浮子式波浪發(fā)電系統(tǒng)的轉速滑模控制
2016-12-06 09:49:20曲國強方紅偉
電力系統(tǒng)及其自動化學報 2016年11期
孟 鎮(zhèn),梁 浩,白 洋,曲國強,母 銳,方紅偉
(1.國網(wǎng)遼寧省電力有限公司錦州供電公司,錦州 121000;2.天津大學電氣與自動化工程學院,天津 300072)
浮子式波浪發(fā)電系統(tǒng)的轉速滑模控制
孟 鎮(zhèn)1,梁 浩1,白 洋1,曲國強1,母 銳1,方紅偉2
(1.國網(wǎng)遼寧省電力有限公司錦州供電公司,錦州 121000;2.天津大學電氣與自動化工程學院,天津 300072)
針對浮子式波浪發(fā)電系統(tǒng)輸入機械轉矩波動對電機穩(wěn)定運行的影響,以及浮子運動速度(電機轉速)的快速調節(jié)對波浪能跟蹤捕獲的作用,提出一種基于滑模控制方法的機側PWM變換器雙閉環(huán)控制策略。在雙閉環(huán)控制策略中,內環(huán)電流控制器采用PI控制,外環(huán)轉速控制器采用滑模控制,利用滑模控制方法的快速性和魯棒性實現(xiàn)電機轉速的快速穩(wěn)定調節(jié)與跟蹤。仿真結果驗證了所提控制策略的有效性。
波浪發(fā)電;浮子式;轉速控制;滑模控制;PWM變換器
波浪能作為綠色可再生能源的一種,具有無污染、儲量大、分布廣和能源密度大等優(yōu)點。經(jīng)過幾十年的發(fā)展和積累,現(xiàn)有的波浪能發(fā)電技術正在向著大規(guī)模開發(fā)利用和獨立穩(wěn)定發(fā)電的方向發(fā)展[1]。各國學者對波浪發(fā)電技術的研究主要集中于波能轉換裝置的水動力學分析[2]、發(fā)電裝置的優(yōu)化設計[3]以及發(fā)電系統(tǒng)的控制策略研究[4]。對于目前世界上已經(jīng)開發(fā)出的波浪能發(fā)電裝置,按其波能利用方式的不同,可以分為聚波水庫式、振蕩水柱式(空氣式)、鴨式和點吸式(浮子式)等[5]。本文采用的浮子式永磁同步波浪發(fā)電系統(tǒng)屬于點吸式的一種,其原理是利用浮子在波浪作用下的上下運動帶動齒輪旋轉,齒輪通過傳動機構與發(fā)電機相連,從而驅動轉子旋轉產(chǎn)生電能。為使發(fā)電系統(tǒng)符合并網(wǎng)運行條件,發(fā)電機通過全功率PWM變換器同電網(wǎng)相連。該結構具有水下機構少、可移動性強、波能轉換效率高等優(yōu)點,適合用于波浪能的開發(fā)利用。
由微幅波理論和F-K假設法可知,假定入射波浪按正弦規(guī)律運動,那么圓柱形浮子所受的波浪壓力可近似表示為一個與波浪運動相同頻率和相位的正弦函數(shù)[6]。波浪壓力的波動性會使波能轉換裝置輸出的機械轉矩也隨之波動,而電機轉速與機械轉矩、電磁轉矩和系統(tǒng)轉動慣量等因素有關,機械轉矩的劇烈變化將會對電機轉速產(chǎn)生較大影響,如果不加以穩(wěn)定控制會對發(fā)電機的機械強度和使用壽命產(chǎn)生不利影響。此外,同風能類似,波浪能也是隨機變化的不穩(wěn)定能,波高、波形、頻率等特征受到氣象條件的影響而不斷變化[7]。參考風力發(fā)電最大風能捕獲中對風機葉尖速比的調節(jié)[8],浮子式波浪發(fā)電系統(tǒng)中浮子運動速度(電機轉速)的快速調節(jié)對波浪能的最大跟蹤捕獲也具有重要意義。本文采用一種新穎的滑模控制方法作用于機側PWM變換器,對轉速誤差進行快速跟蹤。相較于傳統(tǒng)的PI控制方法,滑模控制更加快速且控制平滑,同時對系統(tǒng)擾動具有更好的魯棒性[9]。
1 浮子式波浪發(fā)電系統(tǒng)原理
本文采用的浮子式永磁同步波浪發(fā)電系統(tǒng)模型如圖1所示,在錨泊系統(tǒng)作用下,浮子隨著波浪運動在豎直方向做單自由度往復運動,通過齒條帶動齒輪和傳動機構轉動,進而驅動永磁同步電機旋轉發(fā)電。其中,雙向棘輪的作用是將在浮子上下運動過程中方向來回變化的齒輪輸出轉矩變?yōu)殡姍C側單一方向的輸入轉矩;而飛輪具有較大的轉動慣量,可輔助減少機械運轉過程中的速度波動。
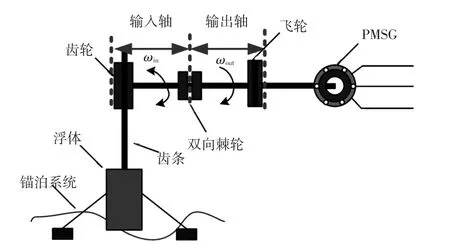
圖1 浮子式波能轉換系統(tǒng)Fig.1 Float-type wave energy conversion system
假定浮子在上下往復運動過程中所受浮力大小變化不大,始終與重力近似相等,在分析浮子運動過程中相互抵消,同時忽略海水的黏滯阻力,那么浮子在豎直方向的受力將只由波浪壓力和齒輪齒條的傳動阻力構成。發(fā)電系統(tǒng)投入運行后,浮子在波浪壓力作用下,速度不斷增加,棘輪輸入軸和輸出軸轉速也不斷增加,并在轉速調節(jié)作用下逐漸穩(wěn)定到目標轉速;當波浪方向發(fā)生變化時,浮子的運動方向不能立即發(fā)生改變,速度在反向波浪壓力的作用下先逐漸減小到零,然后反向加速直到棘輪輸入軸和輸出軸的轉速重新穩(wěn)定到目標速度,如此往復。每當波浪方向發(fā)生變化時,浮子運動速度都要經(jīng)歷先減小再反向上升的過程,在這個過程中發(fā)電機轉速始終穩(wěn)定在目標值,棘輪輸入軸轉速小于輸出軸,故其兩側失去咬合,直到浮子速度增加使得棘輪輸入軸轉速重新達到目標值。此時,因為浮子速度穩(wěn)定不變,所以浮子所受波浪壓力和齒輪齒條的傳動阻力大小相等。假設入射波為規(guī)則的正弦函數(shù)波,那么齒輪齒條的傳動阻力應為截斷的正弦函數(shù),忽略傳動機構能量損耗,發(fā)電機輸入機械轉矩(齒輪齒條傳動阻力)可近似由圖2表示。
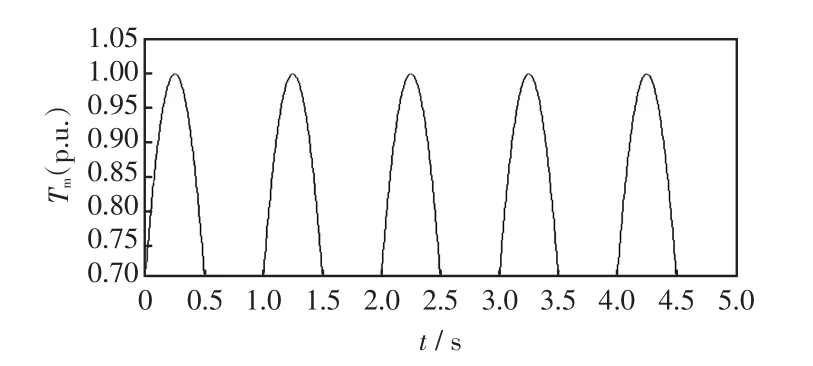
圖2 發(fā)電機輸入轉矩Fig.2 Input torque of generator
直驅型永磁同步發(fā)電機多以低速運行,因此一般采用多極表貼式永磁同步電機。利用轉子磁鏈定向的矢量控制技術,令d軸與轉子磁鏈方向一致,q軸超前d軸90°,可分別得到d、q軸的定子電壓方程和電磁轉矩方程,即
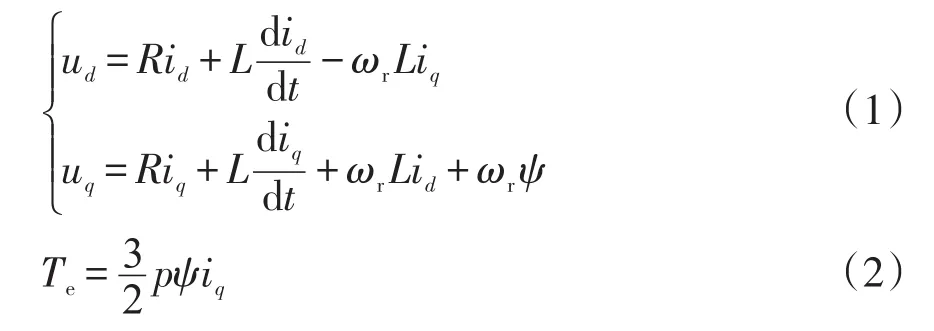
式中:R、L分別為發(fā)電機定子電阻和電感(忽略永磁體凸極效應,L=Ld=Lq);ud、uq和id、iq分別為發(fā)電機定子電壓和電流的d、q軸分量;ωr為發(fā)電機轉子轉速;Te為電磁轉矩;ψ為轉子永磁體磁鏈;p為電機極對數(shù)。
發(fā)電機慣例下,永磁同步電機的運動方程為

式中:Tm為發(fā)電機輸入機械轉矩;J為轉動慣量;B為摩擦系數(shù)。
將式(3)進一步整理可得

2 基于滑模控制的PWM控制器設計
滑模控制本質上是一種非線性控制,其特殊性在于系統(tǒng)的“結構”并不固定,而是在動態(tài)過程中根據(jù)系統(tǒng)當前狀態(tài)有目的地不斷變化,迫使系統(tǒng)按照預定的“滑動模態(tài)”運動[10]。滑動模態(tài)的設計是滑模控制的核心,因其與系統(tǒng)的參數(shù)及擾動無關,所以滑模控制對外部擾動和系統(tǒng)參數(shù)變化具有天然的魯捧性。滑模控制的實現(xiàn)需解決兩個問題,一是滑模面即切換函數(shù)的構造,二是控制律的選擇[11-13]。
針對機側PWM變換器的轉速跟蹤策略,本文所選滑模切換函數(shù)為

式中:er為轉速誤差,er=ωr*-ωr;k為一階動態(tài)時間常數(shù),k越大,系統(tǒng)過渡到穩(wěn)定狀態(tài)所需時間越長。
將式(4)代入式(5)可轉化為

因為參考轉速保持不變,忽略dω*/dt,將式(2)代入式(6),可將原滑模面轉化為

由式(7)可知,滑模控制的控制率可表示為

式中:iq*為控制內環(huán)的q軸電流參考值。
根據(jù)永磁同步電機d、q軸坐標下的電壓方程可知,d、q軸分量間存在相互耦合,因此電流內環(huán)首先需要實現(xiàn)解耦控制,本文采用前饋解耦控制策略。電流調節(jié)器采用PI調節(jié),控制方程為
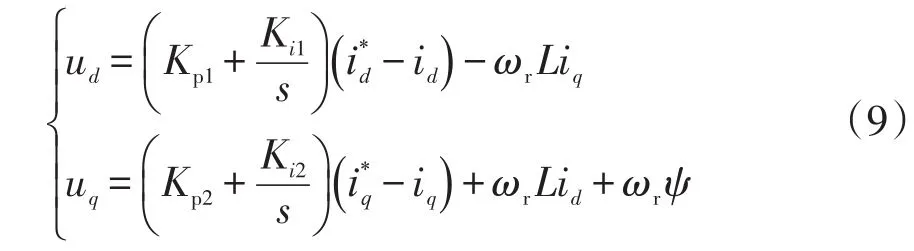
式中:Kp1、Ki1和Kp2、Ki2分別為d、q軸電流環(huán)的比例和積分系數(shù),且均為正。
根據(jù)李亞普諾夫穩(wěn)定性定理,系統(tǒng)滑動模態(tài)的到達條件是李氏函數(shù)V=0.5S2的導數(shù)小于零[14],即

當滑模函數(shù)S>0時,有iq*>iq,滿足滑模條件時需要使dS/dt=-diq/dt<0,即應該要使控制量iq增大。由式(9)可知,iq*>iq時,uq將變大,又由式(1)可知,穩(wěn)態(tài)時,uq變大,iq隨之增大,顯然能夠滿足滑動模態(tài)的達到條件。當S<0時,同理亦然。可見,按以上方法設計的控制器能夠滿足滑動模態(tài)的到達條件。
通過以上分析,可得永磁同步波浪發(fā)電系統(tǒng)機側控制器的控制框圖如圖3所示。
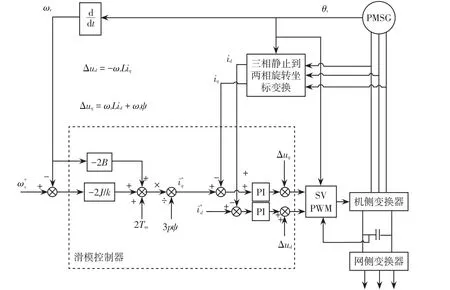
圖3 機側變換器控制框圖Fig.3 Control block diagram of generator-side converter
另外,圖3中的網(wǎng)側控制器采用電網(wǎng)電壓定向的矢量控制技術,將電網(wǎng)電壓定向于d軸,使得電網(wǎng)電壓q軸分量eq=0,從而有功功率P=edid、無功功率Q=ediq,這就實現(xiàn)系統(tǒng)有功功率和無功功率的解耦控制。令iq*=0,可使系統(tǒng)以單位功率因數(shù)運行。
3 仿真實驗及結果分析
為驗證所提波浪發(fā)電系統(tǒng)轉速滑模控制策略的有效性,本文在Matlab中建立了系統(tǒng)仿真模型。其中電機極對數(shù)為24,定子相電阻為0.25 Ω,交直軸電感均為0.835 mH,電網(wǎng)側額定線電壓為380 V,頻率為50 Hz,直流母線電壓為550 V,齒輪半徑為0.5 m。
首先假定入射波浪參數(shù)為波高H=1.2 m,周期T=2 s,選取轉子機械轉速參考值為2.4 rad/s。由圖4可知,不加轉速控制時,發(fā)電機轉速ωm在棘輪處于咬合階段時緩慢上升,而在棘輪兩側失去機械聯(lián)系時,因為發(fā)電機輸入機械轉矩為零而迅速下降。由圖5可知,采用傳統(tǒng)PI控制時,經(jīng)過一段時間轉速可以保持在目標轉速附近波動,但轉速控制并不平滑。由圖6(a)可知,相較于PI控制,滑模控制沒有明顯超調,能使轉速更加快速地穩(wěn)定在目標值,并且控制效果平滑,幾乎沒有波動。考慮實際海域情況下波浪條件隨氣象環(huán)境變化的情況,假定t= 2 s時波高H由1.2 m變?yōu)?.5 m,周期T保持2 s不變。此時相應選取轉子機械轉速參考值為3 rad/s,圖6(b)表明在沒有改變控制參數(shù)的情況下,采用本文所提滑模控制方法可以實現(xiàn)對目標轉速的快速跟蹤。再考慮實際海域情況下入射波浪不可能為嚴格的正弦波,對入射波浪添加30%的隨機擾動,圖6(c)顯示采用滑模控制方法目標轉速的跟蹤效果與正弦波浪時幾乎沒有發(fā)生變化,體現(xiàn)了控制策略的魯棒性。
圖7為直流側母線電壓,雖有微小波動,但保持在2%以內,滿足運行要求。圖8為網(wǎng)側電壓和電流波形圖,可以看出在網(wǎng)側變換器的控制下,網(wǎng)側電壓和電流基本處于同一相位。圖9為系統(tǒng)有功與無功功率波形,由圖可以看出此刻發(fā)電機向電網(wǎng)只輸出有功功率,無功功率為0,實現(xiàn)了系統(tǒng)的單位功率因數(shù)運行。
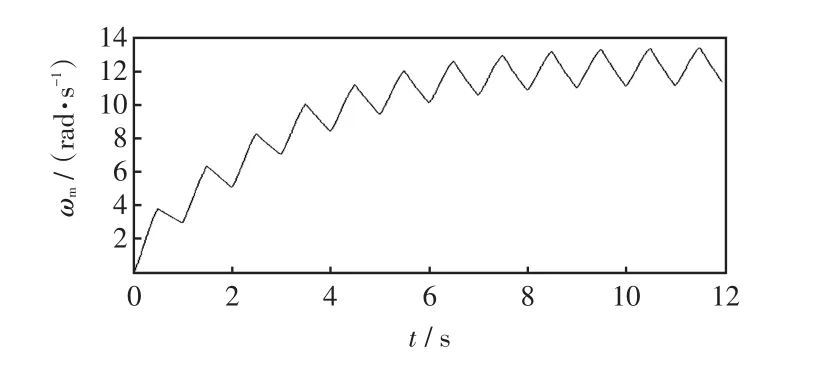
圖4 不加轉速控制時發(fā)電機轉速Fig.4 Generator speed without speed control
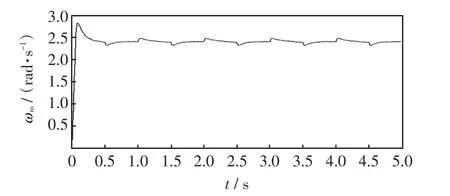
圖5 PI控制時發(fā)電機轉速Fig.5 Generator speed using PI control
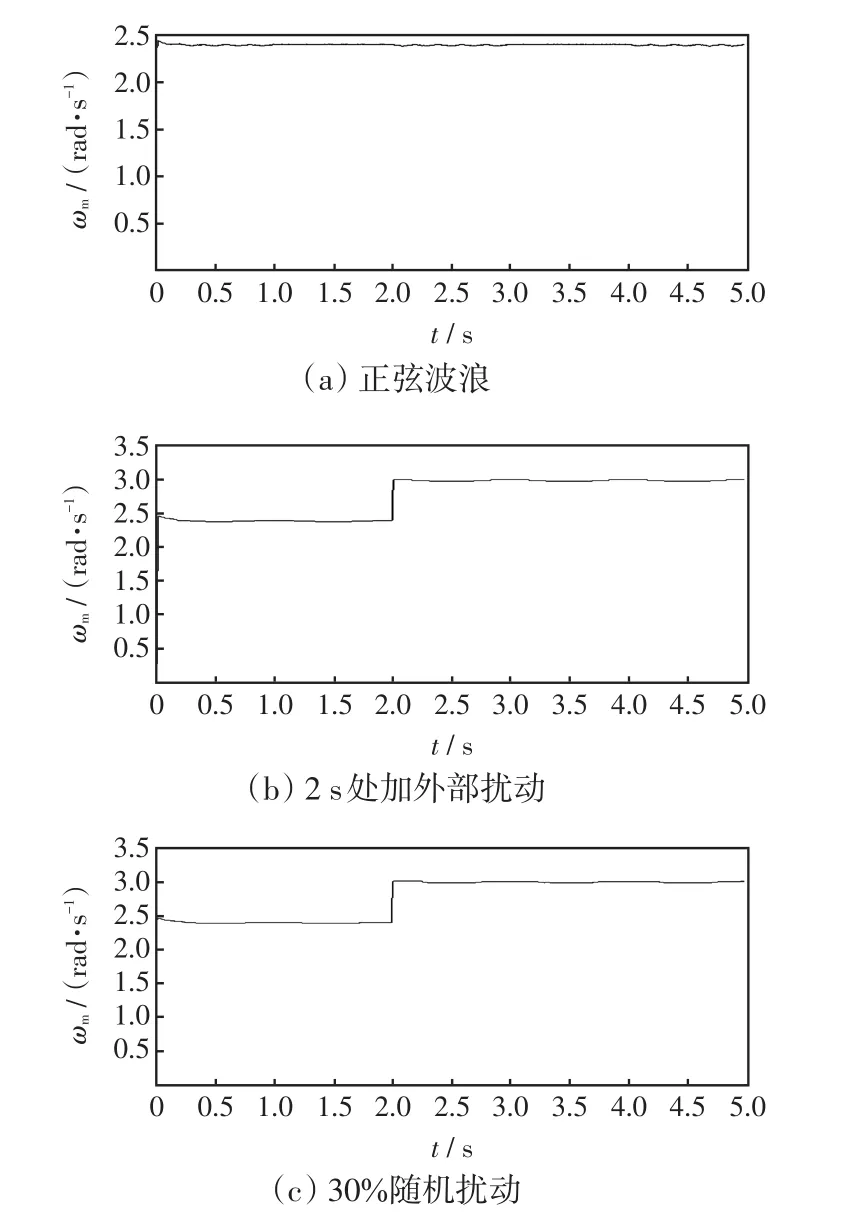
圖6 滑模控制時發(fā)電機轉速Fig.6 Generator speeds using sliding-mode control
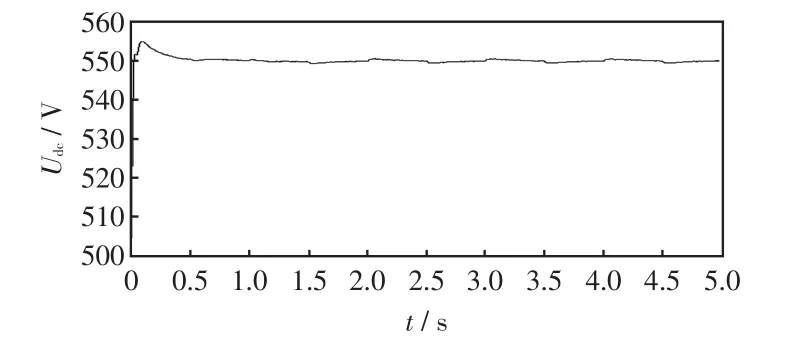
圖7 直流母線電壓Fig.7 DC bus voltage
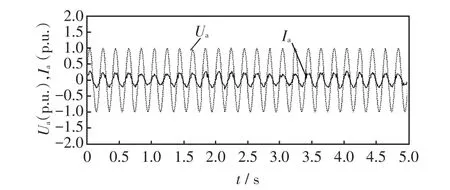
圖8 網(wǎng)側電壓和電流Fig.8 Grid-side voltage and current
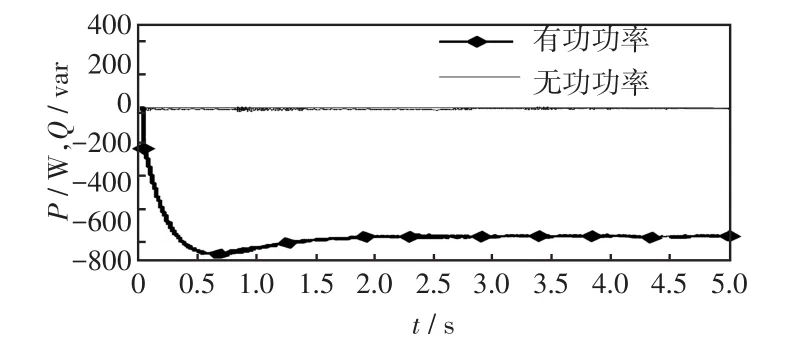
圖9 有功功率與無功功率波形Fig.9 Waveforms of active power and reactive power
4 結語
本文采用PWM變換器作為浮子式永磁同步波浪發(fā)電系統(tǒng)的并網(wǎng)控制器,考慮系統(tǒng)輸入轉矩波動對電機轉速穩(wěn)定性的影響,以及浮子運動速度(電機轉速)的快速調節(jié)對波浪能跟蹤捕獲的作用,提出一種基于滑模控制方法的雙閉環(huán)轉速控制策略,實現(xiàn)了對電機轉速的快速跟蹤控制。仿真結果表明:本文所提控制方法能克服輸入轉矩波動對電機轉速的影響,實現(xiàn)電機轉速的穩(wěn)定調節(jié),同時快速跟蹤波浪條件的變化,調整并跟蹤目標轉速。與PI控制相比,滑模控制無明顯超調,跟蹤迅速,且控制平滑,對外部擾動具有很強的魯棒性,適用于波浪發(fā)電惡劣的運行環(huán)境。此外,結合網(wǎng)側變換器,該發(fā)電系統(tǒng)可同時實現(xiàn)并網(wǎng)有功、無功功率的解耦控制和系統(tǒng)的單位功率因數(shù)運行。
[1]任建莉,鐘英杰,張雪梅,等(Ren Jianli,Zhong Yingjie,Zhang Xuemei,et al).海洋波能發(fā)電的現(xiàn)狀與前景(State of arts and prospects in the power generation from oceanic wave)[J].浙江工業(yè)大學學報(Journal of Zheji?ang University of Technology),2006,34(1):69-73.
[2]盛松偉,游亞戈,馬玉久(Sheng Songwei,You Yage,Ma Yujiu).一種波浪能實驗裝置水動力學分析與優(yōu)化設計(Hydrodynamic analysis and optimal design of a wave energy device)[J].海洋工程(The Ocean Engineering),2006,24(3):107-112.
[3]Drew B,Plummer A R,Sahinkaya M N.A review of wave energy converter technology[J].Proceedings of the Institu?tion of Mechanical Engineers Part A,2009,223(A8):887-902.
[4]方紅偉,程佳佳,劉飄羽,等(Fang Hongwei,Cheng Jia?jia,Liu Piaoyu,et al).浮子式波浪發(fā)電控制策略研究(Control strategies for float type wave energy converter)[J].沈陽大學學報:自然科學版(Journal of Shenyang University:Natural Science),2013,25(1):30-34.
[5]王凌宇(Wang Lingyu).海洋浮子式波浪發(fā)電裝置結構設計及試驗研究(The Structure Design and Experimen?tal Study of An Ocean Buoy Wave Power Device)[D].大連:大連理工大學船舶工程學院(Dalian:School of Na?val Architecture,Dalian University of Technology),2008.
[6]高輝(Gao Hui).振蕩浮子式波浪發(fā)電裝置最佳功率控制研究(Research on Optimal Power Tracking of Oscilla?tion-Buoy Wave Energy Device)[D].廣州:華南理工大學電力學院(Guangzhou:School of Electric Power,South China University of Technology),2012.
[7]鄒濤,劉秀梅,葉風娟(Zou Tao,Liu Xiumei,Ye Fengjuan).天津沿岸海浪特征及分析(Analysis of sea wave characters along coast of Tianjin)[J].海洋預報(Ma?rine Forecasts),2002,19(4):11-16.
[8]付明曉,李守智(Fu Mingxiao,Li Shouzhi).變速恒頻風力發(fā)電系統(tǒng)最大風能追蹤的控制(Maximal wind-ener? gy tracking control of variable-speed constant-frequency wind-power generation system)[J].電力系統(tǒng)及其自動化學報(Proceedings of the CSU-EPSA),2013,25(1):74-78.
[9]Falnes J.Optimum control of oscillation of wave-energy converters[C]//International Offshore and Polar Engineer?ing Conference.Stavanger,Norway,2001:567-574.
[10]劉艷莉,張燁,呂繼考,等(Liu Yanli,Zhang Ye,Lü Jik?ao,et al).PMSM改進型滑模觀測器無傳感器參數(shù)辨識(Sensorless parameters identification of permanent mag?net synchronous motor by employing hyperbolic tangent function)[J].電力系統(tǒng)及其自動化學報(Proceedings of the CSU-EPSA),2014,26(4):30-34.
[11]茅靖峰,吳愛華,吳國慶,等(Mao Jingfeng,Wu Aihua,Wu Guoqing,et al).基于擴張狀態(tài)觀測的永磁直驅風力發(fā)電系統(tǒng)MPPT自適應滑模控制(Adaptive sliding mode MPPT control for PMSG-based wind energy conver?sion systems based on extended state observer)[J].電力系統(tǒng)保護與控制(Power System Protection and Control),2014,42(18):58-65.
[12]常鮮戎,張海生,崔趙俊(Chang Xianrong,Zhang Haish?eng,Cui Zhaojun).基于微分幾何和擴張狀態(tài)觀測器的勵磁控制(Excitation control based on differential geome?try and extended state observer)[J].電力系統(tǒng)及其自動化學報(Proceedings of the CSU-EPSA),2015,27(8):87-91.
[13]殷桂梁,李相男,郭磊,等(Yin Guiliang,Li Xiangnan,Guo Lei,et al).混合儲能系統(tǒng)在風光互補微電網(wǎng)中的應用(Application of hybrid energy storage system on wind/solar hybrid microgrid)[J].電力系統(tǒng)及其自動化學報(Proceedings of the CSU-EPSA),2015,27(1):49-53,59.
[14]Garrido Aitor J,Garrido Izaskun,Amundarain Modesto,et al.Sliding-mode control of wave power generation plants [J].IEEE Trans on Industry Applications,2012,48(6):2372-2381.
Speed Sliding-mode Control for Wave Power Generation System of Float-type
MENG Zhen1,LIANG Hao1,BAI Yang1,QU Guoqiang1,MU Rui1,F(xiàn)ANG Hongwei2
(1.State Grid Jinzhou Electric Power Supply Company,Jinzhou 121000,China;2.School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
Considering the influence of fluctuant mechanical torque on the stability of generator in wave power genera?tion system of float-type,and the positive role of rapid regulation of float velocity(generator speed)in tracking the cap?ture of wave power,a dual closed loop control for generator-side pulse width modulation(PWM)converter is proposed based on sliding-mode control.In this system,proportion-integration(PI)controllers are adopted in the inner loop for current control,and a sliding-mode controller is used in the outer loop for speed control.With its rapidness and robust?ness of the sliding-mode control,the regulation and tracking of generator speed are realized rapidly and stably.Simula?tion results verify the effectiveness of the proposed strategy.
wave power generation;float-type;speed control;sliding-mode control;PWM converter
TM314
A
1003-8930(2016)11-0130-05
10.3969/j.issn.1003-8930.2016.11.022
2015-05-08;
2016-01-14
國家自然科學基金資助項目(51577124);天津市自然科學基金應用基礎與前沿技術研究計劃資助項目(11JCYBJC07900,15JC?ZDJC32100)
孟 鎮(zhèn)(1985—),男,碩士,工程師,研究方向為電力系統(tǒng)。Email:mengzhenziliao@163.com
梁 浩(1976—),男,專科,技師,研究方向為電力系統(tǒng)。Email:149900399@qq.com
白 洋(1978—),男,本科,技師,研究方向為電力系統(tǒng)。Email:348131081@QQ.com
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30