線電壓確定無刷直流電動(dòng)機(jī)轉(zhuǎn)子位置新方法
2016-11-30 02:17:29馬鐵華呂彩琴
微特電機(jī) 2016年2期
關(guān)鍵詞:方法
殷 帥,馬鐵華,呂彩琴
(中北大學(xué),太原 030051)
?
線電壓確定無刷直流電動(dòng)機(jī)轉(zhuǎn)子位置新方法
殷 帥,馬鐵華,呂彩琴
(中北大學(xué),太原 030051)
針對無位置傳感器無刷直流電動(dòng)機(jī)控制問題,提出一種基于線電壓的轉(zhuǎn)子位置檢測新方法。依據(jù)繞組電壓方程,給出了電機(jī)反電動(dòng)勢計(jì)算方法。通過采樣電機(jī)線電壓,得出反電動(dòng)勢計(jì)算值,確定電機(jī)換相時(shí)刻。為解決反電動(dòng)勢計(jì)算值中窄脈沖引起過零點(diǎn)誤判的問題,依據(jù)反電動(dòng)勢變化率在換相時(shí)刻遠(yuǎn)大于非換相時(shí)刻的原理,采用反電動(dòng)勢變化率檢測法判斷過零點(diǎn)時(shí)刻。仿真和實(shí)驗(yàn)結(jié)果顯示該方法能夠準(zhǔn)確提供轉(zhuǎn)子位置信息,在負(fù)載轉(zhuǎn)矩恒定和突變情況下無換相錯(cuò)誤等異常情況,表明該方法具有良好的適應(yīng)性和可靠性。
無刷直流電動(dòng)機(jī);無位置傳感器控制;線電壓;反電動(dòng)勢變化率檢測
0 引 言
無位置傳感器無刷直流電動(dòng)機(jī)以其高效率、結(jié)構(gòu)緊湊、抗干擾能力強(qiáng)、大功率密度和優(yōu)越的調(diào)速性能等優(yōu)點(diǎn),在汽車、家用電器、航空航天中取得了廣泛的應(yīng)用[1]。如何在沒有位置傳感器前提下準(zhǔn)確獲取電機(jī)轉(zhuǎn)子位置信息,成為無位置傳感器無刷直流電動(dòng)機(jī)研究熱點(diǎn)之一。現(xiàn)有的轉(zhuǎn)子位置檢測法有反電動(dòng)勢法[2-7]、電感法[8-9]、磁鏈法[10-11]等,其中反電動(dòng)勢法是目前技術(shù)最為成熟,應(yīng)用最為廣泛的方法。
文獻(xiàn)[2-4]提出一種基于線反電動(dòng)勢的轉(zhuǎn)子位置檢測方法。其中,文獻(xiàn)[3]在確定線反電動(dòng)勢上升到最大值時(shí)為換相時(shí)刻的基礎(chǔ)上,通過采樣線電壓和相電流來獲取換相點(diǎn)。該方法由于不采用過零點(diǎn)檢測,使其不用相移,但實(shí)際線反電動(dòng)勢波形在平頂處有毛刺,容易引起換相信號的誤判,降低了系統(tǒng)的可靠性。且該方法不僅需要檢測相電流,還需要檢測相電壓,增加了控制系統(tǒng)成本。文獻(xiàn)[4]雖能很好地給出轉(zhuǎn)子位置信息,但硬件中需要增加相電流、線電壓檢測模塊,且軟件中還需要積分運(yùn)算,增加了控制單元的CPU消耗。端電壓檢測法[5]實(shí)現(xiàn)簡單,只需經(jīng)軟件計(jì)算或硬件電路即可獲得反電動(dòng)勢過零點(diǎn),然后延遲π/6電角度即為換相時(shí)刻。但實(shí)際電路中,無刷直流電動(dòng)機(jī)中性點(diǎn)往往不引出,使得端電壓不易獲取,導(dǎo)致該方法的實(shí)用性不高。文獻(xiàn)[6-7]提出一種通過采樣線電壓實(shí)現(xiàn)反電動(dòng)勢過零點(diǎn)檢測的無位置傳感器無刷直流電動(dòng)機(jī)換相控制方法。
為準(zhǔn)確給出該電機(jī)轉(zhuǎn)子位置信息,這里提出一種基于線電壓的無刷直流電動(dòng)機(jī)無位置傳感器控制方法。該方法通過檢測線電壓,只需簡單的求和運(yùn)算即可給出反電動(dòng)勢計(jì)算值,再通過軟件獲取反電動(dòng)勢的過零點(diǎn),確定轉(zhuǎn)子位置信息。該方法僅需檢測線電壓,易于硬件實(shí)現(xiàn),且軟件運(yùn)算簡單,對控制CPU消耗低。最后通過仿真和實(shí)驗(yàn)驗(yàn)證了該方法的可靠性和實(shí)用性。
1 基于線電壓的換相控制實(shí)現(xiàn)
1.1 無刷直流電動(dòng)機(jī)數(shù)學(xué)模型
無刷直流電動(dòng)機(jī)繞組相電壓由電阻壓降、交變電流引起的繞組自感電動(dòng)勢、繞組間互感電動(dòng)勢和繞組磁通量變化引起的感應(yīng)電動(dòng)勢組成。
以a相繞組為例,該相繞組相電壓可表示:
(1)
式中:R為a相繞組電阻;L為a相繞組自感與互感差;ia為a相繞組的電流;un為中性點(diǎn)電壓。
假設(shè)每相繞組參數(shù)相同,無刷直流電動(dòng)機(jī)三相繞組相電壓可表示:
(2)
式中:ua,ub,uc為三相繞組相電壓;ia,ib,ic為三相繞組電流;ea,eb,ec為三相反電動(dòng)勢;R為每相繞組電阻;L為每相繞組自感與互感差。
在實(shí)際工程中,無刷直流電動(dòng)機(jī)中性點(diǎn)一般不引出,使得相電壓不方便測量,而線電壓可以通過測量功率器件導(dǎo)通時(shí)直流側(cè)電壓獲得,易于測量,線電壓可表示:
(3)
在忽略電機(jī)機(jī)械損耗和雜散損耗時(shí),無刷直流電動(dòng)機(jī)電磁功率全部轉(zhuǎn)化為轉(zhuǎn)子動(dòng)能做功,電機(jī)轉(zhuǎn)矩可表示:
(4)
式中:Te為電磁轉(zhuǎn)矩;ω為電機(jī)機(jī)械角速度。
三相繞組星型連接無刷直流電動(dòng)機(jī)等效電路如圖1所示。圖中的電流、電感、反電動(dòng)勢方向?yàn)橛?jì)算時(shí)參考方向。
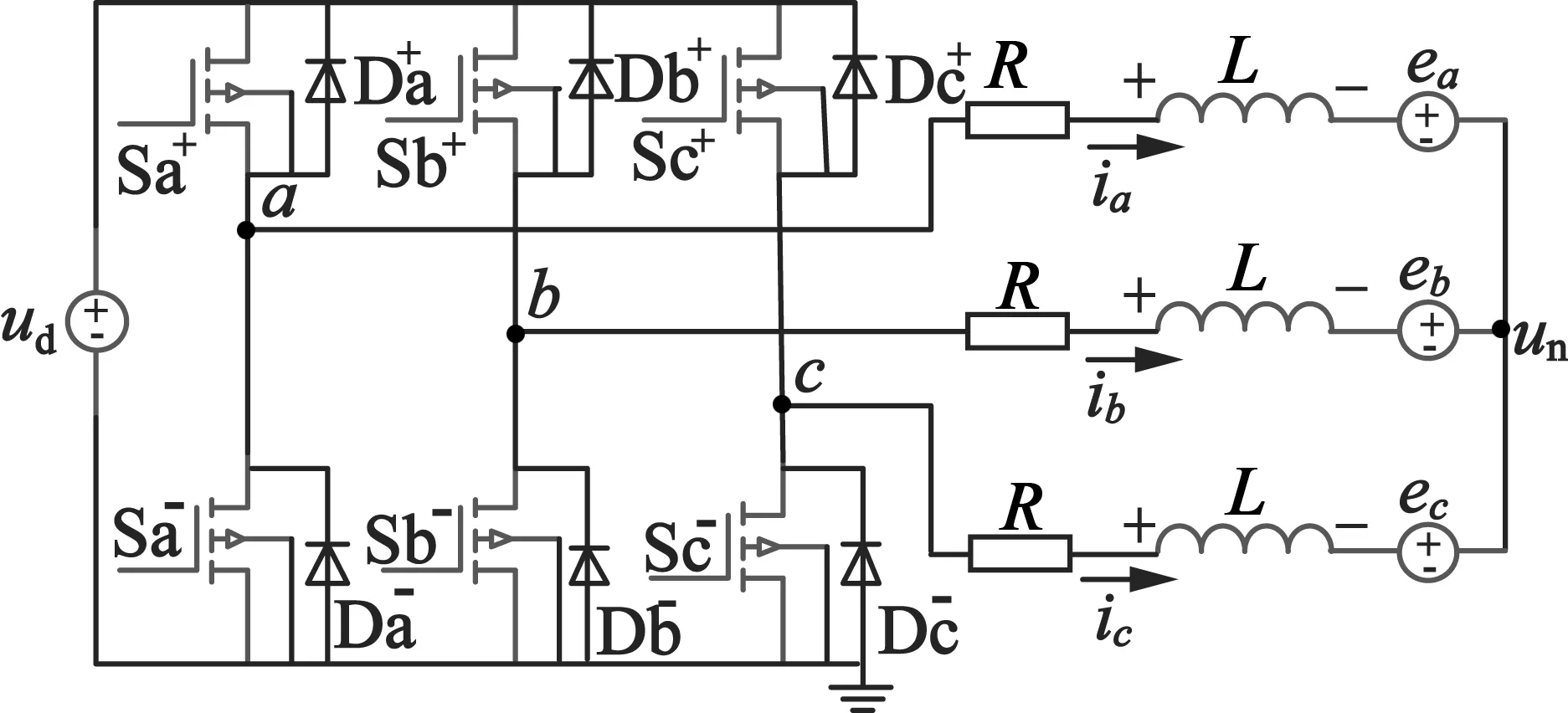
圖1 星型連接無刷直流電動(dòng)機(jī)等效電路
1.2 控制方法原理
兩兩導(dǎo)通下電機(jī)相電流和三相反電動(dòng)勢關(guān)系[12]如圖2所示。圖中圓圈標(biāo)注地方為反電動(dòng)勢過零點(diǎn)時(shí)刻,根據(jù)相電流和反電動(dòng)勢對應(yīng)關(guān)系,可知無刷直流電動(dòng)機(jī)在過零點(diǎn)后延遲30°電角度即為電機(jī)的換相時(shí)刻,因此通過檢測反電動(dòng)勢過零點(diǎn)來實(shí)現(xiàn)換相控制是可行的。
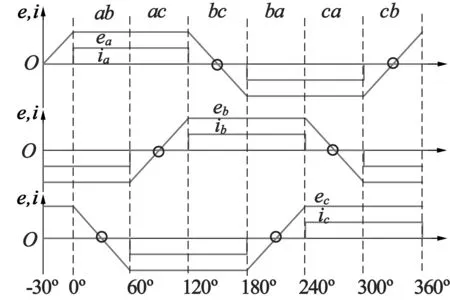
圖2 梯形波反電動(dòng)勢及繞組相電流波形圖
然而,由于無刷直流電動(dòng)機(jī)反電動(dòng)勢為感應(yīng)電勢,且電機(jī)運(yùn)行時(shí)三相繞組加載相電壓,這使得反電動(dòng)勢不易直接測量。為此,這里提出一種通過測量線電壓實(shí)現(xiàn)反電動(dòng)勢間接觀測方法。
以ab相導(dǎo)通、c相懸空時(shí)刻說明通過基于線電壓的反電動(dòng)勢檢測原理。
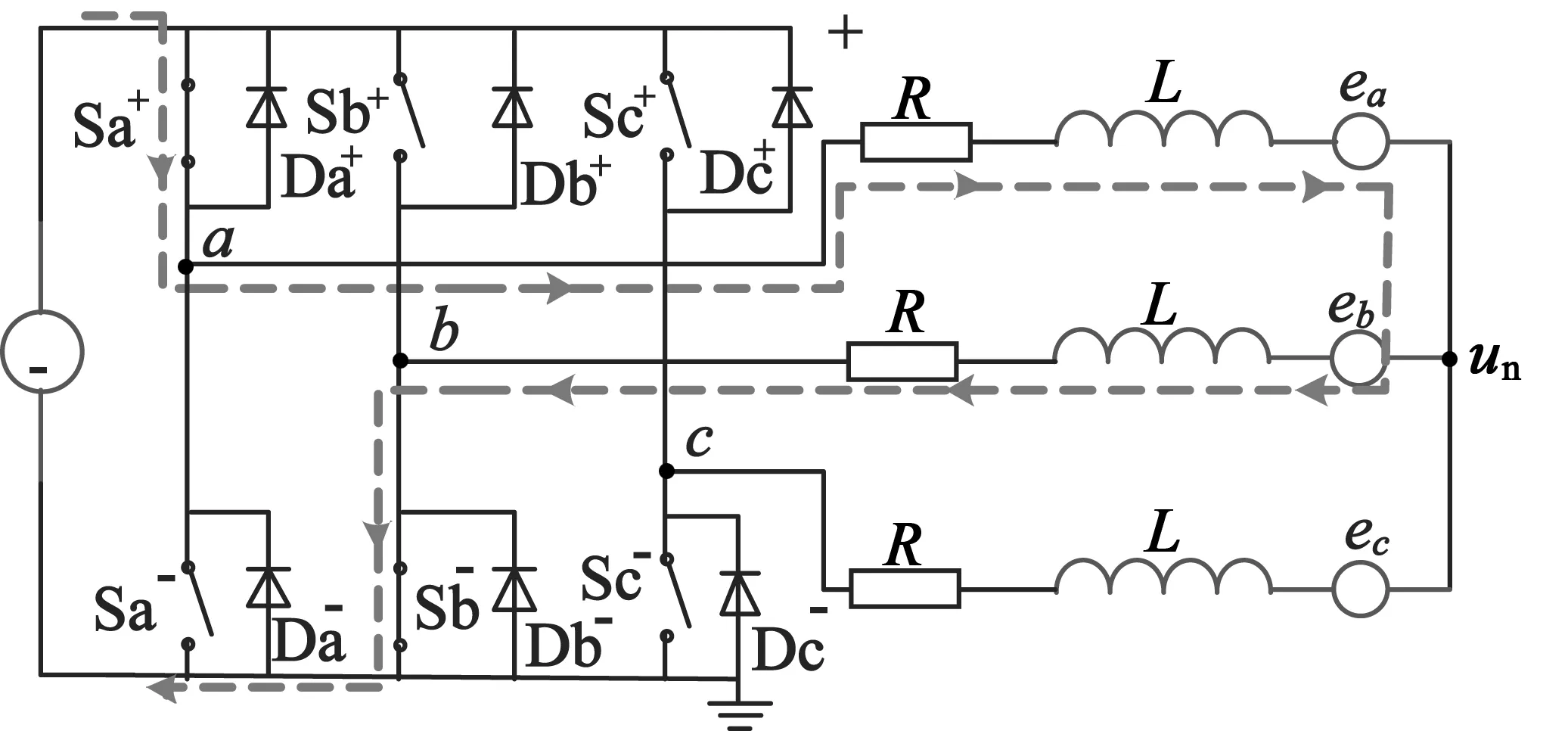
圖3 ab相導(dǎo)通、c相懸空時(shí)繞組電流情況
此時(shí)三相繞組相電壓關(guān)系有:
(5)
對上述ua,ub取和,可得:
(6)
在任意時(shí)刻,三相繞組相電流恒有:
(7)
此時(shí),ab相繞組反電動(dòng)勢位于梯形波反電動(dòng)勢平頂處且方向相反,相反電動(dòng)勢有:
(8)
代入式(6),可得中性點(diǎn)電壓:
(9)
將式(9)代入c相繞組相電壓方程,可得:
(10)
同理可求得a相、b相繞組相反電動(dòng)勢:
(11)
至此可知,在獲取線電壓波形后,可通過運(yùn)算獲得當(dāng)前時(shí)刻反電動(dòng)勢值,這使得不易觀測的反電動(dòng)勢變得易于觀測。
2 仿真研究
基于上述控制方法,在MATLAB/Simulink中建立無刷直流電動(dòng)機(jī)仿真模型。實(shí)驗(yàn)樣機(jī)參數(shù):額定直流側(cè)電壓ud=24V;額定轉(zhuǎn)矩TN=0.18N·m;額定轉(zhuǎn)速nN=2 000r/min;相電阻R=1.2Ω;電感L=1.2mH。
無刷直流電動(dòng)機(jī)的線電壓會(huì)耦合高頻PWM噪聲,這里加入低通濾波器濾波后對線電壓進(jìn)行采樣。濾波電路如圖4所示。
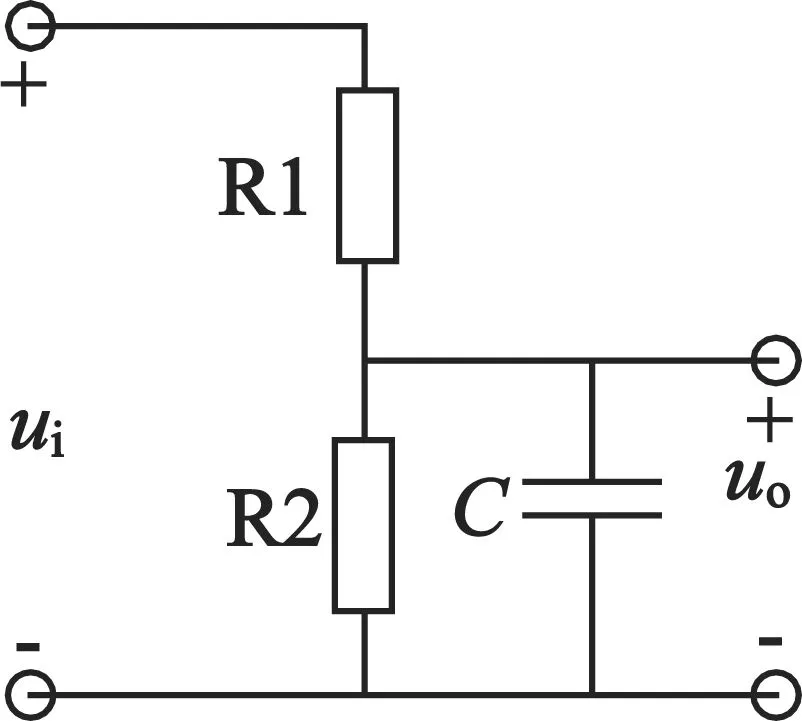
圖4 低通濾波電路
在計(jì)算反電動(dòng)勢時(shí),線電壓經(jīng)低通濾波器濾波后會(huì)帶來相移,該相移可由下式確定。
(12)
對濾波后的線電壓根據(jù)反電動(dòng)勢和線電壓關(guān)系式(11)求解反電動(dòng)勢值,得到的反電動(dòng)勢波形如圖5所示。對比圖5中的理想梯形波反電動(dòng)勢和計(jì)算反電動(dòng)勢可發(fā)現(xiàn),計(jì)算得到的反電動(dòng)勢波形平頂寬度小。實(shí)際反電動(dòng)勢由于氣隙磁場分布不均勻等原因,使得實(shí)際反電動(dòng)勢平頂寬度也小,接近正弦形式。計(jì)算反電動(dòng)勢的過零點(diǎn)時(shí)刻要滯后于實(shí)際反電動(dòng)勢過零點(diǎn)時(shí)刻,這是前文所述的濾波器相移引起,該滯后時(shí)間通過軟件補(bǔ)償。
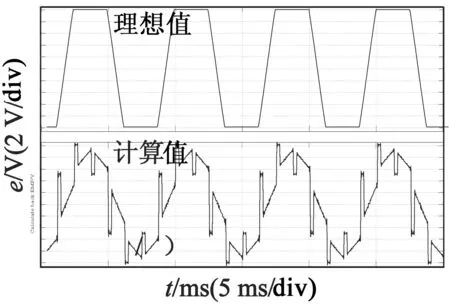
圖5 理想梯形波反電動(dòng)勢與計(jì)算反電動(dòng)勢波形
觀察圖5還可以發(fā)現(xiàn),計(jì)算反電動(dòng)勢每個(gè)周期內(nèi)均有6個(gè)窄脈沖,這是由于換相時(shí)刻續(xù)流二極管引起的線電壓突變所致,突變的時(shí)間就是續(xù)流二極管導(dǎo)通的時(shí)間,即是換相時(shí)間。該電壓突變會(huì)導(dǎo)致計(jì)算反電動(dòng)勢出現(xiàn)過零點(diǎn),但這并不是實(shí)際反電動(dòng)勢的過零點(diǎn)。若直接判斷過零點(diǎn),勢必會(huì)帶來誤判。
換相時(shí)刻(電壓突變時(shí)刻)下的反電動(dòng)勢變化率要明顯大于非換相時(shí)刻。為解決換相時(shí)刻過零點(diǎn)誤判,這里提出一種根據(jù)反電動(dòng)勢的變化率不同判斷反電勢是否真正過零點(diǎn)的檢測方法。
在控制系統(tǒng)中每50μs采樣一次線電壓并計(jì)算當(dāng)前反電動(dòng)勢。根據(jù)反電動(dòng)勢的計(jì)算值判斷是否出現(xiàn)過零點(diǎn),若否,繼續(xù)采樣線電壓;若是,取出前兩項(xiàng)反電動(dòng)勢取絕對值,計(jì)算反電動(dòng)勢變化率。在檢測到過零點(diǎn)時(shí),判斷反電動(dòng)勢變化率,若變化率大于設(shè)置的閾值,則認(rèn)為此時(shí)刻并不是真正的反電動(dòng)勢過零點(diǎn),而是反電動(dòng)勢突變;若此時(shí)的閾值小于設(shè)置閾值,則認(rèn)為此時(shí)刻為反電動(dòng)勢過零點(diǎn)。在判斷到反電動(dòng)勢過零點(diǎn)之后,控制系統(tǒng)在反電動(dòng)勢延遲30°電角度后,進(jìn)入換相狀態(tài)。控制系統(tǒng)內(nèi)部按照預(yù)先存儲(chǔ)的導(dǎo)通開關(guān)信號順序,對控制系統(tǒng)的功率器件發(fā)出控制命令。所設(shè)計(jì)的過零點(diǎn)檢測過程程序流程圖如圖6所示。
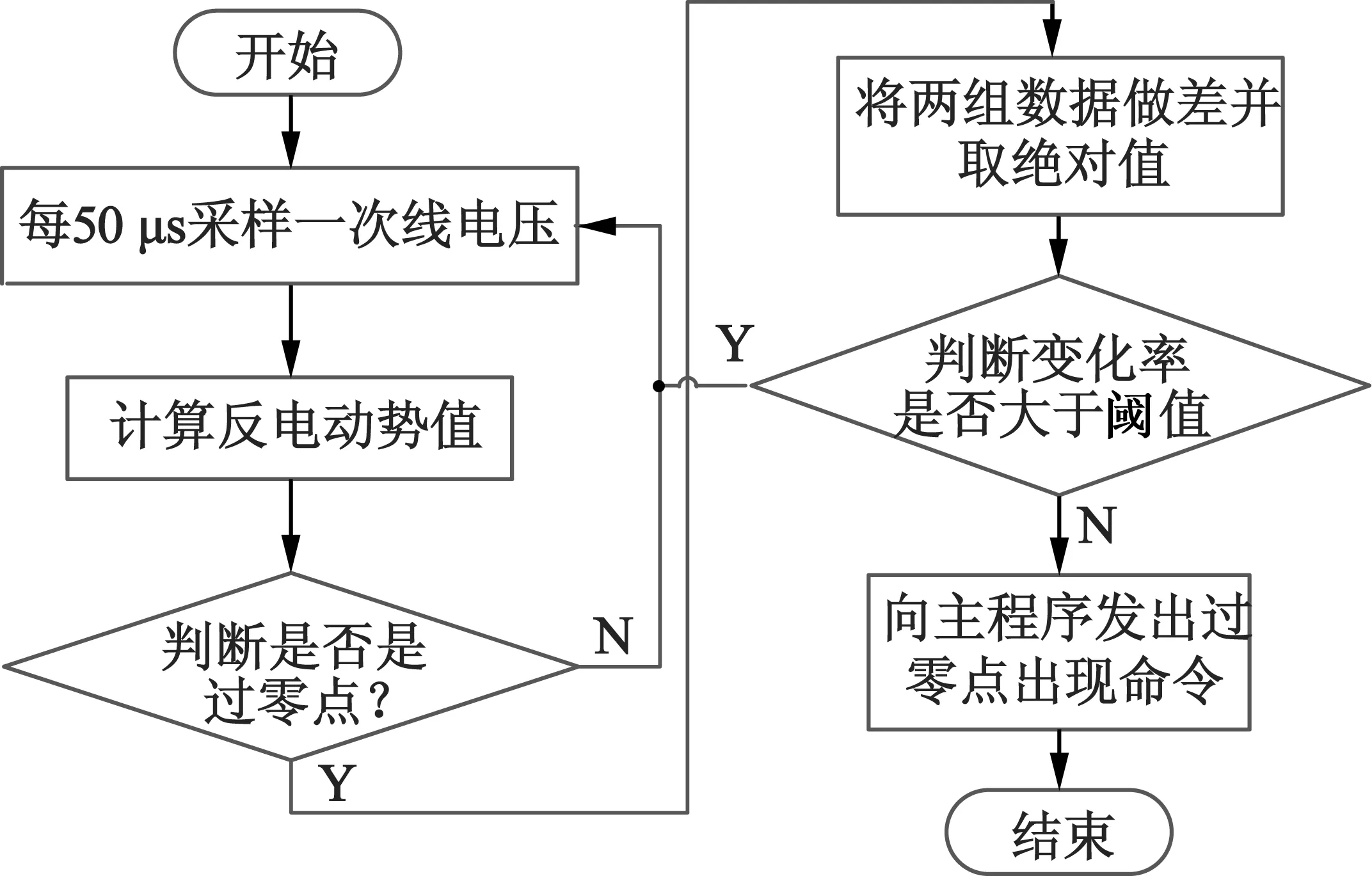
圖6 過零點(diǎn)檢測程序流程圖
按照上述設(shè)計(jì)思想,首先計(jì)算在功率器件導(dǎo)通瞬間引起電壓突變時(shí)的變化率k1,然后再計(jì)算過零點(diǎn)時(shí)刻線電壓變化率k2,取閾值斜率為(k1+ k2)/2。為驗(yàn)證在負(fù)載轉(zhuǎn)矩突變時(shí)該方法的可靠性,這里在1ms時(shí)突加0.1N·m的轉(zhuǎn)矩負(fù)載,電機(jī)的相電流和轉(zhuǎn)矩響應(yīng)如圖7所示。
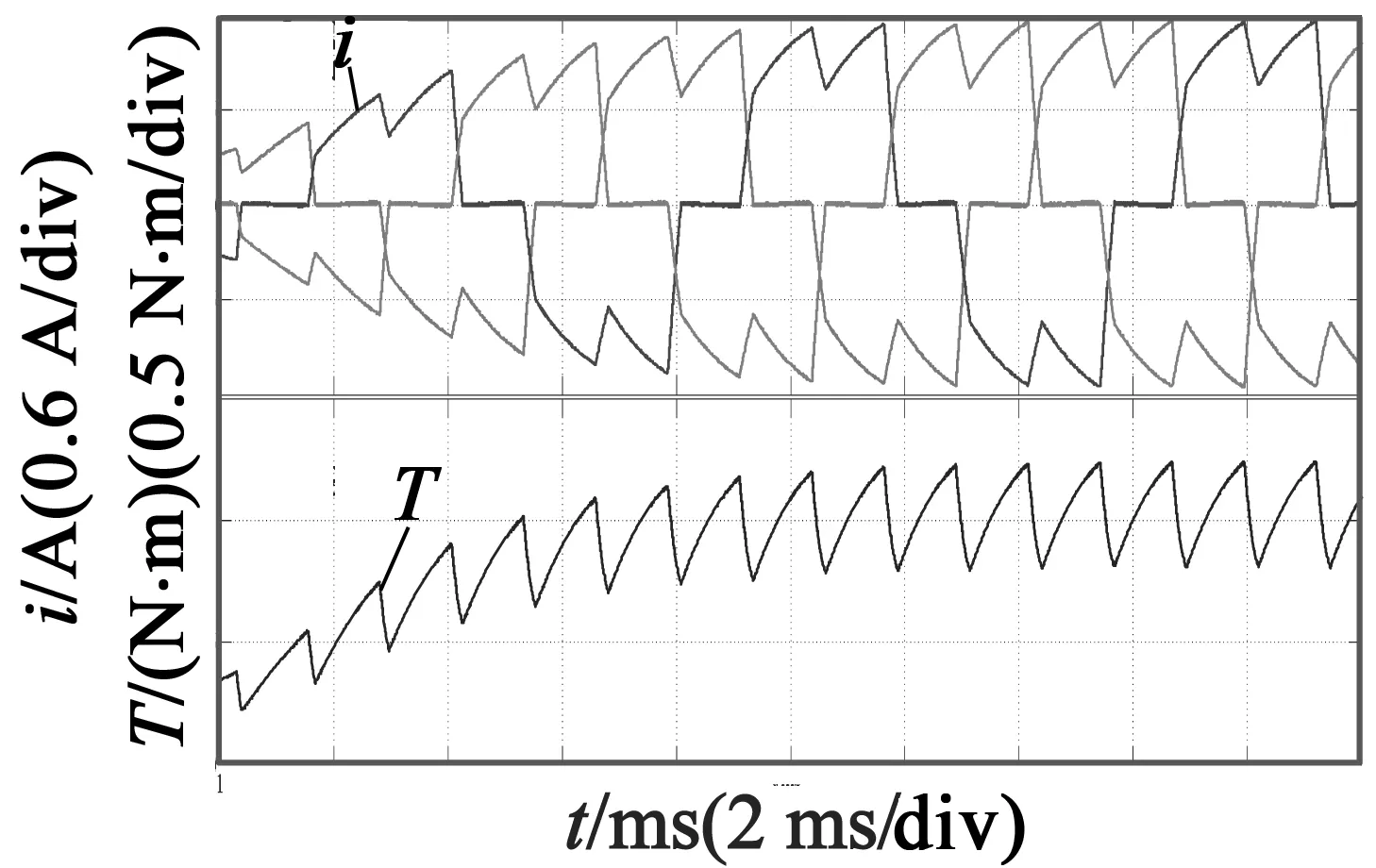
圖7 負(fù)載轉(zhuǎn)矩突變和恒定下的相電流和轉(zhuǎn)矩響應(yīng)曲線
圖7中,在負(fù)載轉(zhuǎn)矩突變和恒定時(shí),相電流沒有出現(xiàn)誤換相等異常情況,表明該方法在負(fù)載突變時(shí)仍能準(zhǔn)確提供位置信號。圖7中的相電流在平頂處有凹陷且轉(zhuǎn)矩波形類似鋸齒波,這是由于在換相時(shí)刻關(guān)斷相電流和導(dǎo)通相電流變化速率不一致,引起的非換相相電流脈動(dòng),導(dǎo)致?lián)Q相轉(zhuǎn)矩脈動(dòng)。
仿真結(jié)果表明,該方法在負(fù)載轉(zhuǎn)矩恒定和突變時(shí)刻沒有出現(xiàn)誤換相、不換相等異常情況,說明獲取的位置信號準(zhǔn)確。
3 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證上述分析過程,以32位定點(diǎn)DSPTMS320F2812作為主控芯片,以IR2136S作為功率器件驅(qū)動(dòng)芯片,以一臺4對極、星形連接的無刷直流電動(dòng)機(jī)作為被控對象,搭建實(shí)驗(yàn)平臺。其中DSP的事件管理器模塊和模數(shù)轉(zhuǎn)換模塊可很好滿足本實(shí)驗(yàn)的要求。本文所提的控制方法需要獲取線電壓,在驅(qū)動(dòng)電路中,線電壓經(jīng)過電壓霍爾傳感器采集、濾波送給DSPA/D轉(zhuǎn)換后存儲(chǔ)在DSP變量中以調(diào)用。
在該實(shí)驗(yàn)控制系統(tǒng)中,采用PWM-ON的調(diào)速控制方式。線電壓采樣頻率和功率器件開關(guān)頻率均為20kHz。在負(fù)載轉(zhuǎn)矩為0.1N·m情況下,圖8分別是在低速600r/min和額定轉(zhuǎn)速2 000r/min時(shí)無刷直流電動(dòng)機(jī)相電流波形。
在圖8中的相電流波形可以發(fā)現(xiàn),該方法在低速和額定轉(zhuǎn)速下均能平穩(wěn)運(yùn)行,無異常情況,實(shí)驗(yàn)表明該方法在低速和額定轉(zhuǎn)速均有良好的適應(yīng)性。
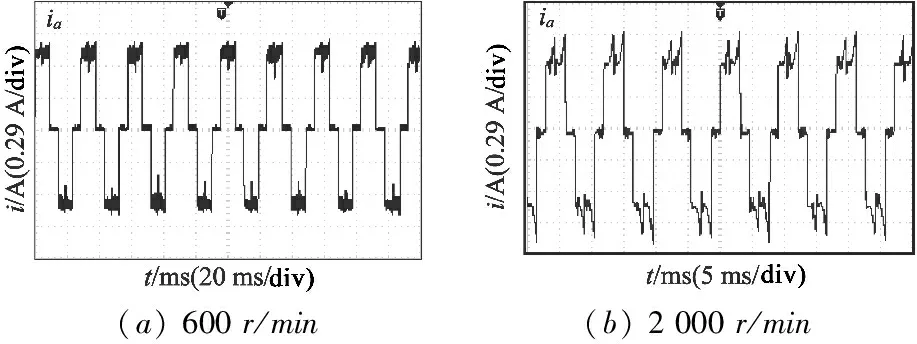
(a)600r/min(b)2000r/min
圖8 電機(jī)運(yùn)行時(shí)相電流波形


圖9 霍爾信號與S-b驅(qū)動(dòng)信號波形圖10 S+a驅(qū)動(dòng)信號與S-b驅(qū)動(dòng)信號波形
觀察圖9、圖10,該方法在補(bǔ)償?shù)屯V波器帶來的相移之后,可以準(zhǔn)確給出電機(jī)的位置信號,滯后時(shí)間為數(shù)微秒,滿足實(shí)際使用需求。該方法在額定轉(zhuǎn)速下基本無滯后現(xiàn)象,這是由于采用反電動(dòng)勢的過零點(diǎn)來確定換相時(shí)刻,避免了電機(jī)在額定轉(zhuǎn)速下由于反電動(dòng)勢達(dá)不到平頂寬度而導(dǎo)致?lián)Q相信號出現(xiàn)滯后的情況。
4 結(jié) 語
本文提出一種基于線電壓的無位置傳感器無刷直流電動(dòng)機(jī)轉(zhuǎn)子位置檢測方法。通過在線獲取線電壓間接觀測反電動(dòng)勢,實(shí)現(xiàn)當(dāng)前工況下反電動(dòng)勢過零點(diǎn)檢測,達(dá)到獲取轉(zhuǎn)子位置信號的目標(biāo)。經(jīng)實(shí)驗(yàn)驗(yàn)證,得以下結(jié)論:
1)該方法在全速段負(fù)載轉(zhuǎn)矩恒定和突變的時(shí)刻均能準(zhǔn)確提供位置信號,無誤換相、不換相、延遲換相等異常情況,表明該方法有較高的可靠性和實(shí)用性。
2)該方法僅需采集線電壓即可給出位置信號,且控制軟件通過求和運(yùn)算就可給出反電動(dòng)勢計(jì)算值。在硬件上僅增加線電壓檢測模塊,軟件上對CPU消耗小,易于實(shí)現(xiàn),具有較強(qiáng)的實(shí)用價(jià)值。
[1]CHUNT-W,TRANQ-V,LEEH-H,etal.SensorlesscontrolofBLDCmotordriveforanautomotivefuelpumpusingahysteresiscomparator[J].IEEETransactionsonPowerElectronics,2014,29(3):1139-1382 .
[2] 朱俊杰,粟梅,陳程,等.無刷直流電動(dòng)機(jī)反電勢過零檢測新方法[J].儀器儀表學(xué)報(bào),2013,34(2):441-447.
[3] 李志強(qiáng),夏長亮,陳煒,等.基于線反電動(dòng)勢的無刷直流電動(dòng)機(jī)無位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2010(7):38-44.
[4] 胡延奇,范永坤,熊皚,等.一種新的無刷直流電動(dòng)機(jī)反電動(dòng)勢檢測方法[J].微電機(jī),2015,48(2):49-53,61.
[5] 陳華鋒,宋輝,王占強(qiáng),等.一種改進(jìn)的無刷直流電動(dòng)機(jī)控制方法[J].電機(jī)與控制應(yīng)用,2015(1):28-35.
[6] LIN Y-S,LIN K.Novel back-EMF detection technique of brushless DC motor drives for wide range control without using current and position sensors[J].IEEE Transactions on Power Electronics,2008,23(2):934-940.
[7] LAI Y-S,LIN Y-K.A unified approach to zero-crossing point detection of back EMF for brushless DC motor drives without current and hall sensors[J].IEEE Transactions on Power Electronics,2011,26(6):1704-1713.
[8] 畢強(qiáng),江亮,羊彥,等.基于XC164CM的無傳感器無刷直流電動(dòng)機(jī)控制方法[J].微特電機(jī),2007,35(3):22-24,42.
[9] 鄧攀登,陳永軍,徐璐,等.低速電動(dòng)汽車用無刷直流電動(dòng)機(jī)控制系統(tǒng)[J].微電機(jī),2015,48(3):67-70,84.
[10] 董富紅,楊春生,王輝.無位置傳感器無刷直流電動(dòng)機(jī)磁鏈函數(shù)控制方法[J].微電機(jī),2006,39(6):26-27,41.
[11] 潘雷,孫鶴旭,王貝貝,等.基于單神經(jīng)元自適應(yīng)PID的無刷直流電動(dòng)機(jī)反電勢與磁鏈觀測及無位置傳感器直接轉(zhuǎn)矩控制[J].電機(jī)與控制學(xué)報(bào),2014,18(5):69-75.[12] FANG Jiancheng,LI Haitao,HAN Bangcheng.Torque ripple reduction in BLDC torque motor with nonideal back EMF[J].IEEE Transactions on Power Electronics,2012,27(11):4630-4637.
A Novel Scheme of Sensing Rotor Position of BLDCM Based on the Line Voltage
YIN Shuai,MA Tie-hua,Lü Cai-qin
(North University of China,Taiyuan 030051,China)
A novel rotor position detection method based on the line voltage was presented in the sensorless brushless DC motor control problems. Back-EMF was calculated based on the motor winding voltage equation. Thus, the commutation time was defined by sampling the motor line voltage. In order to solve the zero-crossing point problem which was caused by narrow pulse, the method of Back-EMF change rate detection method was proposed based on that the change rate of Back-EMF at commutation time is much larger than the non-commutation time principle. Simulation and experiments show that this method can accurately provide rotor position information and does not appears unusual circumstances such as false commutation at load torque identical and abrupt change situation. This indicates that this method has better adaptability and reliability.
brushless DC motor (BLDCM);position sensorless control;line voltage;back-EMF rate of change
2015-07-10
山西省基礎(chǔ)研究計(jì)劃項(xiàng)目(2013012010);山西省回國留學(xué)人員科研資助項(xiàng)目(2014-052)
TM33
A
1004-7018(2016)02-0037-04
殷帥(1988-),男,博士研究生,研究方向?yàn)殡姍C(jī)及其控制。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56