DGPS改正數據的發送方法── GNSS衛星導航定位方法之三
2016-12-01 05:40:05劉基余
數字通信世界 2016年8期
劉基余
(武漢 測繪學院,武漢 430079)
DGPS改正數據的發送方法── GNSS衛星導航定位方法之三
劉基余
(武漢 測繪學院,武漢 430079)
本文論述了DGPS改正數據的下述三種方法:一是DGPS數據鏈;二是無線電信標臺;三是靜止地球軌道(GEO)衛星。
DGNSS改正數據;GPS信號接收機;GEO衛星
當作實時DGNSS測量時,動態接收機需要接收來自基準接收機的DGNSS改正數據,后者的發送方法主要有下列形式:一是DGNSS數據鏈;二是無線電信標臺;三是靜止地球軌道(GEO)衛星(簡稱為“靜地衛星”)。本文以DGPS改正數據的發送方法為例,對上述三種發送方法的基本功能予以簡要論述。
1 DGPS數據鏈的構件功能
所謂“DGPS數據鏈”,就是一種用于作差分導航定位的無線電收發設備,除了基準接收機和動態接收機以外,還需要基準接收機的DGPS數據無線電發送機,以及動態接收機的DGPS數據無線電接收機,并通過RS-232-C接口與GPS信號接收機相連接(如圖1A所示)。DGNSS數據鏈與DGPS數據鏈相似,僅以GNSS信號接收機代替了GPS信號接收機。
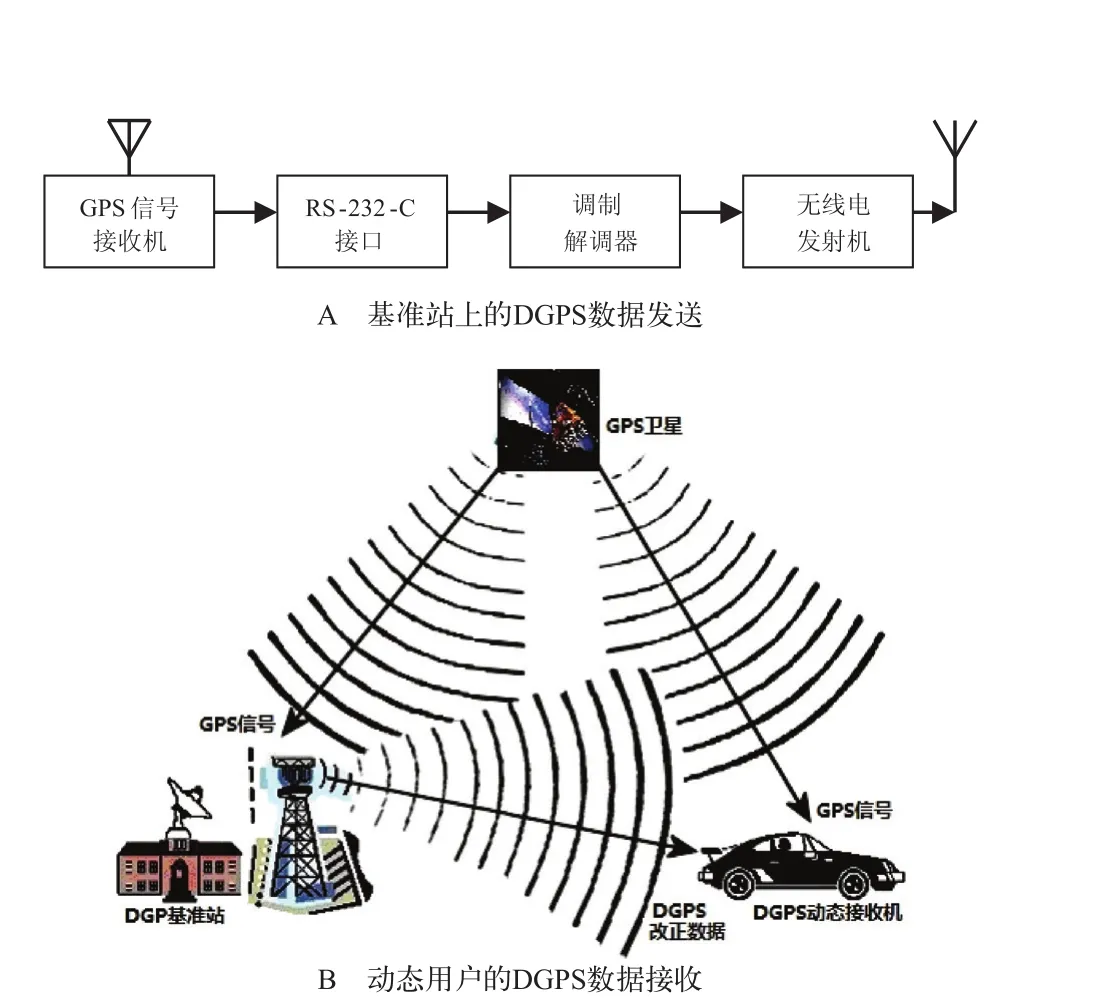
圖1 DGPS數據的發送與接收
1.1 RS-232-C接口
它是數據終端設備和數據通信設備之間的串行二進制數據交換的接口。在基準站上,它將DGPS數據送到調制解調器;在動態站上,RS-232-C接口從調制解調器取得DGPS數據,進而將它送到GPS信號接收機。通常,RS-232-C接口的插頭(針)連接GPS信號接收機,它的插座連接調制解調器;其連接電纜的最長物理長度一般不應超過15m。RS-232-C接口工作于負邏輯。負電壓表示邏輯“1”,驅動器的輸出電壓必須在-5~-15V之間;數據線工作于傳號狀態,控制線則處于“OFF”狀態。正電壓表示邏輯“0”,驅動器的輸出電壓必須在+5~+15V之間;數據線處于空號狀態,控制線則工作于“ON”狀態。RS-232-C的驅動電路必須能夠承受電纜中任何導線的短路,而不會導致相關設備的損壞。
1.2 調制解調器
在基準站上,調制解調器(Modem),是將DGPS數據進行編碼,進而將它調制在載波上,送到無線電發射機。在動態站上,調制解調器,從已調波中解調出DGPS數據,通過RS-232-C接口送到GPS信號接收機。所謂“調制”,就是用DGPS編碼信號改變載波某一參數的結果。所用載波一般為正弦波,它有三個參數:振幅、頻率和相位。用DGPS編碼信號改變這三個參數之一,就分別生成調幅波、調頻波和調相波,這三者統稱為已調波。解調,是調制的相反過程(反調制),它是從已調波中解調出DGPS數據。DGPS編碼信號,是一種數字信號。用數字信號調制載波時,分成數字調幅、數字調頻和數字調相三種調制方式。三者的細分如下:
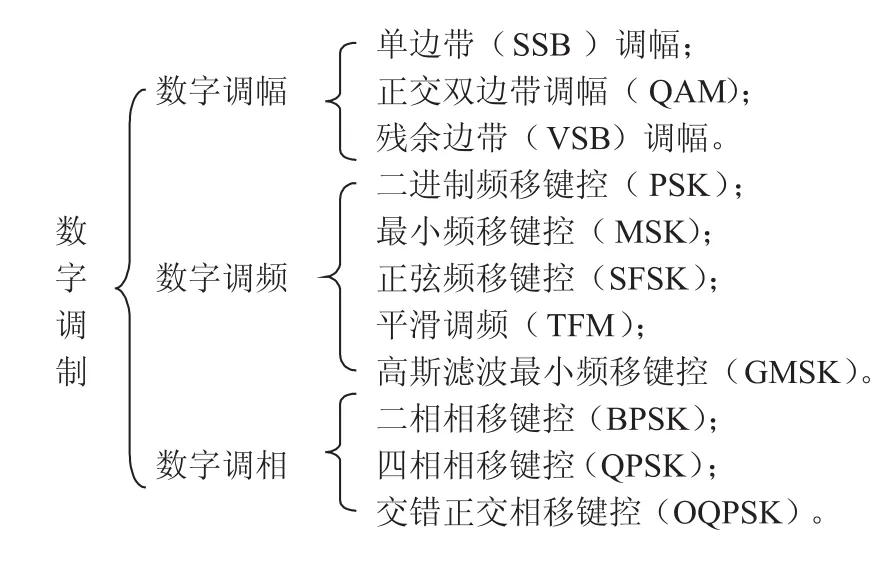
采用上述哪一種調制方式發送DGPS數據,取決于所用的調制速率。后者分為下列六種:300b/s,600b/s,1200b/s,2400b/s,4800b/s和9600b/s。若用低調制速率(300b/s和600b/s),一般采用二進制頻移鍵控數字調頻式;如用中等調制速率(1200b/s和2400b/s),通常采用最小頻移鍵控(MSK)數字調頻式,或是高斯濾波最小頻移鍵控(QMSK)數字調頻式;當用高調制速率時,采用二相相移鍵控(BPSK)數字調相式,或是四相相移鍵控(QPSK)數字調相式。
1.3 無線電收發機
在基準站上,無線電發射機是以電磁波的形式,將DGPS數據發送給用戶,其載波頻率及其發射功率的選用,取決于DGPS數據的傳輸遠近。發送DGPS數據可采用下述方式之一:
⊙ 高頻(H F)、甚高頻(V H F)、超高頻(UHF)無線電發送設備。
⊙ 無線電信標臺。
⊙ 調頻(FM)副載波。
⊙ 衛星通信設備。
在上述DGPS數據發送中,按照無線電發送設備的建立之異,可分為“商品型”和“公用型”。商品型無線電發送設備,一般采用高頻(HF)、甚高頻(VHF)、超高頻(UHF)之一作載波,而為用戶建立自已的專用DGPS數據源。當采用無線電信標臺、調頻廣播電臺的調頻(FM)副載波、衛星通信設備等發送DGPS數據時,只要在其覆蓋區內的廣大用戶,都能夠接到它們所發送DGPS數據,稱之為公用DGPS數據源。當用公用DGPS數據源作DGPS測量時,一個動態用戶只需持有一臺與公用DGPS數據源相匹配的無線電接收機和一臺GPS信號接收機,就可以進行DGPS測量,而獲得高精度的點位坐標。若用專用DGPS數據源,一個動態用戶不僅要購買兩臺GPS信號接收機,而且需要購買一套DGPS數據鏈。
2 RBN-DGPS公用數據源
國際上建立最早的公用DGPS數據源,是無線電信標臺發送的DGPS數據。無線電信標(RBN,Radio Beacons)工作于285-325kHz頻段,利用全方位發射天線,提供導航信息,而用于船舶和飛機的無線電導航。為飛機飛行服務的航空信標,可達到3~10度(2σ)的方位測量精度;用于船舶導航的無線電信標,可達到3度以內的方位測量精度。據統計,全球約有18萬個無線電信標臺,用于飛機航行導航;約有50萬個無線電信標臺,用于船舶航行導航。我國也為航海航空建立了幾十個無線電信標臺,這些信標臺大多采用高達40m的發射天線,其發射功率多數為500W左右。從1995年至2000年,中國海事局組織天津海事局等15個所屬單位,在我國的渤海、黃海、東海和南海四大海域,建立了由20個航海無線電信(指向)標(RBN)播發臺構成的“中國沿海RBN-DGPS系統”;該系統中的每一個RBN播發臺處,均設置了GPS基準站,測定各顆在視GPS衛星的偽距差分改正數,并將該DGPS數據傳送到RBN播發臺;以最小頻移控(MSK)調制到無線電信標載波頻率(283.5-325.0kHz)上,而發向各個GPS動態用戶。該用戶只需持有一臺能夠同時接收DGPS數據的GPS信號接收機,便可實現DGPS測量,而獲得不低于±5m的在航定位精度(如表1所示)。從該表可見,用戶定位精度隨著DGPS距離的增長而降低。圖2表示各個RBN播發臺的DGPS播發信號覆蓋(最遠可達300km)和臺站分布。
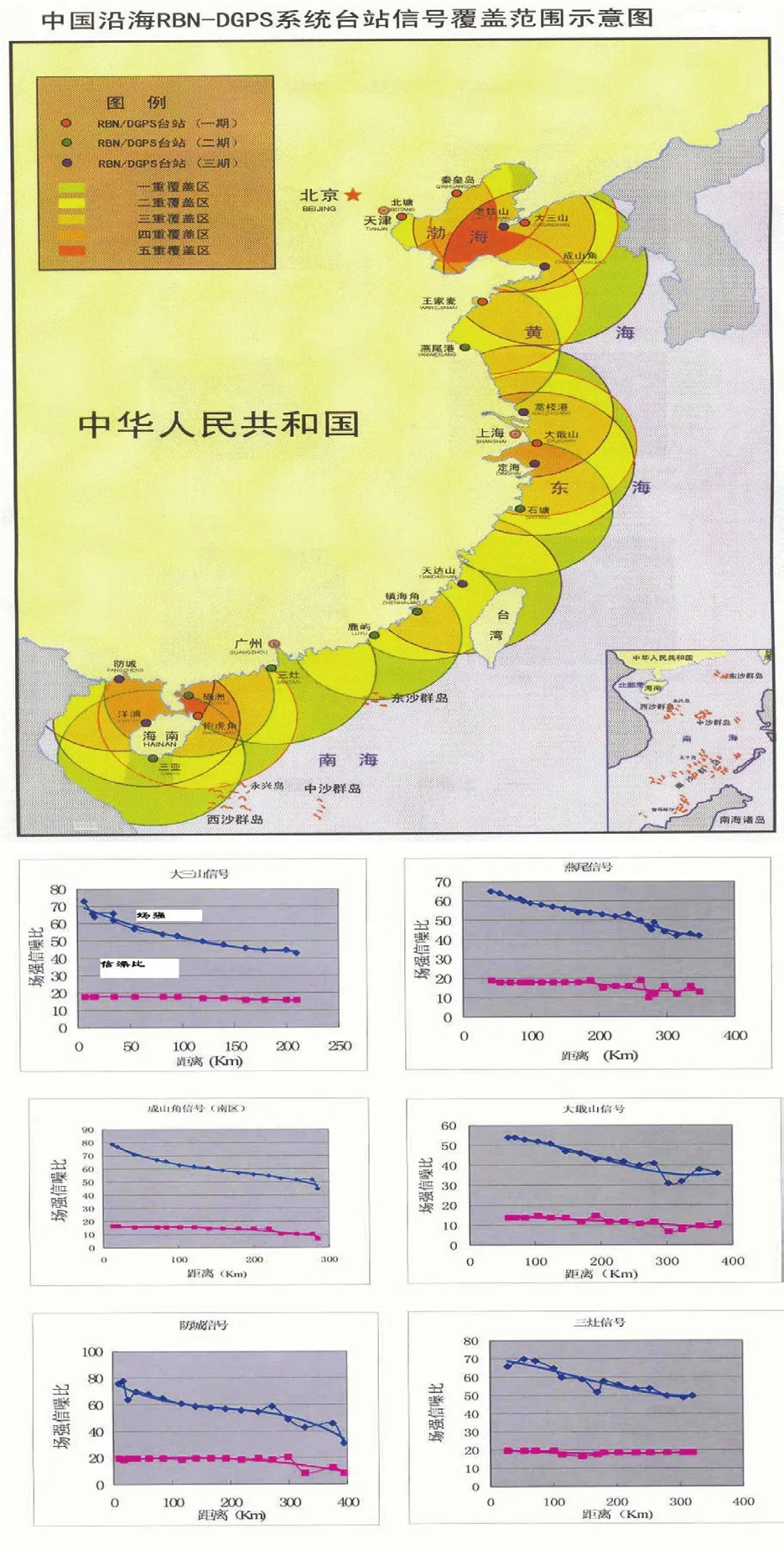
圖2 中國沿海RBN-DGPS系統的DGPS播發信號覆蓋和臺站分布
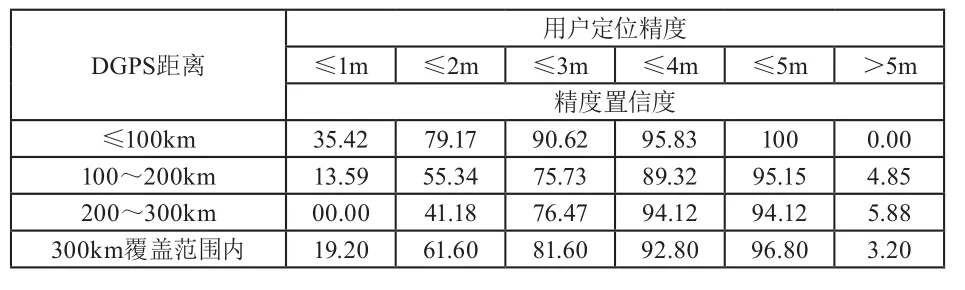
表1 中國沿海RBN-DGPS系統的用戶定位精度及其置信度
3 靜地衛星發送DGPS數據
3.1 INMARSAT衛星發送DGPS數據
從1996年到1998年,共有5顆INMARSAT-3衛星先后入軌運行。該5顆靜地衛星都附設了導航專用轉發器,而成為于WAAS和EGNOS的一個組成部分,用于增強北美和歐洲地區GPS/GLONASS信號的可用性、完好性和導航定位精度。INMARSAT-3衛星,用一根L1專用導航定位信號發送天線,向用戶發送第一導航定位信號(L1)和DGPS數據(如圖3所示),其功率為27.5dBW,其帶寬為2.2MHz。
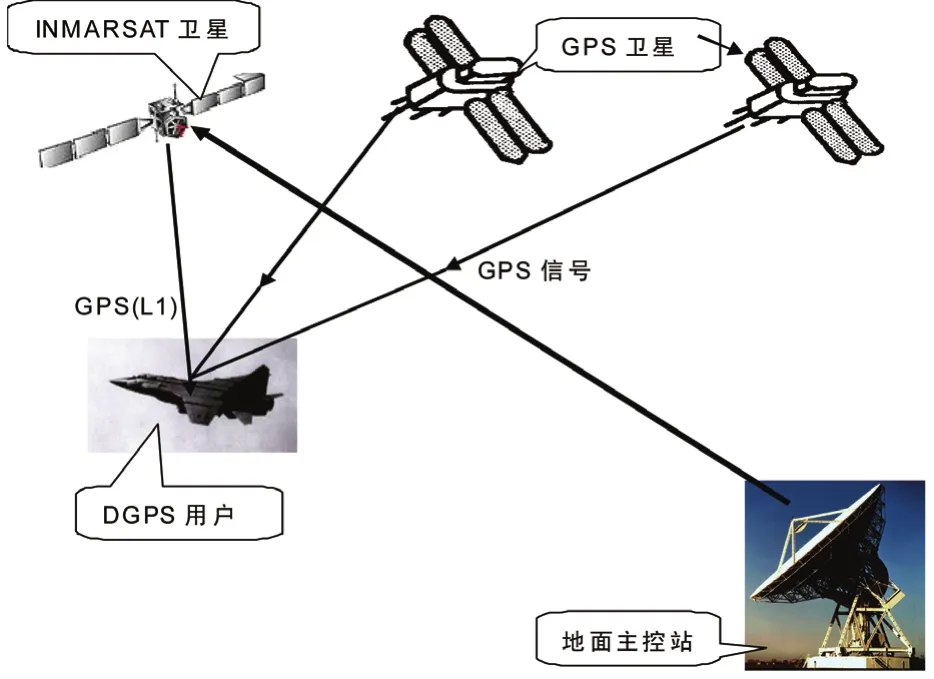
圖3 INMARSAT衛星發射DGPS數據
GPS現代化后,GPS III衛星將增設第三導航定位信號(L5)。為適應GPS衛星這種內部增強措施,正在研制的4顆INMARSAT-4衛星,也將附設導航專用轉發器,而用L1/L5專用導航定位信號發送天線,向用戶發送第一、三導航定位信號(L1和L5)和DGPS數據,L1和L5的功率分別為28.1dBW和26.2dBW,L1和L5的頻帶寬度分別為4.0MHz和20.0MHz。圖4表示INMARSAT-4衛星L1/L5導航定位信號的生成框圖,該圖收發信號的主要參數如表2所示。值得注意的是,INMARSAT-3/4衛星所發的L1信號,其C/A碼速率和載波頻率,不像GPS衛星一樣,保持在1∶1540的恒定比率上。

表2 INMARSAT-3/4衛星的導航載荷比較
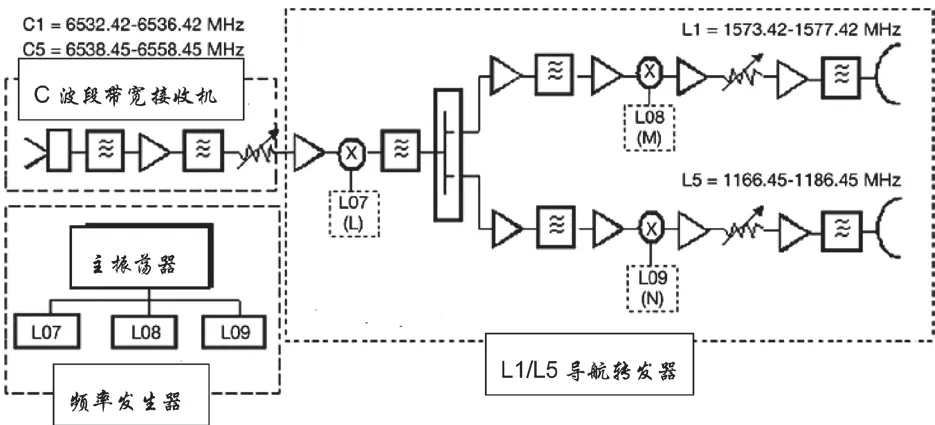
圖4 INMARSAT-4導航轉發器框圖
INMARSAT-3/4衛星,不僅發送DGPS數據,而且發送GPS衛星的完好性數據和GPS導航定位信號。后者相當于增加了GPS衛星星座的在軌工作衛星,而能夠改善PDOP值,其改善程度如表3所示。

表3 PDOP的改善
3.2 GLONASS SDCM差分改正系統
在DGPS測量中,為了克服單基準站所導致的測量精度不均勻性,人們采用了多個地面基準站組成地面基準網,而生成DGPS改正數據。例如,WADGPS廣域差分測量、WAAS廣域增強系統、EGNOS歐洲靜地衛星導航重疊系統和GDGPS全球差分系統。近年來,俄羅斯正在積極建設類似于美國的WAAS系統,稱之為SDCM差分改正與監測系統(GLONASS System of Differential Correction and Monitoring),如圖5所示。

A GLONASS SDCM差分改正的廣泛應用
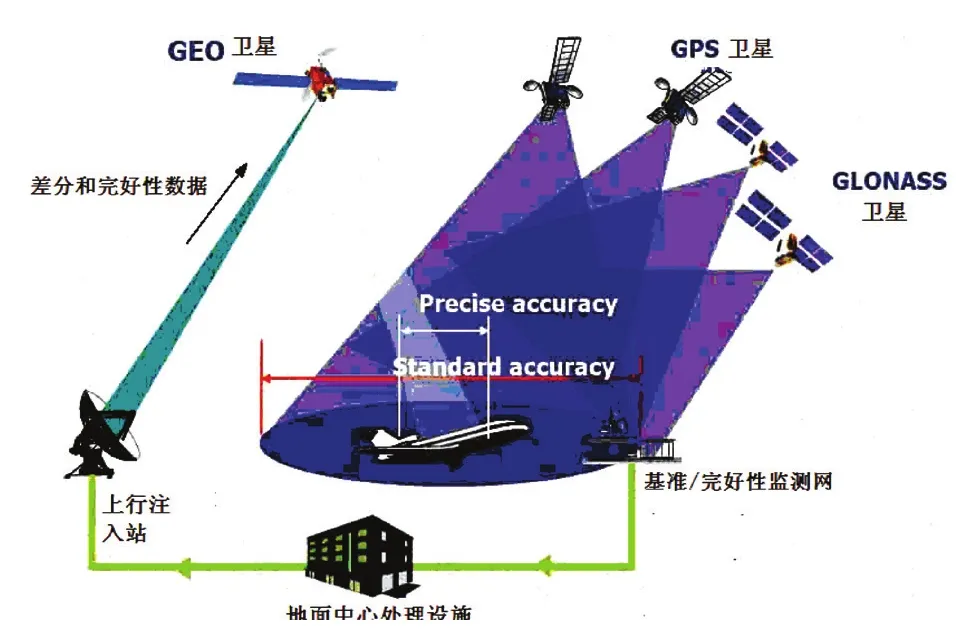
圖5 GLONASS SDCM差分改正系統
從圖5可見,它不僅提供DGLONASS數據,而且提供DGPS數據;并期盼實時定位的二維測量精度達到±1~1.5m,高程測量精度達到±2~3m;在基準站附近的200km以內,能夠實現下列高精度實時定位:二維測量精度達到±1~2cm,高程測量精度達到±4~6cm。2011年12月發射了Luch-5A靜地衛星、2012年12月發射了Luch-5B靜地衛星己于2013年1月7日11:07(UTC時間)起,開始播發DGLONASS/DGPS差分信號)和2013年12月發射了Luch-4靜地衛星,它們分別定點在西經16°、東經95°和東經167°,都發射L1導航定位信號,以此建成SDCM差分改正與監測系統。這給我們提供了機遇,我國的部分地區,也許能夠利用SDCM數據做實時的DGPS/DGLONAS測量定位,而獲得米級精度的實時定位成果。
3.3 北斗廣域差分增強系統
北斗衛星導航系統的廣域差分增強系統類似于GPS WAAS系統,它的基本思想是:對北斗導航衛星三個頻率的偽距觀測量的誤差源予以區分,并對每一誤差源進行“模型化”,然后計算各個誤差的差分改正值。北斗廣域差分增強系統對衛星星歷誤差、衛星鐘誤差和電離層延遲等三個誤差源進行分析。主控站將處理得到的廣域差分改正信息通過地面站傳輸到GEO衛星,再由該衛星傳送給用戶。GEO衛星實時傳送能力強,覆蓋區域大,在傳送差分改正信息的同時,還作為衛星測距源播發三個頻率的導航信號,使得用戶的定位精度和可靠性都高于廣域差分系統,因此稱其為廣域差分增強系統。我國的北斗廣域差分增強系統具有自身的特點,它將與衛星有關的誤差合并為一項,稱為衛星等效鐘差改正數。對于電離層延遲采用的是格網改正法,計算電離層格網點垂直延遲。因此,我國廣域差分增強系統提供兩類差分改正信息:衛星等效鐘差和格網電離層延遲。我國廣域差分增強系統在提供差分改正信息的同時,還需監測這些改正信息的精度,為用戶提供完好性信息。其中,衛星星歷改正和衛星鐘差改正的誤差綜合給出,以UDRE(用戶差分偽距誤差)和RURA(區域用戶距離精度)表示,電離層格網點垂直延遲改正的誤差用GIVE表示。通過對UDRE、RURA和GIVE的確定和驗證,實現對我國廣域差分增強系統完好性的監測。
4 結束語
上文以DGPS改正數據的發送方法為例,對DGPS數據鏈、無線電信標臺和靜止地球軌道衛星三種發送方法的基本功能予以了簡要論述。當采用無線電信標臺、調頻廣播電臺的調頻(FM)副載波和靜止地球軌道衛星之一發送DGPS改正數據時,只要在其覆蓋區內的廣大用戶,都能夠接到它所發送DGPS改正數據;稱之為公用DGPS數據源。當用公用DGPS數據源作DGPS測量時,一個動態用戶只需持有一臺與公用DGPS數據源相匹配的無線電接收機和一臺GPS信號接收機,就可以進行DGPS測量,而獲得高精度的點位坐標。若用專用DGPS數據源,一個動態用戶不僅要購買兩臺GPS信號接收機,而且需要購買一套DGPS數據鏈。這就需要依市價予以選購了。
[1] 劉基余.GPS衛星導航定位原理與方法(第二版).北京 京科學出版社,2008.6
[2] G. Lachapelle, GPS Theory and Applications, University of Calgary, Fall 2000, PP.310
[3 http://www.navcen.uscg.mil/ GPS, DGPS, LORAN-C, OMEGA, navigation systems, GPS navigation, DGPS navigation.
The Transmission Method of DGPS Correction Data -- Method of GNSS Navigation/Positioning (3)
Liu Jiyu
(School of Geodesy and Geomatics, Wuhan University, Wuhan, 430079)
This paper discusses the following three ways transmitting DGPS correction data: the first is DGPS data links; the second is the radio beacon; the third is the geostationary earth orbit satellite.
DGPS Correction Data; GPS signal receiver; GEO satellite
10.3969/J.ISSN.1672-7274.2016.08.002
TN96 文獻標示碼:A
1672-7274(2016)08-0007-05
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39