā)遠, 王峰軍, 陳新發(fā). 含有柔性電纜的復雜系統(tǒng)裝配仿真[J]. 工程設計學報, 2007, 14(1): 25-31.
[6] Hergenr?ther E, D?hne P. Real-time virtual cables based on kinematic simulation [C]//WSCG ’2000, The 8th International Conference in Central Europe on Computer Graphics, Visualization and Interactive Digital Media 2000. Plzen, Czech Republic, 2000: 402-409.
[7] Terzopoulos D, Qin H. Dynamic NURBS with geometricconstraints for interactive sculpting [J]. ACM Transactions on Graphics (TOG), 1994, 13(2): 103-136.
[8] 王志斌, 劉檢華, 劉佳順, 等. 電纜虛擬布線中的物理特性分析與布局設計技術[J]. 計算機輔助設計與圖形學學報, 2014, 26(7): 1193-1202.
[9] 尚煒, 寧汝新, 劉檢華, 等. 復雜機電產(chǎn)品中的柔性線纜裝配過程仿真技術[J]. 計算機輔助設計與圖形學學報, 2012, 24(6): 822-831.
[10] 王志斌. 虛擬環(huán)境下基于物理屬性的線纜布局與裝配仿真技術[D]. 北京: 北京理工大學, 2014.
[11] 王志斌, 劉檢華, 劉佳順, 等. 面向電纜虛擬裝配仿真的多分支彈簧質點模型[J]. 機械工程學報, 2014, 50(3): 174-183.
[12] Loock A, Sch?mer E, Stadtwald I. A virtual environment for interactive assembly simulation: from rigid bodies to deformable cables [C]//5th World Multiconference on Systemics, Cybernetics and Informatics (SCI’01). Orlando, Florida, USA, 2001: 325-332.
[13] 劉延柱. 彈性細桿非線性力學[M]. 北京: 清華大學出版社, 2006: 15-19.
[14] 劉檢華, 趙濤, 王春生, 等. 虛擬環(huán)境下的活動線纜物理特性建模與運動仿真技術[J]. 機械工程學報, 2011, 47(9): 117-124.
[15] Bertails F, Audoly B, Cani M P, et al. Super-helices for predicting the dynamics of natural hair [J]. ACM Transactions on Graphics (TOG), 2006, 25(3): 1180-1187.
[16] Bergou M, Wardetzky M, Robinson S, et al. Discrete elastic rods [J]. ACM Transactions on Graphics (TOG), 2008, 27(3): 63:1-63:12.
[17] Pai D K. Strands: interactive simulation of thin solids using cosserat models [J]. Computer Graphics Forum, 2002, 21(3): 347-352.
[18] Spillmann J, Teschner M. C o R d E: Cosserat rod elements for the dynamic simulation of one-dimensional elastic objects [C]//Proceedings of the 2007 ACM SIGGRAPH, Eurographics Symposium on Computer Animation. Eurographics Association, 2007: 63-72.
[19] 黃勁, 沈中偉, 王青, 等. 基于優(yōu)化的大步長準靜態(tài)線纜模擬[J]. 計算機輔助設計與圖形學學報, 2011, 23(1): 1-10.
[20] Grégoire M, Sch?mer E. Interactive simulation of one-dimensional flexible parts [J]. Computer-Aided Design, 2007, 39(8): 694-707.
[21] Schwab A L, Meijaard J P. How to draw Euler angles and utilize Euler parameters [C]//ASME 2006 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, 2006: 259-265.
[22] 劉檢華, 萬畢樂, 孫剛, 等. 線纜虛擬布線與敷設過程仿真技術[J]. 計算機集成制造系統(tǒng), 2012, 18(4): 787-795.
[23] 張光澄, 王文娟, 韓會磊, 等. 非線性優(yōu)化計算方法[M]. 北京: 高等教育出版社, 2005: 146-159.
Physical Characteristic Oriented Modeling for Flexible Cable Harness Based on Cosserat Elastic Rod Theory
Lin Haili,Liu Jianhua,Tang Chengtong,Liu Jiashun
(School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
To simulate laying process of cable harness, a physical characteristic oriented modeling for flexible cable harness is proposed based on Cosserat elastic rod theory. The cable’s total energy is obtained by applying Cosserat elastic rod theory on discrete cable model. The cable’s configuration with the lowest energy can be obtained by using optimization algorithm, which is the equilibrium state. The model takes into consideration the flexibility and continuity of the cable, which could simulate bending and twisting. From the discrete expression of the cable, the cable’s energy can be calculated by numerical method. And penalty method is used to convert the constraint problem to an unconstrained problem. The trust region algorithm is implemented to get the configuration of the cable with minimum potential energy. This method is applied in the simulation of cable laying process in a virtual environment and a prototype system is developed, and the model is validated by this system.
cable harness; physical modeling; laying simulation; Cosserat elastic rod theory; energy minimizing
TP 391.9
10.11996/JG.j.2095-302X.2016010034
A
2095-302X(2015)01-0034-09
2015-09-24;定稿日期:2015-10-15
林海立(1991–),男,四川西昌人,碩士研究生。主要研究方向為計算機輔助設計。E-mail:linhailisc@163.com
劉檢華(1977–),男,江西萍鄉(xiāng)人,教授,博士,博士生導師。主要研究方向為復雜產(chǎn)品裝配與檢測。E-mail:jeffliu@bit.edu.cn
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
中學生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56