PMSM滑模觀測器無位置傳感器控制研究
2016-11-30 02:17:31張剛,陳波
微特電機 2016年2期
關鍵詞:系統
張 剛,陳 波
(1.江蘇建筑職業技術學院,徐州 221116;2.江蘇建筑節能與建造技術協同創新中心,徐州 221116;3.大連大學,大連 116622)
?
PMSM滑模觀測器無位置傳感器控制研究
張 剛1,2,陳 波3
(1.江蘇建筑職業技術學院,徐州 221116;2.江蘇建筑節能與建造技術協同創新中心,徐州 221116;3.大連大學,大連 116622)
永磁同步電機(PMSM)以其高效、大轉矩輸出而得到了廣泛應用。現有永磁同步電機驅動系統調速多采用位置傳感器獲取轉子位置以及速度信號,使得驅動調速控制系統成本增加,同時系統的可靠性也有所降低。針對此不足,研究了永磁同步電機的無位置傳感器控制,深入分析并設計了基于改進滑模觀測器的永磁同步電機矢量控制系統,通過引入鎖相環技術解決了系統抖動問題,基于MATLAB搭建了系統仿真模型。最后以TMS320F2812 DSP控制芯片為核心,搭建了實驗測試平臺,通過控制一臺1 kW表貼式永磁同步電機,實現了永磁同步電機的無位置傳感器滑模觀測器控制,驗證了所提出方法的正確性。
電機調速;滑模觀測器;永磁同步電機;無位置控制
0 引 言
近年,隨著高性能稀土永磁制造、加工工藝的發展,永磁同步電機(以下簡稱PMSM)性能得以較大提升,并且較傳統電勵磁電機相比,其結構簡單、高效、性能可靠,在工業、生活等多個領域得到大力發展。與此同時,隨著高性能電力電子器件以及新型控制控制方法的提出,電機驅動技術也得到快速發展[1-2]。現有PMSM驅動控制系統中,電機驅動多基于轉子位置和速度信號,而這些信號的獲取多基于機械式傳感器(如編碼器)等對電機運行數據的采集。由此存在兩個問題:第一,傳感器的存在會影響電機的控制精度,尤其當PMSM工作于惡劣環境下時傳感器自身精度會大大降低;第二,傳感器的使用增加了控制系統的成本,無形中也使得電機的尺寸有所增大[3]。無位置傳感器則能夠克服以上問題,因此基于無位置傳感器的PMSM控制技術一經提出就得到了廣大學者關注,其采用較為簡單的檢測電機電壓/電流信號,通過坐標變換、算法設計等一系列過程來估算出電機的轉子位置和速度信號,從而替代傳統機械式檢測部件,最終實現電機的有效控制[4]。與前者相比,無位置傳感器控制有著高效、低成本的顯著優點,對其研究已成為交流調速驅動領域的一個重要研究方向,在電力拖動、電機調速等應用場合有著較好的應用前景[5]。
PMSM無位置傳感器控制系統性能優劣取決于控制方案的合理性以及位置估算環節的精確性,而電機位置估算環節策略主要以全階觀測器、擴展卡爾曼濾波器、降階觀測器和滑模觀測器等為代表,這些觀測器實質上為系統的狀態重構[6-7]。其中,滑模觀測器控制是一種非線性控制方法,其本質是一種有間斷的開關控制,與其所控制的對象參數變化及擾動無關,因此特別適用于PMSM這樣一個多場耦合、多變量的非線性系統[8]。PMSM滑模觀測器無位置控制多采用不同的切換狀態以此抵消系統的不確定性,現有研究對于PMSM控制系統系統的抖震問題尚沒有較好解決[9]。
本文從分析PMSM無位置傳感器控制工作原理入手,深入分析并設計了基于改進滑模觀測器的永磁同步電機矢量控制系統。通過引入鎖相環技術解決了系統抖動問題,基于MATLAB搭建了相應的仿真系統模型,最后以DSP控制器為核心,搭建了實驗平臺,通過控制一臺1 kW表貼式PMSM進行了實驗驗證。
1 PMSM無位置傳感器觀測原理
1.1 PMSM數學模型
PMSM的數學模型一般由電壓、磁鏈以及轉矩三個方程組成。在建立電機數學模型之前,作如下假設:
1) 忽略鐵心中的渦流以及磁滯損耗;
2) 定子通三相對稱正弦交流電;
3) 轉子上無阻尼繞組;
4) 轉子永磁電導率為零。
基于以上假設,采用坐標變換后,可以得到PMSM在d,q坐標系下的基本方程:
電壓方程:
(1)
式中:ud,uq為d,q軸電壓;ψd,ψq為d,q軸磁鏈。
磁鏈方程:
(2)
電磁轉矩方程:
(3)
從式(3)可以看出,轉矩方程由兩部分組成。第一部分為電機的磁阻轉矩,此部分主要由轉子凸極效應引起;第二部分為電機的電磁轉矩,主要由永磁體勵磁磁場與定子電流相互作用產生的。本文采用傳統的轉子表貼式PMSM,其交軸、直軸電感相等,即Ld=Lq,故不存在磁阻轉矩。轉矩方程可簡寫為如下形式:
(4)
由電磁轉矩方程可以看出,PMSM的矢量控制最終歸結為對d軸和q軸電流的控制,其關鍵是如何實現高性能的瞬時轉矩控制。此外,當采用id=0的矢量控制時iq和ψf兩者正交,每單位定子電流產生的轉矩值最大,從而可以獲得快速的轉矩響應。
1.2PMSM矢量控制系統
現有PMSM控制方法中,矢量控制是一種較為常用的方法,其通過控制電樞繞組電流來實現電機轉矩性能改善目的。然而,實際上定子側電流在空間上以同步速旋轉,控制改變該交流量異常困難。為此,需通過坐標變換把多個靜止坐標系下物理量變換到旋轉同步坐標系來。由此可見,矢量控制基本思想將直流電機的控制方法引入到交流電機控制時,將合成的三相定子電流進行矢量分解,形成兩個正交且互不影響的磁通的勵磁電流分量和轉矩電流分量,即id和iq。對此分量進行調節,使得id和iq跟蹤指令值,實現電動機轉速和轉矩的控制。
當采用id=0控制時,通過對d-q軸電流的解耦,使定子電流中只有交軸分量產生電磁轉矩。由于沒有直軸電流,故電機中不會出現直軸電樞反應和去磁效應,磁阻轉矩為零。該控制方法簡單易行,本文也采用id=0控制方法,重點研究其加入滑模觀測器后的設計。對于該控制方法來說,實現PWM信號的調制主要有正弦脈寬調制(SPWM)和空間電壓矢量控制(SVPWM)兩種方法。SPWM控制方法特點在于保持逆變器輸出接近正弦波電壓,而對于電流波形則沒有過多考慮。然而當PMSM定子繞組施加交流電流時產生的旋轉磁場,從而帶動轉子同步旋轉。SVPWM方法則是圍繞把逆變器和電機視為一體機構,重點解決如何產生圓形磁場,并通過跟蹤該圓形磁場以控制電壓,即采用“磁鏈跟蹤控制”,此方法的直流側電壓利用率控制效果更加理想。
2 滑模觀測器設計
2.1SMO控制理論基礎分析
SMO變結構控制作為一種特殊的非線性控制方法,以其多參數變化、較強的魯棒性而在解決不確定的非線性系統控制問題上有著較好表現[10]。其通過開關的切換,選擇狀態空間中的切換面s(x)=0,兩側采取不同結構,從而實現系統的滑動模態。當進入滑動的模態之后,系統對結構內部參數變化以及外部因素變化不敏感,非常適用于PMSM這樣一個多場耦合系統。
設計滑模變結構控制系統基本可以分為兩步,其一是滑模面以外的運動,即相平面空間中任意位置運動點正在朝滑模面運動,此時有s(x)≠0;其二是滑模面內的運動,運動點到達滑模面以后進行滑模運動,此時s(x)=0。滑模控制器的設計即針對系統的這兩個運動部分,根據切換函數和控制函數,滑模控制系統便可真正建立起來。其具體設計步驟如下:
1) 確定切換函數s(x)
切換函數s(x)即切換開關面,開關面代表了系統的理想動態特性,使它所確定的滑動模態趨于漸近穩定。在輸入唯一的情況下,切換函數設計:
(5)
式中:xi=x(i-1)(i=1,2,...,n)為系統的狀態及各階的導數。
2) 控制函數u(x)
設計u(x)使趨近運動滿足到達初始條件,并且在合理較短時間內保持較小抖陣到達開關面。目前對于控制函數的設計有常值切換、比例切換以及函數切換控制等幾種方法[11],其中函數切換控制方法以其響應較快、控制效果好而得到較多研究,本文即采用此種控制方法。
2.2 基于鎖相環的改進SMO估計方法
由于在滑模觀測器中估計轉子位置時用到了反正切函數,在數字化實現時需要反復查詢反正切數值表,從而產生計算噪聲。同時,由于在滑動模態下滑模控制存在高頻抖動,反正切函數在將抖動引入到除法運算中導致高頻抖動產生誤差被放大,最終造成角度估算有較大誤差。傳統SMO設計在PMSM控制開關關斷導通時存在較為嚴重的抖動問題,本文在常規滑模觀測器的基礎上作了改進,添加了PLL控制,提出一種利用PLL技術的改進滑模觀測器觀測方法,如圖1所示,可以提高估計轉子位置和速度的精度。具體來說,PLL技術是基于高精度的相位跟蹤原理實現的,它通過調節角度誤差Δθ來調節估計轉速,最終使估計轉速與實際轉速一致。這種方法由于采用了PLL調節器,提高了系統估計精度,并能獲得良好的動態性能。
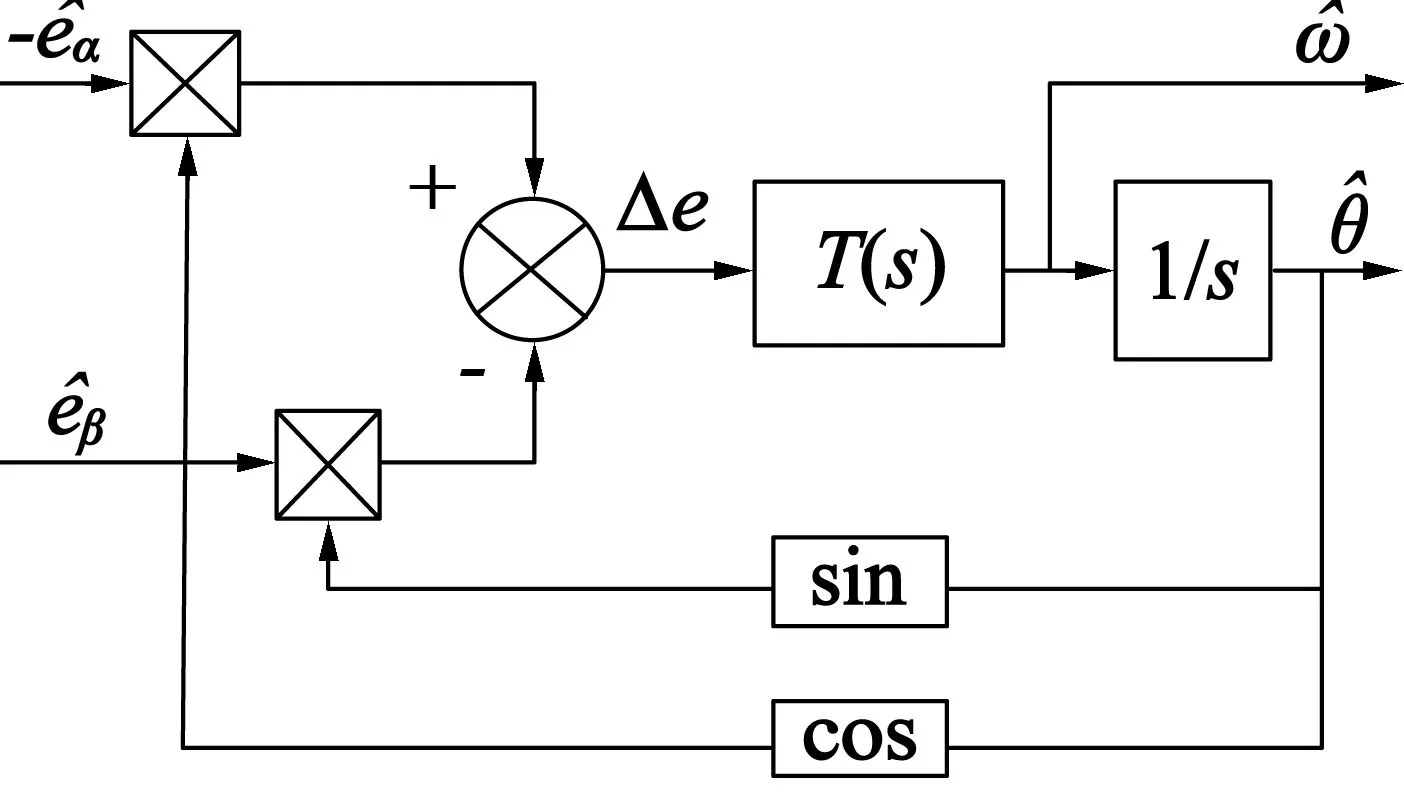
圖1 基于鎖相環控制的改進滑模觀測器設計
此時鎖相環系統的等效傳函框圖如圖2所示。
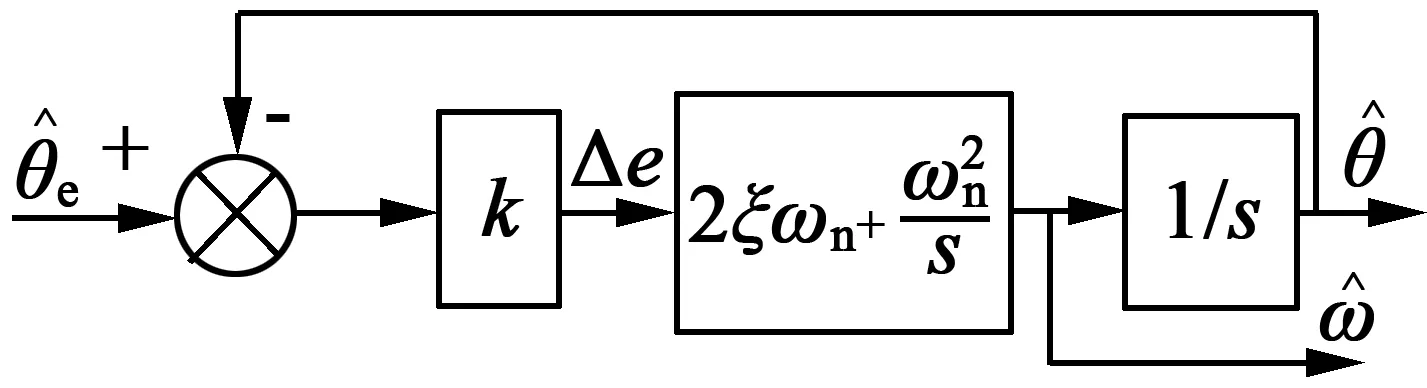
圖2 包含鎖相環系統的傳函等效框圖
可以得到其閉環傳遞函數和估算位置的誤差傳遞函數分別:
(7)
當電機穩態運行時,鎖相環系統輸入函數為斜坡函數,電機轉速基本維持為恒值。根據自動控制相關原理,當輸入為斜坡函數時,該鎖相環傳遞系統的穩態誤差可表示:
(8)
從式(8)可以看出,當系統處于穩定狀態時,鎖相環系統可以精確提取轉子位置和速度信號。
2.3 系統離散化實現
將上述連續系統離散化,離散化后滑模電流觀測器和估計反電勢表達式如下:
電流觀測器方程:
(9)
其數字化實現方程:
(10)
電流觀測器的輸出經過控制器可以得到估計的反電勢,此時含有較大的諧波分量,需要經過低通濾波器的濾波,用如下方程表示:
(11)
將其離散化,其數字化實現方程:
(12)
式中:fr為濾波器的截止頻率。
3 基于改進SMO的PMSM無傳感器控制模型
在常規SMO的基礎上,利用鎖相環技術對位置和轉速的估計進行改進,系統總體仿真框圖如圖3所示。
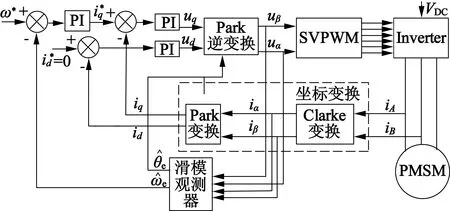
圖3 基于滑模觀測器的PMSM的id=0控制系統
圖3的仿真系統中PMSM主要參數基于實驗電機銘牌參數,具體如表1所示。

表1 PSMSM電機基本參數
圖4為采用鎖相環技術估計的轉子位置和實際位置仿真波形圖。
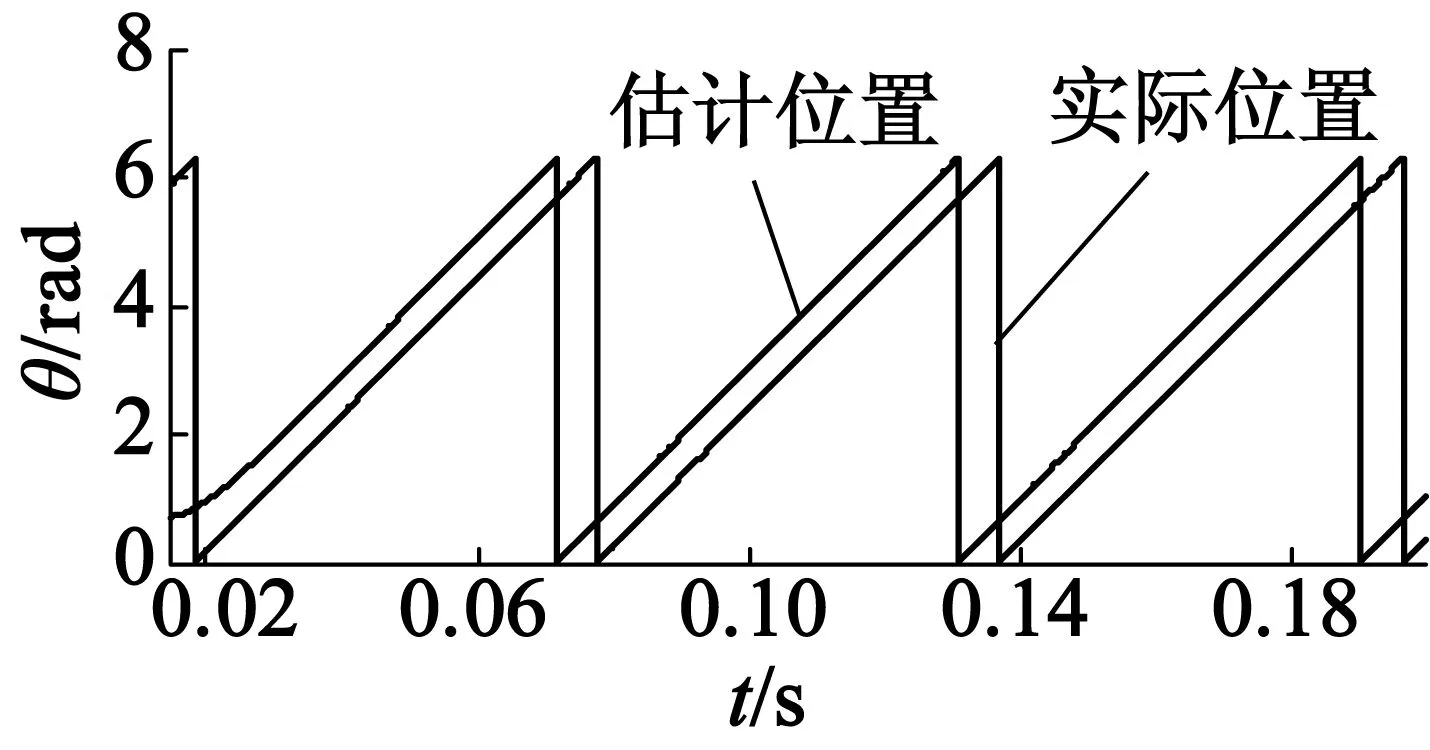
圖4 改進SMO位置仿真波形
由圖4可以看出,估計位置能夠很好地跟蹤實際位置,兩者之間誤差很小,且追蹤較為平穩。
圖5為估計位置和實際位置誤差波形圖,給出了誤差局部放大圖。
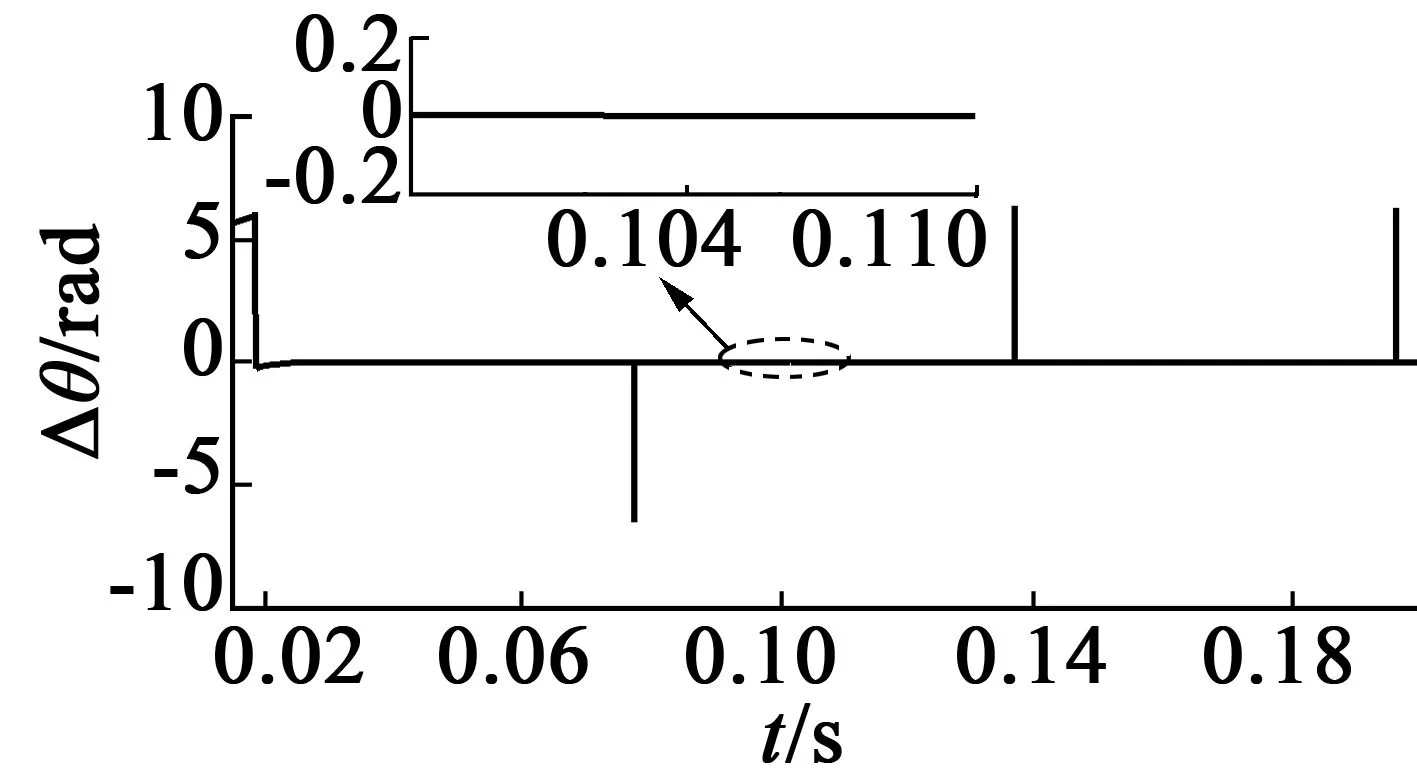
圖5 改進SMO位置估計誤差波形圖
由圖5可以,看出采用鎖相環技術改進的SMO估計的轉子位置精度較高、誤差更小,更適合于高性能的電機控制。
圖6為采用鎖相環技術估計的轉速和實際轉速波形圖。
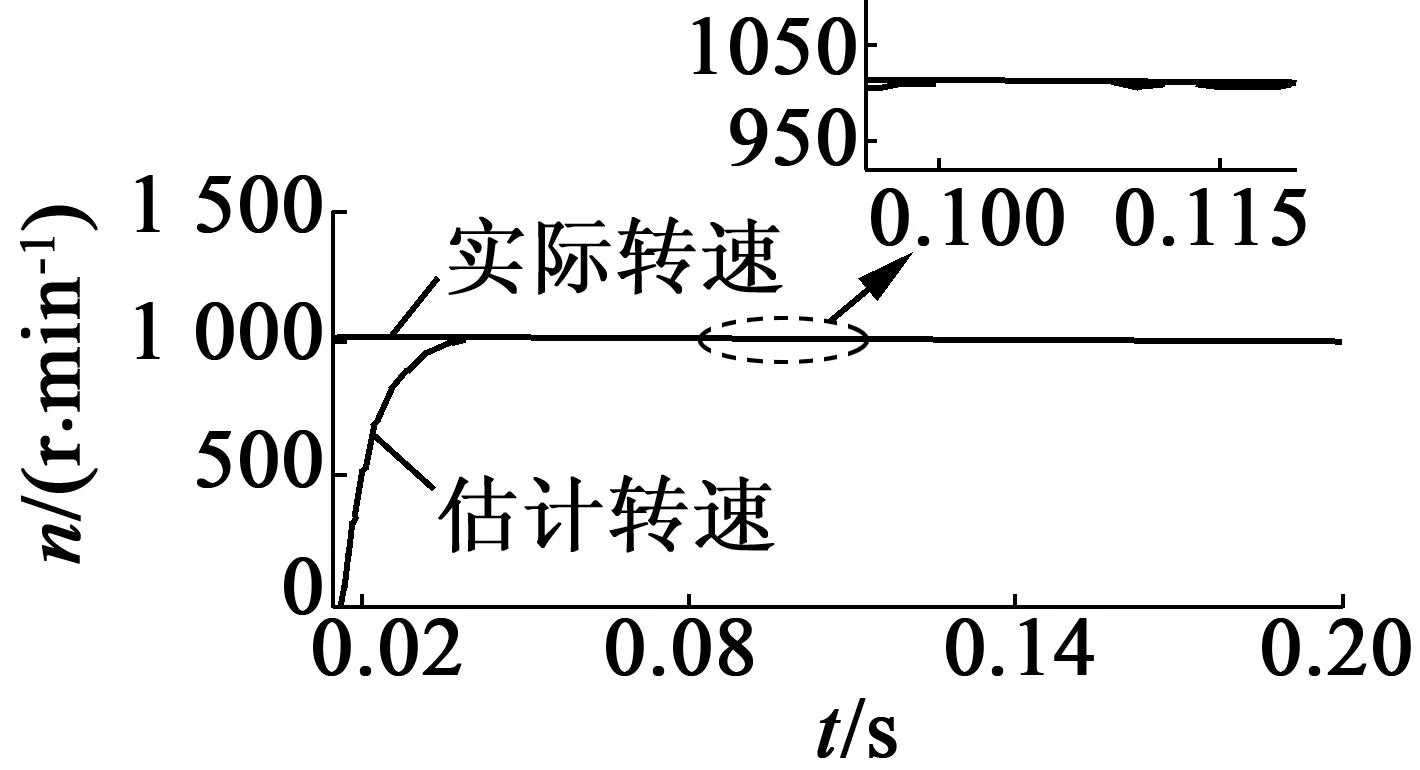
圖6 改進SMO轉速波形圖
由圖6可以看出,當電機穩態運行時,采用PLL技術后估計的速度誤差小,轉速曲線更加平滑,從而使得系統具有更高的估計精度。
4 實驗論證
本系統實驗平臺主要包括三部分:1kW交流三相表貼式PMSM,MATLAB系統仿真時所采用參數與其一致;以TMS320F2812DSP控制器為核心的控制電路板;驅動電路板。整個系統軟、硬件及電機實驗測試平臺如圖7所示。
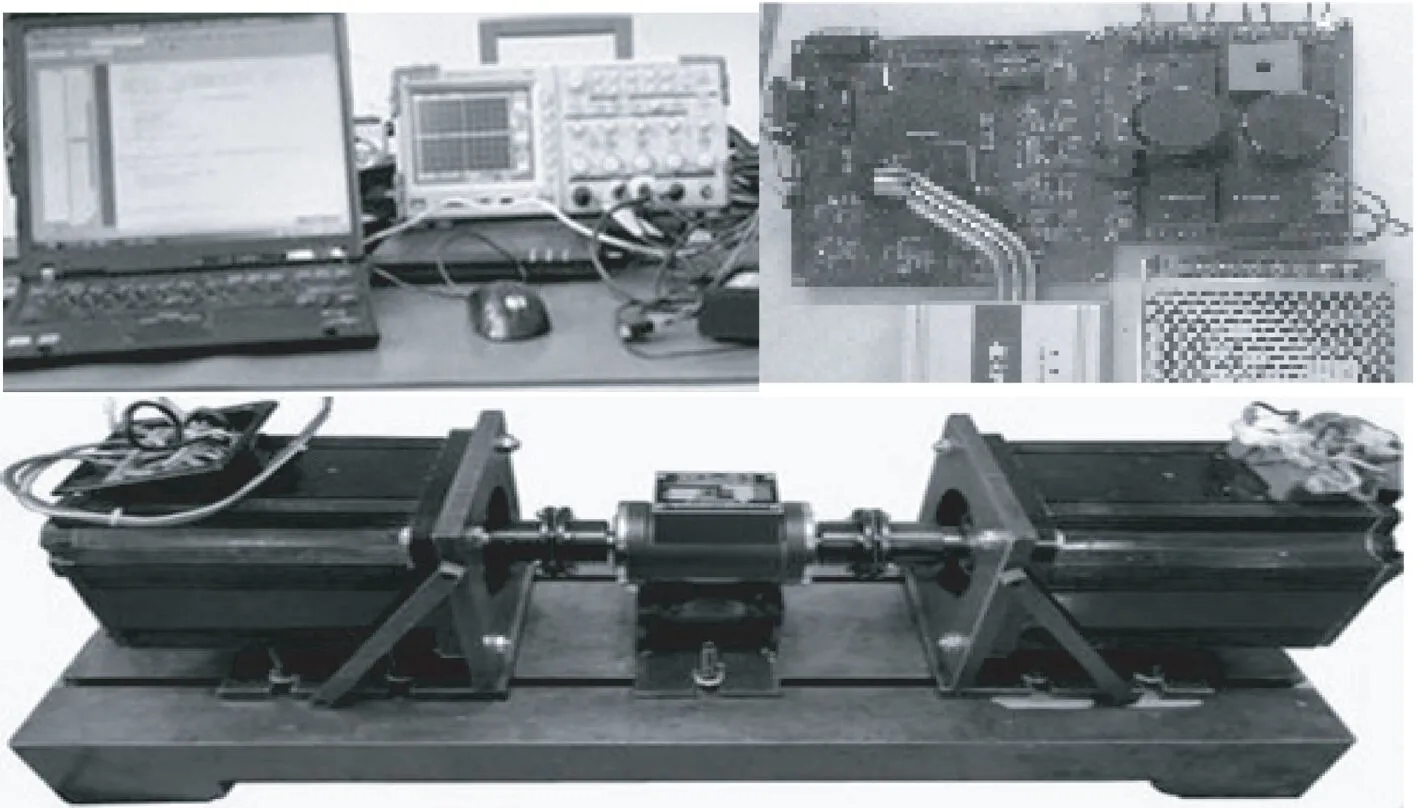
圖7 PMSM無位置傳感器控制測試平臺
為了檢驗所提出無位置傳感器控制方法的可行性及效果,基于所構建的實驗平臺,分別進行了開環起動實驗和基于滑模觀測器的PMSM矢量控制試驗。其中相電流波形等模擬信號通過示波器直接提取,滑模觀測器估計的反電勢、電流、轉子位置和速度相關信號波形可通過CCS軟件獲取。圖8為滑模觀測器估計的電機反電勢波形圖。

圖8 SMO估計α軸反電勢波形
由圖8可以看出,經過濾波器濾波以后,波形曲線平滑,正弦畸變和高頻噪聲都比較小,因此非常有利于轉子位置和速度信號的正確估計。
圖9為轉子位置波形,其中實際位置信號是利用復合式光電編碼器得到。
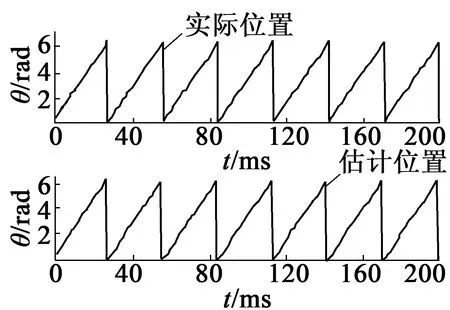
圖9 實際轉子位置與SMO估計位置波形
由圖9可以看出,實際位置與估計位置波形相似度非常高,兩者在時間和幅值上差別非常小。
圖10給出了估計位置和實際位置的誤差信號波形圖。
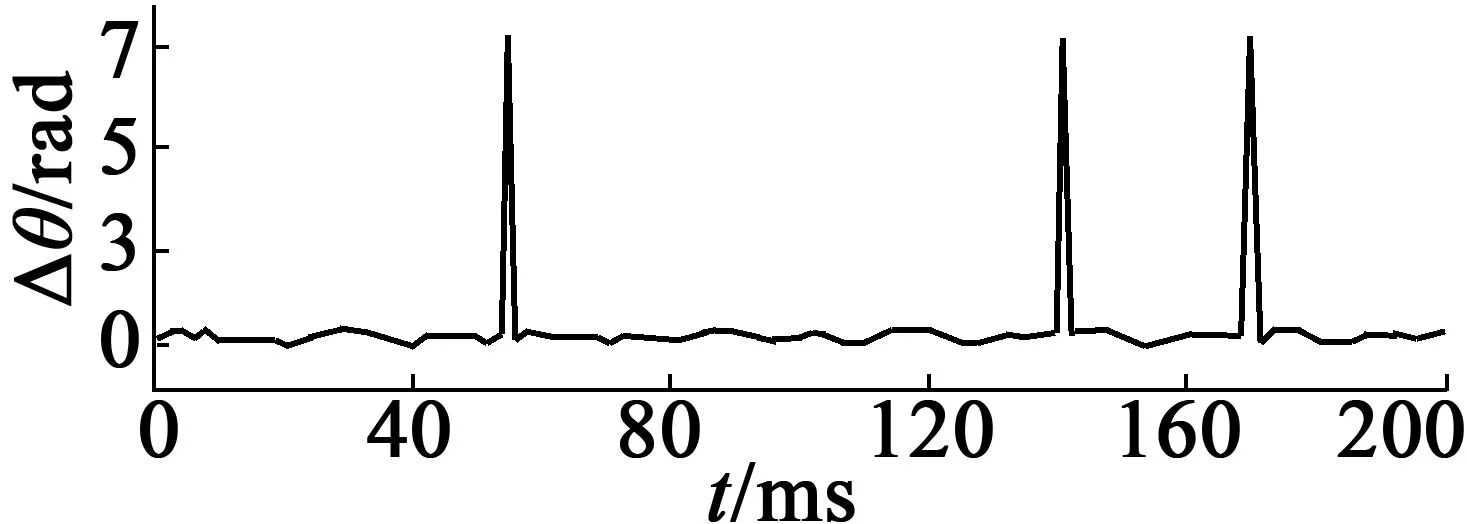
圖10 SMO估計位置誤差波形
由圖10可以看出,當電機在中高速區域穩定運行時,其估計位置誤差較小,滑模觀測器估計的轉子位置和實際位置基本一致。
圖11為電機轉速波形圖,電機實際轉速是通過編碼器獲取的位置信號計算得到。
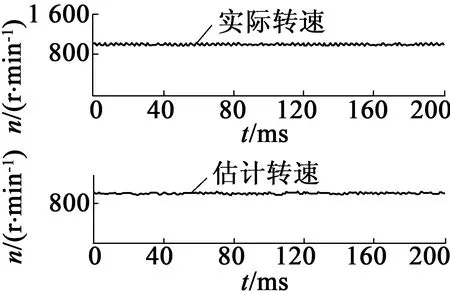
圖11 實際轉速與SMO估計轉速波形
由圖11可以看出,電機穩態運行時估計的轉速能很好地跟蹤實際轉速,兩者波形近似重合,且估計轉速波形平穩,證明系統抖動較小,驗證了所提出方法的正確性。
5 結 語
在對PMSM無位置傳感器控制原理及滑模控制器深入分析基礎上,提出了基于鎖相環技術的改進滑模觀測器PMSM無位置傳感器控制方法,搭建了系統仿真模型并進行了仿真。最后基于一臺1kW三相正弦波驅動表貼式PMSM為控制對象,以數字信號處理器TMS320F2812為核心,設計開發了無位置傳感器PMSM控制系統的硬件電路,編寫了基于PLL的改進SMO的PMSM控制系統程序,完成了對上述設計、分析與仿真,并進行了實驗驗證,通過滑模觀測器估計位置與實測位置、轉速波形與實測轉速波形等比較,驗證了上述分析和設計的正確性,表明了所提出方法的正確性和有效性,對進一步研究PMSM無位置傳感器控制及其應用方面有一定參考性。
[1] 唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997.
[2] 李永東.交流電機數字控制系統[M].北京:機械工業出版社,2002.
[3] 李林杰,焦振宏,時建欣.有位置和無位置傳感器對轉電動機調速控制系統[J].微特電機,2010,38(12):38-40.
[4] 姜衛東,趙勇,邢棟,等.外轉子無刷直流電動機無位置傳感控制技術研究[J].微特電機,2012,40(5):45-47.
[5] 劉仕釗,李聲晉,盧剛,等.基于SMO的無位置傳感器PMSM空間矢量控制研究[J].微特電機,2010,10:39-40.
[6] 薛樹功,魏利勝,凌有鑄.基于擴展卡爾曼濾波的永磁同步電機無傳感器矢量控制[J].電機與控制應用,2011,38(8):15-18.
[7] 賈洪平,孫丹,賀益康.基于滑模變結構的永磁同步電機直接轉矩控制[J].中國電機工程學報,2006,26(20):134-138.
[8] 年珩,賀益康,黃雷.永磁同步電機無位置傳感器運行場路耦合分析[J].中國電機工程學報,2008,28(18):24-27.
[9]LAICK,KUOKS.Anovelmotordrivedesignforincrementalmotionsystemviasliding-modecontrolmethod[J].IEEETrans.onIndustrialElectronics,2005,52(2):499-507.
[10] 尚喆,趙榮祥,竇汝振.基于自適應滑模觀測器的永磁同步電機無位置傳感器控制研究[J].中國電機工程學報,2007,27(3):23-27.
[11] 王冉珺,劉恩海.永磁同步電機轉子初始位置的檢測方法[J].電機與控制學報,2012,16(1):63-65.
Research on PMSM Position Sensorless Control Based on Sliding Mode Observer
ZHANG Gang1,2, CHEN Bo3
(1.Jiangsu Jianzhu Institute,Xuzhou 221116,China;2.Jiangsu Collaborative Innovation Center for Building Enery Saving and Construction Technology,Xuzhou 221116,China; 3.Dalian University,Dalian 116622,China)
Permanent magnet synchronous machine (PMSM) has been broadly acknowledged in kinds of industrial applications due to its high efficiency and large output torque. The signals of rotor position and velocity of existing PMSM drive system are obtained through the utilization of position sensors, which increases the costs of the drive system while reducing the system reliability. To overcome this disadvantage, PMSM sensorless control was studied in this paper, and one improved PMSM vector control method was proposed based on sliding mode observer. Phase-locked loop (PLL) was introduced to avoid the systemic jitter problem, and then the whole simulation system was established based on MATLAB. Finally, an experimental platform based on TMS320F2812 DSP control chip was built to test the correctness of the proposed method through the control of one 1 kW surface PMSM. The test results reveal that the proposed improved SMO method based on PLL can achieve the observations of position and speed simultaneously, which verifies the correctness and the of accuracy of proposed method.
machine speed adjustable; sliding mode obverse (SMO); permanent magnet synchronous machine (PMSM); position sensorless control
宋洋(1982-),男,工程師, 研究方向為電力系統運維及電機控制等。
2015-12-15
江蘇建筑節能與建造技術協同創新中心開放基金項目(SJXTQ1503);江蘇省建設系統科技項目(201507060003)
TM341;TM351
A
1004-7018(2016)02-0054-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32