面向移動服務的遙感影像感興趣區提取壓縮方法
2016-12-20 10:00:45吳飛龍濮國梁程承旗王煥炯
測繪通報 2016年11期
關鍵詞:區域
吳飛龍,濮國梁,程承旗,王煥炯,李 濱
(1. 北京大學遙感與地理信息系統研究所,北京 100871; 2. 31009部隊,北京 100088;3. 北京大學工學院,北京 100871; 4. 中國科學院地理科學與資源研究所,北京 100101)
?
面向移動服務的遙感影像感興趣區提取壓縮方法
吳飛龍1,2,濮國梁3,程承旗3,王煥炯4,李 濱1
(1. 北京大學遙感與地理信息系統研究所,北京 100871; 2. 31009部隊,北京 100088;3. 北京大學工學院,北京 100871; 4. 中國科學院地理科學與資源研究所,北京 100101)
在面向移動單元的遙感影像服務中,受信息分發信道窄等因素影響,高價值目標信息根據價值權重進行自適應壓縮的方法將發揮重大作用。本文設計了一套面向移動服務的遙感影像感興趣區全流程自動提取壓縮重構方法,利用數學形態學進行了邊緣檢測,獲取了邊緣點數量,確定了感興趣區域,生成了感興趣區掩模,并將小波域上的感興趣區系數進行了提升,對小波系數矩陣進行了SPIHT量化編碼和解碼重構。通過試驗,模擬在有限的傳輸帶寬下,自動提取感興趣區,對感興趣區進行優先編碼并重構全自動流程,使得移動端獲得高價值目標信息優于背景信息的重構效果,且具有較高的壓縮比,該方法將促進遙感影像在移動服務中的普及應用。
數學形態學;影像壓縮;感興趣區域;移動服務
在面向移動單元的遙感影像服務中,信息分發信道窄嚴重制約了遙感信息的應用發展,對于移動單元所關注的高價值目標信息,需要一種根據信息價值權重進行自適應壓縮的方法。面向上述需求,利用數學形態學方法進行感興趣區域快速提取,并基于價值權重進行自適應壓縮,解決窄帶寬條件下高價值遙感影像的提取和壓縮問題,為遙感影像直接、快速、高效地支持移動單元提供技術支撐。
近年來不少學者研究了感興趣區提取及壓縮算法,李曉飛等通過形態學運算強化特定結構的多個目標區域,運用閾值分割算法完成了圖像區域分割[1];杜維濤等以邊緣梯度方向為圖像分割的準則,提取了圖像的邊緣區域和紋理區域,采用通用部分位平面偏移方法進行了感興趣區編碼,并采用SPIHT編碼進行了壓縮[2];邰華鳳等在小波變換的基礎上,將小波系數劃分為ROI系數和BG系數,然后將ROI系數進行編解碼,得到了較高圖像質量的ROI 區域圖像[3]。
本文結合上述方法,經過多次試驗,運用數學形態學等方法對上述算法進行整合改進,實現感興趣區提取,并采用JPEG2000中的感興趣區編碼和SPIHT編碼對影像進行壓縮編碼,模擬移動服務中漸進傳輸的全過程,發展出一套面向移動服務的遙感影像感興趣區全流程自動提取壓縮重構方法。
一、算法思路
人們往往只對影像中的部分區域感興趣,因此可以對這些區域采用無損或近無損的方法進行壓縮,感興趣區之外可采用高壓縮比處理,在保證不丟失重要信息的同時,又能有效地壓縮數據。將基于感興趣區的編碼方法與漸進傳輸結合起來,使得用戶不必完全接收整幅影像就可以清晰地瀏覽影像中感興趣部分的內容,能更好地滿足用戶的需求。
算法思路如圖1所示:①對原始圖像進行n層小波分解變換;②通過形態學運算得到ROI區域,生成ROI掩模;③在小波系數矩陣中,提升ROI區域小波系數;④使用SPIHT算法進行壓縮編碼;⑤碼流漸進傳輸,可在任何位置打斷,但打斷前收到編碼越多,解碼后圖像質量更好;⑥對解碼后的小波系數,根據ROI掩模恢復背景區域的小波系數;⑦通過小波重構獲得結果圖像,移動端完成接收。
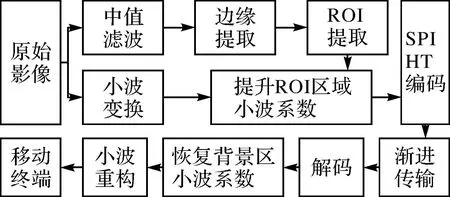
圖1 遙感影像感興趣區提取壓縮算法思路
二、基于數學形態學的感興趣區提取
腐蝕和膨脹是數學形態學的兩種基本運算,并發展出開運算和閉運算兩個重要函數,都以集合的形式進行運算。設A為影像,B為結構元素,則A對B腐蝕定義為
A?B={x|(B)x?A}
(1)
A被B膨脹的定義為

(2)
式中,x是一個表示集合平移的位移量。腐蝕是一種收縮變換,膨脹是一種擴張變換。開運算定義為
open(A,B)=(A?B)⊕B
(3)
閉運算定義為
close(A,B)=(A⊕B)?B
(4)
開運算使影像變小,閉運算使影像增大[4]。
1. 數學形態學與中值濾波進行邊緣提取
中值濾波是基于排序的非線性濾波的典型,保留影像結構的同時可以消除噪聲。選擇模板在影像中漫游,讀取模板下對應像素的灰度值,找到灰度值的中位數并將這個中位數賦給模板中心位置的像素。
采用中值濾波與數學形態學結合的方法進行邊緣提取,具體步驟如下:①使用3×3的中值濾波模板進行中值濾波,影像高頻噪聲被去除,影像邊緣信息被保護;②對影像進行腐蝕運算,使影像邊緣上的灰度得到加強,如圖2所示;③用原影像減去腐蝕后的影像,從而得到影像的邊緣,如圖3所示。設原影像為F,濾波后輸入的影像為A,B為結構元素,則A被B腐蝕
M=A?B
(5)
利用原圖減去腐蝕后的影像,則可獲得影像的邊緣
H=A-M=A-A?B
(6)
此影像上每一個灰度級代表不同等級的邊緣點,灰度值越高邊緣越明顯。

圖2 腐蝕運算邊緣檢測原理
2. 數學形態學進行感興趣區提取
對影像分塊,計算塊內邊緣點的數量,如果小于一定的閾值t,定義為背景區(BG);大于t,則定義為感興趣區(ROI)。Sum(Grad)為邊緣點的數量,一般取t= 0.05。分塊大小與壓縮時小波分解的層數有關。小波分解的層數為n,則塊大小不應小于2n×2n。將小波分解的層數定為4,故每一小塊大小為16×16。
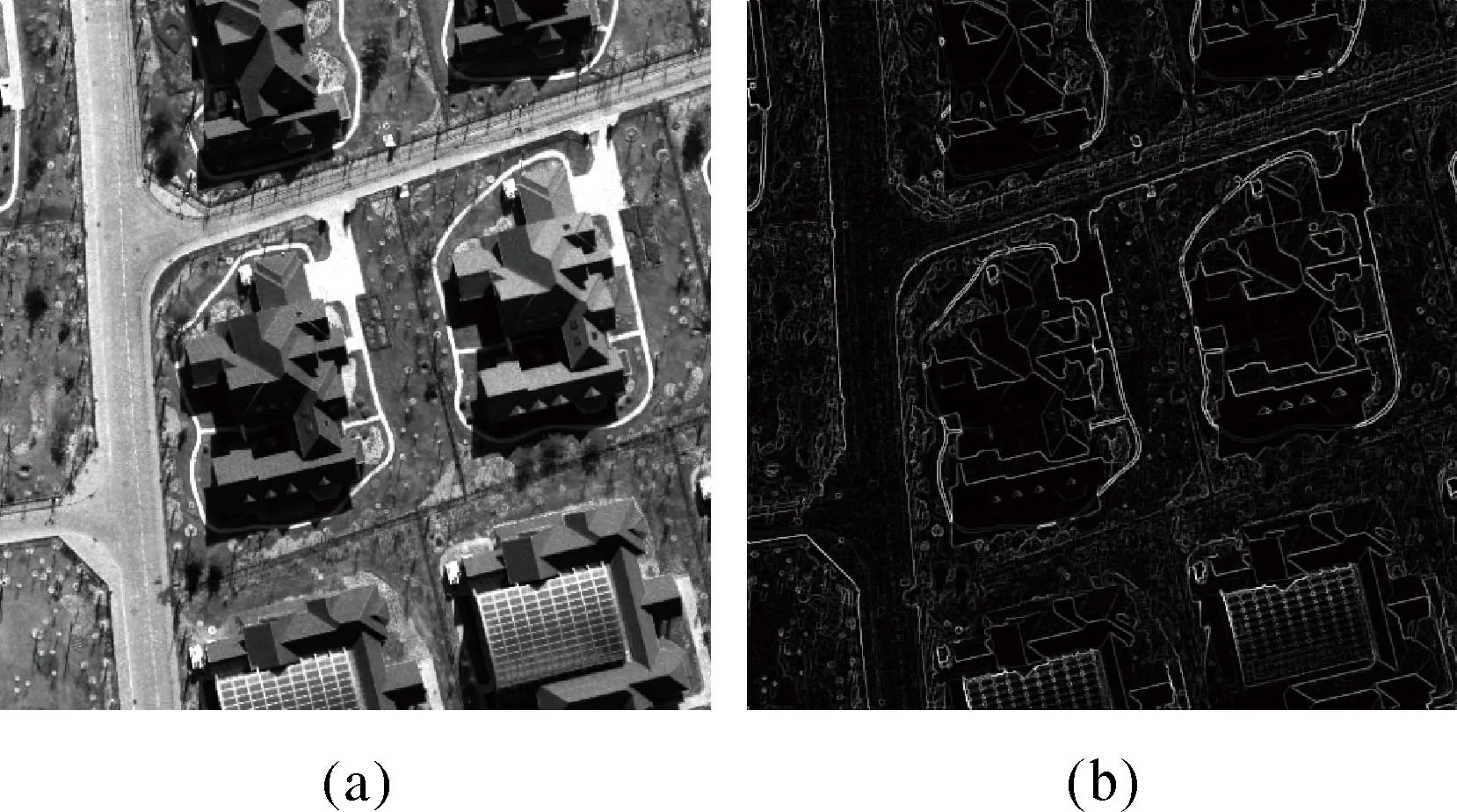
圖3 原始影像及邊緣檢測
(7)
邊緣點數量判斷的ROI區域很雜亂,沒有形成區域狀,需采取數學形態學中開運算和閉運算結合的開閉運算混合濾波方法對影像進行處理。先進行閉運算,去掉中間的空洞并填補輪廓上的縫隙;再進行開運算,去掉ROI區域中細的突出;由此形成一個規則完整的ROI區域。如圖4所示,與原始影像對比發現,建筑物被清晰地提取出來。
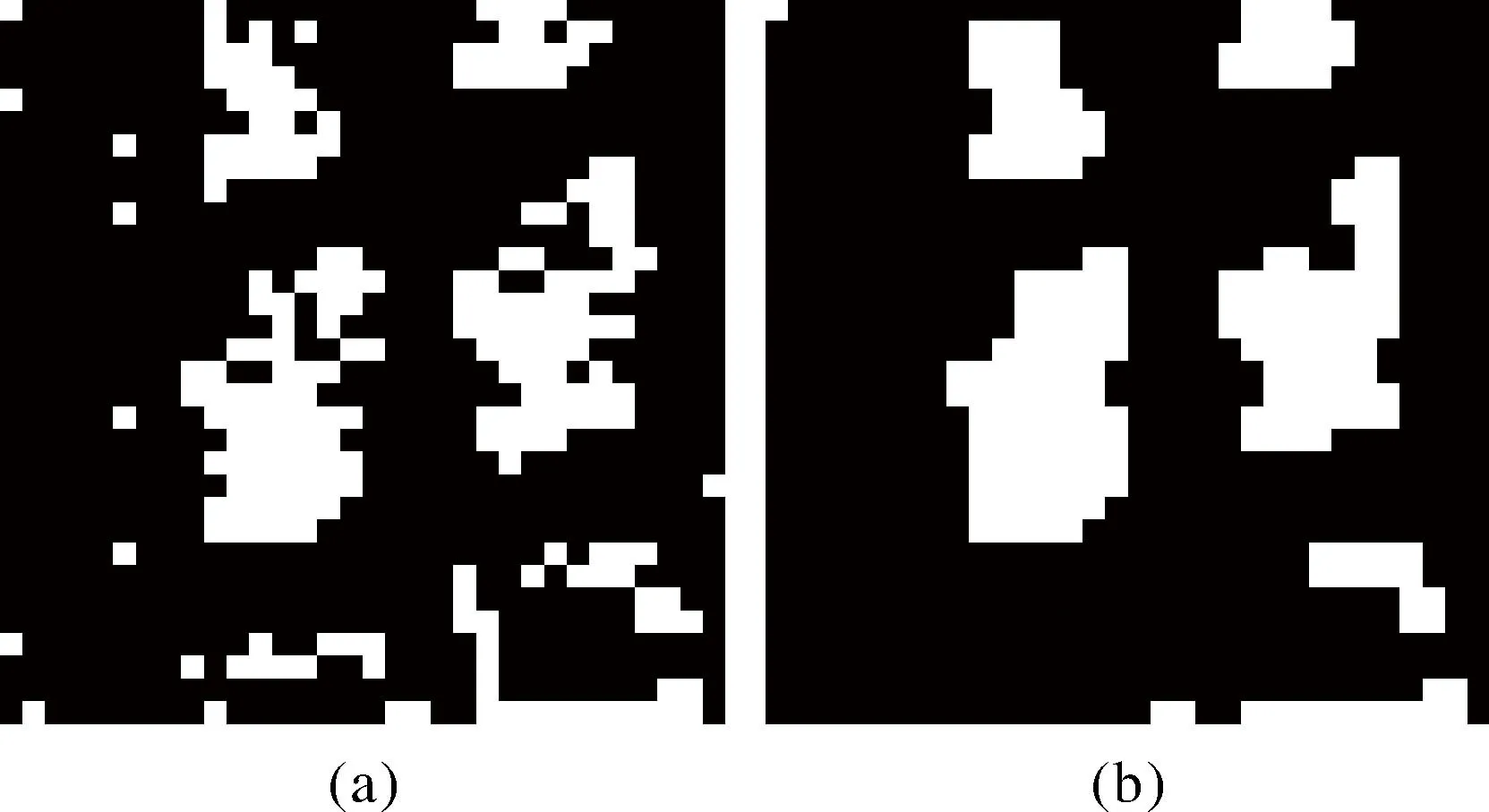
圖4 邊緣點數量判斷的ROI區域及形態學后處理
三、基于JPEG2000的感興趣區編碼
1. 小波變換及感興趣區編碼
獲得ROI區域后,小波變換編碼無法直接使用,必須轉成小波變換相應層數的ROI掩模。對每個ROI點,根據它在原始影像中的比例位置,分別求出N級小波變換形成的3N+1個子帶中的相對位置。這種方法沒有考慮具體濾波器的操作,并不能保證能獲得所有與ROI相關的系數,特別是邊緣可能有小部分損失,但這并不影響ROI的編碼質量。因此,采用簡單的遞推法,但卻降低了ROI掩模生成的復雜性。
JPEG2000壓縮標準中定義了感興趣區編碼方法,規定了兩種標準算法:一種是基于縮放的一般方法,另一種是最大位移方法,均通過按比例縮小背景區系數實現,使得感興趣區系數相比于背景區系數位于更高的比特平面[2]。在熵編碼時,感興趣區系數將比背景區域系數優先進行編碼并組織碼流。在面向移動服務的漸進傳輸中,感興趣區比背景區更精確地優先傳輸給解碼器,由此獲得保留更多感興趣區信息前提下的高壓縮性能。
二維離散小波變換可以將二維影像在不同的尺度上進行分解,得到近似分量LL,水平細節分量LH、垂直細節分量HL、對角細節分量HH;再對LL進行分解得到第二級小波變換,依此類推。對影像進行4級小波變換,得到同樣大小的小波系數矩陣,如圖5所示。
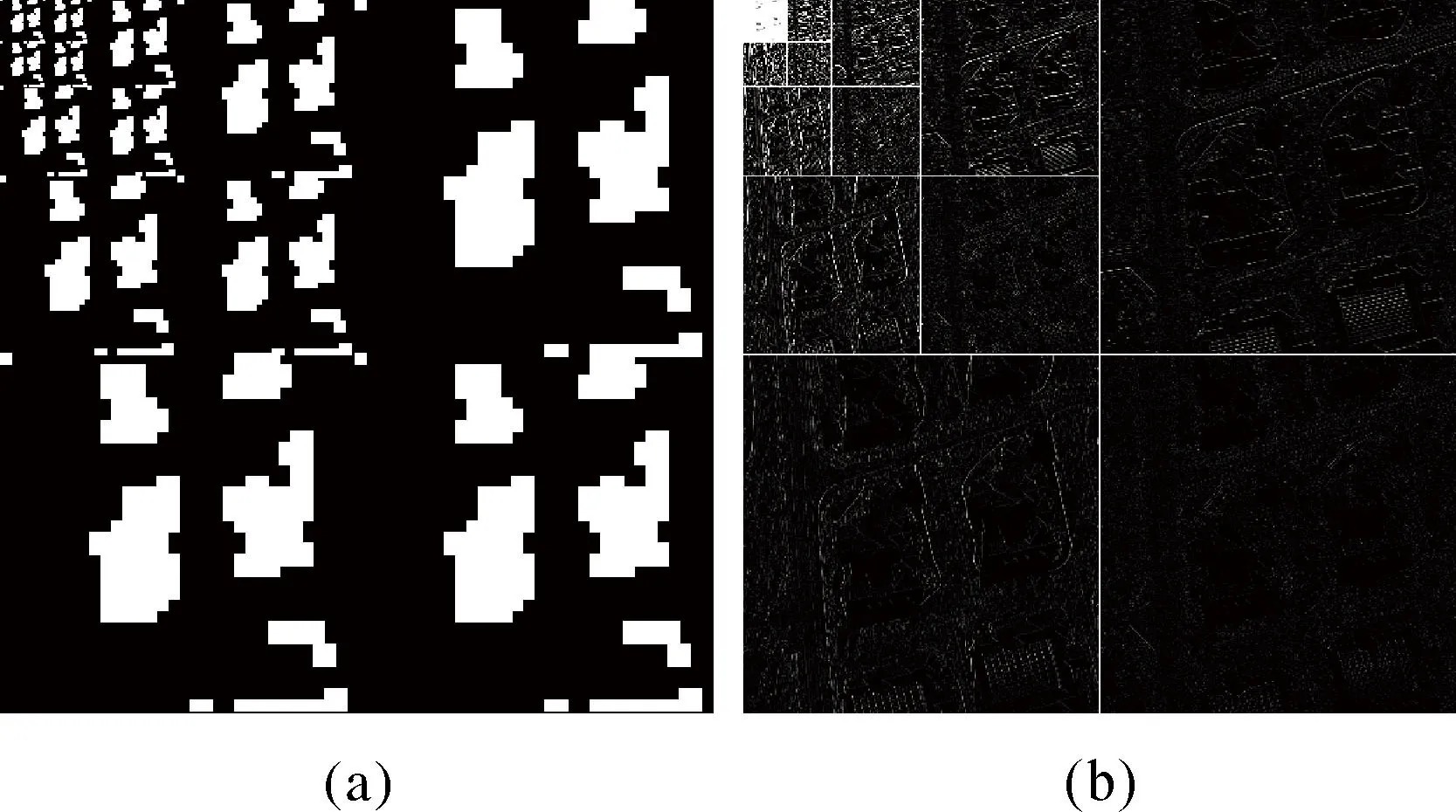
圖5 4層小波分解掩模及分解影像
用影像作為底面,表示像素亮度大小的8位二進制數作為高度,形成一個立體直方圖,各像素位置相同的位形成一個平面,稱為位平面。位平面平移是二進制數小數點的平移,即將小波系數背景區的值除以2n,n的值由位平移算法決定。為簡化算法,在ROI掩模中,將背景區的小波系數除以22,即通過簡單位平面平移方法,獲得ROI編碼。
2. 子帶編碼、解碼與重構
子帶編碼采用基于嵌入式零樹編碼思想的SPIHT算法,它將某一樹節點及其所有后繼節點劃歸為同一集合,并采用適當的集合分割排序策略,通過初始化、排序過程、細化過程和量化步長更新等4個子工程,完成嵌入編碼[2]。SPIHT編碼在系數子集的分割和重要信息的傳輸方面采用了獨特的方法,能夠實現幅值大的系數優先傳輸的同時,隱式地傳送系數的排序信息,具有較高的峰值信噪比(PSNR)和較好的影像復原質量,是一種適合于感興趣區壓縮的編碼方法。SPIHT算法請參考相關文獻。
通過上述編碼,形成了一系列由0和1構成的二進制碼流。解碼是編碼的逆過程,將編碼算法的輸入和輸出調換,就是解碼算法。解碼的精度與編碼的級數有關。在碼流傳輸過程中,影像是逐漸變清晰的。假如對小波系數矩陣進行了10級編碼,傳輸過程按1、2、…、10級的順序進行,每傳到一級都可以獲得一個重構影像,10級解碼會獲得比1級解碼更好的重構影像,即重構影像的質量隨著碼流的漸進傳輸越來越好。面向移動單元的服務中,信息分發信道窄的條件下,上述漸進傳輸的方法可讓用戶先看到高價值目標信息,再逐漸看到完整影像。為節省流量,也可以提前中斷解碼過程,并不影響用戶接收高價值目標信息。
為保證小波重構能夠跟原始影像接近,需將背景區域的小波系數乘以22,恢復到原始數值,實現背景區小波系數的恢復。將小波系數矩陣進行小波逆變換,恢復為重構影像。原始影像采用Daubechies9/7雙正交小波,對影像進行4級小波分解,10級SPIHT編碼。如圖6所示,模擬漸進傳輸的過程中進行解碼重構,影像的質量越來越好,符合漸進傳輸的特點,ROI區比背景區具有更好的重構質量。
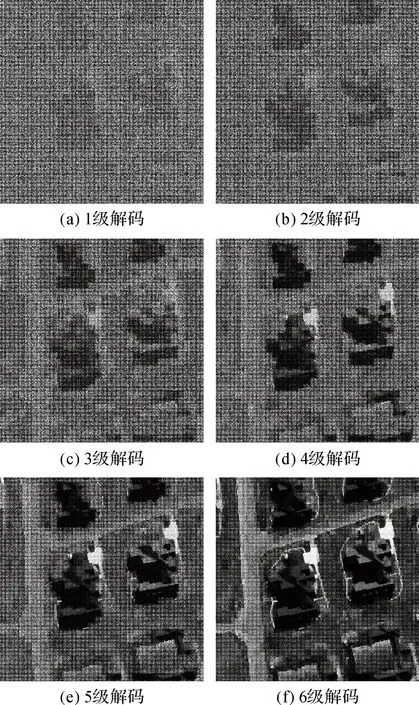
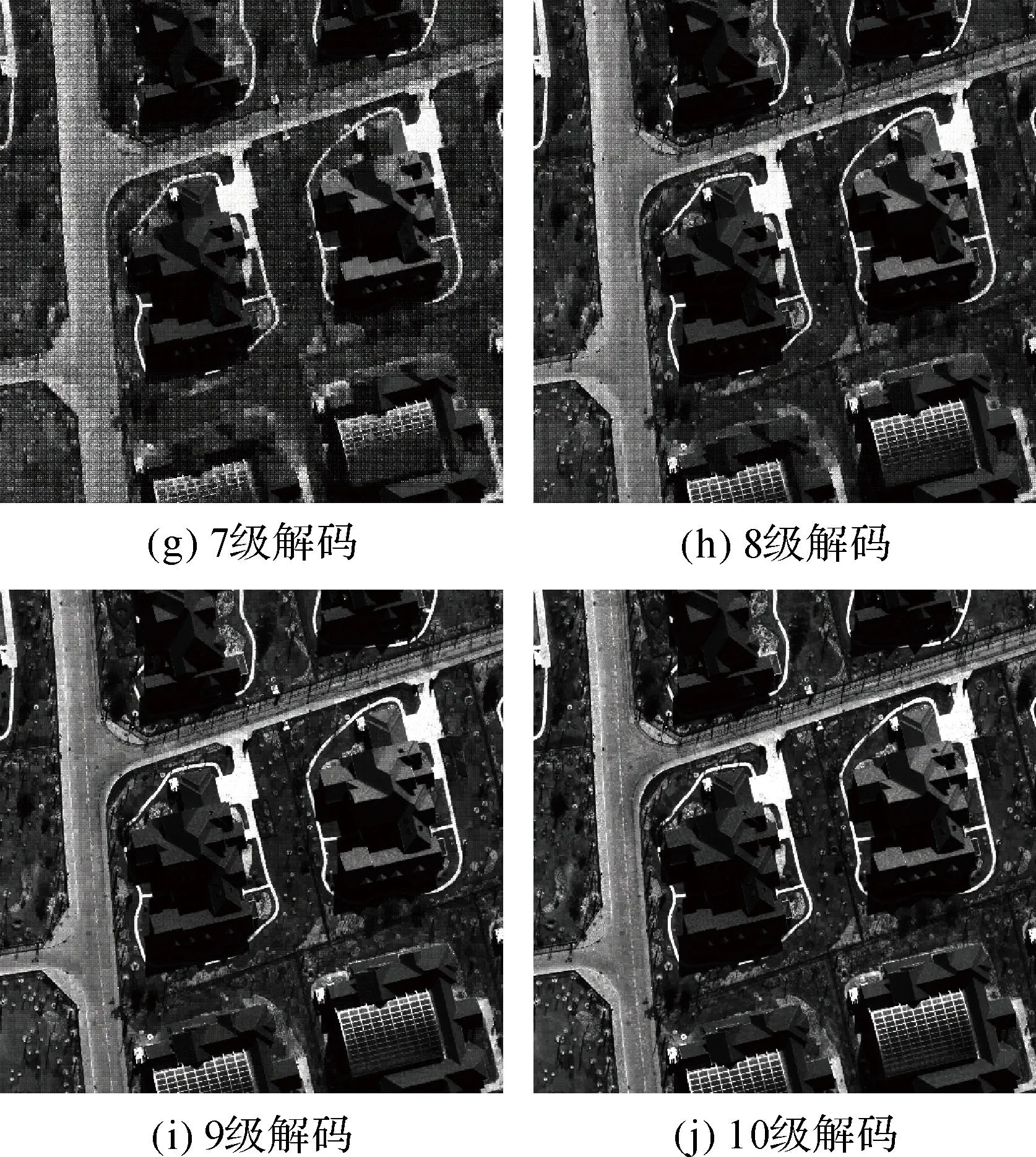
圖6 影像漸進傳輸模擬過程
四、試驗結果分析及結論
引入兩個概念對試驗結果進行分析,峰值信噪比(PSNR)和影像壓縮比。PSNR為衡量經過處理后的影像品質,值越大代表失真越少,計算公式為
(8)
式中,xmax為8 bits表示法的最大值255;MSE為mean square error,均方誤差;xij與yij表示原影像和重構影像上(i,j)點處的灰度值;PSNR的單位為dB。影像壓縮比指原影像大小比值壓縮后大小,壓縮比越大說明壓縮效果越好。分別計算ROI和背景區的PSNR,獲得影像漸進傳輸中影像質量變化情況見表1。
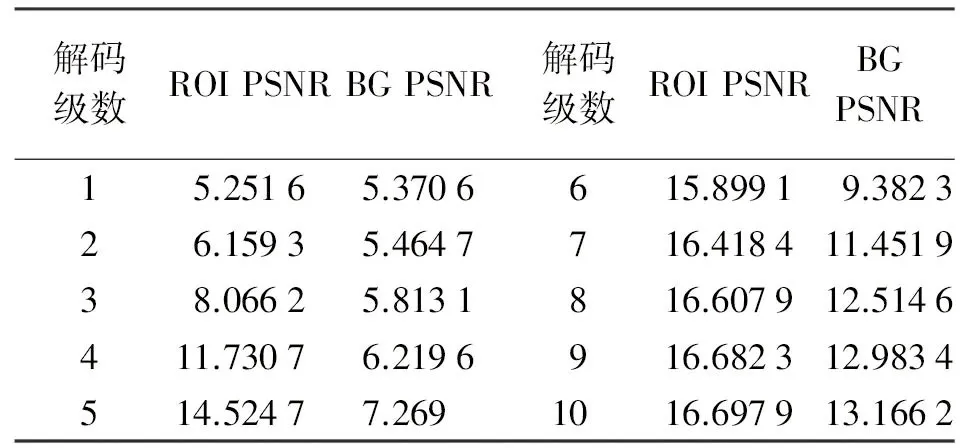
表1 影像漸進傳輸過程中的PSNR值 dB
如圖7所示,ROI區的PSNR值高于背景區,并隨著碼流的傳輸相差逐漸拉大,而后又逐漸趨近。ROI比背景區獲得了更好的重構效果,隨著重構級數的上升,背景區的PSNR也逐漸上升,但ROI區始終有比背景區更好的重構質量。
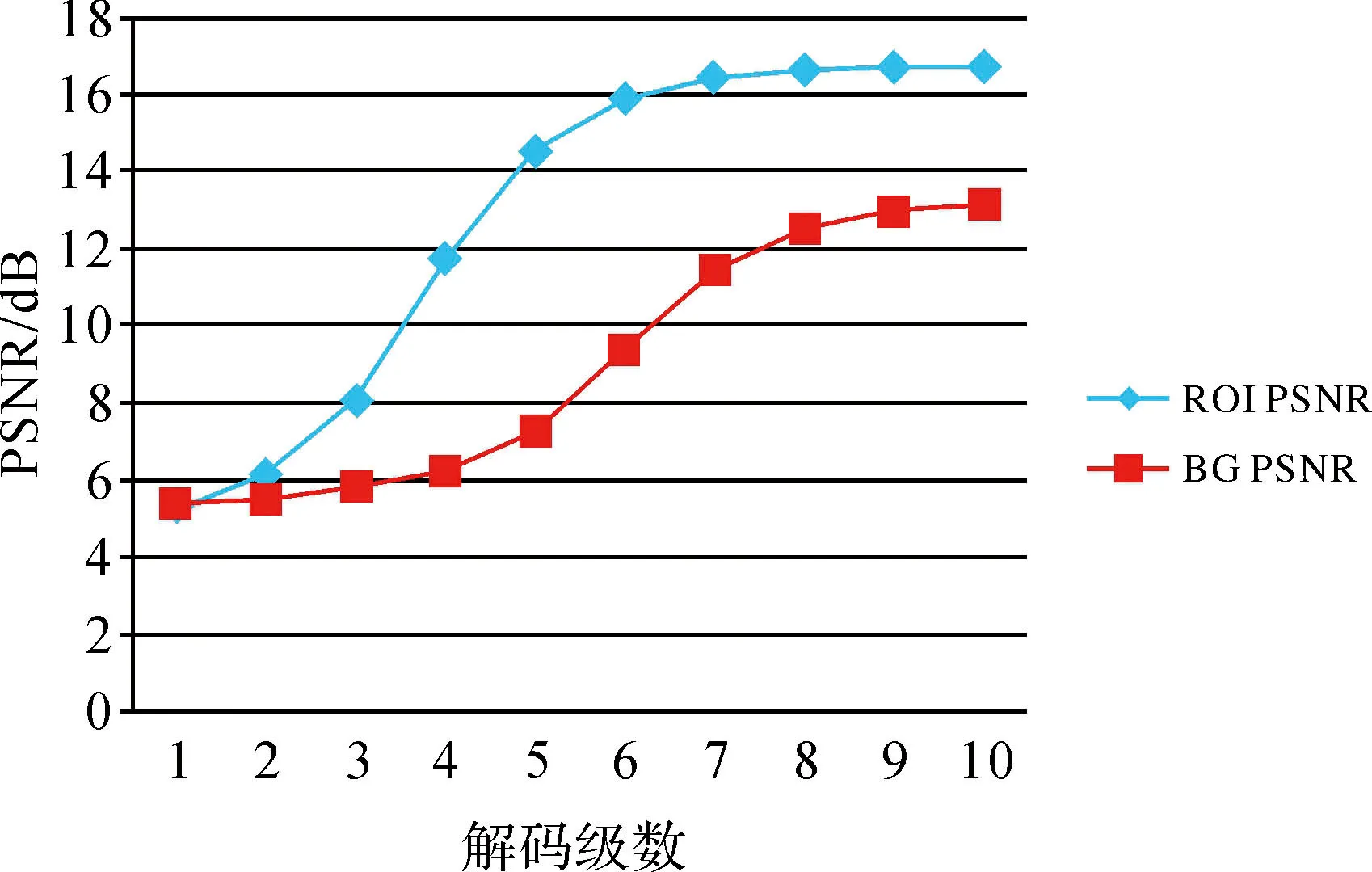
圖7 影像漸進傳輸過程中PSNR值比較
采用Daubechies 9/7雙正交小波,對影像進行4級小波分解,分別進行10、11、12級SPIHT編碼和同樣級數的解碼,進行壓縮比和不同編碼級別影像質量評價(見表2)。隨著編碼級數的增加,壓縮率逐漸增加,PSNR也逐漸增加,影像質量逐漸變高。一般來說,當PSNR達到30時,人眼已經難以分辨重構影像與原影像的不同,那么11級編碼已經足以符合要求,其壓縮比為2.7,這樣的壓縮比是可觀的。

表2 影像不同編碼級數壓縮率和PSNR變化
經過上述試驗驗證得知,本方法實現了遙感影像的ROI區提取、壓縮編碼、解碼重構的全自動流程,保留了高價值目標信息,且較高的壓縮比有利于遙感影像在帶寬有限條件下傳輸,并節約大量存儲空間,將能夠促進遙感影像在移動服務中的普及應用。
[1] 李曉飛,馬大瑋,范小麟,等. 基于數學形態學的遙感圖像多感興趣區域提取[J]. 計算機技術與發展,2007,17(12):56-59.
[2] 杜維濤,劉方,陶永寬,等. 一種遙感圖像多級感興趣區域的壓縮方法[J]. 計算機仿真,2008,25(9):215-219.
[3] 邰華鳳,黃大慶. 基于小波變換的感興趣區域圖像壓縮算法[J].蘇州科技學院學報(自然科學版),2010,27(3):51-54.
[4] 王慧鋒,戰桂禮,羅曉明. 基于數學形態學的邊緣檢測算法研究及應用[J]. 計算機工程與應用,2009,45(9):223-226.
[5] 梁燕,劉文耀,鄭偉. 實現感興趣區域編碼的通用部分位平面偏移法[J]. 光電子·激光, 2004, 15 (11):1334-1338.
[6] 強永剛, 殷建平,祝恩,等. 基于小波變換和數學形態學的遙感圖像人工建筑區提取[J]. 中國圖象圖形學報,2008,13(8):1459-1464.
[7] 萬紅林,焦李成,王桂婷,等. 在感興趣的區域層面上進行SAR圖像變化檢測的方法研究[J]. 測繪學報,2012,41(2):239-245.
[8] 王曉芳,邱書波,張緒光. 基于小波變換的ROI 圖像壓縮改進算法研究[J]. 計算機工程與科學, 2010,32(8):84-133.
[9] 席志紅,許新利,劉利彬. 基于SPIHT算法的感興趣區域編碼的研究[J]. 應用科技,2007,34(1):31-34.
[10] 卓力,沈蘭蓀,KIN-MAN L. 基于感興趣區的圖像編碼與漸進傳輸[J]. 電子學報,2004,32(3):411-415.
Remote Sense Image Mobile Service Oriented Method of ROIs Extraction and Compression
WU Feilong,PU Guoliang,CHENG Chengqi,WANG Huanjiong,LI Bin
2015-12-10
國家高分重大專項(30-Y30B13-9003-14/16;03-Y30B06-9001-13/15);航天八院自主研發項目(ZY2014-093)
吳飛龍(1988—),男,博士生,主要研究方向為空間數據組織及計算分析。E-mail:feilong270@qq.com
濮國梁
吳飛龍,濮國梁,程承旗,等. 面向移動服務的遙感影像感興趣區提取壓縮方法[J].測繪通報,2016(11):35-38.
10.13474/j.cnki.11-2246.2016.0360.
P23
B
0494-0911(2016)11-0035-04
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
