升降舵輔助操縱的自轉旋翼機自適應姿態控制
2016-12-06 07:07:53林清蔡志浩閆坤王英勛
航空學報 2016年9期
林清,蔡志浩,*,閆坤,王英勛
1.北京航空航天大學 自動化科學與電氣工程學院,北京 100083 2.北京航空航天大學 飛行器控制一體化國防重點實驗室,北京 100083
升降舵輔助操縱的自轉旋翼機自適應姿態控制
林清1,2,蔡志浩1,2,*,閆坤1,2,王英勛1,2
1.北京航空航天大學 自動化科學與電氣工程學院,北京 100083 2.北京航空航天大學 飛行器控制一體化國防重點實驗室,北京 100083
針對常規自轉旋翼機俯仰操縱方式存在的問題,提出了一種升降舵輔助操縱的自轉旋翼機布局。采用解析葉素積分方法建立了自轉旋翼氣動模型,通過與風洞試驗數據及數值葉素積分法的對比驗證了其合理性。提出了基于神經網絡動態逆的自轉旋翼機姿態控制方法,采用動態逆技術設計了基本控制器,采用在線神經網絡自適應補償建模誤差、外界干擾和設計模型誤差導致的不確定逆誤差。提出了基于動態控制分配技術的升降舵-旋翼縱向周期變距分配方法,以協調二者在控制效率和帶寬方面的差異。仿真結果表明,提出的升降舵輔助操縱方式可以有效地降低旋翼機槳盤的調整頻率和幅值;提出的姿態控制方法具有良好的控制性能和魯棒性;動態控制分配器能夠合理地協調升降舵和旋翼縱向周期變距。
自轉旋翼機;升降舵輔助;姿態控制;動態逆;動態控制分配
自轉旋翼機(簡稱旋翼機)是以無動力自轉旋翼作為主要升力面和操縱面,發動機牽引/推動作為前進動力的旋翼類飛行器[1]。旋翼機具有獨特的優勢:與固定翼飛機相比,旋翼機低速性能好,且可實現短距起降;與直升機相比,旋翼機結構簡單,空重比低,且氣動效率更高[2]。近年來,旋翼機在商業和軍事上的應用潛力逐漸受到重視,再次成為航空領域關注的熱點。
Houston等以輕型有人旋翼機為研究對象,先后開展了旋翼機空氣動力學[3]、飛行動力學[4]、適航性[5]及飛行 品 質[6]等方面 的 研 究,為后續的旋翼機飛行控制等方面的研究打下了基礎。李建波等在旋翼機空氣動力學[7]、旋翼機總體設計[8]、飛行動力學及飛行性能[9]及復合式旋翼機飛行動力學[10-11]等方面開展了長期的研究,推動了國內旋翼機技術的發展。陳淼[12]對無人自轉旋翼機的飛行控制問題進行了有益的探索,主要采用線性魯棒控制方法研究了無人旋翼機的縱向控制問題,但其控制所用的旋翼機模型未能體現對于旋翼機而言非常關鍵的旋翼自轉特性。
目前,國內外對于旋翼機的研究主要集中在空氣動力學與飛行動力學方面,而對其飛行控制問題研究較少。這一方面是由于目前的旋翼機起飛重量較小,仍可以沿用原始的機械操縱方式;另一方面也囿于旋翼機空氣動力學與飛行動力學的研究程度,現代飛行控制技術未能很好地應用于旋翼機。
隨著旋翼機起飛重量與飛行速度的提高,傳統的機械操縱方式將不再適用。例如,Carter航空技術公司的復合式旋翼機試飛員指出,旋翼機的機械操縱系統特性在整個速度范圍內變化很大,高速時旋翼狀態對于操縱桿量非常敏感,易出現操縱過量和大幅縱向振蕩,嚴重影響飛行安全[13]。目前,通常采用增加平尾等措施來改善旋翼機的縱向穩定性,但氣動布局的調整對于整個速度包線內旋翼機操穩特性和飛行品質的改善是有限的,而現代飛行控制技術則是提高旋翼機飛行性能和安全性的有效途徑。此 外,復 合 式 旋 翼 機[10-11,13]、無 人 自 轉 旋 翼機[14]的發展也對旋翼機的飛行控制技術提出了更高的要求。
旋翼機是在固定翼飛機的基礎上增加旋翼、去掉機翼等氣動部件發展而來的,但在演變過程中,機翼、平尾、副翼等升降舵等的取消并未開展深入研究。近年來,學術界和工業界基于現代航空技術,開始重新審視機翼、升降舵等對提高旋翼機性能的意義。Tervamaki和Laine[15-16]通過統計與計算分析了平尾對于旋翼機縱向穩定性的重要意義。Matthew等[17-18]通過風洞試驗研究了升降舵對于旋翼機俯仰操縱的輔助作用,其研究表明升降舵有助于旋翼機從低速、大槳盤迎角狀態改出并避免掉高,可以提高低速飛行時旋翼機的安全性。Lopez和Wells[14]提出了一種自轉旋翼/機翼無人機方案,該無人機使用自轉旋翼與升降副翼來實現俯仰和滾轉操縱,但文中只是研究了其飛行動力學特性,并未給出控制律設計及控制分配等的進一步研究。王俊超和李建波[10]給出了一種復合式自轉旋翼機方案,并采用自轉旋翼機的操縱方式進行了飛行動力學分析,但只是考慮了機翼對于旋翼的卸載作用,并未考慮副翼和升降舵對配平和操縱的影響。
本文首先分析了旋翼機采用“方向舵+旋翼周期變距”操縱方式存在的問題,進而提出一種升降舵輔助俯仰操縱的自轉旋翼機布局方案;然后采用解析形式葉素積分建立自轉旋翼模型,基于在線神經網絡動態逆方法設計了自轉旋翼機姿態控制器,基于動態控制分配方法設計了旋翼周期變距-固定翼舵面的控制分配器。最后,通過樣例旋翼無人機的數值仿真對升降舵輔助操縱方式的優勢、本文控制方法的可行性和有效性進行了驗證。
1 常規布局旋翼機操縱方式存在的問題
“方向舵+旋翼周期變距”為目前主流旋翼機的操縱方式[1]。這種方式存在以下問題。
1.1 低速大迎角狀態改出時易掉高問題
低速大迎角飛行時旋翼機的受力狀態如圖1所示,具體可表述為式中:∑Fx、∑Fz分別為旋翼機水平方向和豎直方向受到的合力;Th、Tv為推力Tp的水平與豎直分量;Lf、Df為機身和平尾產生的升力和阻力;Lr、Dr為自轉旋翼拉力的升力與阻力分量;∑My為旋翼機受到的俯仰合力矩。
采用常規操縱方式改出時,由于姿態變化快于速度變化,在空速Vk提高之前,機身升力Lf增加不明顯,而旋翼升力Lr隨著槳盤迎角αs的減小而明顯減小,同時推力的豎直分量Tv減小,導致Tv+Lr+Lf-G<0,飛行高度會明顯下降,如果改出時的初始高度較低,易導致觸地事故。
如果引入升降舵來輔助俯仰操縱,可以在一定程度上實現槳盤氣流迎角和旋翼機迎角α的解耦。低速大迎角狀態改出時,在保持槳盤迎角基本不變的前提下,使用升降舵實現旋翼機的低頭與加速,可以有效減輕或避免改出過程中的掉高問題。
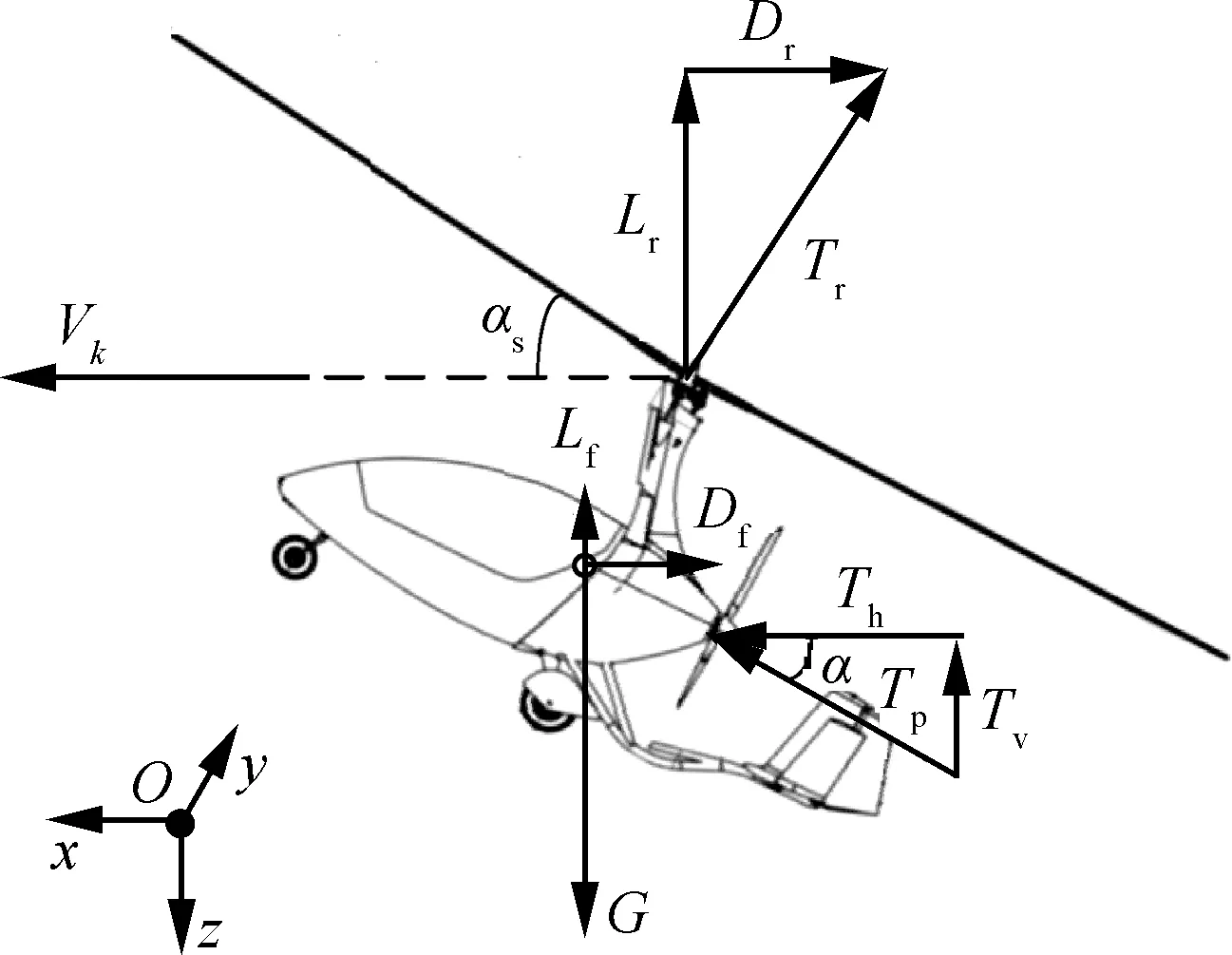
圖1 旋翼機低速大迎角飛行狀態受力分析Fig.1 Force analysis of autogyro at low speed and high angle of attack
1.2 高速時易出現飛行員誘發振蕩問題
自轉旋翼同時作為旋翼機的主要操縱面和升力面,導致了旋翼機操縱與旋翼拉力的耦合。高速飛行時旋翼的槳盤迎角很小,為了實現平穩飛行,旋翼拉力不能發生較大的變化,因而旋翼縱向周期變距的操縱范圍很小。此時,旋翼狀態對于飛行員的操縱非常敏感,低速時正常的操縱量會引起旋翼狀態與旋翼機姿態的劇烈變化,易出現飛行員誘發振蕩(PIO),影響飛行安全[15],其發展過程如圖2所示。
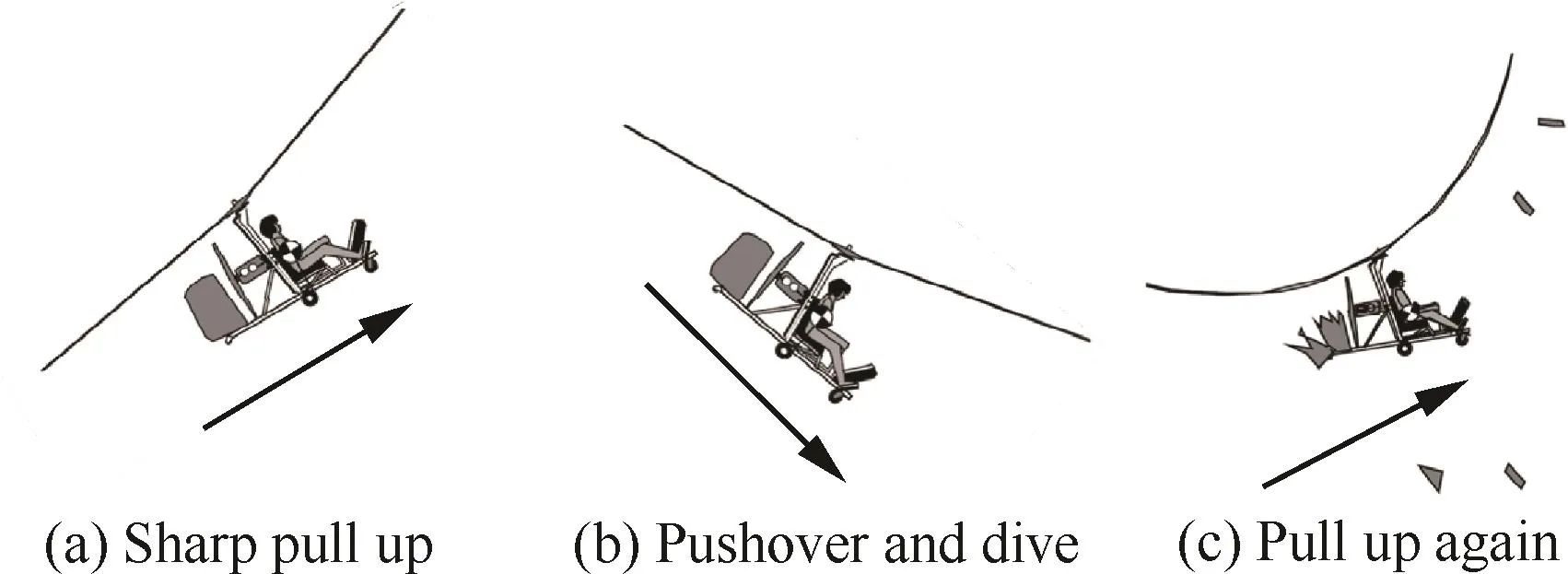
圖2 常規布局旋翼機飛行員誘發振蕩(PIO)示意圖Fig.2 Pilot induced oscilation(PIO)diagram of conventional autogyro
如果采用升降舵輔助俯仰操縱,可以實現高速飛行時更精細、柔和的俯仰控制,避免使用旋翼控制俯仰時,導致大的槳盤氣流和拉力變化,在使用平尾改善俯仰穩定性的基礎上,進一步提高旋翼機的安全性和操縱性。
1.3 復合式旋翼機旋翼卸載后控制效率下降問題
除以上兩點外,對于只采用旋翼操縱方式的復合式旋翼機,還存在旋翼被機翼卸載后旋翼控制效率大幅度下降的問題[19]。
復合式旋翼機為了提高飛行速度,高速時使用較高升阻比的機翼為自轉旋翼卸載,旋翼低速旋轉以保持穩定,只提供小部分升力。但隨著旋翼的卸載,旋翼的控制效率將會大幅下降。例如,CarterCopter復合式旋翼機在旋翼卸載后,其控制效率下降了約50%[19],此時,單純使用旋翼進行操縱將直接導致復合式旋翼機控制性能與機動性的下降。
如果在復合式旋翼機中引入升降舵等固定翼操縱面,高速飛行時,可以在旋翼卸載之后,使用固定翼舵面提供足夠的操縱力矩以實現復合式旋翼機的穩定與控制。
基于以上三點考慮,在常規的旋翼機布局基礎上,本文提出了升降舵輔助操縱的旋翼機布局形式,并研究了該布局形式旋翼機的姿態控制問題。
2 升降舵輔助操縱旋翼機建模
2.1 升降舵輔助操縱旋翼機姿態動力學模型
圖3為本文給出的升降舵輔助操縱旋翼機布局形式。
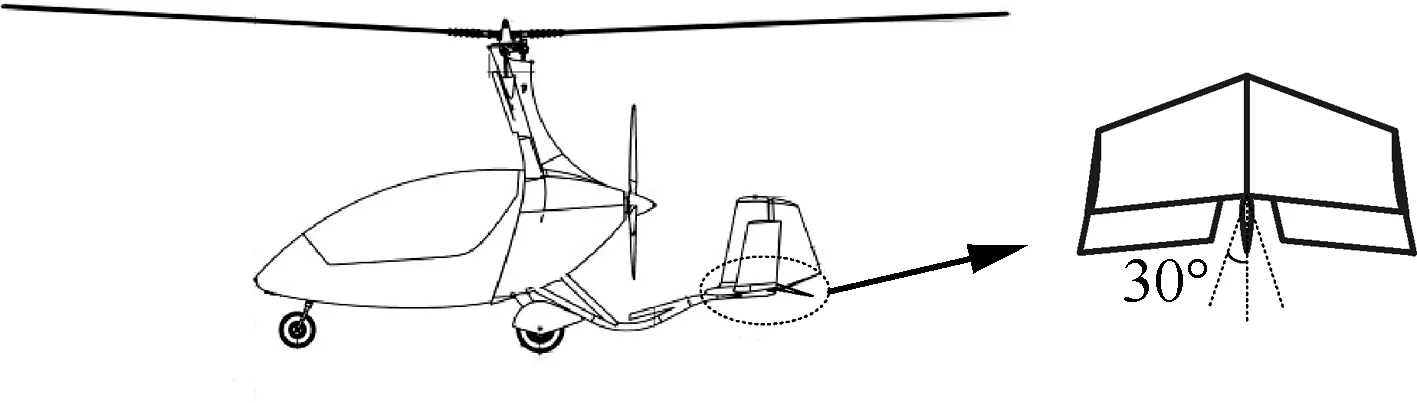
圖3 升降舵輔助操縱的旋翼機布局形式Fig.3 Configuration of autogyro augmented with elevator
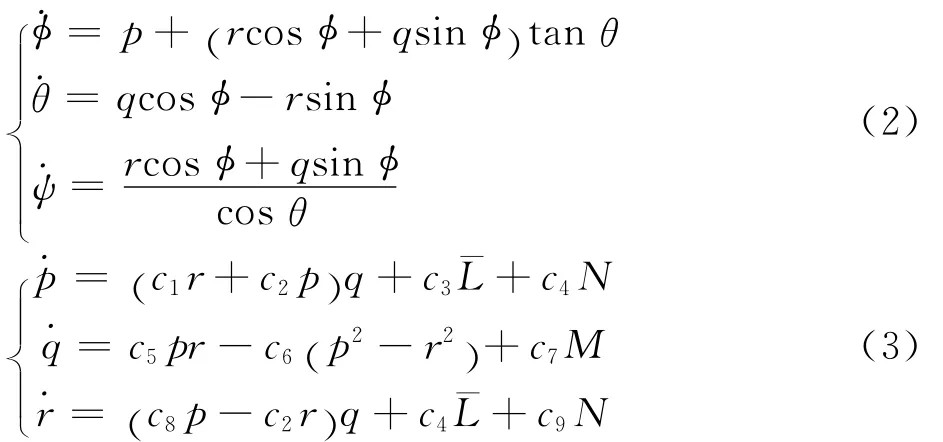
姿態操縱輸入為旋翼周期變距、升降舵、方向舵,其姿態運動模型可表示為
式中:、θ和ψ分別為滾轉角、俯仰角和偏航角;p、q和r分別為滾轉角速率、俯仰角速率和偏航角速率;常數ci的定義可參考文獻[20]、M 和N分別為旋翼機的滾轉力矩、俯仰力矩和偏航力矩,具體可表示為

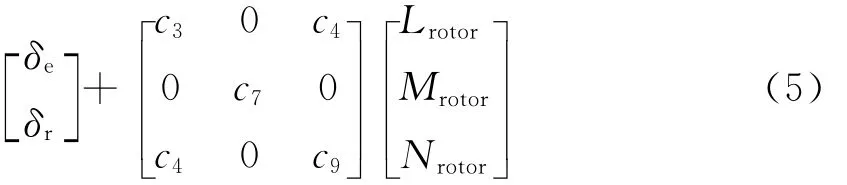
其中:(*)rotor、(*)plane分別為旋翼、固定翼(包含機身、平尾、垂尾、升降舵及方向舵)氣動力矩在機體系的分量。為了更清楚地體現旋翼操縱量與氣動舵面操縱量的作用,將力矩展開可得
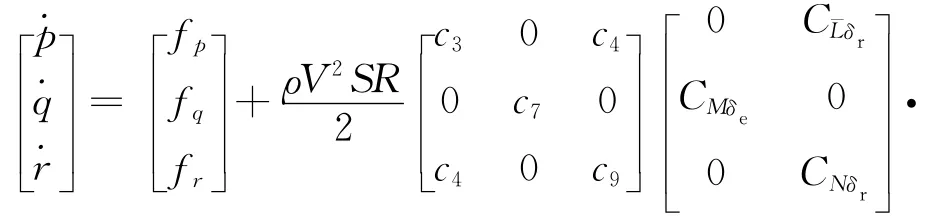
并且有
其中:ρ為大氣密度;V 為空速;S=πR2為參考面積,參考長度R為旋翼半徑;C(*)為氣動導數,α為迎角,β為側滑角為歸一化的迎角變化率;和分別為歸一化的滾轉角速率、俯仰角速率和偏航角速率,具體定義為x珚=xR/(2V)。
對式(2)求導并整理可以得到姿態角的二階導數為
由式(5)和式(8)可得到二階姿態動力學方程為
式中:


2.2 轉速自由度動力學模型
區別于直升機,旋翼機的旋翼不經過發動機驅動,而是通過前方來流驅轉,其轉速會隨飛行狀態和旋翼控制量在一定范圍內變化,并與旋翼機的其他運動模態產生耦合[4],所以旋翼機的姿態模型需要合理考慮旋翼轉速的動態特性。旋翼轉速自由度模型為

式中:Ω為自轉旋翼轉速;QM為自轉旋翼反扭矩;JM為旋翼相對于槳轂中心的轉動慣量。
2.3 基于解析形式葉素積分的自轉旋翼建模
旋翼自轉是旋翼機區別于直升機和固定翼飛機的主要特征,自轉旋翼模型是開展旋翼機研究的基礎。
目前針對自轉旋翼的建模方法主要有以下幾種:系統辨識法[4]、數值葉素積分法[3]、解析形式葉素積分法[8]、插值法[21]和商用軟件法[22]。系統辨識方法只能導出某些操作點或小范圍飛行包線內有效的線性模型;數值葉素積分法所建立的旋翼模型較為準確,適用于對模型精度要求較高的自轉旋翼氣動特性分析,但旋翼六力素為旋翼狀態量和控制量的非線性多重積分,對于控制律的分析與設計而言過于復雜,且存在計算速度緩慢的問題;商用軟件通用性強、使用方便且功能強大,但由于技術封鎖等原因不能獲取。文獻[21]中使用的插值法雖然簡化了建模過程,但插值數據的求取需假設自轉旋翼反扭矩保持為零,故不能反映自轉旋翼的轉速、拉力等動態變化過程,模型精度較差。
本文基于直升機空氣動力學理論[14,23],根據旋翼自轉運動特性,給出解析形式葉素積分自轉旋翼模型,并通過與樣例旋翼風洞試驗數據與數值葉素積分計算結果進行了對比,說明該方法的合理性。
本文采用縱向均勻入流模型。首先,根據動量理論迭代計算誘導速度,得到穩定的誘導速度后,根據式(15)計算自轉旋翼的拉力、后向力和反扭矩:

式中:拉力系數CT、反扭矩系數CQ和側力系數CH的表達式分別為
其中:σ為旋翼實度;a為旋翼翼型的升力線斜率;μ為旋翼前進比;λ為旋翼入流比;θ0為旋翼槳距;CD為旋翼翼型的平均阻力系數。
旋翼的揮舞角可由式(19)和式(20)計算得到

式中:a1s、b1s分別為縱向揮舞角、橫向揮舞角;αTPP為槳尖平面迎角;B1、A1分別為縱向周期變距、橫向周期變距;γb為槳葉洛克數;vi為誘導速度,以上參數的具體定義可參考文獻[23]。
為了驗證本文中自轉旋翼建模方法的有效性,將本文的計算結果與數值葉素積分及風洞試驗結果[8]進行了對比。樣例自轉旋翼參數如表1所示,對比結果如圖4和圖5所示。
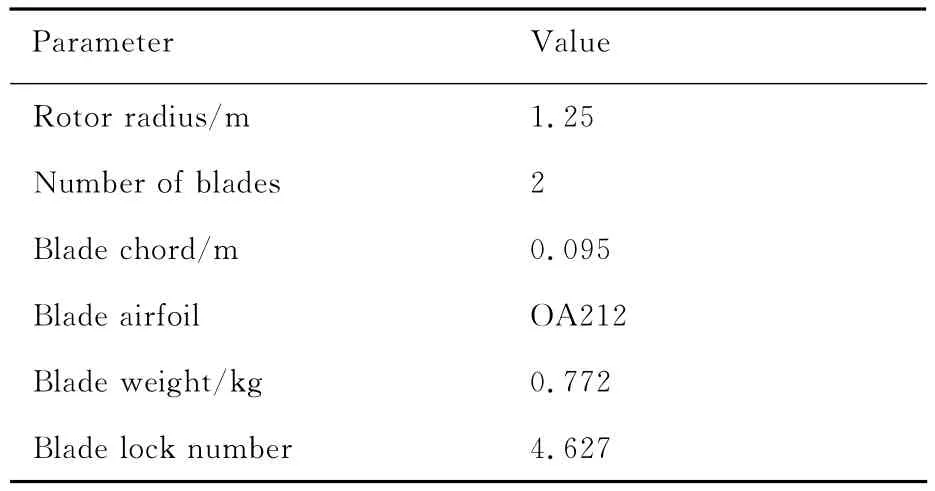
表1 樣例自轉旋翼關鍵參數Table 1 Key parameters of example autorotating rotor
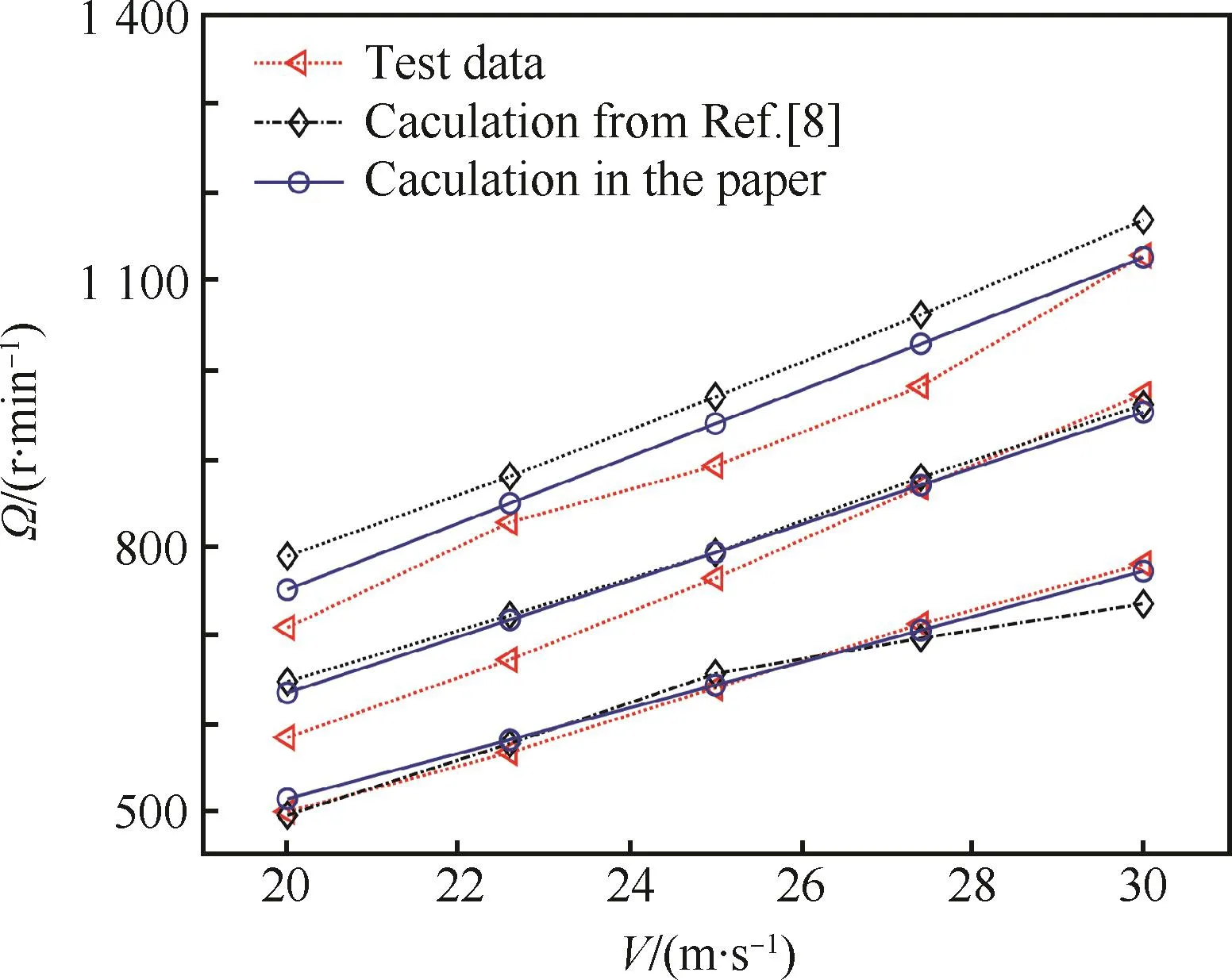
圖4 自轉旋翼穩定轉速與風速關系Fig.4 Stable speed of autorotating rotor versus wind speed

圖5 自轉旋翼升力與風速關系Fig.5 Autorotating lift versus wind speed
試驗與計算中自轉旋翼總距固定為4°,旋翼后倒角分別為2°、4°和6°,空速范圍為20~30m/s。圖4和圖5分別給出了3種方法得到的自轉旋翼的穩定轉速、升力與風速的關系。從圖中可以看出,本文方法的計算結果與文獻[8]中風洞試驗結果及數值葉素積分計算結果吻合程度較高,模型精度能夠滿足控制律分析和設計的需求。
3 控制器設計
根據時標分離原則,將旋翼機姿態控制分解為姿態控制回路和角速率控制回路,分別采用非線性動態逆和線性近似動態逆方法設計姿態回路控制器和角速率回路控制器,并分別設計3個神經網絡補償器,補償俯仰、滾轉和偏航3個通道的逆誤差。
3.1 姿態回路控制器設計

考慮模型誤差,將式(21)表述為

式中:模型誤差定義為

根據飛行品質要求選擇參考模型:

式中:xc= [cθcψc]T為姿態指令;xcm=[cmθcmψcm]T為參考模型輸出指令。
定義偽控制量ν= [ν νθνψ]T,令




則有


此時θ=θcm,即系統的動態響應與期望的指令保持一致,達到期望的飛行品質。
3.2 角速率回路控制器設計
由式(8)可得


結合式(14)~式(20)可以看到自轉旋翼不僅轉速時變,且具有較強的非線性、非仿射特性,因而無法采取常規定轉速直升機的動態逆控制量解算方法[24]。因此,本文在配平點處線性化旋翼機模型,采用近似線性偽逆法設計角速率回路控制器,使用控制分配技術得到偏差控制量,并通過自適應神經網絡補償由設計模型誤差導致的逆誤差。
選擇某一設計點,進行配平和線化[20],角速率的實際動態可表述為

以式(33)為設計模型進行角速率回路的動態逆設計,綜合式(32)、式(33)可得
通過對式(34)左邊項進行控制分配得到相對于配平值的偏差控制量,進而得到實際控制量。
3.3 神經網絡補償器設計
3.3.1 單隱層感知器神經網絡結構
本文采用單隱層感知器神經網絡(SingleHidden-Layer Perceptron Neural Network,SHLNN)設計模型誤差補償器。單隱層感知器神經網絡通過在線調節輸入層與隱層之間的權值與閾值來生成基函數,降低了設計的保守性,被廣泛用于各類飛行控制系統設計中[26],其結構如圖6所示。
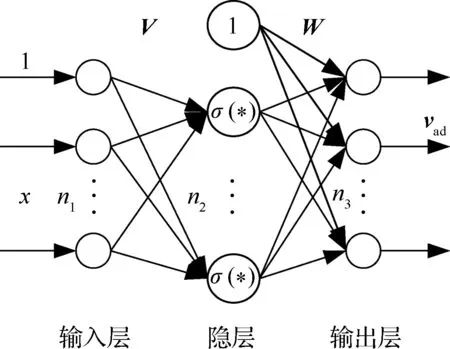
圖6 單隱層感知器神經網絡結構Fig.6 Structure of a single hidden layer neural network
由圖6中可以得到單隱層感知器神經網絡的輸入輸出關系為

式中:n1、n2和n3分別為輸入層、隱層、輸出層神經元個數;θwk、θνj為節點閾值;νij、wjk分別為輸入層到隱層、隱層到輸出層的權值;σ(*)為隱層激勵函數,本文采用非對稱型Sigmoid激勵函數σ(z)= (1 +e-asz)-1,as為激勵系數。
由此可以得到單隱層感知器神經網絡輸入輸出關系的矩陣形式為

3.3.2 神經網絡權值調整律
本文分別設計3個單隱層感知器神經網絡來補償俯仰、滾轉和偏航3個通道的模型誤差,下面以單一通道為例給出補償器的設計,為了表述方便省略通道下標。

由多層感知器神經網絡全局近似定理可知,若給定足夠的輸入信息和隱含層神經元數目,神經網絡能夠以任意精度逼近連續非線性函數。因此,對于連續的不確定非線性逆誤差函數Δ及任意給定的不確定性重構誤差ε,存在有限的隱層神經元個數n2與理想權值W*,V*滿足:

根據式(41)設計該通道神經網絡補償器為其中神經網絡輸入及參數在第5.1節給出。

魯棒自適應項νr的標準值為

式中:
濾波誤差項γ為

式中:P為對稱正定矩陣,滿足李亞普諾夫方程

其中:矩陣Q為任意對稱正定矩陣。
將式(43)~式(45)代入式(42)中可得跟蹤誤差動態為

假設系統的所有指令信號有界,對于式(42)描述的反饋線性化系統,神經網絡補償器為式(41),魯棒自適應項為式(45),可以證明,如果采用式(49)所示的神經網絡權值自適應律[26]
則閉環系統內所有信號保持有界。式(49)中Γw>0,Γv>0為權值調節增益,λ>0為誤差調節增益。
4 控制分配器設計
對于本文提出的升降舵輔助操縱的自轉旋翼機而言,其俯仰通道具有升降舵和旋翼縱向周期變距兩路輸入,二者的特點如下:
1)旋翼縱向周期變距操縱的優點是操縱力矩大,舵效高,適宜用來進行穩態配平,可通過目前旋翼普遍采用旋翼液壓/氣壓配平裝置實現。但由于舵機偏轉需經過旋翼動態變化后才會引起力矩的變化,所以動態響應較常規氣動舵面慢;同時,由第1節的分析可知,由于旋翼既是升力面又是操縱面,頻繁或過量的旋翼操縱會對飛機穩定性產生不良的影響。
2)升降舵的動態響應快于旋翼縱向周期變距,可用來實現高頻的期望力矩;但由于旋翼機布局緊湊,尾撐長度較短且位置較低,升降舵舵效受螺旋槳滑流的增強作用較小,所以升降舵的舵效較旋翼縱向周期變距偏低,不適宜用來配平。
因此,升降舵輔助操縱旋翼機的控制分配設計原則是:主要使用升降舵實現高頻控制;低頻控制主要通過旋翼縱向周期變距實現。
傳統的控制分配策略,如偽逆法、直接分配法和基于最小二次型的最優控制方法等均是建立虛擬控制量到實際控制量的靜態映射,控制分配時只從幅值的角度進行分配,沒有充分考慮操縱機構的帶寬差異,雖然能夠滿足控制的需求,但會造成飛行品質下降等問題。文獻[27]提出一種動態控制分配算法,該算法從頻率角度建立虛擬控制量和實際控制量的動態映射,在不同的頻率域內使用不同的操縱面。
為了協調操縱升降舵和旋翼縱向周期變距,本文采用動態控制分配方法設計旋翼機的控制分配器,其解析解為

式中:ν(t)∈Rk為偽控制量;u(t)∈Rm為期望
s的穩態控制輸入;為加權矩陣。
關于動態控制分配技術的原理與設計方法詳見文獻[27]。
5 數值仿真
為驗證本文所提出的旋翼機輔助操縱方式相對于常規操縱方式的優勢,并驗證設計的自適應姿態跟蹤控制器的性能,根據式(2)~式(20)建立樣例旋翼無人機的非線性模型,并進行姿態控制仿真試驗。
5.1 設計參數
5.1.1 神經網絡補償器設計參數
各通道單隱層神經網絡結構參數如表2所示。
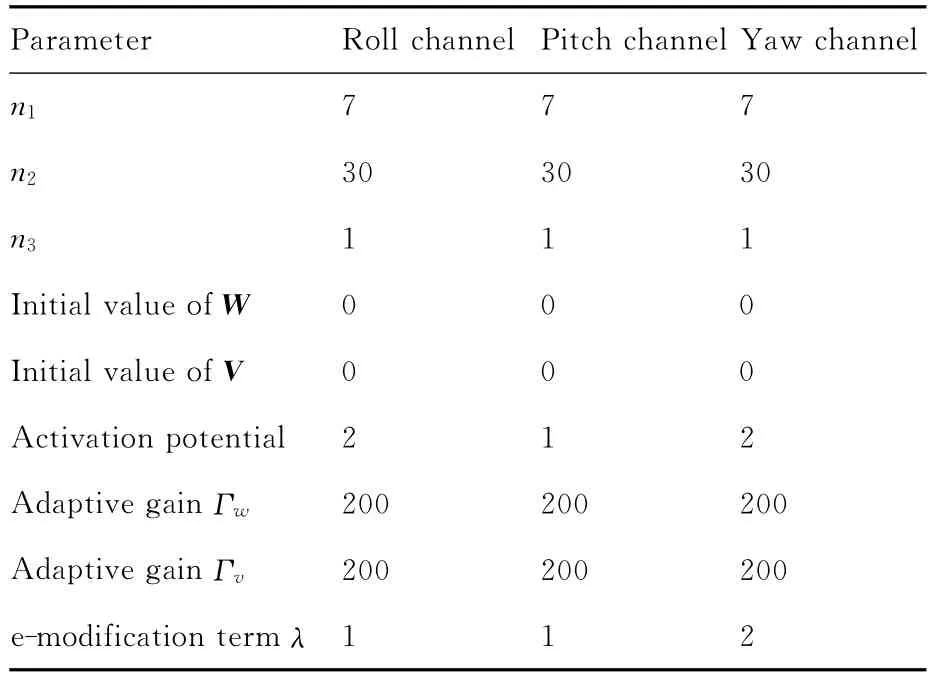
表2 單隱層(SHL)神經網絡設計參數Table 2 Parameters of single hidden-layen (SHL)neural networks
選取各通道的神經網絡輸入為
5.1.2 指令濾波器及線性控制器設計參數
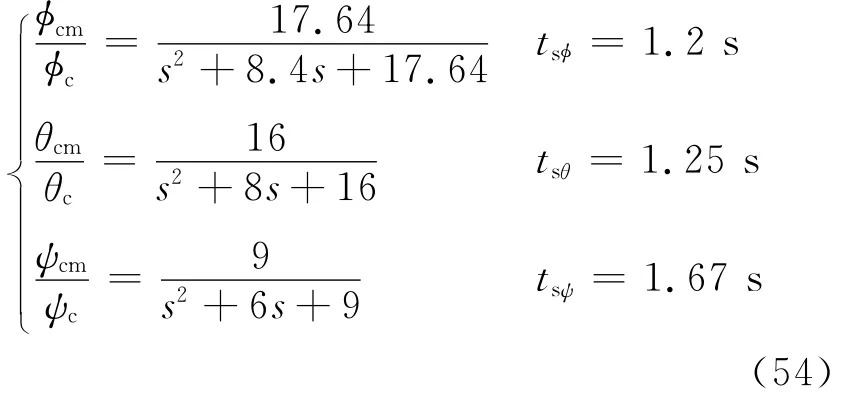
本文中指令濾波器采用二階臨界阻尼指令濾波器。根據期望性能,設計指令濾波器為根據指令濾波器參數確定線性PD控制器的比例系數為KP=diag (8.4,8.0,6.0) ,微分系數為KD=diag (17.64,16.0,9.0) 。
5.1.3 動態控制分配器設計
根據動態控制分配器的設計原則,本文選擇控制分配器權值矩陣如下
us= [A1sB1sδesδrs]T為期望穩態輸入,滿足us=Scav,其中v為偽控制量,Sca為期望穩態分配效率矩陣。為了實現穩態時使用旋翼縱向周期變距進行配平,將控制效率陣中升降舵的舵效置為零,得到如下的期望穩態分配矩陣
根據以上的設計結果,可以得到俯仰通道控制分配器的頻率響應,如圖7所示。
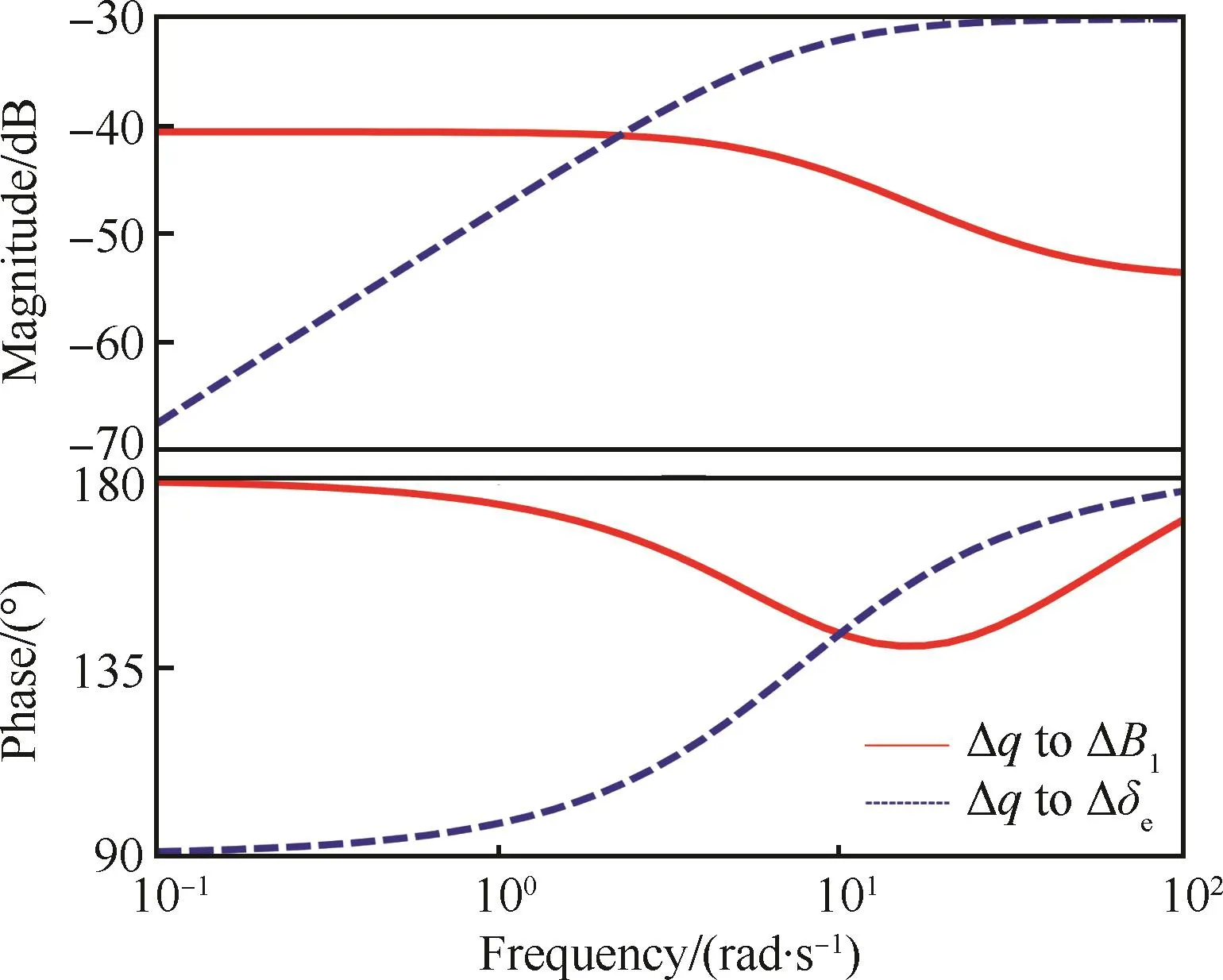
圖7 俯仰通道動態控制分配器頻率響應特性Fig.7 Frequency responses of pitch dynamic control allocator
當期望控制量的頻率低于2.3rad/s時,期望俯仰角速率q到旋翼縱向周期變距ΔB1的幅頻響應更高,此時主要使用旋翼縱向周期變距進行控制與配平;當期望控制量的頻率高于2.3rad/s時,期望俯仰角速率q到升降舵Δδe的幅頻響應更高,此時主要使用升降舵進行較高頻率的控制。可見,本節設計的動態控制分配器可以較好地協調升降舵和旋翼控制量在頻率上的差異。
5.2 仿真驗證
5.2.1 設計點處仿真
選擇巡航速度15m/s,飛行高度200m作為旋翼無人機姿態控制律的設計點,對采用升降舵輔助俯仰操縱前后的旋翼機進行仿真,結果如圖8~圖11所示。
圖8給出了設計點處的姿態跟蹤響應,圖中的CMMD為姿態指令,FCMMD為參考模型輸出的期望指令響應,Without elevator為常規操縱方式的姿態響應,With elevator為升降舵輔助操縱方式的姿態響應。可以看到,本文設計的神經網絡動態逆控制器可以很好地實現兩種操縱方式下三通道姿態的解耦與跟蹤,姿態響應滿足設計的指令濾波器。
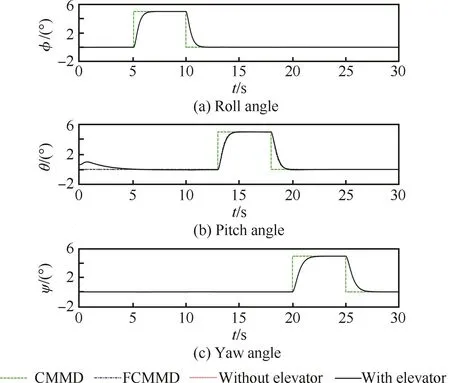
圖8 設計點處姿態跟蹤響應Fig.8 Attitude tracking performance at design point
圖9給出了使用升降舵輔助操縱前后的縱向控制量,圖中的TRIM為設計點的配平控制量。可以看到,本文設計的動態控制分配器可以較好地協調使用旋翼縱向周期變距與升降舵。在t=13s時,俯仰指令由0°階躍為5°,此時,期望俯仰力矩為高頻信號,在控制分配器的作用下,升降舵由0°快速偏轉為-2.5°,在一定程度上降低了旋翼縱向周期變距的偏轉速度;隨著姿態跟蹤誤差的減小,期望俯仰力矩變為低頻信號,升降舵舵偏逐漸衰減為0°,旋翼縱向周期變距起主要作用,這與圖7的分析結果一致。
圖10給出了使用升降舵前后的旋翼轉速和縱向揮舞角的變化,從圖10(a)中可以看到,就本仿真而言,兩種操縱方式并未對轉速產生明顯影響。從圖10(b)中可以清楚地看到,升降舵的使用避免了旋翼縱向周期變距的高頻偏轉,使得旋翼縱向揮舞角的變化更加平緩,有助于提高自轉旋翼的穩定性。
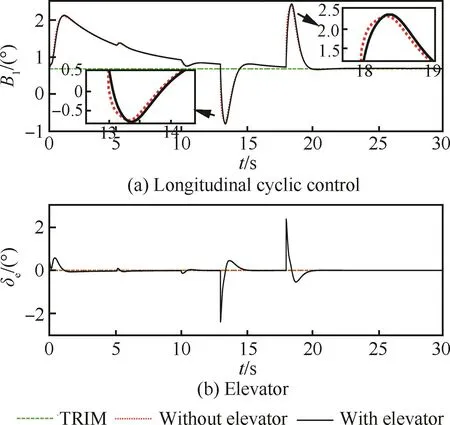
圖9 使用升降舵前后的縱向控制量Fig.9 Longitudinal control deflections in the cases with and without elevator
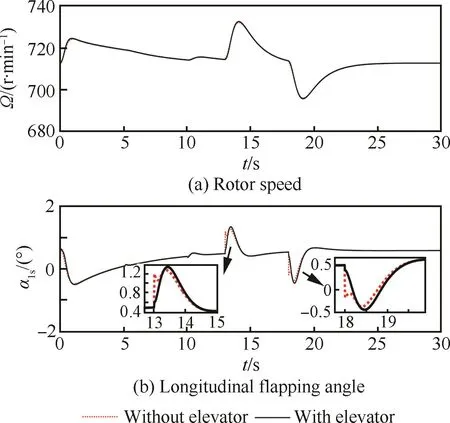
圖10 設計點處自轉旋翼主要狀態量Fig.10 Rotor main states at design point
圖11給出了神經網絡補償器輸出,結合圖8可以看到,對于兩種操縱方式,神經網絡補償器都可以通過在線調整網絡權值,有效地補償模型誤差,實現良好的姿態跟蹤性能;同時,可以看到由于布局形式與操縱方式的差異,升降舵輔助操縱前后的神經網絡的補償過程并不完全相同。
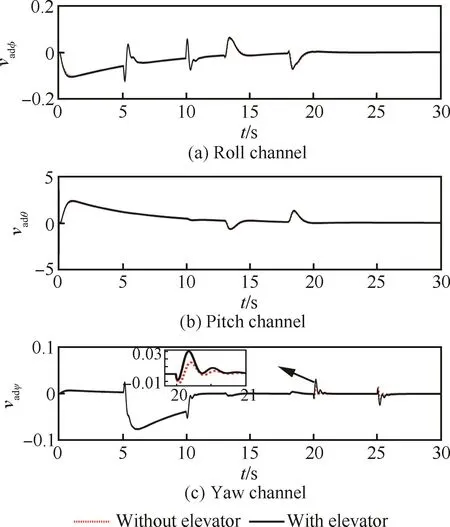
圖11 SHLNN補償器輸出Fig.11 Outputs of SHLNN compensators
5.2.2 魯棒性驗證仿真
為了進一步驗證升降舵輔助操縱方式相對于傳統操縱方式的優勢,并驗證本文控制方法對于模型不確定性和外界干擾的自適應能力,下面以設計點為標稱狀態,考慮一種較惡劣的情況:設定慣性參數和氣動參數不確定性為-30%,同時在t≥20s時加入2m/s的階躍下洗氣流,仿真結果如圖12~圖14所示。
圖12給出了加入模型誤差與風干擾后的姿態跟蹤響應。可以看到,雖然仿真過程中存在較大的模型誤差和較強的風干擾,本文控制器仍能實現兩種操縱方式下良好的姿態解耦和跟蹤。
從圖12(b)可以較圖8更明顯地看到升降舵輔助操縱相對于傳統操縱方式的優勢。在t=20s時,旋翼無人機受到階躍下洗氣流的干擾,由于平尾的存在,兩種操縱方式都出現不同程度的抬頭,對于升降舵輔助操縱方式而言,由于在旋翼無人機受到風干擾、姿態發生較大變化時,可以協調使用旋翼周期變距與升降舵快速響應,所以其控制效率更高,俯仰角的波動要小于常規操縱方式,且俯仰角的穩定速度更快。
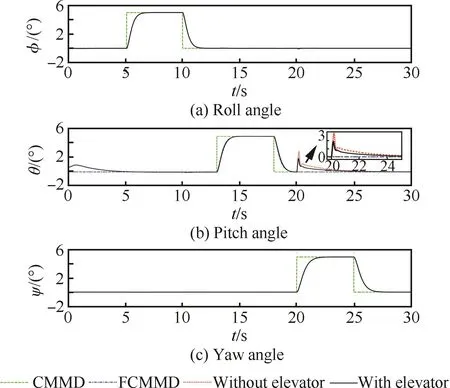
圖12 加入模型誤差與風干擾后的姿態跟蹤響應Fig.12 Attitude tracking performance in the cases with model uncertainties and external disturbances
圖13給出了魯棒性驗證仿真中縱向控制量的對比,可以看到,在存在模型誤差的情況下,升降舵輔助操縱方式較常規操縱方式的優勢更為顯著。無論是在初始時刻的姿態穩定過程中,還是在俯仰指令跟蹤過程中,升降舵的快速輔助操縱有效地避免了縱向周期變距的高頻偏轉。尤其是在旋翼無人機受到階躍下洗氣流時,常規操縱方式的縱向周期變距出現了最大約10°的偏轉,且存在正負波動。而對于升降舵輔助操縱方式而言,動態控制分配器可以有效地協調升降舵和縱向周期變距,通過快速、大幅值的升降舵偏轉,顯著地降低了縱向周期變距的偏轉速度和幅值變化,并避免了縱向周期變距的正負調整,有利于提高旋翼無人機的姿態控制效果。
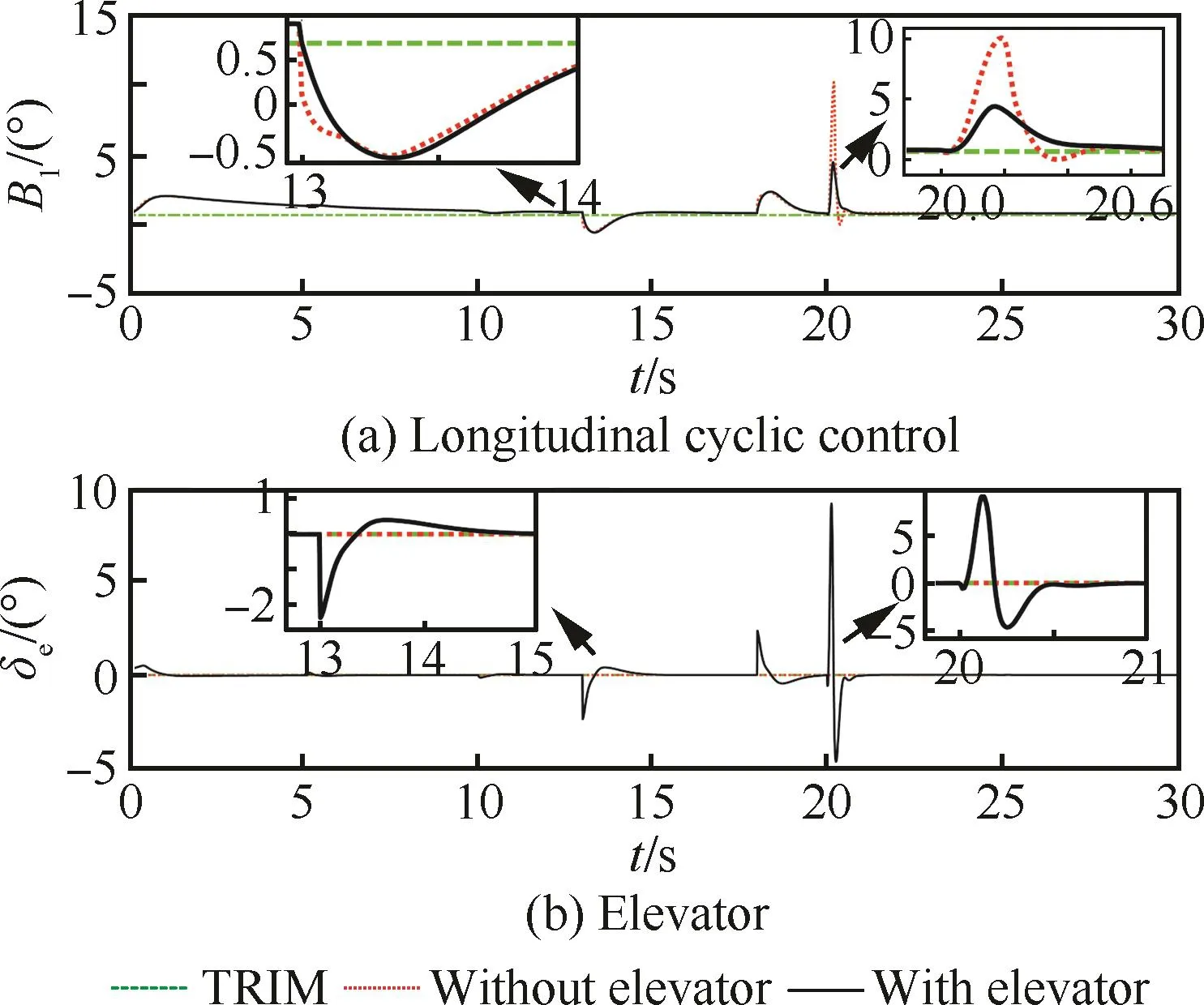
圖13 魯棒性驗證仿真中縱向控制量Fig.13 Longitudinal control deflections in robust validation simulation
圖14給出了魯棒性驗證仿真中旋翼轉速與縱向揮舞角的變化。可以看到,升降舵輔助操縱方式通過協調使用升降舵和縱向周期變距,使得旋翼轉速變化更為平緩,并可有效降低縱向揮舞角的波動幅值,這對于提高旋翼無人機的穩定性和安全性具有較大的意義。
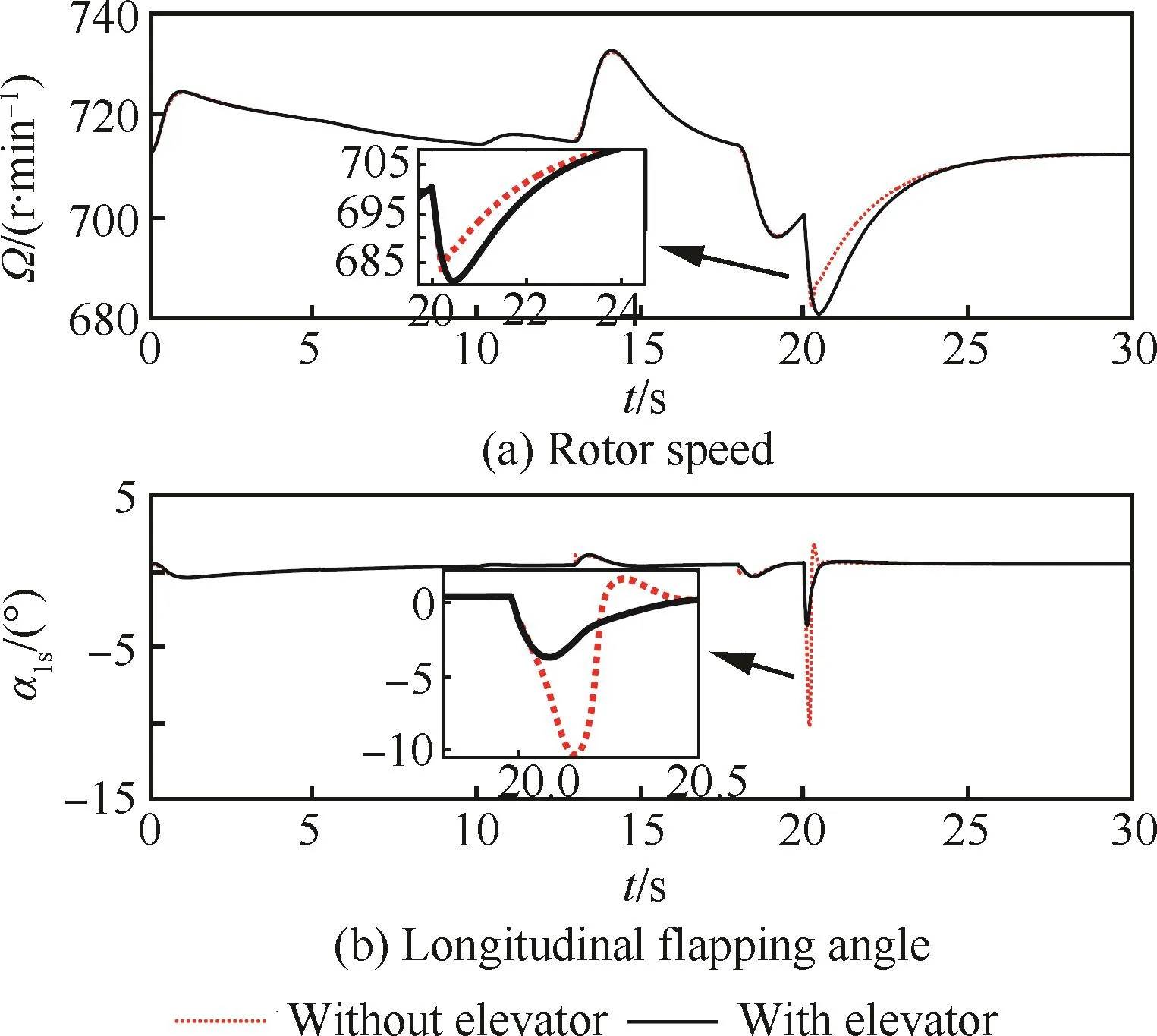
圖14 魯棒性驗證仿真中旋翼主要狀態量Fig.14 Rotor main states in robust validation simulation
6 結 論
1)采用解析葉素積分方法建立的自轉旋翼氣動模型與風洞試驗數據吻合程度較高,基于該方法建立的旋翼機模型可以用于旋翼機特性分析與控制律設計。
2)提出的自適應動態逆姿態控制與動態控制分配方案具有良好的跟蹤能力與自適應能力,對模型不確定性和外界干擾具有較強的魯棒性。
3)對于提出的升降舵輔助操縱旋翼機方案,動態控制分配器可以較好地協調升降舵與縱向周期變距,在一定程度上減輕縱向周期變距的高頻偏轉,抑制縱向揮舞角的高頻變化,有利于提高姿態跟蹤效果與飛行安全。
[1] LEISHMAN J G.Development of the autogiro:A technical perspective[J].Journal of Aircraft,2004,41(4):765-781.
[2] 王煥瑾,高正.自轉旋翼的氣動優勢和穩定轉速[J].航空學報,2001,22(4):337-339.WANG H J,GAO Z.Aerodynamic virtue and steady rotary speed of autorotating rotor[J].Acta Aeronautica et Astronautica Sinica,2001,22(4):337-339(in Chinese).
[3] HOUSTON S S,THOMSON D G.The aerodynamics of gyroplanes:CAA Paper 2009/02[R].West Sussex:Civil Aviation Authority,2010.
[4] HOUSTON S S.Identification of autogyro longitudinal stability and control characteristics[J].Journal of Guidance,Control,and Dynamics,1998,21(3):391-399.
[5] THOMSON D G,HOUSTON S S,SPATHOPOULOS V M.Experiments in autogiro airworthiness for improved handling qualities[J].Journal of the American Helicopter Society,2005,50(4):295-301.
[6] BAGIEV M,THOMSON D G.Handling qualities evaluation of an autogiro against the existing rotorcraft criteria[J].Journal of Aircraft,2009,46(1):168-174.
[7] 崔釗,韓東,李建波,等.加裝格尼襟翼的自轉旋翼氣動特性研究[J].航空學報,2012,33(10):1791-1799.CUI Z,HAN D,LI J B,et al.Study on aerodynamic characteristics of auto-rotating rotors with Gurney flaps[J].Acta Aeronautica et Astronautica Sinica,2012,33(10):1791-1799(in Chinese).
[8] 朱清華.自轉旋翼飛行器總體設計關鍵技術研究[D].南京:南京航空航天大學,2007.ZHU Q H.Research on key technologies of gyroplane preliminary design[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007(in Chinese).
[9] 王俊超,李建波,韓東.自轉旋翼機飛行性能理論建模技術[J].航空學報,2014,35(12):3244-3253.WANG J C,LI J B,HAN D.Theoretical modeling technology for gyroplane flight performance[J].Acta Aeronautica et Astronautica Sinica,2014,35(12):3244-3253(in Chinese).
[10] 王俊超,李建波.自轉旋翼/機翼組合構型飛行器飛行動力學特性[J].南京航空航天大學學報,2011,43(3):399-405.WANG J C,LI J B.Flight dynamics characteristics of autorotating rotor/wing combination aircraft[J].Journal of Nanjing University of Aeronautics and Astronautics,2011,43(3):399-405(in Chinese).
[11] 王俊超,李建波.機翼對自轉旋翼機縱向穩定性的影響[J].航空學報,2014,35(1):151-160.WANG J C,LI J B.Effects of wing on autogyro longitudinal stability[J].Acta Aeronautica et Astronautica Sinica,2014,35(1):151-160(in Chinese).
[12] 陳淼.自轉式無人旋翼機飛行控制技術研究[D].南京:南京航空航天大學,2012.CHEN M.Research on flight control technologies for unmanned gyroplane[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012(in Chinese).
[13] CARTER J.CarterCopter—A high technology gyro-plane[C]/Proceedings of the American Helicopter Society Vertical Lift Aircraft Design Conference.San Francisco:American Helicopter Society,2000:1-9.
[14] LOPEZ C A,WELLS V L.Dynamics and stability of an autorotating rotor/wing unmanned aircraft[J].Journal of Guidance,Control,and Dynamics,2004,27(2):258-270.
[15] TERVAMAKI J.Autogyro safety[EB/OL].(2008-11-05)[2015-09-12].http:/www.tervis.fidisk.fi/JTsite/safety/Gyrosafety.html.
[16] LAINE S.Effect of horizontal tail on the stability of the VPM M16autogyro:Report AALTO-AM-18[R].Otaniemi:Aalto University School of Science and Technology,2010.
[17] MATTHEW J T.Elevators in autogyro propeller wake enable low-speed pitch control[J].Aircraft Engineering and Aerospace Technology,2011,83(3):154-159.
[18] MATTHEW J T,CARTER R G.Pitch control benefits of elevators for autogyros in low-speed forward flight[C]/43rd AIAA Aerospace Sciences Meeting and Exhibit.Reston:AIAA,2005:1-9.
[19] CARTER J.Technical issues relative to high-μ rotor flight(μ>0.6)[EB/OL].(2015-09-08)[2015-09-12].http:/www.cartercopters.com/tech_issues.
[20] STEVENS B L,LEWIS F L.Aircraft control and simulation[M].Hoboken,NJ:John Wiley &Sons,2003:101-138.
[21] WHEATLEY J B.The aerodynamic analysis of the gyroplane rotating-wing system:No.492[R].Washington,D.C.:National Advisory Committee for Aeronautics,1934.
[22] JAMES M R.Stability and control issues associated with lightly loaded rotors autorotating in high advance ratio flight[D].Atlanta:Georgia Institute of Technology,2008.
[23] PROUTY R W.Helicopter performance,stability,and control[M].Boston:PWS Engineering,1986:163-187.
[24] ZHU B,HUO W.Robust nonlinear control for a modelscaled helicopter with parameter uncertainties[J].Nonlinear Dynamics,2013,73(1-2):1139-1154.
[25] LEITNER J,CALISE A R,PRASAD J V.Analysis of adaptive neural networks for helicopter flight control[J].Journal of Guidance,Control,and Dynamics.1997,20(5):972-979.
[26] RYSDYK R,CALISE A.Robust nonlinear adaptive flight control for consistent handling qualities[J].IEEE Transactions on Control Systems Technology,2005,13(6):896-910.
[27] HARKEGARD O.Dynamic control allocation using constrained quadratic programming[J].Journal of Guidance,Control,and Dynamics,2004,27(6):1028-1034.
Adaptive attitude control of autogyro augmented with elevator
LIN Qing1,2,CAI Zhihao1,2,* ,YAN Kun1,2,WANG Yingxun1,2
1.School of Automation Science and Electrical Engineering,Beihang University,Beijing 100083,China 2.Science and Technology on Aircraft Control Laboratory,Beihang University,Beijing 100083,China
To deal with the problems of pitching control mode of conventional autogyro,a novel autogyro configuration augmented with elevator is proposed.The autorotating rotor is modeled with closed-form blade element methods,which is verified by comparing calculation results with data from wind tunnel tests and numerical integration blade element methods.Baseline attitude controller is designed based on dynamic inversion,and adaptive neural networks are used to estimate and eliminate the unknown uncertain inverse error caused by modelling error,external disturbances and design model error.Dynamic control allocation is used to coordinate the control efficiency and bandwidth differences between the elevator and the rotor longitudinal cyclic control.Simulation results show that the proposed autogyro configuration can effectively reduce the deflection frequency and amplitude of the rotor longitudinal cyclic control,the proposed controller has good performance and robustness,and the dynamic control allocator can coordinate the elevator and the rotor longitudinal cyclic control to achieve the desired moments.
autogyro;elevator augmentation;attitude control;dynamic inversion;dynamic control allocation
2015-09-24;Revised:2015-11-13;Accepted:2015-12-14;Published online:2015-12-18 11:00
V249.122
A
1000-6893(2016)09-2820-13
10.7527/S1000-6893.2015.0337
2015-09-24;退修日期:2015-11-13;錄用日期:2015-12-14;網絡出版時間:2015-12-18 11:00
www.cnki.net/kcms/detail/11.1929.V.20151218.1100.002.html
*通訊作者.Tel.:010-82338792 E-mail:czh@buaa.edu.cn
林清,蔡志浩,閆坤,等.升降舵輔助操縱的自轉旋翼機自適應姿態控制[J].航空學報,2016,37(9):28202-832.LIN Q,CAI Z H,YAN K,et al.Adaptive attitude control of autogyro augmented with elevator[J].Acta Aeronautica et Astronautica Sinica,2016,37(9):28202-832.
林清 男,博士研究生。主要研究方向:復合式無人機飛行控制。
Tel:010-82338792
E-mail:linqingbh@163.com
蔡志浩 男,博士,副教授。主要研究方向:無人機自主導航與控制、多機協同與任務規劃、機器視覺。
Tel:010-82338792
E-mail:czh@buaa.edu.cn
閆坤 男,碩士研究生。主要研究方向:復合式無人機飛行控制。
E-mail:1182668247@qq.com
王英勛 男,博士,研究員,博士生導師。主要研究方向:無人機自主控制、無人機系統工程。
Tel:010-82338792
E-mail:wangyx@buaa.edu.cn
URL:www.cnki.net/kcms/detail/11.1929.V.20151218.1100.002.html
*Corresponding author.Tel.:010-82338792 E-mail:czh@buaa.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03