基于目標點精度要求的設站點誤差分析及點位選取
2016-12-20 09:59:23聶桂根王克志左莉莉
測繪通報 2016年11期
關鍵詞:測量
聶桂根,王克志,左莉莉
(1. 武漢大學衛星導航定位技術研究中心,湖北 武漢 430079; 2. 武漢市橋梁工程有限公司,湖北 武漢 430070; 3. 大漢陽現代有軌電車試驗線BT公司,湖北 武漢 430050)
?
基于目標點精度要求的設站點誤差分析及點位選取
聶桂根1,王克志1,左莉莉2,3
(1. 武漢大學衛星導航定位技術研究中心,湖北 武漢 430079; 2. 武漢市橋梁工程有限公司,湖北 武漢 430070; 3. 大漢陽現代有軌電車試驗線BT公司,湖北 武漢 430050)
分析了利用測量機器人TS30進行變形監測過程中平面點位中誤差的傳播規律,并根據目標點的精度要求和測量過程產生的最大測量誤差計算了設站點平面點位中誤差需要達到的要求;結合部分基準點的點位坐標繪制了設站點的平面點位中誤差等值圖,分析了基準點附近設站點的平面點位中誤差分布規律,可作為設站點的點位選取參考。
中誤差等值圖;自由設站;測量機器人
在變形監測領域,測量機器人的出現,使得監測數據的獲取朝著自動化、智能化、系統化的方向發展。而設站點的平面坐標誤差在變形監測數據采集過程中會傳遞給目標點,因此設站點的點位不能任意選取,需要了解基準點附近自由設站點的點位誤差分布情況。
在變形監測工程中,一般會設置多個基準點(大于3個)和若干設站點[1],基準點作為參考點,設站點位于變形體上,通常會發生移動。利用自由設站方法[2],在開始目標點的測量之前,先精確計算設站點的平面坐標,如果坐標精度合格則進行后續目標點的監測和分析計算。在不同應用領域中,徠卡測量機器人TS30超高精度全站儀采用自由設站法,能夠達到1~2 mm的精度,滿足變形監測的精度要求,在管線閘道變形觀測中取得了良好的效果[3];通過對基坑邊坡水平位移監測工作進行評估,TS30測量機器人能夠讓精度要求極高的基坑監測工作變得簡單起來[4];在地鐵隧道自動化監測過程中,采用自由設站的邊角后方交會方式,通過計算不同數目控制點下設站點坐標改正,得到TM30 0.5″儀器能夠提高的相對精度[5]。
在分析自由設站點坐標誤差的過程中,對于3個控制點的情況,若采用方向后方交會法,則存在危險圓的問題[6],即如果設站點與控制點在同一外接圓上,那么設站點的誤差將為無限大,但當設站點位于控制點所圍成的三角形內切圓的圓心時,設站點的點位誤差最小,此時為最佳設站點[6]。邊角后方交會法中如果測量邊長大于控制點邊長,方程的解會有多重性[7]的問題。通過邊角后方交會計算公式容易獲得兩個基準點情況下設站點的誤差等值圖[8],但是對于多個基準點的情況根據公式獲得等值圖的過程較為繁瑣。TS30[9]能夠對基準點同時進行方向和距離的精確觀測,但從參數求解的公式直接分析設站點位中誤差分布規律的過程較為繁瑣。本文通過在基準點周圍計算格網分布各自由設站點位中誤差,繪制中誤差等值圖,從而進一步分析設站平面點位誤差分布情況。根據測量規范中目標點的平面點位精度要求及測量過程中的測量誤差計算設站點的誤差范圍,結合設站點位中誤差等值圖可以選擇合適的自由設站范圍。
一、自由設站平面點位精度要求
設測量過程中水平角為α,豎直角為β,斜距為S,并令平距D=Scosβ,假設設站點無誤差,則目標點點位誤差計算[10]如下
式中,mS、mα、mβ分別表示測量過程中斜距、水平角、豎直角中誤差。假設mα=mβ,則可知當S=D時,測量過程中最弱目標點的測量中誤差mmax存在,且

設工程測量規范或項目設計書中對于目標點的點位平面誤差要求為mqhmax,則相應的設站點點位平面中誤差也存在一個最大值,設為mphmax,且滿足

根據TS30不同測量(測角測距)模式,在最大測程3500 m范圍內mmax與觀測距離S的關系見表1。
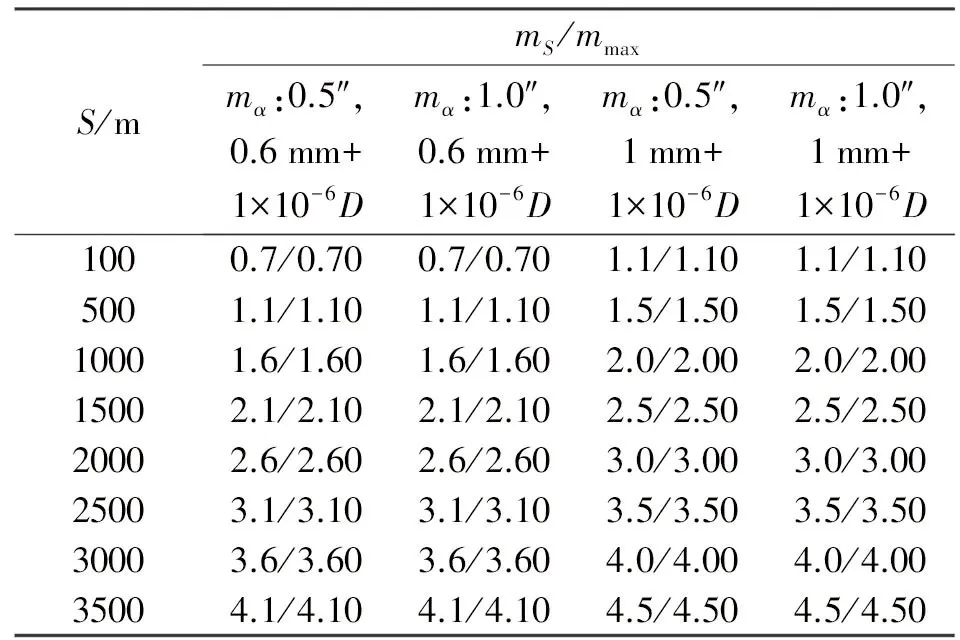
表1 最大測量誤差與觀測距離S的關系
以測角精度mα=0.5″,測距精度1 mm+1×10-6D的測量模式為例,表2計算了在不同測量距離及不同目標點精度要求下自由設站點的平面點位中誤差。
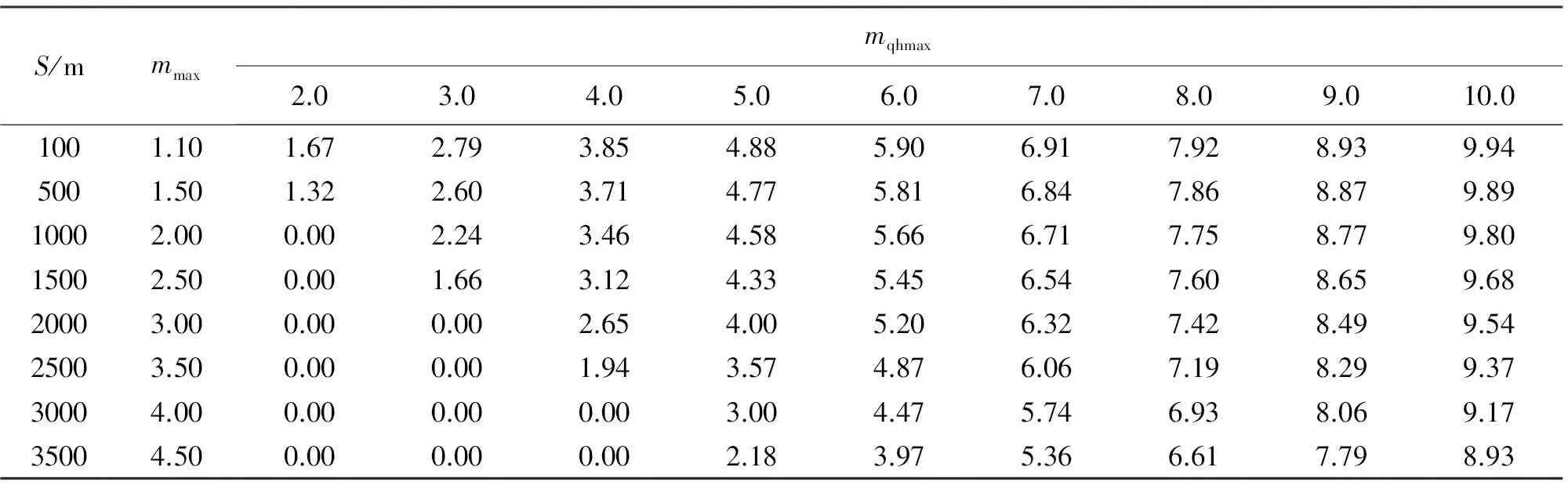
表2 不同測量距離下的自由設站點平面點位誤差要求最大值 mm
二、設站點點位中誤差等值圖的繪制
基準點附近設站點點位中誤差等值圖繪制過程如下。


對于邊長觀測值,其誤差方程為
因為這里并沒有進行參數的求解過程,只考慮中誤差傳播過程,因此要把B中用于觀測方程單位同一化用的常數ρ省略。
4) 重復以上過程,在基準點周圍計算格網分布各點的平面點位中誤差。
5) 根據格網中誤差數據并利用Matlab繪制基準點中誤差等值圖。
任意選取平面坐標如表3所示的6個基準點,根據以上過程繪制了采用3、4、5、6個基準點設站的點位誤差等值圖,如圖1—圖4所示。
三、設站點點位中誤差分布規律及點位統計
由圖1—圖4可以看出設站點誤差有以下分布規律:
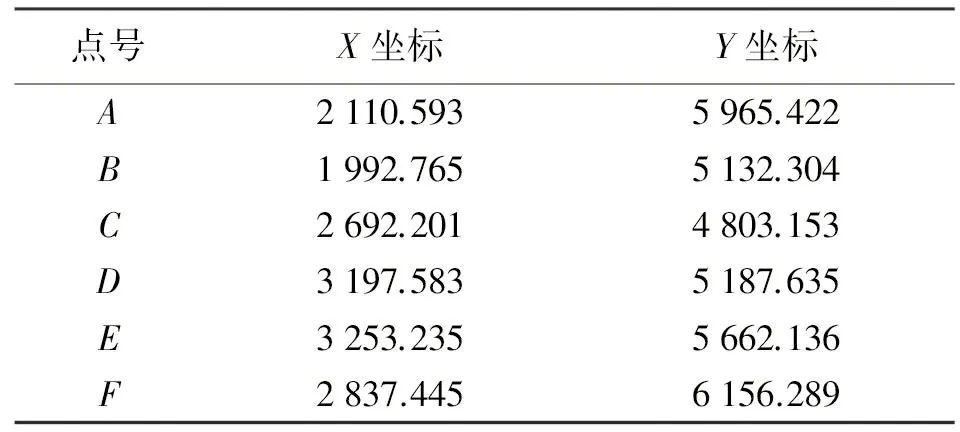
表3 基準點平面坐標 m
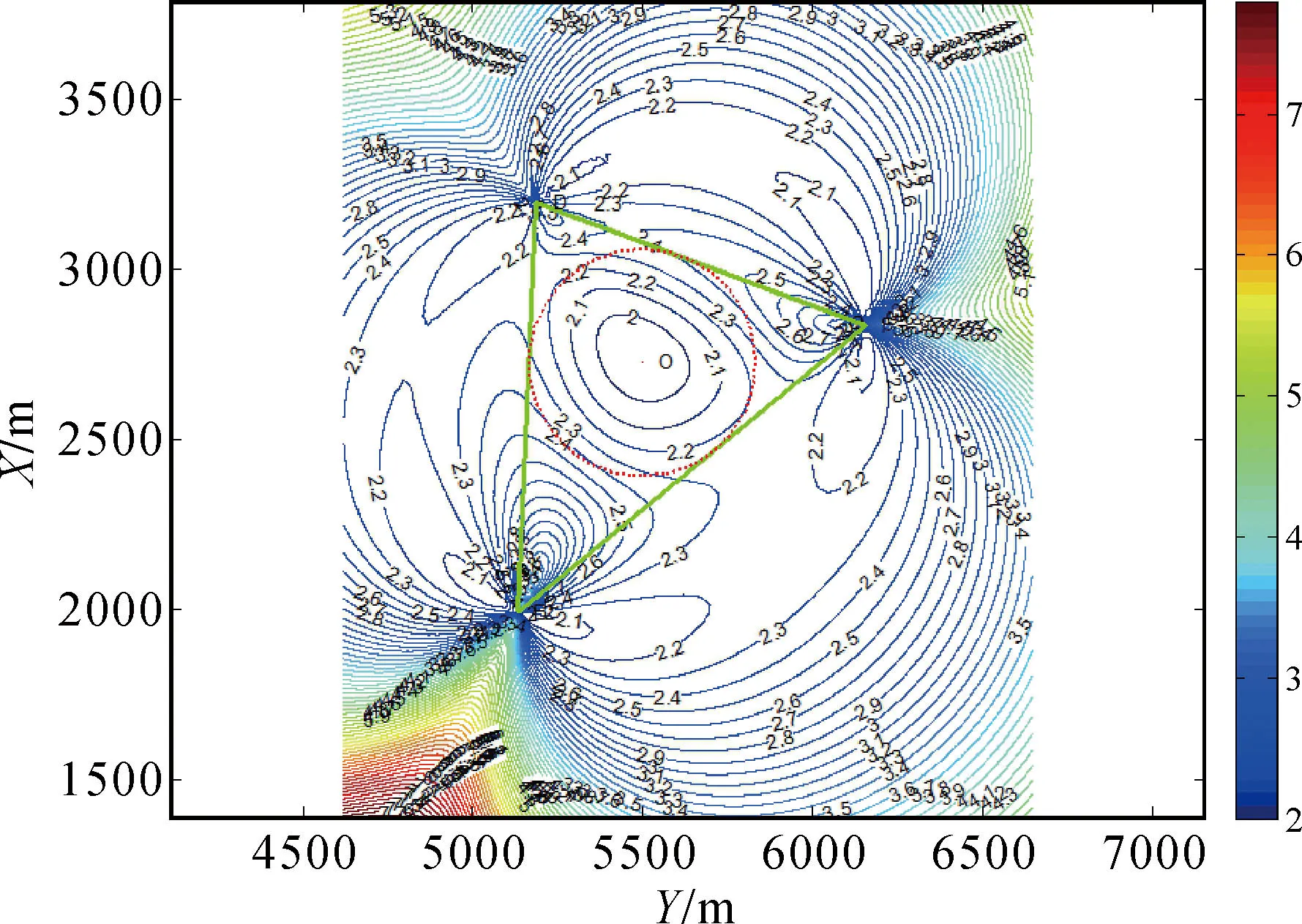
圖1 3個基準點下的設站點誤差等值圖
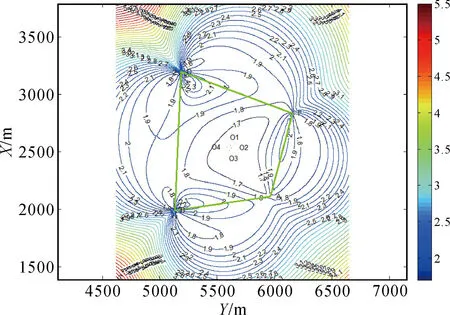
圖2 4個基準點下的設站點誤差等值圖
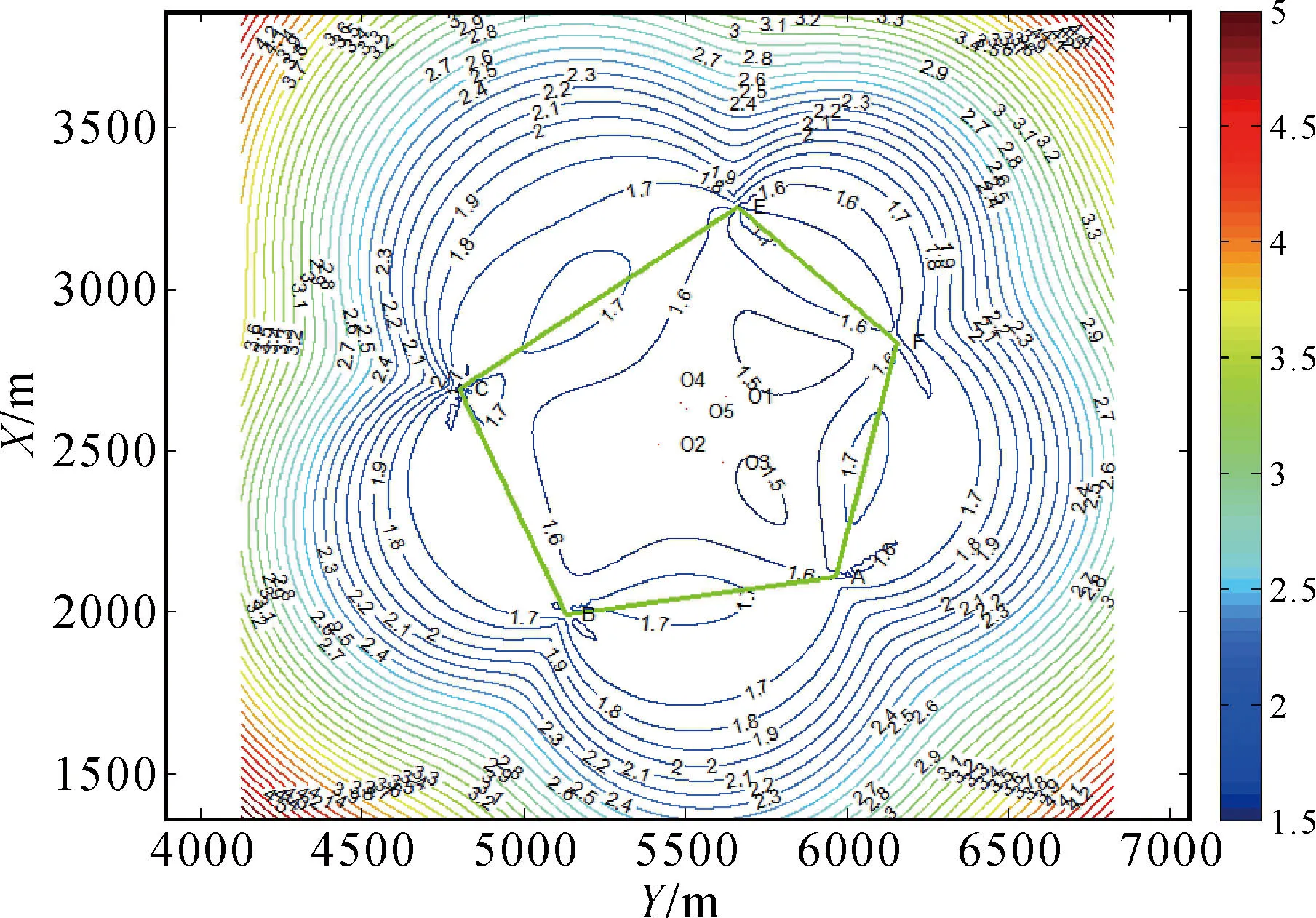
圖3 5個基準點下的設站點誤差等值圖

圖4 6個基準點下的設站點誤差等值圖
1) 點位誤差分布以基準點外圍圖形的每條邊的中垂線為對稱軸呈對稱分布,且在外圍圖形外側隨著距該邊距離的增大,點位中誤差逐漸增大;在外圍圖形內側隨著距該邊距離的增大,點位中誤差逐漸減小,但增減緩慢。
2) 點位誤差分布以內心與各基準點連線為對稱軸呈對稱分布,且在外圍圖形外側隨著距該基準點距離的增大,點位誤差逐漸增大;在外圍圖形內側隨著距該基準點距離的增大,點位誤差逐漸減小,但增減迅速。
3) 為提高設站點精度,設站點應盡量位于外圍圖形內側并遠離基準點。
4) 與方向后方交會情況類似,點位誤差最小的點,即最佳設站點的位置在基準點外圍圖形內側的內心附近(圖中O點附近)。
以圖2為例,并結合表1對需要達到的設站精度進行了統計,以此來說明各設站精度的設站空間范圍。設站范圍表示為小于該設站精度的空間范圍面積與中誤差等值圖總范圍面積的比值,具體數值見表4,由此可以得到對某個精度要求的設站范圍的大小。
由表4可以看出,隨著對設站精度要求的提高,可以用于設站的范圍逐漸減小,如果某一變形監測項目對設站點的點位精度有比較高的要求,則可以通過相應的設站點點位中誤差等值圖尋找最佳設站位置,有時可能不存在這樣的設站位置,此時需要考慮重新布設基準點的位置或改變測量模式來提高測量精度。如果對設站點的點位精度要求不是很高,則可以進一步從原始等值圖中提取某一誤差對應的單條誤差等值線并根據該等值線范圍確定設站范圍,同時在該范圍內還可以結合其他地形因素或不利于設站的干擾因素確定可以用于設站的位置。
構建基準點附近設站點位中誤差等值圖的目的是可以在變形監測工程施工前對設站點和基準點的位置進行模擬,基于目標點的精度要求和測量誤差對設站點位置的選取進行可行性分析;同時規劃出用于變形監測的設站點的設站范圍。
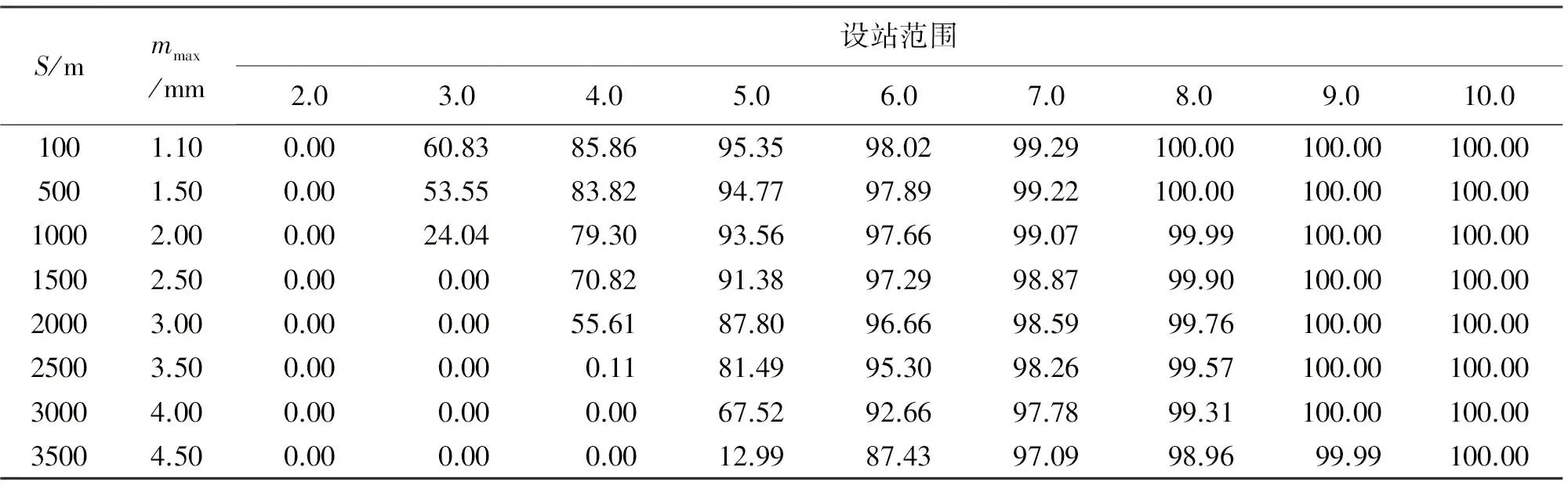
表4 4個基準點設站點的可用點位范圍統計 (%)
四、結束語
本文基于目標點的點位精度要求及測量過程中中誤差的傳播規律,采用繪制中誤差等值圖的方式,分析了在基準點附近進行自由設站時設站點的點位中誤差分布規律。采用這種繪圖方式能夠脫離復雜公式的束縛,直觀獲得最佳設站點或最佳設站范圍,在該范圍內可以進一步結合基準點附近的地形分布及影響設站的環境因素,能夠進一步指導在有利地形設站。
本文假設基準點是沒有誤差的,對于考慮基準點點位誤差的情況需要進一步分析討論。
[1] 張正祿,李廣云,潘國榮,等.工程測量學[M]. 武漢:武漢大學出版社,2005:180.
[2] 潘正風,程效軍,成樞,等.數字測圖原理與應用[M]. 武漢:武漢大學出版社,2009:201-203.
[3] 王洪.徠卡TS30超高精度全站儀在變形監測中的應用[J]. 遼寧工程技術大學學報(自然科學版),2015(3):401-404.
[4] 易致禮,張維,李寶安.徠卡TM30精密監測機器人在基坑邊坡水平位移監測中的應用[J]. 測繪通報,2014(S2):19-22.
[5] 吳燦鑫,胡雷鳴,付和寬.地鐵隧道自動化監測精度分析[J]. 測繪通報,2015(1):137-138.
[6] 嚴伯鐸.后方交會的優化及最佳幾何圖形[J]. 勘察科學技術,2000(4):46-50.
[7] 李全信.邊角后方交會的精度分析及布設方案選擇[J].測繪工程,2000(3):48-52.
[8] 崔有禎,韓光瞬,李文杰.邊角后方交會最優圖形與精度分析[J]. 北京測繪,2011(3):89-90.
[9] 楊俊志.常用大地測量儀器名稱及相關術語的標準化[J]. 測繪通報,2004(2):65-66.
[10] 曾勇.基于TS30測量機器人地殼形變自動數據采集系統的研究與應用[D]. 西安:西安科技大學, 2014:28-29.
[11] 武漢大學測繪學院測量平差學科組.誤差理論與測量平差基礎[M]. 武漢:武漢大學出版社,2009:123.
Error Analysis and Station Selection Based on the Requisite of Target Positioning Precision
NIE Guigen,WANG Kezhi,ZUO Lili
2016-01-05;
2016-04-19
國家863計劃(2013GX06D01217)
聶桂根(1964—),男,博士,教授,主要從事衛星大地測量方面的研究工作。E-mail: ggnie@whu.edu.cn
聶桂根,王克志,左莉莉.基于目標點精度要求的設站點誤差分析及點位選取[J].測繪通報,2016(11):51-54.
10.13474/j.cnki.11-2246.2016.0364.
P258
B
0494-0911(2016)11-0051-04
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
