一種高精度快速反應跟蹤雷達伺服系統設計
2016-12-13 08:41:32陳章龍王曉楠
艦船電子對抗 2016年5期
關鍵詞:設計
陳章龍,王曉楠
(中國船舶重工集團公司第723研究所,揚州 225001)
?
一種高精度快速反應跟蹤雷達伺服系統設計
陳章龍,王曉楠
(中國船舶重工集團公司第723研究所,揚州 225001)
對幾種常見的伺服系統進行了簡單對比,對一種高精度快速反應跟蹤雷達伺服系統設計進行了詳細論述,系統具備反應速度快、控制精度高、低速性能好等優點,適用于精密跟蹤雷達的伺服系統。
伺服系統;快速反應;高精度
0 引 言
伺服系統就是位置隨動系統,由伺服機械結構和伺服控制器組成,優良的伺服系統要求有好的跟蹤性能、抗干擾性能、穩態精度、動態過渡過程。
跟蹤雷達伺服系統控制器在收到角誤差信息后,控制跟蹤雷達天線準確地捕獲、跟蹤目標。跟蹤高速運動目標是跟蹤雷達的主要任務,其跟蹤誤差主要表現為動態滯后誤差,需要雷達伺服系統有快速反應能力和高的跟蹤精度[1]。
1 常用伺服系統介紹
伺服系統通常由電機、傳動鏈、位置/速度敏感裝置和配套控制器組成。
傳動鏈的選取方式有減速器和直驅2種。減速器常配合高速電機使用,這種架構設計簡單,便于進行慣量匹配,但是傳動鏈帶來的齒隙和扭轉剛度方面的問題,會造成機械振動,影響伺服系統帶寬和控制精度。直驅方式常配合力矩電機使用,電機與負載直接連接,可以提高機械諧振頻率,降低結構諧振對系統的影響,提高了伺服帶寬、響應速度和控制精度[2]。
2 高精度快速反應伺服系統設計
2.1 系統架構
跟蹤雷達伺服系統性能直接影響雷達的跟隨能力和跟蹤精度,需要伺服系統有快速反應能力和高的跟蹤精度。
力矩電機直驅伺服系統滿足上述要求,采用力矩電機提高控制性能。力矩電機轉矩高,響應速度快,低速性能好,跟蹤精度高。其采用直接驅動方式提高機械諧振頻率,降低結構諧振對系統的影響,提高伺服帶寬、響應速度和跟蹤精度。
2.2 跟蹤雷達伺服系統設計
跟蹤雷達伺服系統設計主要包括伺服系統的靜態設計和動態設計兩部分。
2.2.1 伺服系統靜態設計

執行元件選取力矩電機,同跟蹤雷達天線軸承直接連接的直驅方式。由于負載力矩中各分量的最大值均為瞬時出現,力矩電機峰值力矩即最大堵轉力矩Mp應滿足:Mp≥Mr+Mj+Mf。
力矩電機最大角速度對應的電樞轉矩MdL要求MdL≥ML。
驅動器的選取要與力矩電機及伺服系統線性范圍相匹配,并具備規定的過載能力。
跟蹤雷達伺服系統選用與力矩電機配套的高精度多級旋變作為天線舷角軸、仰角軸的反饋測量傳感器,對天線位置、速度進行測量,伺服控制計算機對旋變信息進行采集,完成對天線的控制。
2.2.2 伺服系統動態設計
伺服系統動態設計主要是對穩定裕量、伺服帶寬、過渡過程品質和跟蹤精度的設計。
穩定裕量設計要求相位裕度γ≥30°,幅值裕度Gm≥6dB。
伺服帶寬βn采用變帶寬設計,在距離較遠時,測量誤差主要是接收機熱噪聲σi引起的,近距離測量誤差主要是伺服系統動態滯后θr引起的,所以伺服帶寬βn根據目標距離R成反比例設計,減小測量誤差,提高隨動精度。
過渡過程品質的設計主要是對過渡過程時間tT和過渡過程超調量σ%的設計,根據伺服帶寬βn和相位裕度γ選取合適的tT和σ%,一般要求σ%<30%。
(1)
式中:Ka為加速度常數;T2為一階微分環節時間常數;T3為慣性環節的時間常數。
系統期望特性如圖1所示。

圖1 系統期望特性圖
圖1中3段分別為低頻、中頻和高頻段。ωc為系統截止頻率,反映了伺服帶寬βn的大小,ω2為第1個轉折頻率,等于1/T2;ω3為第2個轉折頻率,等于1/T3。低頻段決定了加速度誤差Δa,斜率取-40dB/dec;中頻段的設計是期望特性設計的重點,雷達伺服系統為最小相位系統,中頻段斜率取-20dB/dec;高頻段由速度回路閉環特性決定,反應了抑制高頻干擾和機械諧振的能力,斜率取-40dB/dec。
跟蹤雷達伺服系統采用位置環、速度環、電流環三環,完成對雷達天線的舷角和仰角控制。
電流環的作用是去除電動機反電勢影響、減小電樞回路時常數、對結構諧振起到抑制作用。為提高系統魯棒性,電流環帶寬盡量做寬,要求βni≥1kHz。速度環是位置環設計的基礎,作用是提高回路動態特性、提高系統相角裕量和魯棒性。速度環截止頻率要求≥4πβn。位置環實現跟蹤雷達位置隨動,采用方位俯仰式天線座,對伺服方位位置回路誤差進行正割補償[2]。
2.2.3 控制原理
跟蹤雷達伺服系統采用高精度多級旋變作為天線舷角軸、仰角軸的反饋測量傳感器,對位置、速度進行反饋測量,同軸安裝在力矩電機的非負載端。利用多級旋變輸出的精粗碼組合實現天線舷角、仰角位置量和速度量的測量。由伺服控制計算機實時采集相應轉軸的精粗多級旋變輸出反饋,完成閉環控制。
跟蹤雷達伺服系統原理框圖如圖2所示。

圖2 原理框圖
3 伺服系統性能對比
將力矩電機直驅伺服系統過渡過程品質、跟蹤精度與常用的高度電機加傳動鏈伺服系統進行比較,結果如圖3所示。
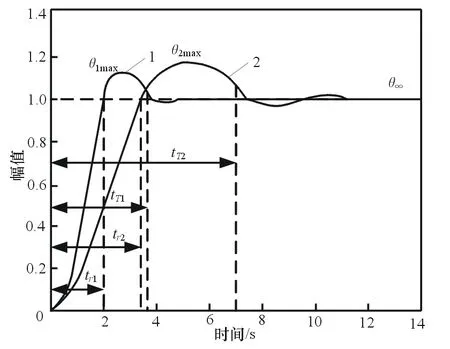
圖3 過渡過程對比圖
圖3中1為力矩電機直驅伺服系統過渡過程,2為高度電機加傳動鏈伺服系統過渡過程。可見前者上升時間tr、過渡過程時間tT、超調量σ%及振蕩次數均小于后者,力矩電機直驅伺服系統具備響應速度快、精度高、低速性能好的優點。
對2種伺服系統跟蹤精度進行錄取后對比如圖4所示。
圖4中系列1為力矩電機直驅伺服系統,系列2為高度電機加傳動鏈伺服系統。可見系列1較系列2在跟蹤精度上有很大提高。
綜上所述,本文設計的力矩電機直驅伺服系統具有反應速度快、跟蹤精度高、低速性能好等優點,特別適用于精密跟蹤雷達的伺服系統。

圖4 跟蹤精度對比圖
[1] 丁鷺飛,耿富錄.雷達原理[M].西安:西安電子科技大學出版社,2002.
[2] 王德純,丁家會,程望東,等.精密跟蹤測量雷達技術[M].北京:電子工業出版社,2007.
DesignofAServoSystemforRapidReactionTrackRadarwithHighAccuracy
CHENZhang-long,WANGXiao-nan
(The723InstituteofCSIC,Yangzhou225001,China)
Thispapercomparesseveralcommonservosystems,discussesaservosystemforrapidreactiontrackradarwithhighaccuracyindetail.Thesystemhasmeritsofrapidreaction,goodcontrolaccuracy,goodperformanceunderconditionoflowvelocity,whichadaptstotheservosystemofexacttrackradar.
servosystem;rapidreaction;highaccuracy
2016-07-21
TN
A
CN32-1413(2016)05-0074-03
10.16426/j.cnki.jcdzdk.2016.05.019
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
