自行式載重車自適應(yīng)懸架組群系統(tǒng)順應(yīng)性
2016-12-13 04:33:57趙靜一康紹鵬范亮貞
中國機(jī)械工程 2016年22期
關(guān)鍵詞:系統(tǒng)
趙靜一 康紹鵬 程 斐 范亮貞
1.燕山大學(xué)河北省重型機(jī)械流體動(dòng)力傳輸與控制重點(diǎn)實(shí)驗(yàn)室,秦皇島,0660042.先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室(燕山大學(xué)),秦皇島,066004
?
自行式載重車自適應(yīng)懸架組群系統(tǒng)順應(yīng)性
趙靜一1,2康紹鵬1,2程 斐1,2范亮貞1,2
1.燕山大學(xué)河北省重型機(jī)械流體動(dòng)力傳輸與控制重點(diǎn)實(shí)驗(yàn)室,秦皇島,0660042.先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室(燕山大學(xué)),秦皇島,066004
對自行式載重車懸架組群系統(tǒng)進(jìn)行了順應(yīng)性描述和順應(yīng)效果評(píng)價(jià),針對目前傳統(tǒng)的液壓彈簧懸架系統(tǒng),設(shè)計(jì)改進(jìn)了一種自適應(yīng)懸架組群系統(tǒng),建立了整車和自適應(yīng)懸架組群系統(tǒng)的非線性數(shù)學(xué)模型;在額定載荷為3200 kN的兩縱列六軸線自行式載重車的基礎(chǔ)上,以隨機(jī)路面激勵(lì)為輸入,在空載和滿載工況下建立了液壓彈簧懸架系統(tǒng)和自適應(yīng)懸架組群系統(tǒng)的仿真模型。仿真分析和現(xiàn)場試驗(yàn)對比結(jié)果表明,改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)在空載和滿載工況下順應(yīng)系數(shù)分別提高了103.8%與55.1%,系統(tǒng)液壓缸輸出力更加平緩,具有更好的順應(yīng)性,采用改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)的自行式載重車在行駛過程中的抗沖擊振動(dòng)能力和改善車輛平順性方面效果顯著。
自行式載重車;自適應(yīng);蓄能器;懸架組群;順應(yīng)性
0 引言
自行式載重車的懸架系統(tǒng)由懸臂、擺臂、車軸、車輪組和液壓缸組成[4],為保證車輛在不同車速、不同負(fù)載和不同路況工況下的安全穩(wěn)定性,所有懸架形成三組或四組獨(dú)立的懸架組群共同承載車輛的負(fù)荷,構(gòu)成三點(diǎn)或四點(diǎn)支撐形式,每組懸架組群由多個(gè)懸架組成,同組懸架組群內(nèi)的液壓缸并聯(lián)連接,能夠根據(jù)路況自動(dòng)調(diào)整伸縮量,保證各輪胎接地比壓相同,避免某一輪胎超載。根據(jù)自行式載重車載重量的不同,載重車的軸線數(shù)會(huì)相應(yīng)增減,懸架組群含有的懸架數(shù)量也會(huì)相應(yīng)改變。傳統(tǒng)懸架系統(tǒng)利用液壓缸預(yù)充油液的壓縮性組成一個(gè)定剛度被動(dòng)式的液壓彈簧懸架,能夠滿足車輛較低車速的行駛要求,但對于空載和滿載負(fù)荷相差較大、速度要求更高的工作場合,傳統(tǒng)定剛度液壓彈簧懸架系統(tǒng)在緩和路面沖擊振動(dòng)、減少顛簸、提高行駛過程中的平順性、改善駕駛員操作舒適性等方面的作用是非常有限的。
本文在不改變自行式載重車原有懸架鋼結(jié)構(gòu)的基礎(chǔ)上,針對懸架組群通過改進(jìn)設(shè)計(jì)了一種新型懸架液壓系統(tǒng),使其可根據(jù)不同載荷實(shí)現(xiàn)剛度自適應(yīng),建立了自適應(yīng)懸架組群系統(tǒng)數(shù)學(xué)模型,對改進(jìn)前后兩種懸架系統(tǒng)的順應(yīng)性進(jìn)行仿真對比分析,對采用改進(jìn)前后兩種懸架系統(tǒng)的自行式載重車進(jìn)行了現(xiàn)場試驗(yàn)。
1 懸架組群系統(tǒng)順應(yīng)性描述及順應(yīng)效果評(píng)價(jià)
1.1 順應(yīng)性描述
懸架組群系統(tǒng)順應(yīng)性是指系統(tǒng)應(yīng)對突變載荷的能力,用給定液壓系統(tǒng)在突變載荷作用下引起的單位壓力相對變化所產(chǎn)生的廣義容積相對變化來表征,是一個(gè)綜合反映懸架組群液壓系統(tǒng)柔性的動(dòng)態(tài)指標(biāo),與液壓系統(tǒng)和元件的結(jié)構(gòu)特征參數(shù)直接相關(guān),其中突變載荷是指能夠使液壓系統(tǒng)工作壓力高于正常值并且導(dǎo)致系統(tǒng)安全閥開啟產(chǎn)生溢流的載荷。根據(jù)定義,順應(yīng)性[5]可表示為
(1)
tc=Δt
懸架組群系統(tǒng)對于突變載荷的順應(yīng)過程是一個(gè)能量轉(zhuǎn)換的過程,當(dāng)突變載荷使液壓系統(tǒng)工作壓力超過基準(zhǔn)壓力后,這一壓力開始做功,促使系統(tǒng)發(fā)生容積改變,將突變載荷產(chǎn)生的瞬間能量釋放出去。圖1為懸架組群系統(tǒng)順應(yīng)性原理示意圖,可知順應(yīng)性C值為兩部分陰影面積之比[6]。
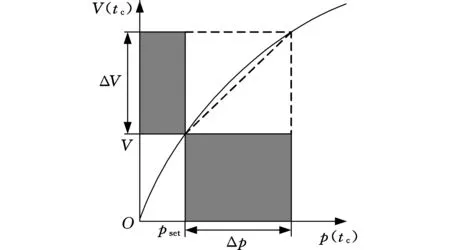
圖1 順應(yīng)性原理示意圖
自行式載重車載荷大、行駛速度快,受到路面激勵(lì)后將產(chǎn)生巨大的慣性沖擊振動(dòng),這些都將直接作用在車輛的懸架系統(tǒng)上,進(jìn)而傳遞到車身,而懸架系統(tǒng)的順應(yīng)性表征為其應(yīng)對慣性沖擊振動(dòng)的能力,是傳遞到平臺(tái)上慣性沖擊振動(dòng)能量的轉(zhuǎn)移或損失。無順應(yīng)的懸架系統(tǒng)理論上承受慣性沖擊對其做的全部功,表現(xiàn)為懸架產(chǎn)生大的加速度和車體的強(qiáng)烈振動(dòng),平順性差。
1.2 順應(yīng)效果評(píng)價(jià)
懸架組群系統(tǒng)的順應(yīng)性可用其對慣性沖擊振動(dòng)能量的傳遞特性和衰減特性來衡量,系統(tǒng)遇到慣性沖擊振動(dòng)后液壓缸開始傳遞力,在傳遞過程中,由于蓄能器氣體體積的改變、油液的壓縮、管路變形等原因,懸架組群系統(tǒng)實(shí)際受到的力要遠(yuǎn)小于慣性沖擊振動(dòng)力。為定量評(píng)價(jià)懸架組群液壓系統(tǒng)對特定工況路況突變載荷的順應(yīng)效果,用其對突變載荷的傳遞特性和衰減特性來衡量,取單位輸入載荷與其對應(yīng)的輸出作對比。假設(shè)慣性沖擊振動(dòng)力為F,懸架組群系統(tǒng)液壓缸的壓力改變?yōu)閜L,其有效作用面積為A,用順應(yīng)系數(shù)來表征懸架組群系統(tǒng)的順應(yīng)效果,其數(shù)學(xué)表達(dá)式為
(2)
同樣的路面激勵(lì)下,對比不同懸架系統(tǒng)順應(yīng)系數(shù)Cs即可反映出該系統(tǒng)應(yīng)對沖擊振動(dòng)的能力,Cs越大表征系統(tǒng)衰減沖擊振動(dòng)的能力越強(qiáng),順應(yīng)性越好;反之,系統(tǒng)較容易傳遞沖擊,順應(yīng)性較差。懸架系統(tǒng)順應(yīng)性越好,車輛平順性效果越顯著。
2 自適應(yīng)懸架組群系統(tǒng)設(shè)計(jì)及數(shù)學(xué)模型的建立
2.1 自適應(yīng)懸架組群結(jié)構(gòu)與工作原理
自行式載重車載質(zhì)量從10 t到2000 t不等,為保證車輛在復(fù)雜工況下高速、穩(wěn)定、安全行駛,由三組或四組獨(dú)立的懸架組群共同承載載貨平臺(tái),各組群內(nèi)包含1~16個(gè)數(shù)量不等的懸架,每個(gè)懸架由鋼結(jié)構(gòu)、車軸、輪胎和液壓控制系統(tǒng)組成,液壓控制系統(tǒng)包括液壓缸、液壓馬達(dá)和相應(yīng)的控制閥組,同組懸架組群內(nèi)各懸架并聯(lián)連接,各液壓缸并聯(lián)聯(lián)通。在偏載或顛簸路面工況下,可以保證組群大系統(tǒng)內(nèi)各液壓缸能自動(dòng)調(diào)整伸縮量,使各輪胎接地比壓相同、各懸架受力均衡,避免由于某一懸架偏載過大,出現(xiàn)鋼結(jié)構(gòu)損壞或爆胎現(xiàn)象等,造成嚴(yán)重事故。
圖2為額定載荷6000 kN的兩縱列十軸線自行式載重車與懸架結(jié)構(gòu)示意圖。當(dāng)車輛為4個(gè)懸架組群支撐形式時(shí),各組群含有5個(gè)懸架,構(gòu)成四點(diǎn)支撐,該形式能夠很好地滿足載重物質(zhì)量大、體積大、結(jié)構(gòu)不規(guī)則和路況差等要求;當(dāng)車輛為3個(gè)懸架組群支撐形式時(shí),其中2個(gè)組群各含有5個(gè)懸架,另一個(gè)組群含有10個(gè)懸架,構(gòu)成三點(diǎn)支撐,該形式適用于載重物結(jié)構(gòu)規(guī)則、路況較好等條件,能夠較容易地實(shí)現(xiàn)載貨平臺(tái)的調(diào)平動(dòng)作。
由于自行式載重車在空載和滿載兩種工況下載荷相差較大,故在不改變其原有懸架鋼結(jié)構(gòu)的基礎(chǔ)上,對懸架組群液壓系統(tǒng)進(jìn)行改進(jìn)設(shè)計(jì),設(shè)置兩個(gè)蓄能器,一個(gè)是低壓蓄能器,另一個(gè)是高壓蓄能器,根據(jù)載重量和路況進(jìn)行氣體預(yù)充,將定剛度的液壓彈簧懸架系統(tǒng)改進(jìn)為具有兩種非線性可變剛度的油氣懸架系統(tǒng)[7],可以實(shí)現(xiàn)車輛在不同載荷和不同路況下懸架組群系統(tǒng)剛度的合理變化,形成自適應(yīng)懸架組群系統(tǒng)。改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)原理如圖3所示。圖3中,M1n為懸架組群中液壓缸的非簧載質(zhì)量;m11,m12,…,m1n為懸架組群中各懸架車軸和輪胎的非簧載質(zhì)量;pL為低壓蓄能器氣體動(dòng)態(tài)壓力;pH為高壓蓄能器氣體動(dòng)態(tài)壓力;z1為懸架組群車軸的位移;z10為某一懸架組群負(fù)載的位移。
在空載工況下,組群系統(tǒng)中只有低壓蓄能器工作;在滿載工況下,組群系統(tǒng)中低壓蓄能器和高壓蓄能器同時(shí)工作,兩級(jí)蓄能器之間自動(dòng)實(shí)現(xiàn)懸架組群剛度的改變,無需額外的調(diào)節(jié)。車輛在兩種工況下懸架組群系統(tǒng)的固有頻率基本保持不變,具有很好的順應(yīng)性,滿足車輛減振緩沖的需求,保證車輛具有較高的平順性。
2.2 自適應(yīng)懸架組群系統(tǒng)設(shè)計(jì)流程
為使自行式載重車在空載和滿載工況下獲得良好的行駛平順性,應(yīng)在設(shè)計(jì)系統(tǒng)剛度時(shí)保證簧載質(zhì)量振動(dòng)的固有頻率基本不變,車輛理想固有頻率范圍為1~1.5 Hz。在液壓缸振動(dòng)幅值范圍內(nèi),要保證兩級(jí)蓄能器最大工作壓力不超過其最高使用壓力35 MPa,最小工作壓力要使液壓缸能夠克服約2 MPa的摩擦力。
在明確設(shè)計(jì)要求與約束條件的前提下,由自行式載重車的整體結(jié)構(gòu)和升降高度的要求確定液壓缸詳細(xì)參數(shù)。根據(jù)車輛在空載與滿載工況下的載荷,可以確定懸架處于靜止平衡狀態(tài)時(shí)低壓蓄能器和高壓蓄能器的氣體壓力pL1、pH1;根據(jù)選定的理想固有頻率分別確定pL0vL0與pH0vH0的積,其中,pL0為低壓蓄能器預(yù)充壓力,vL0為低壓蓄能器預(yù)充體積,pH0為高壓蓄能器預(yù)充壓力,vH0為高壓蓄能器預(yù)充體積;再根據(jù)pL1、pH1確定兩級(jí)蓄能器預(yù)充壓力pL0、pH0的值,進(jìn)而計(jì)算出vL0、vH0的值;最后校核車輛在兩種工況下液壓缸在最大行程范圍內(nèi)兩級(jí)蓄能器的工作壓力是否滿足約束條件,如果不滿足則調(diào)整參數(shù)pL0、pH0,直到滿足約束條件為止。設(shè)計(jì)流程如圖4所示。
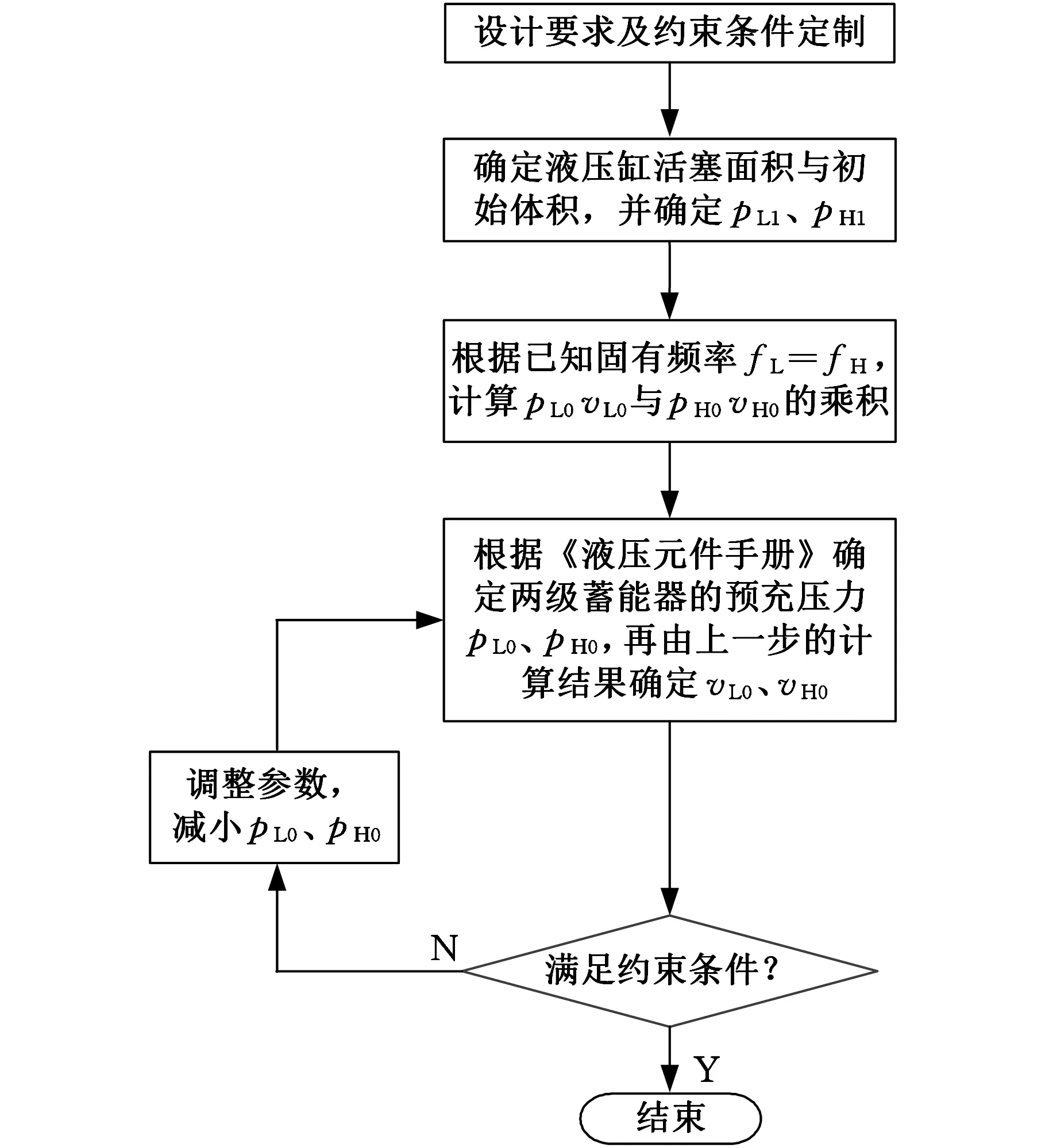
圖4 自適應(yīng)懸架組群系統(tǒng)設(shè)計(jì)流程
2.3 數(shù)學(xué)模型的建立
2.3.1 九自由度車輛振動(dòng)力學(xué)模型
由四組懸架組群支撐載貨平臺(tái)的自行式載重車,懸架與平臺(tái)之間通過帶旋轉(zhuǎn)副的回轉(zhuǎn)支撐連接,在平臺(tái)的前后分別設(shè)置了駕駛室。懸架組群和輪胎都簡化為彈簧阻尼系統(tǒng)[8],經(jīng)過簡化后的九自由度車輛振動(dòng)力學(xué)模型如圖5所示。
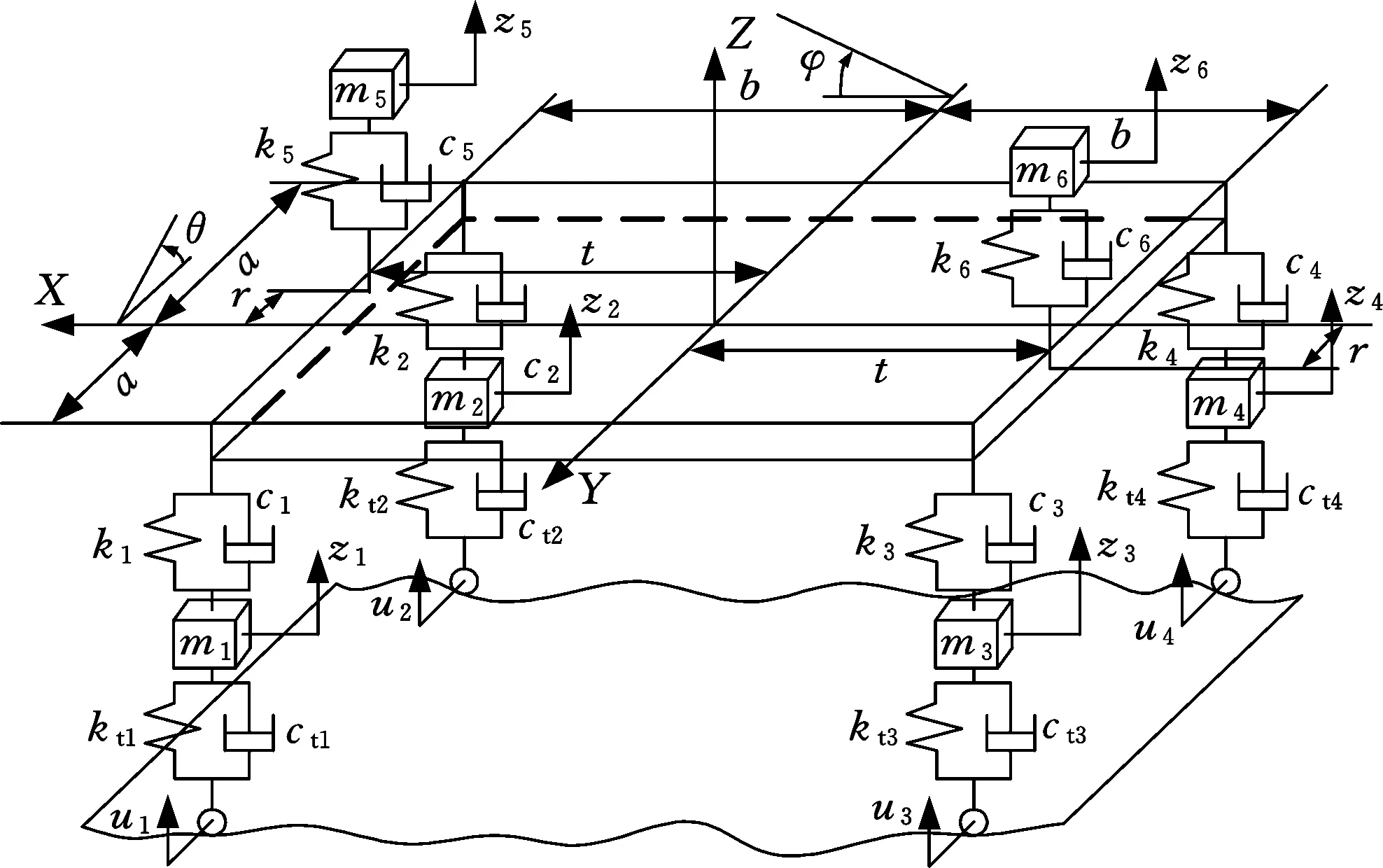
圖5 九自由度車輛振動(dòng)力學(xué)模型
平臺(tái)具有3個(gè)自由度,分別為沿Z軸的垂向振動(dòng),沿X軸的翻轉(zhuǎn)運(yùn)動(dòng)(旋轉(zhuǎn)角為θ),沿Y軸的顛簸運(yùn)動(dòng)(旋轉(zhuǎn)角為φ);z1、z2、z3、z4分別為4個(gè)懸架組群的垂直自由度,z5、z6為車輛前后駕駛室人-椅系統(tǒng)垂直運(yùn)動(dòng)的2個(gè)自由度。車輛整備質(zhì)量為m,m1、m2、m3、m4分別為車輛對稱布置4個(gè)懸架組群擺臂、液壓缸、車軸和輪胎的質(zhì)量,即懸架組群的非簧載質(zhì)量,m5、m6為人-椅系統(tǒng)的質(zhì)量,kt1、kt2、kt3、kt4為4個(gè)懸架組群的等效剛度,ct1、ct2、ct3、ct4為4個(gè)懸架組群的等效阻尼,k1、k2、k3、k4為4個(gè)懸架組群的等效剛度,c1、c2、c3、c4為4個(gè)懸架組群的等效阻尼,k5、k6為人-椅系統(tǒng)的等效剛度,c5、c6為人-椅系統(tǒng)的等效阻尼,u1、u2、u3、u4為4個(gè)懸架組群的隨機(jī)路面激勵(lì)。a、r分別為左右側(cè)懸架與駕駛室距X軸的距離,b、t分別為前后側(cè)懸架與駕駛室距Y軸的距離。可得自行式載重車在4個(gè)懸架組群和路面隨機(jī)激勵(lì)下的耦合振動(dòng)數(shù)學(xué)微分方程:

(3)
M=diag(m,Iθ,Iφ,m1,m2,…,m6)
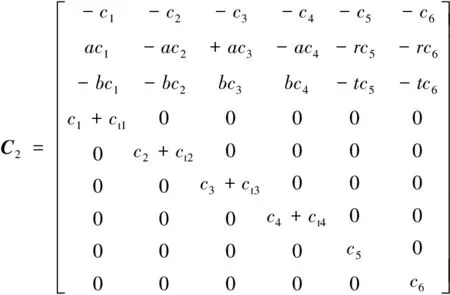
C=[C1C2] K=[K1K2]
z=[z θ φ z1z2… z6]T

式中,Iθ為車輛繞X軸翻轉(zhuǎn)運(yùn)動(dòng)的轉(zhuǎn)動(dòng)慣量;Iφ為車輛繞Y軸顛簸運(yùn)動(dòng)的轉(zhuǎn)動(dòng)慣量;P(t)為路面引起的激振力。
2.3.2 液壓彈簧剛度
自行式載重車傳統(tǒng)液壓彈簧懸架的剛度是指液壓缸無桿腔與液控單向閥形成完全封閉容腔內(nèi)的油液在外負(fù)載的作用下,因油液壓縮所形成的動(dòng)態(tài)彈簧剛度。由于油液彈性模量遠(yuǎn)大于氣體彈性模量,其可壓縮性非常小,故在傳統(tǒng)懸架系統(tǒng)中將液壓彈簧剛度視為一個(gè)較小的定值[9-10]。懸架組群液壓彈簧剛度可表示為
kg=NEA2/v0
(4)
式中,v0為液壓缸無桿腔封閉容腔的初始體積;E為油液彈性模量;A為液壓缸活塞面積;N為每個(gè)懸架組群系統(tǒng)并聯(lián)液壓缸數(shù)量。
2.3.3 兩級(jí)蓄能器空載自適應(yīng)剛度
在空載和滿載工況平衡狀態(tài)時(shí),懸架組群液壓缸無桿腔壓力相差較大。空載工況下低壓蓄能器主要起緩沖減振作用,高壓蓄能器預(yù)充壓力較大,忽略其影響。蓄能器的工作過程經(jīng)過三個(gè)狀態(tài),可分為兩個(gè)工作階段:第一階段是充液平衡過程,蓄能器壓力與懸架組群液壓缸負(fù)載平衡,此階段可認(rèn)為是等溫過程;第二階段是受地面激勵(lì)的沖擊振動(dòng)過程,此過程可認(rèn)為是絕熱過程[11]。
空載工況下,同一懸架組群的多個(gè)懸架同時(shí)向一個(gè)方向運(yùn)動(dòng)時(shí),低壓蓄能器氣體狀態(tài)方程為
(5)
式中,vL1為靜止平衡狀態(tài)時(shí)低壓蓄能器氣體體積;vL為低壓蓄能器氣體動(dòng)態(tài)體積;n為氣體多變指數(shù)。
空載靜平衡時(shí),懸架組群系統(tǒng)蓄能器內(nèi)氣體壓力為
(6)
式中,M10為空載工況下一個(gè)懸架組群簧載質(zhì)量;g為重力加速度。
如圖3所示,根據(jù)管道壓力損失,從懸架組群某一液壓缸無桿腔a處到低壓蓄能器入口b處的壓力關(guān)系式為
(7)
式中,pb為管道b處的壓力,pb=pL;μ為油液動(dòng)力黏度;lab為管路長度;d為管道內(nèi)徑。
聯(lián)立式(5)~式(7)可求得在低壓蓄能器作用下自適應(yīng)懸架組群的非線性數(shù)學(xué)模型,可得液壓缸的瞬時(shí)壓力:
(8)
空載工況下,同一懸架組群的各輪胎向同一方向運(yùn)動(dòng)時(shí),非線性自適應(yīng)剛度方程為
(9)
2.3.4 兩級(jí)蓄能器滿載自適應(yīng)剛度
滿載工況狀態(tài)下,同一懸架組群的多個(gè)懸架同時(shí)向一個(gè)方向運(yùn)動(dòng)時(shí),兩級(jí)蓄能器同時(shí)參與工作,蓄能器氣體狀態(tài)方程可表示為
(10)
式中,vH1為靜止平衡狀態(tài)時(shí)高壓蓄能器體積。
滿載靜平衡時(shí),懸架組群系統(tǒng)兩級(jí)蓄能器內(nèi)氣體壓力為
(11)
式中,M1為滿載工況下一個(gè)懸架組群簧載質(zhì)量。
由流體連續(xù)性方程可知,懸架組群系統(tǒng)兩級(jí)蓄能器內(nèi)氣體體積為
(12)
兩級(jí)蓄能器在工作過程中第二階段的氣體動(dòng)態(tài)狀態(tài)方程為
(13)
式中,vH為高壓蓄能器氣體的動(dòng)態(tài)體積。
聯(lián)立式(10)~式(13)可求得在兩級(jí)蓄能器作用下自適應(yīng)懸架組群的非線性數(shù)學(xué)模型,可得液壓缸的瞬時(shí)壓力:
(14)
滿載工況下,同一懸架組群的各輪胎向同一方向運(yùn)動(dòng)時(shí),非線性自適應(yīng)剛度方程為
(15)
空載與滿載工況下,由非線性自適應(yīng)剛度kL、kH可求得自適應(yīng)懸架組群系統(tǒng)振動(dòng)固有頻率:
(16)
式中,fL為空載工況下一個(gè)懸架組群系統(tǒng)振動(dòng)固有頻率;fH為滿載工況下一個(gè)懸架組群系統(tǒng)振動(dòng)固有頻率。
2.3.5 管道阻尼
在自適應(yīng)懸架組群系統(tǒng)中,兩級(jí)蓄能器作為主要?jiǎng)偠仍B接管路為阻尼元件,決定著系統(tǒng)的阻尼特性[12]。連接管路在壓縮行程的阻尼壓降見式(7)。因此,在管路中形成的阻尼力為
(17)
(18)
3 自適應(yīng)懸架組群系統(tǒng)順應(yīng)性仿真分析
3.1 路面激勵(lì)建模
為了更加真實(shí)地反映路面激勵(lì),采用濾波白噪聲作為分析的路面輸入模型。利用濾波白噪聲法構(gòu)建時(shí)間域的模擬路面具有物理意義清楚、計(jì)算方便的優(yōu)點(diǎn),可直接根據(jù)路面功率譜數(shù)值和行駛車速確定路面模型參數(shù)[13]。路面不平度微分方程為
(19)
式中,Sq(n0)為路面不平度系數(shù),C級(jí)路面的不平度系數(shù)為256×10-6;n0為標(biāo)準(zhǔn)空間頻率,n0=0.1 m-1;w(t)為均值為零的高斯白噪聲;v0為車輛行駛速度;nc為路面空間下截止頻率,nc=0.01 m-1。
車速為30 km/h時(shí),據(jù)式(19)可得路面時(shí)域信號(hào),如圖6所示。
圖6 路面時(shí)域信號(hào)
3.2 與傳統(tǒng)液壓彈簧懸架順應(yīng)性仿真對比
以額定載荷3200 kN的兩縱列六軸線自行式載重車為例,根據(jù)建立的數(shù)學(xué)模型,在Simulink環(huán)境中建立一個(gè)含有3個(gè)懸架的自適應(yīng)懸架組群系統(tǒng)在空載和滿載工況下的振動(dòng)仿真模型,對比傳統(tǒng)液壓彈簧懸架系統(tǒng)和改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)的順應(yīng)性。將C級(jí)路面作為路面激勵(lì)輸入,滿載工況下一個(gè)自適應(yīng)懸架組群系統(tǒng)仿真模型如圖7所示。
圖7 自適應(yīng)懸架組群系統(tǒng)仿真模型
在增益為0.1的階躍信號(hào)激勵(lì)下,空載工況傳統(tǒng)液壓彈簧懸架系統(tǒng)順應(yīng)系數(shù)為1.33×1013,自適應(yīng)懸架組群系統(tǒng)順應(yīng)系數(shù)為2.71×1013,系統(tǒng)順應(yīng)性提高了103.8%;滿載工況傳統(tǒng)液壓彈簧懸架系統(tǒng)順應(yīng)系數(shù)為1.18×1013,自適應(yīng)懸架組群系統(tǒng)順應(yīng)系數(shù)為1.83×1013,系統(tǒng)順應(yīng)性提高了55.1%,說明了改進(jìn)后的自適應(yīng)懸架系統(tǒng)對于衰減和吸收來自路面的沖擊振動(dòng)有非常好的效果。
通過仿真對比分析在空載工況下傳統(tǒng)液壓彈簧懸架系統(tǒng)與自適應(yīng)懸架組群系統(tǒng)的順應(yīng)性,如圖8所示。結(jié)果表明,自行式載重車在30 km/h的車速下行駛時(shí),改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)受路面激勵(lì)產(chǎn)生的慣性沖擊經(jīng)過系統(tǒng)的緩沖與衰減后液壓缸輸出力更加平緩,即平臺(tái)將受到更小的振動(dòng)沖擊,與傳統(tǒng)液壓彈簧懸架系統(tǒng)相比具有更好的順應(yīng)性。同理,對比分析在滿載工況下傳統(tǒng)液壓彈簧懸架系統(tǒng)與自適應(yīng)懸架組群系統(tǒng)的順應(yīng)性,如圖9所示。結(jié)果表明,車輛在15 km/h的車速下行駛時(shí),改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)的順應(yīng)性亦明顯優(yōu)于傳統(tǒng)液壓彈簧懸架系統(tǒng)的順應(yīng)性,車輛行駛過程中具有更好的平順性。
圖8 空載工況兩種懸架順應(yīng)性對比
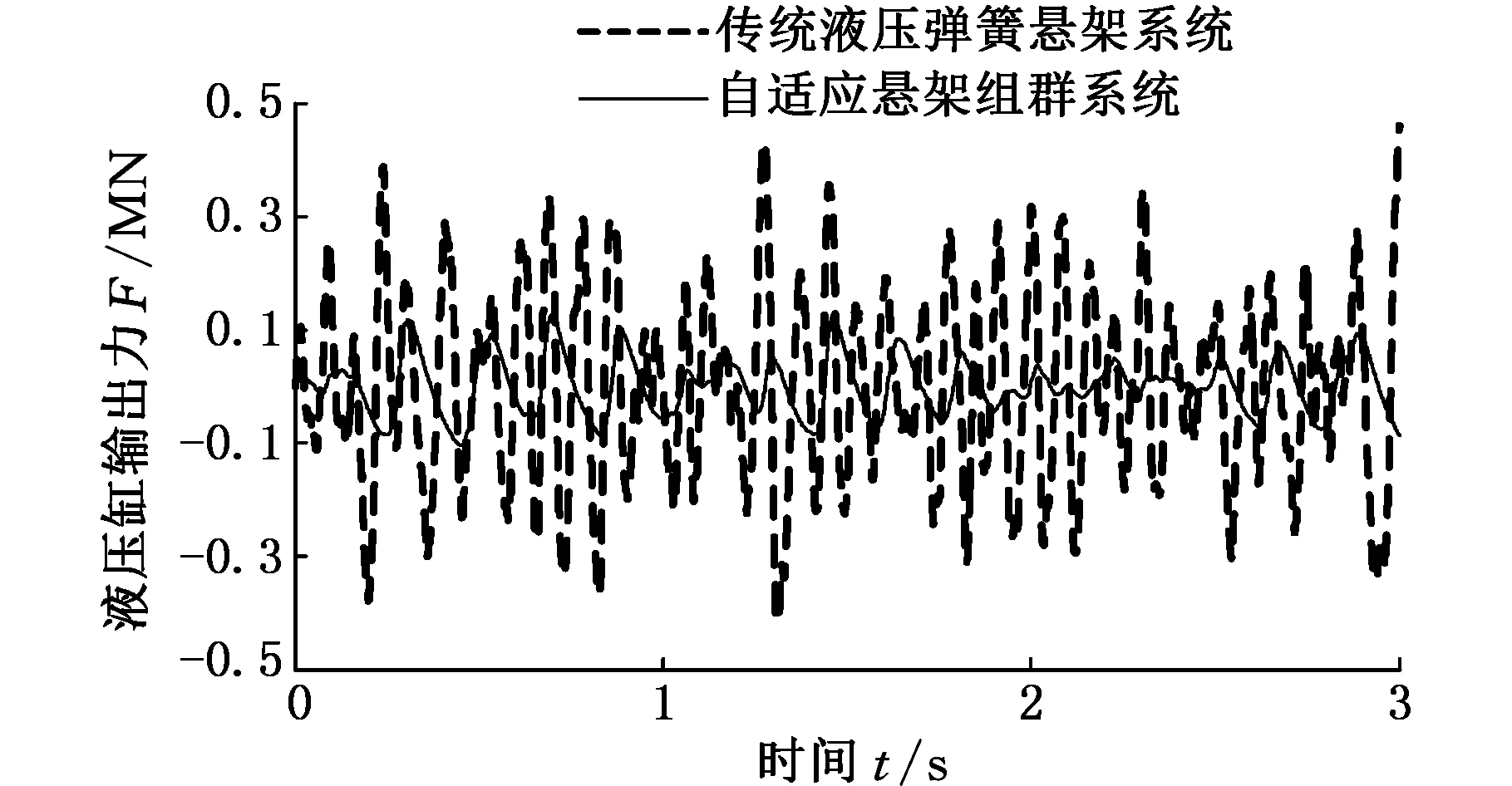
圖9 滿載工況下兩種懸架順應(yīng)性對比
4 試驗(yàn)
某額定載荷為3200 kN的兩縱列六軸線自行式載重車在空載和滿載工況下,對比分析傳統(tǒng)液壓彈簧懸架系統(tǒng)和自適應(yīng)懸架組群系統(tǒng)液壓缸壓力脈動(dòng)情況來反映懸架系統(tǒng)的順應(yīng)特性,圖10所示為滿載試驗(yàn)照片。

圖10 兩縱列六軸線自行式載重車滿載試驗(yàn)
如圖11所示,兩縱列六軸線自行式載重車在空載行駛過程中,對應(yīng)采集兩種懸架系統(tǒng)液壓缸的壓力信號(hào)。在同等路面、相同行駛速度下,通過對比可以明顯看出自適應(yīng)懸架組群系統(tǒng)液壓缸的壓力脈動(dòng)得到顯著改善,更加趨于平緩,與之前的仿真分析一致,同時(shí)脈動(dòng)幅值也明顯降低。
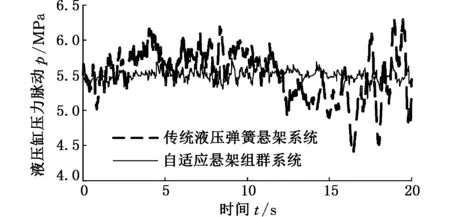
圖11 空載工況下兩種懸架順應(yīng)性試驗(yàn)對比
如圖12所示,在滿載行駛過程中,對應(yīng)采集兩種懸架系統(tǒng)液壓缸的壓力信號(hào)。在相同情況下,自適應(yīng)懸架組群系統(tǒng)液壓缸壓力脈動(dòng)和幅值亦得到顯著改善。充分說明了改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)順應(yīng)性更好,能夠很好地吸收來自路面的沖擊振動(dòng),進(jìn)而改善車輛的行駛平順性。
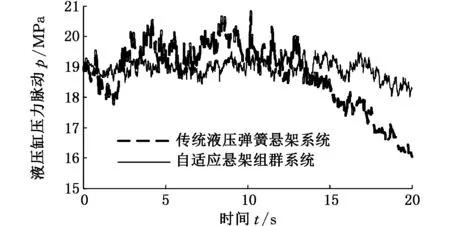
圖12 滿載工況下兩種懸架順應(yīng)性試驗(yàn)對比
5 結(jié)論
(1)本文在不改變自行式載重車傳統(tǒng)懸架鋼結(jié)構(gòu)的基礎(chǔ)上設(shè)計(jì)了自適應(yīng)懸架組群系統(tǒng),通過對兩級(jí)蓄能器參數(shù)的合理匹配,實(shí)現(xiàn)了懸架系統(tǒng)剛度的自動(dòng)調(diào)節(jié),滿足了車輛在空載和滿載工況下懸架簧載質(zhì)量固有頻率的基本一致性,建立了自適應(yīng)懸架組群系統(tǒng)在隨機(jī)路面激勵(lì)下的耦合振動(dòng)數(shù)學(xué)模型。
(2)在階躍信號(hào)作用下,改進(jìn)后的自適應(yīng)懸架組群系統(tǒng)在空載和滿載工況下順應(yīng)系數(shù)分別提高了103.8%與55.1%。在Simulink環(huán)境中仿真分析了一個(gè)含有三個(gè)懸架的自適應(yīng)懸架組群系統(tǒng)在C級(jí)路面的順應(yīng)性,經(jīng)過其對慣性沖擊振動(dòng)緩沖和衰減后,液壓缸輸出力更加平緩,與傳統(tǒng)液壓彈簧懸架系統(tǒng)相比具有更好的順應(yīng)性。
(3)對比現(xiàn)場兩種懸架系統(tǒng)在行駛過程中采集液壓缸壓力的脈動(dòng)情況,與仿真分析結(jié)果一致,充分證明了自適應(yīng)懸架組群系統(tǒng)在提高自行式載重車行駛過程中的抗沖擊振動(dòng)能力、改善車輛平順性和穩(wěn)定性方面效果顯著。
[1] 趙靜一.大型自行式液壓載重車[M].北京:化學(xué)工業(yè)出版社,2010.
[2] 李欣冉,陳無畏,陳曉新.基于剛?cè)狁詈夏P偷膽壹躈VH性能研究[J].中國機(jī)械工程,2014,25(7):978-983.LiXinran,ChenWuwei,ChenXiaoxin.ResearchonVehicleSuspensionNVHPerformanceBasedonFlexible-rigidCouplingModel[J].ChinaMechanicalEngineering,2014,25(7):978-983.
[3]EslaminasabN.DevelopmentofaSemi-activeIntelligentSuspensionSystemforHeavyVehicles[D].Waterloo:UniversityofWaterloo,2008.
[4] 趙靜一,程斐,郭銳,等.自行式載重車懸架升降電液同步驅(qū)動(dòng)控制研究[J].中國機(jī)械工程,2014,25(7):972-978.ZhaoJingyi,ChengFei,GuoRui,etal.ResearchonElectro-hydraulicSynchronizationDrivingControlforSelf-propelledTransporterSuspensionLifting[J].ChinaMechanicalEngineering,2014,25(7):972-978.
[5] 侯典清,龔國芳,施虎,等.盾構(gòu)推進(jìn)系統(tǒng)突變載荷順應(yīng)特性研究[J].浙江大學(xué)學(xué)報(bào)(工學(xué)版),2013,47(3):522-527.HouDianqing,GongGuofang,ShiHu,etal.ComplianceCharacteristicsofPropulsionSystemofShieldTunnelingMachineunderSuddenLoad[J].JournalofZhejiangUniversity(EngineeringScience),2013,47(3):522-527.
[6] 施虎,楊華勇,龔國芳,等.盾構(gòu)推進(jìn)液壓系統(tǒng)載荷順應(yīng)性指標(biāo)和評(píng)價(jià)方法[J].浙江大學(xué)學(xué)報(bào)(工學(xué)版),2013,47(8):1444-1449.ShiHu,YangHuayong,GongGuofang,etal.DefinitionandEvaluationMethodforComplianceofThrustHydraulicSystemforShieldTunnelingMachine[J].JournalofZhejiangUniversity(EngineeringScience),2013,47(8):1444-1449.
[7] 張春輝,趙靜一,田興,等.基于模糊控制的半主動(dòng)油氣懸掛系統(tǒng)在鉸接式自卸車中的應(yīng)用[J].中國機(jī)械工程,2014,25(18):2550-2555.ZhangChunhui,ZhaoJingyi,TianXing,etal.ApplicationsofSemi-activeHydro-pneumaticSuspensionSystemBasedonFuzzyControlinArticulatedDumpTruck[J].ChinaMechanicalEngineering,2014,25(18):2550-2555.
[8]NovikovVV,SmolyanovOV.VibrationalProtectionProvidedbyAutomobileSuspensionswithBothHydraulicandInertial-frictionalShockAbsorbers[J].RussianEngineeringResearch,2009,29(1):68-70.
[9] 葉小華,岑豫皖,趙韓,等.基于液壓彈簧剛度的閥控非對稱缸建模仿真[J].中國機(jī)械工程,2011,22(1):23-27.YeXiaohua,CenYuwan,ZhaoHan,etal.ModelingandSimulationofHydraulicSpringStiffness-basedAsymmetricalCylinderControlledbyValve[J].ChinaMechanicalEngineering,2011,22(1):23-27.
[10] 郭銳,唱榮蕾,趙靜一,等.液壓制動(dòng)系統(tǒng)蓄能器充液特性研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2014,45(7):7-12.GuoRui,ChangRonglei,ZhaoJingyi,etal.ResearchonAccumulatorChargingCharacteristicsofHydraulicBrakeSystem[J].TransactionsoftheChineseSocietyofAgriculturalMachinery,2014,45(7):7-12.
[11] 趙敬凱,古正氣,張沙,等.礦用自卸車油氣懸架力學(xué)特性研究與優(yōu)化[J].機(jī)械工程學(xué)報(bào),2015,51(10):112-118.ZhaoJingkai,GuZhengqi,ZhangSha,etal.ResearchandOptimizationontheMechanicalPropertyofMiningDumpTruck’sHydro-pneumaticSuspension[J].JournalofMechanicalEngineering,2015,51(10):112-118.
[12] 楊健,蘇華山,劉軍輝.液壓懸架系統(tǒng)阻尼特性分析[J].機(jī)床與液壓,2015,43(11):145-147.YangJian,SuHuashan,LiuJunhui.DampingCharacteristicsAnalysisofHydraulicSuspensionSystem[J].MachineTool&Hydraulics,2015,43(11):145-147.
[13] 尹志新,李端芳,唐萌,等.基于MATLAB的時(shí)域路面不平度仿真研究[J].裝備制造技術(shù),2010(4):43-44.YinZhixin,LiDuanfang,TangMeng,etal.AStudyonSimulationofPavementRoughnessBasedonMATLAB[J].EquipmentManufacturingTechnology,2010(4):43-44.
(編輯 陳 勇)
Compliance of Self-adaption Suspension Group Systems in Selfpropelled Transporters
Zhao Jingyi1, 2Kang Shaopeng1, 2Cheng Fei1, 2Fan Liangzhen1, 2
1.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control,Yanshan University,Qinhuangdao,Hebei,066004 2.Key Laboratory of Advanced Forging & Stamping Technology and Science(Yanshan University),Qinhuangdao,Hebei,066004
Through the descriptions and effect evaluations of the compliance of self-adaption suspension group systems in self-propelled transporters, a kind of self-adaption suspension group system was improved and designed in view of the present traditional hydraulic spring suspension system, and a nonlinear mathematical model of the transporter and self-adaption suspension group system was established. Based on the six axis of self-propelled transporter which was loaded 3200 kN, the simulation model of hydraulic spring suspension system and self-adaption suspension group system was built with random road surface excitation for inputs under no-load and full load conditions. Simulation analyses and field tests show that the compliance coefficient of the improved self-adaption suspension group system is increased by 103.8% and 55.1% under no-load and full-load conditions respectively, the output forces of the system hydraulic cylinder are more gentle and the compliance performance of the system is better. The ability to resist shock vibrations and the performance to ride comfort improvements have remarkable effects in the self-propelled transporter driving processes using the improved self-adaption suspension group system.
self-propelled transporter; self-adaption; energy accumulator; suspension group; compliance
2016-01-11
國家自然科學(xué)基金資助項(xiàng)目(51675461;11673040)
U461.4
10.3969/j.issn.1004-132X.2016.22.021
趙靜一,男,1957年生。燕山大學(xué)機(jī)械工程學(xué)院教授、博士研究生導(dǎo)師。主要研究方向?yàn)樾滦鸵簤合到y(tǒng)開發(fā)和機(jī)電設(shè)備控制。出版專著9部,發(fā)表論文200余篇。康紹鵬,男,1986年生。燕山大學(xué)機(jī)械工程學(xué)院博士研究生。程 斐,男,1983年生。燕山大學(xué)機(jī)械工程學(xué)院博士研究生。范亮貞,男,1990年生。燕山大學(xué)機(jī)械工程學(xué)院碩士研究生。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
