無畏險阻跨出新路
2016-12-13 15:57:04熊偉
兵器知識 2016年12期
熊偉
“跨越險阻2016”挑戰賽的E組比賽,要點有兩個。一,山地輸送。要爬非常陡峭的山坡,跨越多重高墻、壕溝,其路況即便是我們人走起來,都會覺得難。二,非仿生。平臺不像狗、蟲等動物,用“腿”行走、過障,還是依靠看似傳統的輪胎、履帶。因此各參賽隊的重點就是如何創新設計出新穎獨特的輪、履結構,車體樣式。大多數參賽隊選擇了搖臂輪式結構,通過擺臂抬起車輪,從而實現爬墻過障。還有前后車體鉸接,通過彎折車體,來兼顧過障、轉彎的機動需求。
陸軍軍官學院的“無畏者”無人車,結構很新穎,像履像輪又像鉸接。它的行走原理,簡便地實現了快速越障,給大家留下深刻印象。預賽時該車出現意外,沒能進入決賽。但在北京進行決賽時,車隊作為唯一被邀請參加展示環節的非決賽隊伍,來到了北京。這是為什么呢?記者為此采訪了該車隊的隊長,陸軍軍官學院的陳向春老師。

陸軍軍官學院,是一所承擔陸軍指揮生長軍官“學歷教育合訓”任務的院校,學院的前身是1978年成立的炮兵技術學院,由鄧小平同志親自選址合肥,2011年6月改建為陸軍軍官學院。學院結合了工程院校、指揮院校和綜合院校的辦學實踐,在教育理念、基礎教育、科研學術、人才復合素質等方面具有特色和優勢。對于受邀參加決賽的展示環節,陳向春老師介紹說這得益于在預賽前后,“無畏者”的優秀表現。
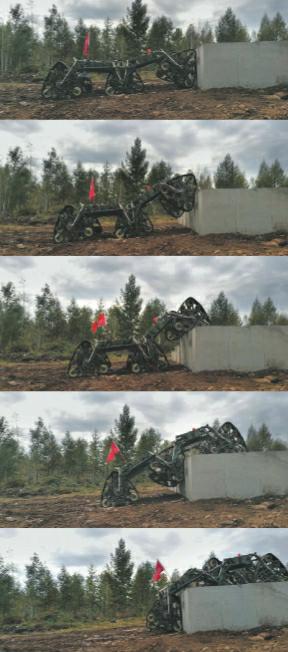
“無畏者”無人車長約5米,寬約2米,自重約2噸。記者剛看到它的六個三角形履帶時,還以為和一種雪地車一樣。結果陳老師告訴記者,它叫做“等三角行星結構履帶輪”。等三角、履帶這倆詞都好理解。行星結構呢?這是一種行星輪,意思是它像太陽系的行星一樣,不僅能自轉,還能公轉。

平時行走時,履帶繞著三角架內的幾個小輪旋轉,這倒是和那種雪地車一樣。你也可以把它看作是有六圈履帶的坦克、拖拉機。但這個三角架不是固定的。遇到高一些的障礙,履帶無法直接克服時,整個三角架就會在阻力作用下旋轉,變成了一個三角形的大“輪胎”。
聽完陳老師的講解,記者不禁想到了很多大媽大爺們買菜用的一種小車——下面也是個三角架,頂端是三個小輪,平時兩輪著地,上樓梯時三角架翻滾。
再這么一看,它的行走方式簡單而巧妙。陳老師介紹說,三角架轉動,不僅是像大輪子,還使爬垂直墻的附著力大大增加,提高了過障能力。普通輪式車只能爬上輪胎半徑一半高度的垂直墻,而且爬墻時,輪胎和墻的接觸只是與墻相切的一條線。履帶車過墻,最大高度取決于前面誘導輪的高度,履帶和墻的接觸也基本只是只是與墻相切的一條線。而“無畏者”過墻時,隨著行星輪轉動,三角形的一個邊都會貼到墻上,接觸面很大,附著力大大提高。由于這個原理,“無畏者”只需要不高的發動機功率,就展示出良好的越野能力。它的動力來源于六個行星輪中間的電機,每個僅2千瓦左右,一共約12千瓦。這只相當于C組小型無人車的20多倍(車重是后者的30倍)。至于同在E組的其它車輛,都是100、200千瓦的發動機。“我們雖然動力小,但動力都用上了。”
電動機通過傳動機構帶動行星輪上的一個主動輪轉動,驅動履帶。至于三角架的轉動,則是根據地形自動適應,不需控制。因此該車的操控也很簡單,不像搖臂式那樣需要另外配備電機或動力源,來驅動搖臂轉動。
看著前后車體之間除了轉軸,還有一根活塞桿,記者詢問這是不是像其它某些參賽車一樣,控制鉸接車體的俯仰。不料陳老師說這只是一根阻尼桿,沒有動力、不需控制的。原來在攀爬障礙時,前部車體完全靠前方履帶的上爬,自己仰起,不需動力抬它。阻尼桿,是為了防止前后車體之間太“活”,過溝、下墻時,出現咣當掉地的摔車現象。
因此該車的遙控設備也很簡單,就是買了一個普通小遙控車的遙控器。操作員也只需要控制車的兩側電機,也就是兩側速度,就可以了。速度有差異,就能像坦克那樣差速轉向。越墻、過溝、爬坡時,則控制好前進速度快慢,防止車體中部劇烈起伏,就可以了。
不僅原理簡單、巧妙,它在結構件選擇上的簡單也超過了記者的預想——電機就是電動車上的電機;小輪之間的彈簧減震器,就是電動車上的減震桿;連接三角架中心和車體的,就是摩托車前輪的減震桿;履帶,是農用拖拉機上的,直接買來套上;車體、行星輪三角架,是自己加工焊接的(記者看到,有的鐵架上還有明顯的缺口、修補,真是“樸素”得很)……一圈轉下來,只有行星輪中間那些白色的尼龍輪,是設計團隊定做的。
原來這次參賽,陸軍軍官學院開頭只是報著試試看的態度參加,沒有準備多少經費。像有些無人車上用的大功率電機,一個就得9萬多,減速器14萬,6個輪子還得乘以6。而“無畏者”的整車花費,都沒有那么多。

也正是這個原因,讓“無畏者”在預賽中出現設備故障,沒賽出好成績。它的電機和鏈條之間,是通過采購現成的普通渦輪蝸桿連接的。整輛車從7月初才開始設計制造,花了暑假不到兩個月時間,加班加點趕制出來。比賽前,它在學院的試驗都很順利,能過墻過溝。這也讓學院領導感到高興,還專門給車隊餞行。預賽前,考慮到多次試驗后的磨損,車隊把六個行星輪里的蝸桿換成了新的。參加完開幕式后,“無畏者”從比賽場地返回場區,走的也是泥濘路,給在場人員留下了深刻印象。可沒想到這采購來的普通民品,質量完好率可沒他們預想的那樣高,廠家也不知道他們是要拿去翻墻過溝走泥路。結果幾天后的比賽中,兩根蝸桿折了,“無畏者”一下失去三分之一動力。第二天,車隊從舊蝸桿中挑了兩根換上,自己到比賽場地跑了一趟。高墻、壕溝、水坑、泥濘路、側傾路、陡坡,都輕松走過,越障能力表現突出,用時48分鐘(預賽中最快的約30分鐘,但沒完成高墻、泥濘路科目)。


速度不快,與它的動力不足有很大關系。這也是因為經費不多,車隊沒有采購更大功率的電機。記者看到行星輪里的空間其實還有不少,可以安裝更大設備。在記者看來,整車在具體結構、尺寸上,還有不少是在將就那些現成的履帶、減震桿、電機,不算是按照設計本意選擇的最優化值。如能完全地“設計設計”,各零部件的性能、規格更加合適,“無畏者”的性能會有很大提高。
陳老師也說是這樣,但比賽就是比賽,必然會有很多偶然因素的。“人家成績好的,確實還是說明人家做得好。”他表示現在“無畏者”還只能算是原理樣車,自然還有一些要改進的地方。從原理上講,它具有一定的優勢。但在工程化的層面上,還有很多工作要做。發展到正樣車階段,可靠性就得更高了。
除了經費,兩個月時間太短,沒法做出定制零件,也束縛了他們的手腳,還有一些設計、想法尚未在“無畏者”上得到體現。
原來這輛“無畏者”,是在學院設計過的好幾款無人車基礎上,集合而成的。陸軍軍官學院有一個“學員創新俱樂部”,老師們帶著學生做一些設計,參加全軍軍用機械創新大賽,全國大學生機械創新大賽。他們設計的小型越障車,玩具那么大小的,參加比賽時都獲得了一等獎。這次挑戰賽前,組委會到學院調查,看到他們的小車結構新穎獨特,于是邀請他們參賽。

學院領導對此很重視,也放開思路,大膽決定由年輕人來當這個項目主要人員。像陳向春老師作為項目組長,是講師,團隊成員都是學院本科生,這樣的團隊在這次挑戰賽里獨一無二。
雖然名次成績不理想,但陸軍軍官學院的這個創新團隊還是表現優異,在這個全國的平臺上得到很多業內專家的認可,也因此受到組委會特別邀請,參加決賽階段的展示表演。
學院教研人員們對這種新式行動裝置的理論研究,也得到挑戰賽主辦方的高度認可。挑戰賽同時進行了學術論壇,出版論文集。陳向春老師等人聯合撰寫的有關一體化動力輪技術的論文,被評為優秀論文。
也許在不久的將來,我們就可以看到這種獨特的無人車,伴隨著戰士們翻山越嶺,無畏地跨向新時代戰場。
