三相四橋臂逆變器的三角波輔助控制策略
2016-12-01 09:01:16馬海嘯葉海云龔春英
電機與控制學報 2016年1期
關鍵詞:控制策略
馬海嘯, 葉海云, 龔春英
(1.南京郵電大學 自動化學院,江蘇 南京 210023;2.南京航空航天大學 自動化學院,江蘇 南京 210016)
?
三相四橋臂逆變器的三角波輔助控制策略
馬海嘯1, 葉海云1, 龔春英2
(1.南京郵電大學 自動化學院,江蘇 南京 210023;2.南京航空航天大學 自動化學院,江蘇 南京 210016)
針對三相四橋臂逆變器常用的控制方法或者屬于開環控制,或者需要大量繁瑣的計算,不適用于對動靜態性能要求較高的中高頻逆變場合這一缺點,提出一種三相四橋臂逆變器的三角波輔助控制策略。該控制策略依據電壓電流雙閉環控制原理,通過對三相四橋臂逆變電路建立電壓電流方程,推導三相輸出電壓對稱所需要的條件,從而發現三角波在各相橋臂的控制中起到至關重要的作用。前三相橋臂在電壓電流雙閉環控制的基礎上在調制信號中注入三角波,使得調制比可以大于1,提高了逆變器的直流電壓利用率;第四橋臂則利用構造出的三角波作為調制信號進行PWM控制,確保逆變器在不平衡負載條件下輸出電壓對稱。設計一臺6 kVA 原理樣機,仿真和實驗結果證明了該控制策略的可行性。
三相四橋臂逆變器; 三角波; 雙閉環控制; 對稱分量法; 零序諧波
0 引 言
隨著電力電子的快速發展,各種不平衡負載的應用越來越普遍,常要求三相逆變器具有帶不平衡和非線性負載的能力[1]。
三相四橋臂逆變器[2]在三相橋式逆變器的基礎上增加了一個橋臂形成中性點,使三相四橋臂可以產生三個獨立的電壓,從而使其有在不平衡負載下維持三相電壓對稱的能力,從而受到了各國學者的廣泛青睞。
目前常見的三相四橋臂逆變器的控制策略主要有以下幾種:空間矢量控制法[3-6],該方法通過用一穩態參考矢量的勻速定幅旋轉,來保障三相電壓的輸出要求,并根據負載和輸入電壓的變化相應地改變參考矢量幅值的大小,從而達到調壓的目的,但在負載變化或負載情況不明時,很難實現實時控制。通過實時檢測三相負載電流和直流母線電壓可計算確定三相基準電壓給定,使之適用于任意時變線性負載的場合,但該方法增大了數據的計算量,逆變器動態性能不高。在空間矢量控制的基礎上也有學者提出將正序、負序和零序分量分別來控制從而獲得四個橋臂控制的解耦[13-16],但這種方法同樣無法避開坐標變換的數學計算,在中頻逆變器中由于開關頻率相對較高,較大的計算量不利用逆變器動靜態性能的提高。開關點預置控制[7-8]通過對前三橋臂的開關角預置,消除不含零序諧波的低次奇次諧波,對第四橋臂的開關角預置消除低次零序諧波。控制原理簡單易于實現,但屬于開環控制方式,逆變器動態性能也不會太高。滯環電流控制[9-10]要求反饋電流在給定的環寬范圍內變化,從而實現反饋電流跟蹤給定電流的目的。但用在四橋臂逆變器的控制時,需要對各相誤差電流大小進行判斷來決定第四橋臂開關管的開關狀態,由于檢測判斷存在誤差,因此控制精度也較難讓人滿意。文獻[11-12]提出一種解耦控制方案,把三相濾波電感和零線濾波電感看作電源內阻抗,通過引入變量及變換控制的方式,經等效變換將零線阻抗變換為零,從而將復雜的三相電壓控制轉化為單相電壓進行控制,便于SPWM控制,但該控制方法的控制參數的選擇與逆變器電感參數相關,控制器設計較為繁瑣,且不利于電感參數的優化。
為了簡化逆變器控制中的運算和判斷,提高中頻三相四橋臂逆變器的電氣性能,本文提出了一種包含三角波輔助控制的雙閉環控制策略。
1 四橋臂逆變器輸出電壓對稱的條件
三相四橋臂逆變器的主電路拓撲結構如圖1所示。

圖1 三相四橋臂逆變器主電路拓撲
開關管Q1~Q6構成逆變器的A、B、C三相橋臂,Q7~Q8構成逆變器四橋臂。LA、LB、LC分別為A、B、C三相濾波電感,LN為第四橋臂濾波電感,CA、CB、CC分別為A、B、C三相濾波電容,RA、RB、RC分別為逆變器A、B、C三相負載。
為方便分析,假設直流電源電壓E由電容C1、C2一分為二,兩電容中點為參考電位,三相橋臂中點和第四橋臂中點相對于參考電位的電壓分別為vA、vB、vC和vN,三相電感電流和第四橋臂電感電流分別為iLA、iLB、iLC和iLN,三相輸出電壓為uoA、uoB、uoC,三相濾波電感值對稱LA=LB=LC=L,三相濾波電容值對稱CA=CB=CC=C。根據基爾霍夫電壓和電流定律可得
(1)
iLN=iLA+iLB+iLC。
(2)
將式(1)中的三個等式左右兩邊分別相加,并且再將式(2)代入可得
(3)
性能優良的三相逆變器在帶三相不平衡負載時其三相輸出電壓也能維持較好的對稱性。那么不妨假設逆變器的三相輸出電壓完全對稱,在任意的不平衡負載條件下滿足式(4):
uoA+uoB+uoC=0。
(4)
另外為了方便三相四橋臂逆變器控制策略的實現,通常各相橋臂的控制采用對稱控制,因此各相橋臂中點的電勢vA、vB和vC也是對稱的。那么,如果忽略vA、vB和vC中的高頻開關分量也可以得到
vA+vB+vC=0。
(5)
將式(4)和式(5)代入式(3)整理可得
(6)
從式(6)可以看出,對vN控制的核心思想是保證第四橋臂流過電流的數值等于iLA+iLB+iLC。于是可以得出結論:若三相四橋臂逆變器各相的給定基準電壓為對稱正弦波,那么對第四橋臂的控制只要能使第四橋臂流過的電流是三相電感電流之和,就能保證在不平衡負載條件下,逆變器三相輸出電壓對稱。
由于第四橋臂只流過零序電流,因此對第四橋臂的控制實際也可理解成對零序電壓控制。于是得到一個推論:如果能利用前三橋臂的電感電流信息構造一個零序調制信號對第四橋臂進行控制,也可以保證不平衡負載條件下,逆變器三相輸出電壓對稱。
從結論和推論可以看出,對于第四橋臂的控制必須依賴三相電感電流的信息。如果前三橋臂采用開環控制或單電壓閉環控制,由于三相電感電流的信息是無法得到的,所以很難實現三相四橋臂逆變器的優化控制,而擁有電流環的控制方法,理論上具備了實現其優化控制的可能性。
2 四橋臂逆變器三角波輔助控制策略
三相四橋臂逆變器的三角波輔助控制策略的具體方案包括兩個部分:前三橋臂(A、B、C三相)的電壓電流雙閉環PWM控制和第四橋臂(中線)的三角波構造開環控制。
2.1 前三橋臂電壓電流雙閉環PWM控制
為了滿足式(5)的關系,前三橋臂可以利用傳統的三相電壓電流雙閉環PWM控制,控制框圖如圖2所示。
A相反饋的輸出電壓uoAf與A相電壓基準信號uA比較后經過電壓控制器(PI調節器)產生電壓外環的輸出。電壓外環的輸出作為電流內環的給定iA*,A相反饋的電感電流iLAf與iA*比較后經過電流控制器(P調節器)產生電流內環的輸出uka,uka作為A相的調制波跟三角載波交截產生開關管Q1、Q2的控制信號。圖中Kuf和Kif分別為電壓采樣系數和電流采樣系數。由于A、B、C三相控制方案類似,因此B、C相的原理類似,在此不再重復敘述。
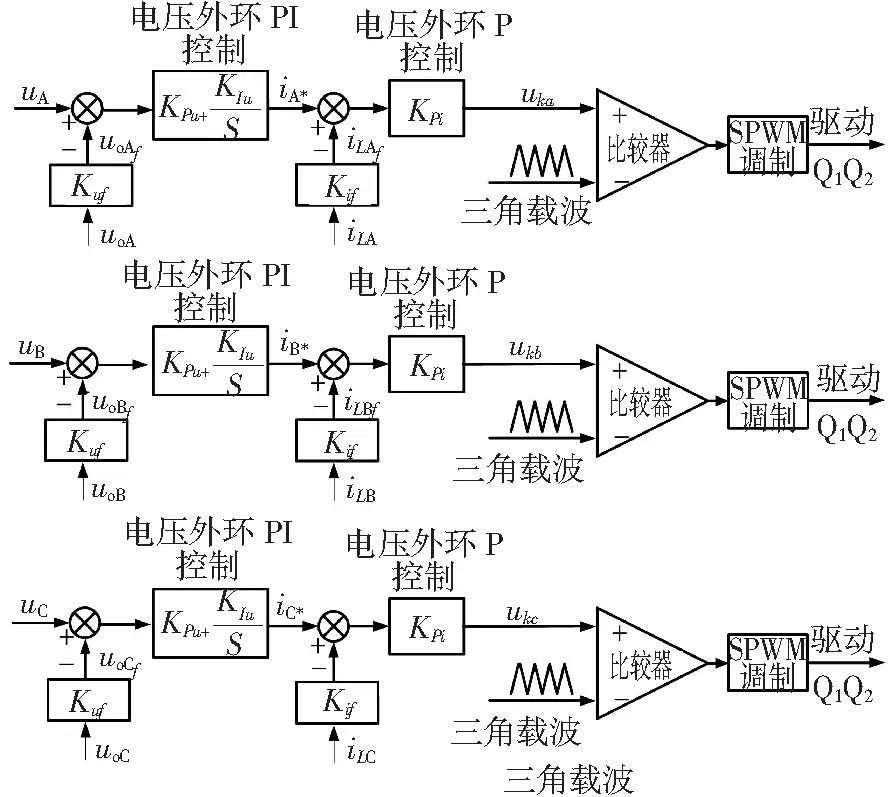
圖2 前三橋臂控制框圖
之所以采用該雙閉環控制方案的原因是:(1) 電壓給定為對稱三相正序電壓,符合三相輸出電壓的期望;(2) 即使逆變器三相負載為不平衡負載,逆變器負載電流不平衡,但通過電流環的調節可以保證電流環的輸出,也就是前三橋臂的最終的調制信號uka、ukb和ukc為對稱三相電壓而滿足式(5)。
2.2 第四橋臂三角波構造開環控制
第四橋臂三角波開環控制是通過構造一個三角波作為調制波,再將該三角調制波跟高頻三角載波交截,產生第四橋臂兩個開關管的控制信號。
首先來分析一下第四橋臂選用三角波作為調制波進行控制的原因。
假設正弦波的瞬時值為usin,其幅值為Usin,角頻率為ω,初相角為0度;三角波的瞬時值為utr,其幅值為Utr,角頻率為ωtr,初相角為0度。那么分別可得到正弦調制波的數學表達式和三角波的傅里葉級數展開表達式為
usin=Usinsinωt,
(7)
(8)
其中k為整數。
如果令ωtr=3ω。于是式(8)變為
(9)
從式(9)可以看到,當三角波的頻率是正弦波頻率的3倍時,三角波可以看成是正弦波的3、9、15次等諧波的疊加。很顯然3、9、15次等諧波都是零序諧波,因此利用三角波作為第四橋臂的調制波,實際就是一種對零序電壓控制的方案,滿足前面分析的推論,因此可保證不平衡負載條件下,逆變器三相輸出電壓對稱。
其次來分析一下三角調制波的構建方法。
第四橋臂控制信號的構建必須包含前三橋臂電感電流的信息,因此可以利用前三橋臂電流環的輸出來構造第四橋臂控制信號。
當負載不平衡時,各相電感電流是不平衡的,但經過電流閉環后生成的各相調制信號uka、ukb、ukc為對稱三相正弦波。假設其波形如圖3所示。
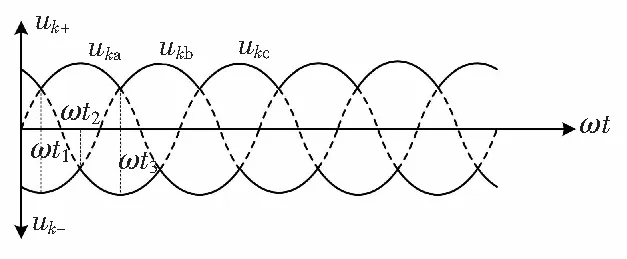
圖3 三相調制波形
觀察圖3波形中的虛線部分可以發現,其波形形狀非常接近三角波且頻率為正弦波的3倍。于是該虛線波形就是需要構造的波形。
假設uka、ukb、ukc表達式為
(10)
可以得到uka、ukb、ukc的正向包絡線波形uk+和負向包絡線波形uk-,如圖3中的實線波形。根據式(10),可得uk+和uk-的數學表達式分別為
(11)
(12)
將式(11)和式(12)進行傅里葉級數展開,并求其和,再反相,可得到表達式:
(13)
對比式(13)和式(9)可以發現,ukN的確為頻率是調制波3倍的三角波,且三角波的幅值為
(14)
于是可以得到第四橋臂控制方法是將uka、ukb、ukc輸入給三角波生成電路,該三角波生成電路利用三相正負包絡線疊加的原理構造第四橋臂的三角波調制信號ukN,然后再將ukN跟三角載波進行交截產生Q7、Q8的控制信號,控制框圖如圖4所示。
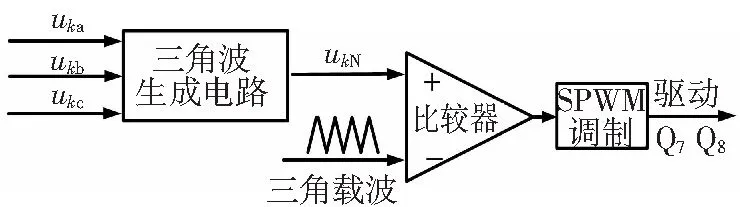
圖4 第四橋臂控制框圖
3 改進的三角波輔助控制策略
從上面分析可以看到第四橋臂利用構造的三角波輔助控制是本控制策略的核心思想,但該方法調制比不能大于1,也就是說相電壓直流電壓利用率不超過0.5,直流電壓利用率較空間矢量控制的三相四橋臂逆變器低。
為了提高直流電壓利用率,研究了一種改進的三角波輔助控制策略,通過在三相正弦調制波中注入三角波來壓低合成波形的峰值,使調制比可以大于1,從而達到提高直流電壓利用率的目的。
3.1 改進的三角波輔助控制原理
很顯然注入的三角波不能使用開環的方法生成,原因是本文中的三相正弦調制波是經過閉環控制得到的,因此沒法知道調制波的準確相位。
但觀察用來控制第四橋臂的三角波,如圖3中虛線表示的波形,可以發現如果把該波形疊加到uka、ukb、ukc中去,剛好可以壓低uka、ukb、ukc的峰值。從而可以使調制比大于1,提高逆變器的直流電壓利用率。于是得到三相四橋臂逆變器改進的三角波輔助控制原理框圖如圖5所示。
控制方案同樣包括前三橋臂(A、B、C三相)的控制和第四橋臂(中線)的控制兩個部分。前三橋臂的控制和第二小結提到的方法相比增加了三角波ukN的注入。第四橋臂的控制跟第二小結提到的方法相同。
當uka、ukb、ukc中注入ukN以后,式(5)不再成立,變為:
vA+vB+vC=3vtr。
(15)
式中vtr為注入的三角波產生的調制波形。
將式(4)和式(15)代入式(3)整理可得
(16)
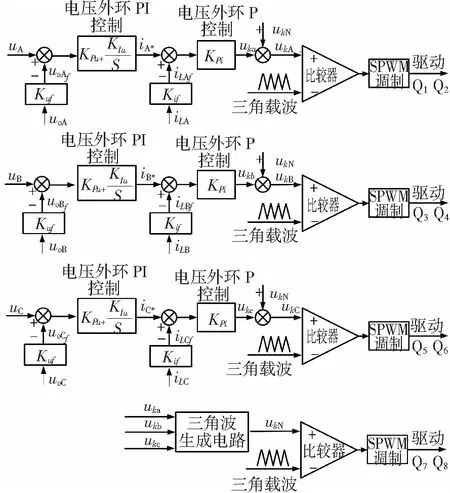
圖5 改進的三角波輔助控制策略
Fig. 5 Improved control method using an
auxiliary triangle wave
由于第四橋臂只流過零序電流,注入的三角波也是零序諧波,于是可以得到只要vN用零序諧波電壓進行控制,就可以保證不平衡負載條件下,逆變器三相輸出電壓對稱。而第四橋臂使用三角波輔助控制顯然滿足這一結論。
3.2 三角波注入幅值與最大直流電壓利用率
從圖3可以看到,注入的三角波其初相角為零度,那么A相正弦調制波疊加三角波以后的表達式為
ukA=Usinsinωt+
(17)
由于當ωt=π/6時,三角波取得正向峰值,之后正弦波幅值增加,三角波幅值減小,這種情況下只要能保證三角波下降的速度比正弦波增加的速度快,那么ωt=π/6就是ukA的極大值點,且極大值為
(18)
式(18)滿足的條件是
(19)
根據式(18)和式(19),如果以Utr為變量,可以得到,當Utr=0.45Usin時,UkAmax為0.95Usin。可見三角波和正弦波疊加后的合成波形的幅值較正弦波的幅值小,這有利于提高直流電壓利用率。

(20)
從式(20)可以看到,式中有兩個可變量一個是Utr,另一個是ωt,如果確定了Utr的值,就可算出極值點所對應的ωt的值,從而計算出UkAmax的值。表1列出了一組計算結果。
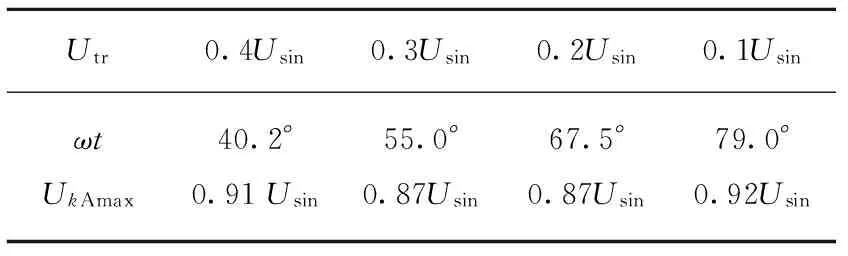
表1 UkAmax計算結果
從計算結果可以看到,當注入的三角波的幅值是正弦波幅值的0.2~0.3倍時,UkAmax的數值較小,這種情況下直流電壓利用率大約可以提高15%。
綜合以上分析,改進的三角波輔助控制策略在三相調制波中注入控制第四橋臂的三角波,不但不會影響三相四橋臂逆變器的帶不平衡負載能力,還可有效壓低調制波的幅值,提高了逆變器的直流電壓利用率。
4 仿真結果
利用Saber仿真軟件對三相四橋臂逆變器的三角波輔助控制策略進行了仿真,仿真電路參數為:輸入電壓300 VDC,開關頻率20 kHz,輸出三相電壓115 VAC,頻率400 Hz,三相額定功率6 kVA,三相濾波電感180 μH,濾波電容25 μF,中線電感 17 μH。
圖6給出了無三角波注入和改進后有三角波注入的不平衡負載下的逆變器仿真對比波形。圖中uoA、uoB、uoC分別表示A、B和C相的輸出電壓,iLA、iLB和iLC分別表示A、B和C相電感電流。
從圖中各相電感電流波形可以看到三相負載是不平衡的,但三相輸出電壓依然保持平衡,這說明本控制策略可確保三相四橋臂逆變器具有較強的帶不平衡負載的能力。但是對于改進后有三角波注入的控制方法,由于直流電壓利用率高,在相同直流輸入電壓情況下,逆變器輸出電壓正弦度明顯好于無三角波注入的控制方法,電感電流的脈動也有所減小。
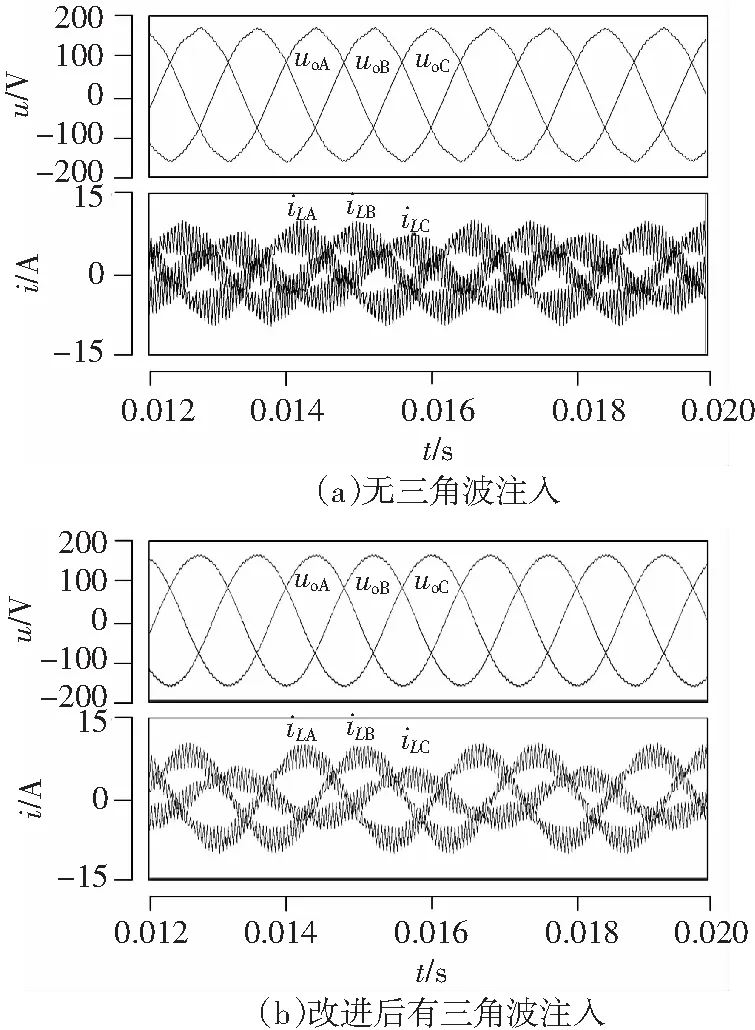
圖6 不平衡負載仿真波形
圖7為采用改進后控制方法的A、B、C三相和第四橋臂的調制信號仿真波形。
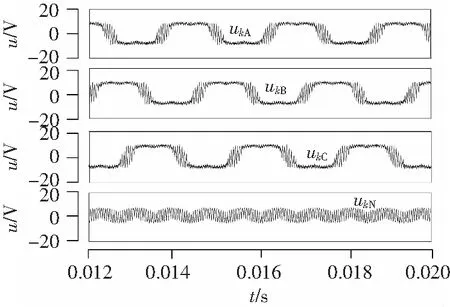
圖7 調制信號仿真波形
從波形可以看到第四橋臂的調制信號ukN并不是一個理想的三角波,而是一個存在一定脈動的三角波,這是因為三相電流環輸出的波形必然存在脈動,那么由三相電流環輸出波形合成的ukN必然也存在一定脈動。此外還可以看到注入了ukN的三相調制波ukA、ukB、ukC已經變成了鞍形波,這樣可使逆變器調制比大于1,從而有效提高逆變器的直流電壓利用率。
5 實驗驗證
設計了一臺跟仿真參數一致的實驗原理樣機,采用改進后的三角波輔助控制策略,可以得到以下實驗波形。
圖8為原理樣機三相空載時的三相輸出電壓的實驗波形。
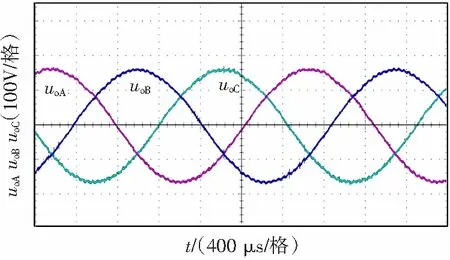
圖8 空載實驗波形
圖9為原理樣機三相帶額定阻性負載時的三相輸出電壓、三相電感電流和中線電感電流實驗波形。
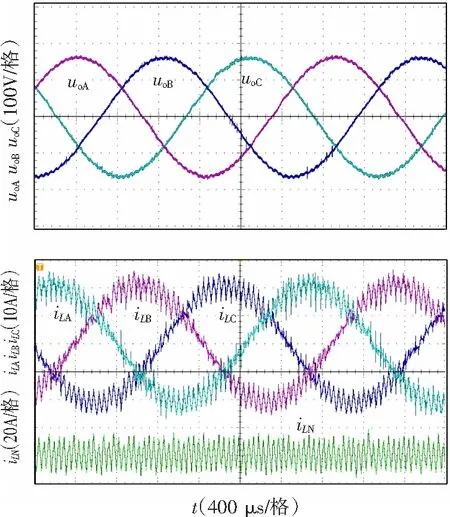
圖9 額定負載實驗波形
圖10為原理樣機三相帶不平衡阻性負載時的三相輸出電壓、三相電感電流和中線電感電流實驗波形。
由以上實驗結果可以看出,采用改進的三角波輔助控制的三相四橋臂逆變器無論在平衡負載還是不平衡負載情況下三相輸出電壓正弦度較高,THD不大于1.5%,三相輸出電壓也較對稱,電壓幅值不平衡不大于±1%。
在相同參數下,采用未改進的無三角波注入的控制方法也進行了類似的實驗,實驗結果表明輸出電壓如果要達到以上波形的質量,逆變器直流輸入電壓需要加至340 V,高于改進控制方法的300 V,否則就會出現類似圖6(a)中的輸出電壓畸變。可見改進的控制方法有利于提高逆變器直流電壓利用率。
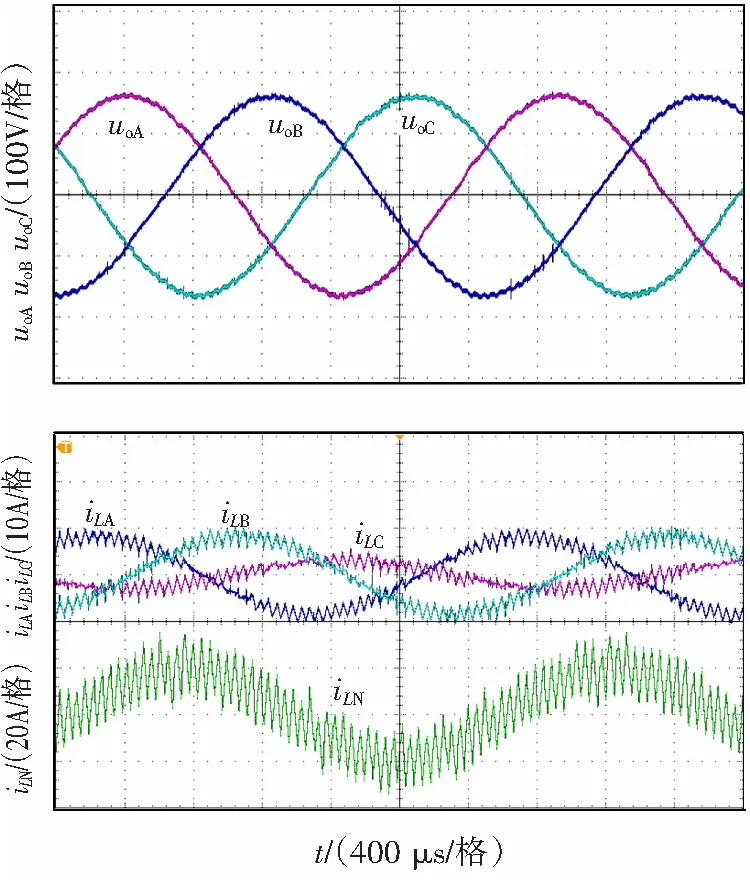
圖10 不平衡負載實驗波形
6 結 論
本文提出了一種三相四橋臂逆變器的三角波輔助控制策略及其改進方法,給出了所需三角波的構造方法,分析了三角波幅值對直流電壓利用率的影響,從整個控制策略看具有原理簡單易實現的特點。針對該控制策略進行了仿真和實驗驗證,結果表明該控制策略還具有以下特點:①無論是三相平衡負載或是三相不平衡負載,逆變器輸出電壓波形正弦度較高,THD可達1.5%以下,輸出電壓對稱形較好,電壓幅值不平衡不超過±1%;②前三橋臂可采用三角波注入控制也可以不采用三角波注入控制,這對逆變器輸出電壓的正弦度和對稱性影響不大,但采用三角波注入的方案比不采用的方案直流電壓利用率約高15%。
[1] 劉德紅,汪光森,胡安,等. 三相逆變器在不平衡負載下的2種調制策略對比[J]. 電力自動化設備,2009,29(1):41-45.
LIU Dehong,WANG Guangsen,HU An et al. Comparison between two modulation strategies of three-phase inverter with unbalanced load[J]. Electric Power Automation Equipment,2009,29(1):41-45.
[2] 董鋒斌,皇金鋒,傅周興. 一種三相四橋臂逆變器的數學模型分析[J]. 電力自動化設備,2011,31(6): 98-101.
DONG Fengbin,HUANG Jinfeng,FU Zhouxing. Analysis of mathematical model for three-phase four-leg inverter[J]. Electric Power Automation Equipment,2011,31(6):98-101.
[3] OLORUNFEMI Ojo, PARAG M Kshirsagar. Concise Modulation Strategies for Four-leg Voltage Source Inverter[J]. IEEE Transactions on Power Electronics, 2004, 19(1): 46-53.
[4] DHAVAL C Patel, RAJENDRA R Sawant, MUKUL C Chandorkar. Three-dimensional flux vector modulation of four-leg sine-wave output inverters[J]. IEEE Transactions on IE, 2010, 57(4):1261-1269.
[5] 熊宇. 基于DSP的四橋臂三相逆變器研究[D]. 南京:南京航空航天大學,2003.
[6] 龔春英, 熊宇, 酈鳴, 等. 四橋臂三相逆變器電源的三維空間矢量控制技術研究[J]. 電工技術學報, 2004, 19(12): 29-36.
GONG Chunying, XIONG Yu, LI Ming, et al. Study of space vector modulation of four-legged three-phase inverter[J]. Transactions of China Electrotechnical Society, 2004, 19(12): 29-36.
[7] 王慧貞, 丁勇, 張方華, 等. 開關點預置的四橋臂三相逆變器[J]. 中國電機工程學報, 2008, 28(3):73-76.
WANG Huizhen, DING Yong, ZHANG Fanghua, et al. Four-leg three-phase inverter based on switching-node preset[J]. Preceedings of the CSEE, 2008, 28(3): 73-76.
[8] 張方華, 丁勇, 王慧貞, 等. 四橋臂三相逆變器的特定諧波消除控制[J]. 中國電機工程學報, 2007, 27(7): 83-87.
ZHANG Fanghua, DING Yong, WANG Huizhen, et al. The SHE control strategy on three-phase four-leg inverter[J]. Preceedings of the CSEE, 2007, 27(7): 83-87.
[9] 阮新波,嚴仰光. 四橋臂三相逆變器的控制策略[J]. 電工技術學報,2000,15(1): 61-64.
RUAN Xinbo, YAN Yangguang. The control strategy for three-phase inverter with four bridge legs[J]. Transactions of China Electrotechnical Society, 2000, 15(1): 61-64.
[10] 戴訓江,晁勤. 一種新穎的并網逆變器自適應電流滯環控制策略[J]. 電力自動化設備,2009,29(9):85-89.
DAI Xunjiang,CHAO Qin. Adaptive current hysteresis control of grid-connected inverter[J]. Electric Power Automation Equipment,2009,29(9):85-89.
[11] 陳宏志, 劉秀翀. 四橋臂三相逆變器的解耦控制[J]. 中國電機工程學報, 2007, 27(19): 74-79.
CHEN Hongzhi, LIU Xiuchong. Decoupling control of three-phase four-legged inverter[J]. Preceedings of the CSEE, 2007, 27(19): 74-79.
[12] 劉秀翀, 張化光, 陳宏志. 四橋臂逆變器中第四橋臂的控制策略[J]. 中國電機工程學報, 2007, 27(33): 87-92.
LIU Xiuchong, ZHANG Huaguang, CHEN Hongzhi. Control strategy of the fourth leg in four-leg inverter[J]. Preceedings of the CSEE, 2007, 27(33): 87-92.
[13] 張曉勇,王軍,李川,等. 基于三維空間矢量中Υ分量控制的三相四橋臂逆變器[J]. 電力自動化設備,2010,30(12):70-73.
ZHANG Xiaoyong,WANG Jun,LI Chuan et al. Three-phase four-leg inverter based on Υ component control in three-dimensional space vector[J]. Electric Power Automation Equipment,2010,30(12):70-73.
[14] 孫馳, 馬偉明, 魯軍勇. 三相逆變器輸出電壓不平衡的產生機理分析及其矯正[J], 中國電機工程學報, 2006, 26(21): 57-64.
SUN Chi, MA Weiming, LU Junyong. Analysis of the unsymmetrical output voltage distortion mechanism of three-phase inverter and its correction[J]. Preceedings of the CSEE, 2006, 26(21): 57-64.
[15] 孫馳, 魯軍勇, 馬偉明. 一種新的三相四橋臂逆變器控制方法[J]. 電工技術學報, 2007, 22(2): 57-63.
SUN Chi, LU Junyong, MA Weiming. A novel control method for three-phase four-leg inverter[J]. Transactions of China Electrotechnical Society, 2007, 22(2): 57-63.
[16] 孫馳, 畢增軍, 魏光輝. 一種新穎的三相四橋臂逆變器解耦控制的建模與仿真[J]. 中國電機工程學報, 2004, 24(1): 124-130
SUN Chi, BI Zengjun, WEI Guanghui. Modeling and simulation of a three-phase four-leg inverter based on a novel decoupled control technique[J]. Preceedings of the CSEE, 2004, 24(1): 124-130
(編輯:劉素菊)
Control strategy of three-phase four-leg inverter using an auxiliary triangle waveform
MA Hai-xiao1, YE Hai-yun1, GONG Chun-ying2
(1.College of Automation Engineering, Nanjing University of Posts and Telecommunications, Nanjing 210023, China;2. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The common control methods of Three-phase four-leg inverter are open loop control or need a lot of tedious calculation. These methods are not fit for medium-high frequency inverters, which require higher dynamic and static performance. In order to overcome these shortcomings, a control strategy of Three-Phase Four-Leg inverter using an auxiliary triangle waveform was proposed. This control strategy was based on voltage-current double closed loop control principle. Through establishing the voltage and current equations of Three-phase four-leg inverter and deriving the conditions of ensuring the symmetry of three-phase output voltages, the important roles of triangle waveform were found to control all the legs. In this strategy, the first three legs adopted voltage-current double closed loop control method with a triangle wave injection. The modulation ratio could be greater than one, so it can improve the utility ratio of DC voltage. The fourth leg adopted Pulse Width Modulation control method using a composed triangle wave as the modulation signal. The control of this leg ensured that three-phase output voltages were symmetrical when the inverter supply unbalanced loads. A 6kVA prototype was designed. The results of simulation and experiment proved the feasibility of this control strategy.
three-phase four-leg inverter; triangle waveform; double closed loop control; symmetrical component method; zero sequence harmonic
2014-11-11
國家自然科學基金(51107057)
馬海嘯(1980—), 男,博士,副教授,碩士生導師,研究方向為電力電子與電力傳動;
馬海嘯
10.15938/j.emc.2016.01.003
TM 464
A
1007-449X(2016)01-0014-08
葉海云(1989—), 女,碩士研究生,研究方向為電力電子與電力傳動;
龔春英(1965—), 女,博士,教授,博士生導師,研究方向為電力電子與電力傳動。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
