一種基于RFID的定位方法
2016-12-20 03:08:32袁曉峰
無線電通信技術 2016年6期
關鍵詞:信號
袁曉峰,陳 頎
(昆明理工大學 信息工程與自動化學院,云南 昆明 650500)
?
一種基于RFID的定位方法
袁曉峰,陳 頎
(昆明理工大學 信息工程與自動化學院,云南 昆明 650500)
針對現有的RFID定位方法只適合室內小范圍定位,大范圍定位成本非常高,無較大可行性,且技術過于復雜的問題,提出了一種新RFID定位方法,即使用一個閱讀器天線布置在定位區域的中心位置,然后按一定角速度轉動。根據讀回的接收信號強度(Received Signal Strength Indicator,RSSI)與轉動的角度之間的數據,使用小波閾值去噪處理,再使用最大值法求得角度;最后根據RSSI與距離的關系求得距離,從而實現定位。由于實驗條件所限,所以先采用對數路徑損耗模型建立起研究對象的模型,依據該模型進行仿真實驗,結果表明,該方法可以滿足室內、室外大范圍的,精度要求不是很高的定位需求。
RFID;小波去噪;RSSI;定位;對數距離路徑損耗模型
0 引言
隨著無線技術深入發展,實時定位(RTLS)自然而然的就被提了出來。RFID(Radio Frequeney Identifieation)具有非接觸性、抗干擾性強、定位快、識別距離遠及非視距定位等特性,從而成為RTLS的主要研究方向之一[1]。
目前比較典型的RFID實時定位系統,主要有3D-ID[2]、SpotON[3]及 LANDMARC[4]。其中,LANDMARC系統最為典型,可行性最高。LANDMARC系統引入了參考標簽的概念,是將RFID技術應用到室內定位當中并搭建起完整系統、取得較好定位精度的首次嘗試。通過使用參考標簽代替一部分RFID讀寫器,使RFID成為一種有成本效益的定位技術[5]。但是其定位范圍過小,如果在室外進行大范圍的定位依舊要使用大量的RFID讀寫器,整套定位系統的組建成本就會相當高,失去可行性。
針對這種情況,提出一種新的RFID定位方法,具體來說是使用有源RFID系統,使一個RFID閱讀器的天線在定位區域中心從一個基準位置按一定角速度旋轉,然后讀取各個待定位標簽的RSSI值,根據RSSI值的大小變化的曲線得出標簽和閱讀器的距離以及相對基準位置的角度,從而實現定位。
1 改進的對數路徑損耗模型
對于RFID定位,主要就是利用閱讀器讀回的待定位標簽的RSSI值,然后根據RSSI值與距離的關系得到距離值,或者用一些算法處理得到有用的信息,然后再運用一些定位算法得到方位。
由于環境中各種因素的影響,RSSI值與距離的關系并不是一一對應的函數關系,這也是RFID定位難的主要問題之一。
1.1 對數路徑距離損耗模型
對數路徑損耗模型是一種比較常見的模型,它能夠較好地表示RSSI值與距離之間的關系,公式如下:
式中,Pt為信號的發射功率,PL(d)為標簽或RFID信號傳輸距離d時的損耗,Pr(d)為RFID信號傳輸距離d時的信號的功率強度,Xσ為噪聲,d0為參考點,n為路徑損耗指數,Xσ又被稱為陰影衰落[6]。
1.2 改進的對數路徑損耗模型
本文定位方法采用的是有源標簽發射定位信號,閱讀器讀取信號,并對接收到的信號進行相應處理,從而實現對標簽的定位操作。鑒于如今市面上識讀100m左右的RFID系統已經非常多,成本也不高,本文提出了采用有源RFID系統進行定位的方法,標簽的發射功率一般為0dbm,定位范圍為直徑100m的圓形區域,利用對數路徑損耗模型,于是有:
(1)
又由Friis公式可知:
式中,PT為RFID信號發射功率,GT為發射RFID信號的天線的增益,GR為接收RFID信號的天線的增益,c為光速,f為RFID信號的頻率[7]。再根據雷達原理可知RFID閱讀器天線方向圖可以用如下辛克函數來近似[8]:
式中,θ0為天線的零功率波束寬度。于是有(dBm表示取分貝):
(2)
根據參考文獻[8]即《基于對數距離路徑損耗模型下的路徑損耗指數研究》中的數據可知,在d=0.5 m,PT=12 dBm,f=935.4 MHz時,有n=2.699 6,Xσ~(0,26.799 33)[9]。
顯然,無論PT值為多少,在環境不變的情況下,只要d=0.5 m,f=935.4 MHz,那么依舊有n=2.699 6,Xσ~(0,26.799 33)。一般來說遠距離有源RFID系統,PT=0 dbm,GT=0 dbm,GR=12 dbi,f一般在935 MHz頻段或2.4 GHz頻段內。文中,假設使用935.4 MHz(一方面,935.4 MHz相對于來說更成熟,組建成本低;另一方面,2.4 GHz的產品性能更好,如果935.4 MHz可行,那么2.4 GHz肯定是可行的,因此本文選取935.4 MHz進行考察)。θ0對于遠距離RFID來說一般為60°~90°,本文取中間值75°。

由于Xσ~(0,26.799 33),所以:
當d=80m時,有:
若最大值在0°處,則上式的RSSI值從-180°~180°的分布大致如圖1所示(一般來說有源RFID系統的閱讀器接受靈敏度一般在-90dBm左右,所以,對于所有小于-90dBm的RSSI值統一設為-90dBm)。
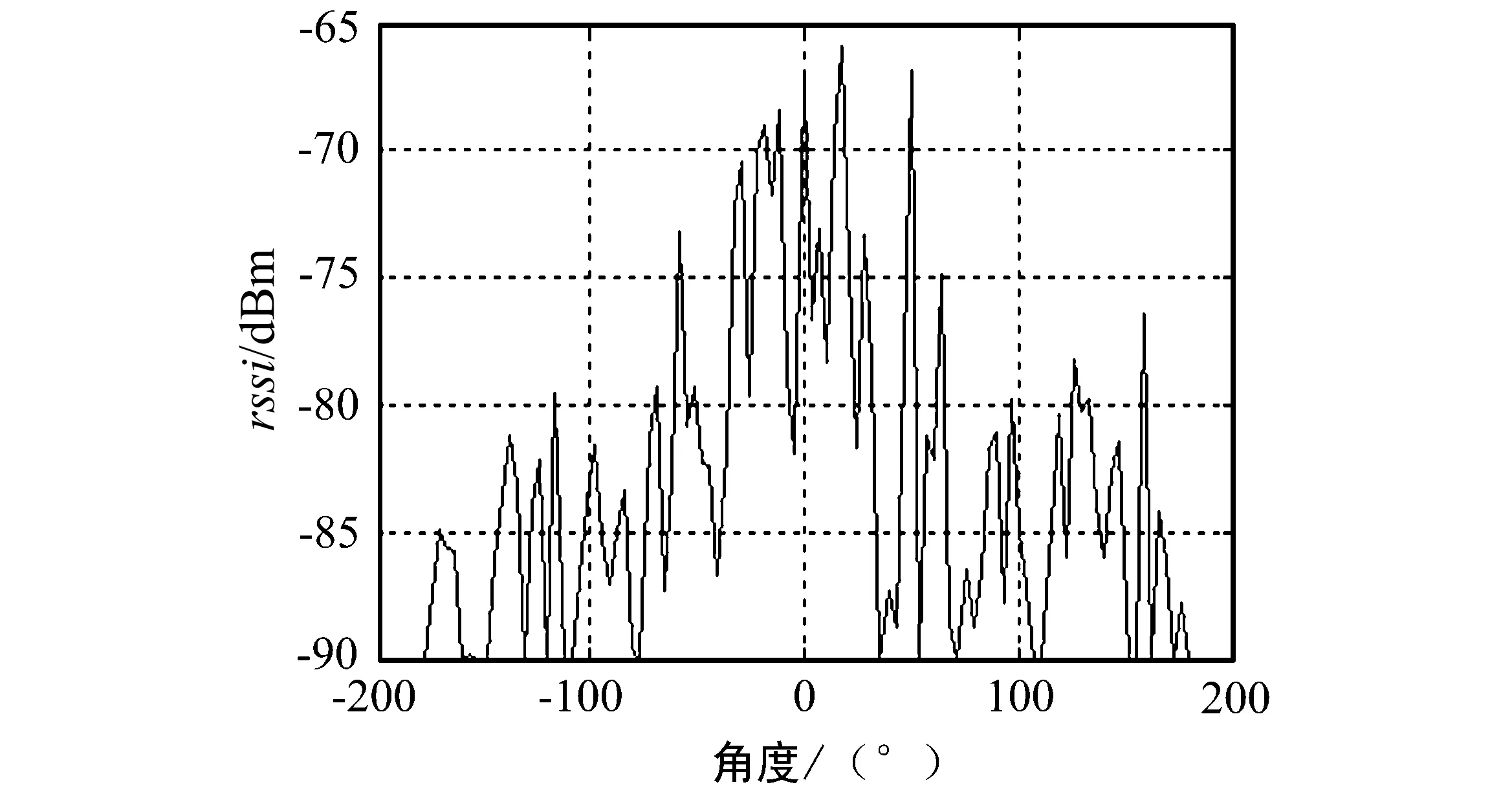
圖1 最大值在0°時的RSSI值分布圖
本文以RFID天線主軸收到的RSSI值與d的關系來求距離。當天線主軸對準標簽時,θ=0°,所以有如下RSSI與d的關系式:
PrdBm(d)=-13.841-26.996lg(2d)+Xσ,Xσ~(0,26.799 33)。
RSSI與d的關系如圖2所示。
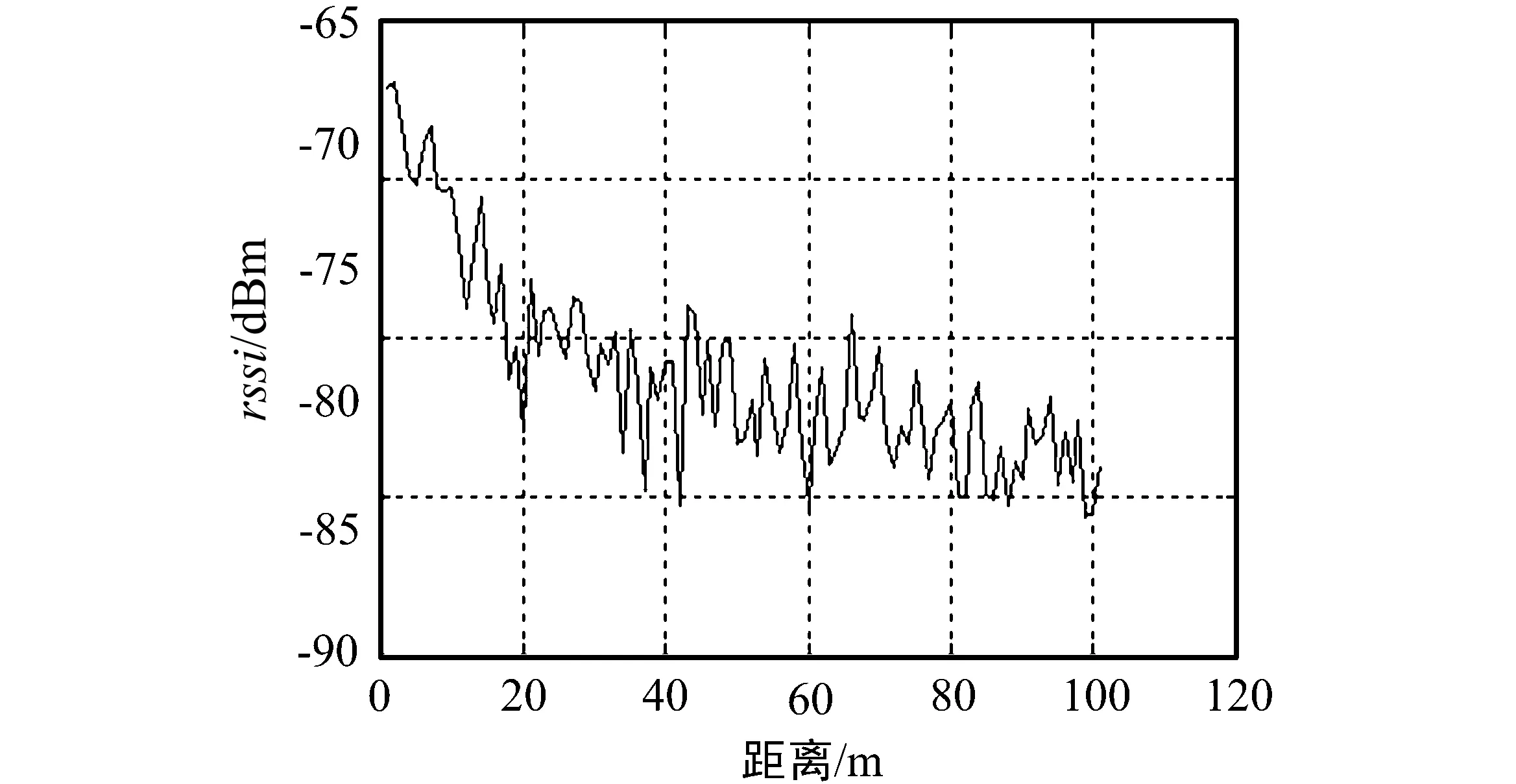
圖2 RSSI值與距離d的關系
2 利用最大值法求標簽方位
2.1 最大值法求角度
因為在RFID標簽和閱讀器正好相對時,閱讀器收到的RSSI值應該是最大的,即:若f(θ)為閱讀器旋轉一周后讀到的某RFID標簽的RSSI值函數,且f(θ0)=max(f(θ)),則θ0即為所求的角度。
本文使用matlab對最大值法進行100次試驗仿真,觀察效果如圖3所示。
雖然最大值法可以用來求得角度,但是效果并不好,大部分的結果都明顯偏離實際的角度,個別仿真結果的誤差達到了50°,甚至超過100°,接近150°,這樣的精度用來定位是不行的,明顯滿足不了實際的應用。于是,采用一種改進的最大值法來定位——先使用小波去噪的方法對采集的RSSI數據做去噪聲處理,然后再使用最大值法來求得角度。
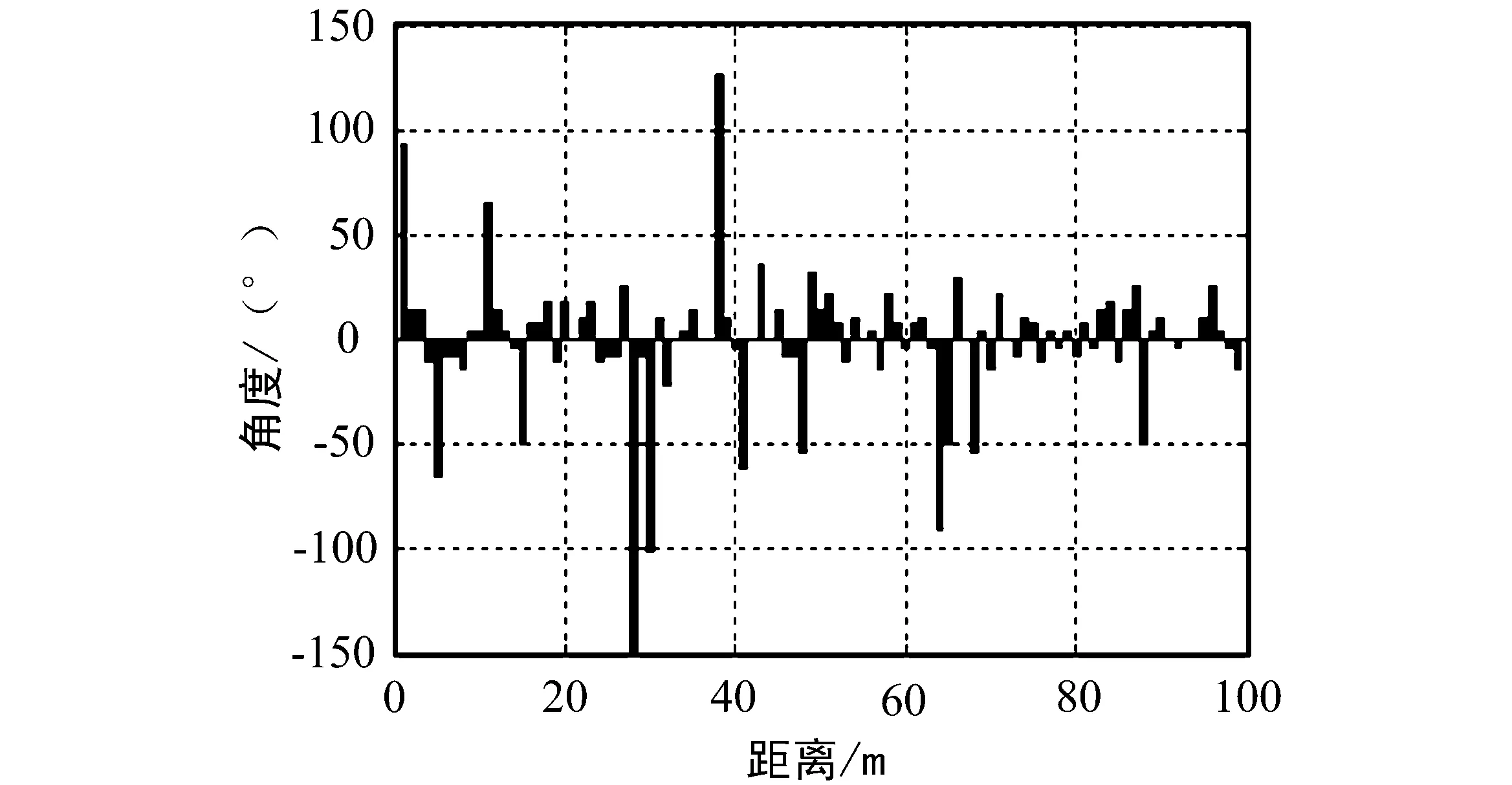
圖3 100次最大值法求角度的誤差
2.2 最大值法求距離
本文先進行100次蒙特卡羅實驗得到了d=50 m時,RSSI的平均值為-67.335 0 dbm。然后以這個RSSI值為標準,再進行100次仿真,得到距離誤差如上圖4所示。可以發現用該方法求得的距離誤差很大,顯然這個測距精度是無法滿足要求的,所以本文采用一種改進的測距方法。改進的測距方法如下:
① 進行1次蒙特卡羅實驗,得倒RSSI與距離的具體關系。然后進行小波去噪得到去除噪聲后的RSSI與距離的關系式;
② 重復①足夠次數,然后求得每個距離對應的RSSI的各次蒙特卡羅試驗的值的平均值;
③ 使用②中得倒的RSSI平均值與距離的關系式,進行仿真實驗,看效果如何。
注:在仿真實驗中求距離前,也要先使用小波去噪處理仿真得到的RSSI值。
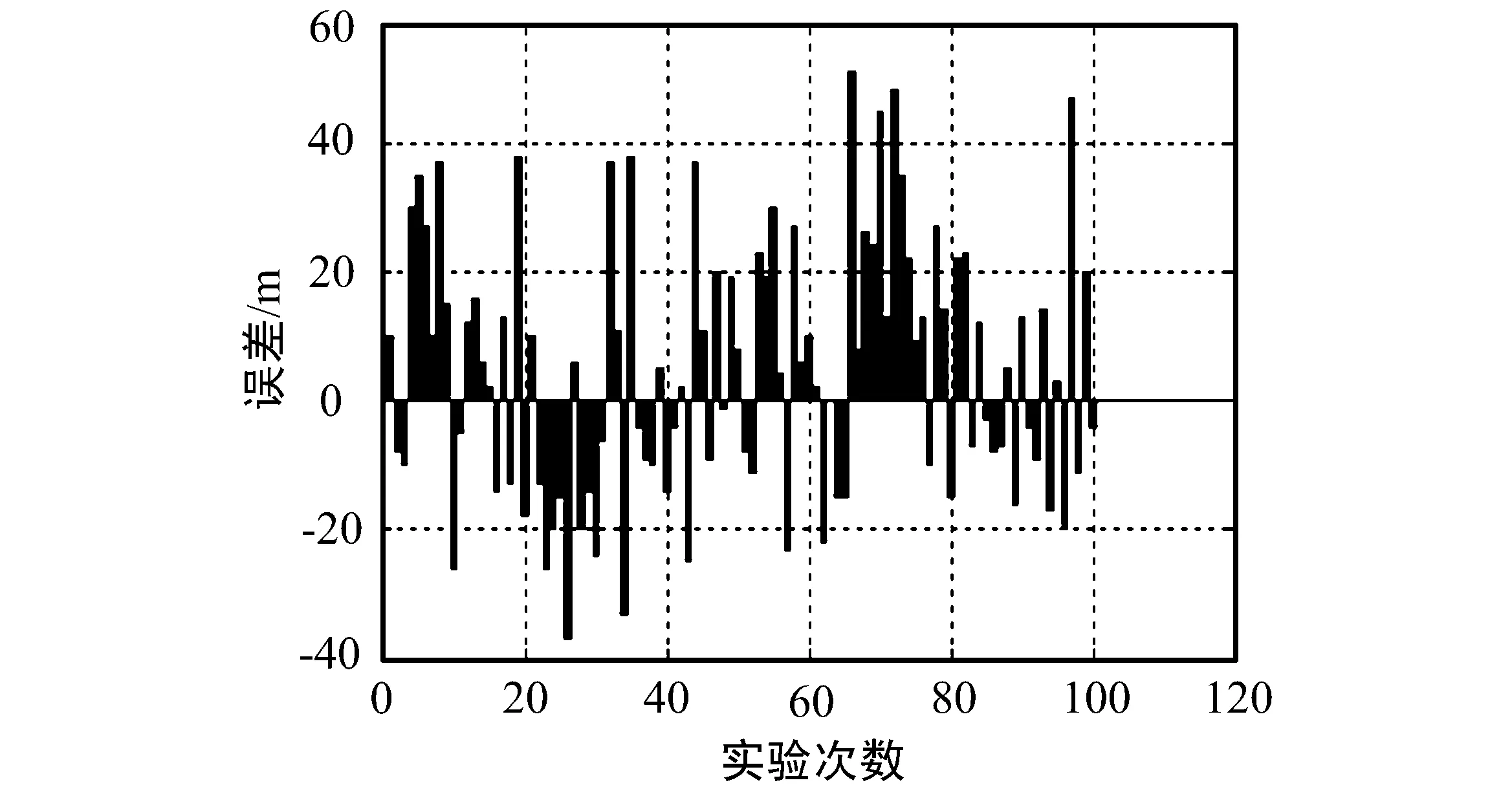
圖4 最大值法求距離的誤差
3 改進的最大值法求標簽方位
3.1 小波去噪
小波閾值去噪的過程如圖5所示,小波分解時要確定小波基以及分解層數,在閾值處理時要確定閾值λ的選取規則,以及使用何種閾值函數。

圖5 小波閾值去噪流程圖
① 小波基的選擇:一般來說dBN,symN小波是去噪中使用較多的小波基,去噪效果較為理想,在大量的仿真實驗的基礎上發現,sym5小波對于本文中的定位方法效果較好。
② 分解層數的選擇:在分解層數為2時,去噪信號最接近原信號;但是,在分解層數為4時,去噪信號雖然與原信號出現了較大的失真,但是天線信號副瓣得到了非常好的抑制,有利于定位,所以本文使用4層小波分解。
③ 閾值函數:較常見的有軟閾值函數和硬閾值函數2種,以及在此基礎上的一些變形閾值函數。一般來說,軟閾值法獲得的重構信號具有更好的光滑性,但是誤差相對較大。硬閾值方法獲得的重構信號具有更好的逼近性,但是有附加震蕩。但是,本文使用的是最大值法求角度與距離,所以,對震蕩非常敏感,故使用軟閾值函數。

3.2 仿真結果
先使用小波去噪,再用最大值法求角度與距離,對求角度的100次蒙特卡羅實驗進行分析。圖6為進行4層分解的小波去噪的仿真圖,圖7為改進最大值法求角度的誤差仿真圖(正數表示求得的角度大于實際的角度,負數表示求得的角度小于實際的角度)。
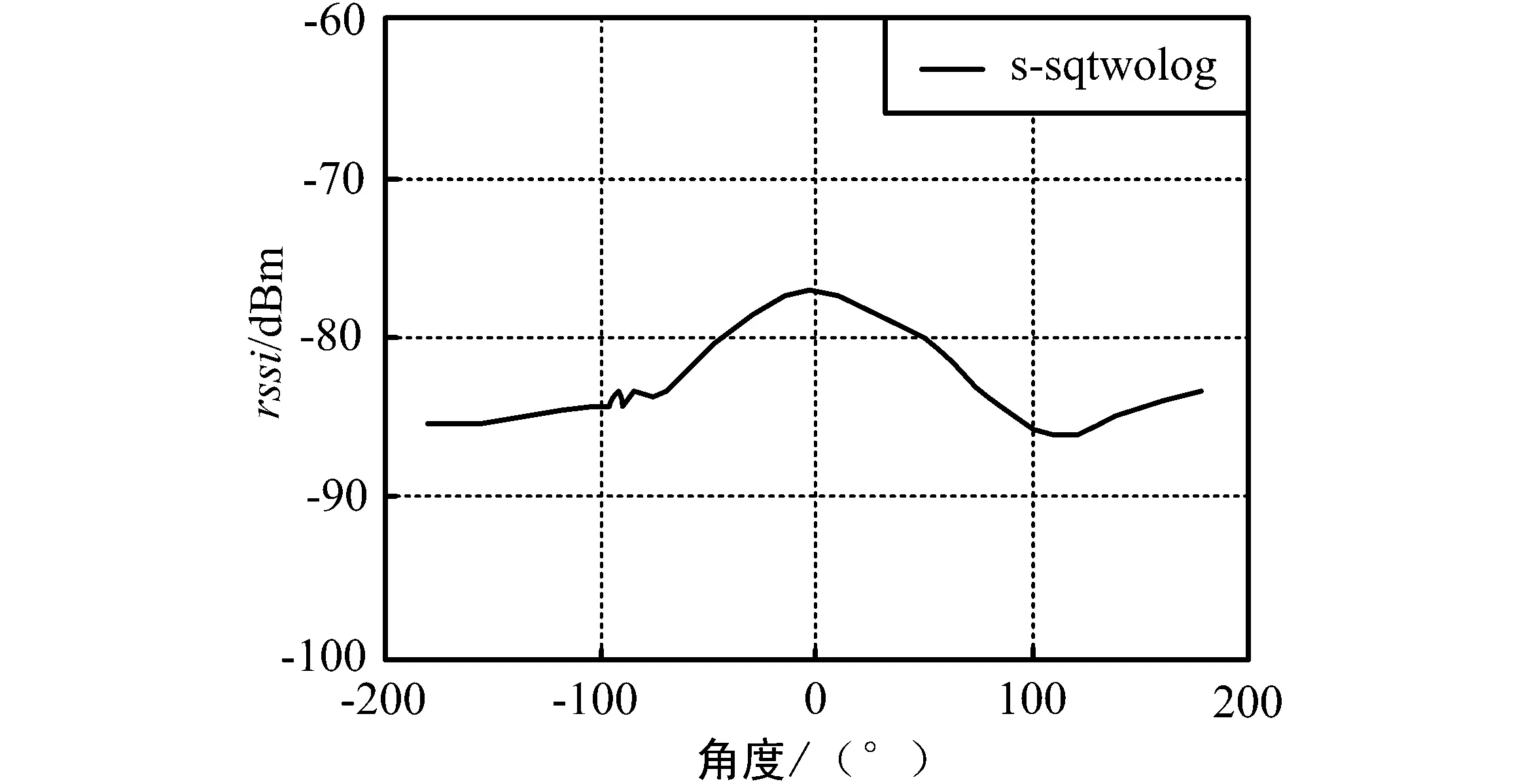
圖6 分解層數為4時的小波去噪仿真圖
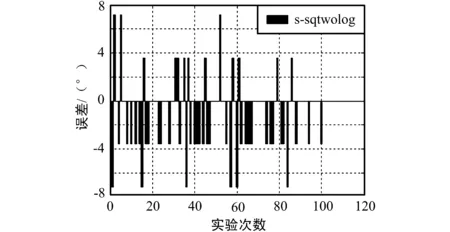
圖7 改進最大值法求角度的誤差仿真圖
可以看到使用小波閾值去噪后,求得的角度精度基本可以保持在4°以內,基本可以滿足定位精度要求不是很高的定位要求。
由圖8可以看到,經小波去噪后,RSSI與距離的關系有了較好的一一對應關系,從而可以較為準確的根據RSSI值求得距離。圖9也說明了這一點(正數表示求得的角度大于實際的角度,負數表示求得的角度小于實際的角度),可以看到,求得的距離誤差基本都在5 m之內,最大的誤差也不超過10 m,這樣對于精度要求不高的定位,是完全可以滿足的。
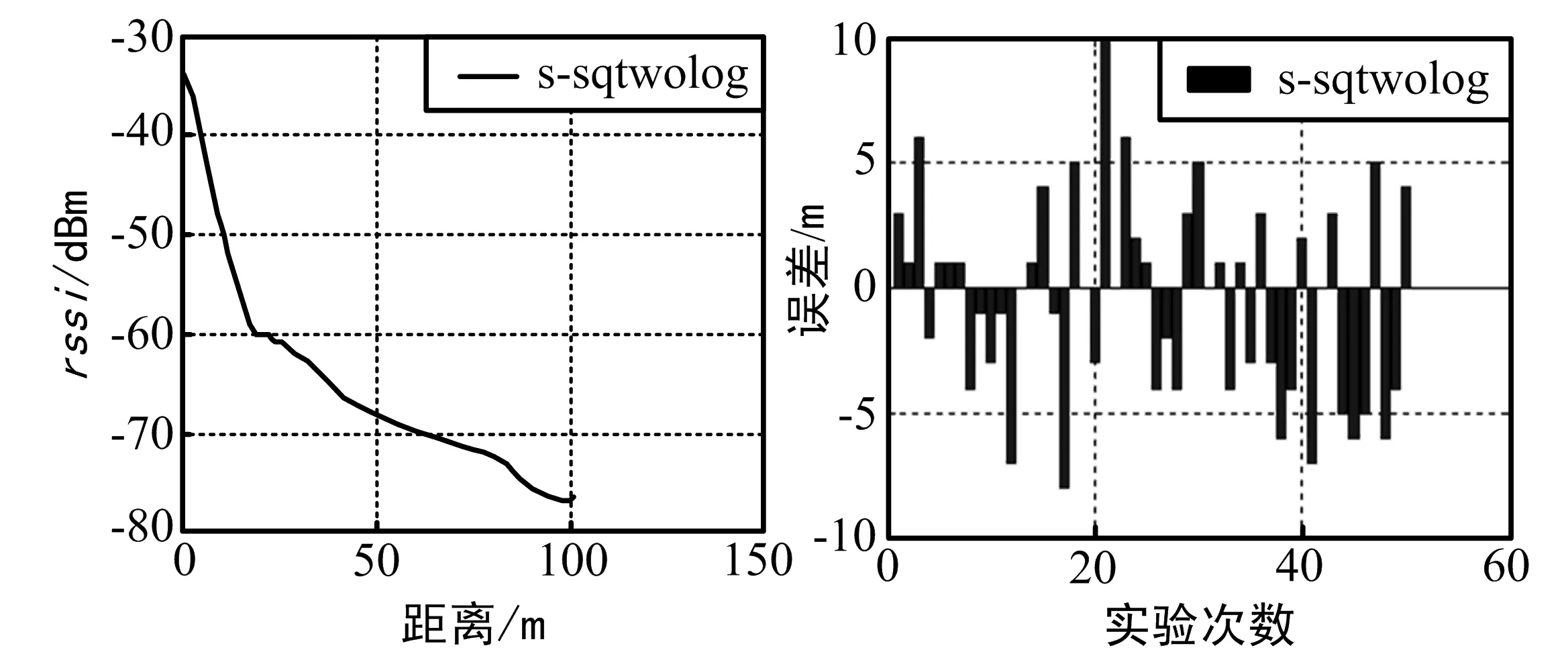
圖8 經小波去噪后RSSI與距離的關系圖 圖9 改進的最大值法求距離的誤差仿真圖
4 結束語
本文先利用路徑對數損耗模型和Friis公式建立閱讀器接收到的功率與標簽相對于閱讀器的距離以及角度的關系式,然后再使用小波去噪進行相關處理,最后利用最大值法得到角度以及距離,從而實現標簽的定位。本文提出的RFID定位方法在天線的識讀范圍內(上述實驗以100 m為例),只需要一個閱讀器即可,而LANDMARC及其大部分變形,在這個范圍內至少需要4個閱讀器加上數千個標簽,所以本方案大大降低了室外或室內大范圍定位的成本。同時,由仿真結果可以看到本方案提出的定位方法也達到了一定的精度要求,對于精度要求不高的定位,如人員定位是完全可以滿足的。另外,如何使本文提出的定位方法不再局限于模型,而是運用到實際的信道環境中,是本文下一步的研究目標。
[1] 熊廷文.基于無源超高頻射頻識別技術的實時定位系統的研究[D].上海:復旦大學,2010.
[2] Werb J,Lanzl C.Designing a Positioning System for Finding Things and People Indoors[J].IEEE Spectrum,1998,35(9):71 -78.
[3] Hightower J,Want R,Borrlello G.SpotON:An Indoor 3D Location Sensing Technology Based on RF Signal Strength[M].Seattle,USA:Department of Computer Science and Engineering,University of Washington,2000.
[4] Ni L,Liu Y,Lau Y,et al.LANDMARC:Indoor Location Sensing Using Active RFID[C]∥Proceeding of the 1st International Conference on Pervasive Computing,Texas,USA,2003:407-415.
[5] 史偉光.基于射頻識別技術的室內定位算法研究[D].天津:天津大學,2012.
[6] 張健翀.基于射頻識別(RFID)技術室內定位系統的研究[D].廣州:中山大學,2010.
[7] Rappaport T.Wireless Communications,Principle&Practice[M].USA:IEEE Press,Prentice Hall,1996.
[8] 丁鷺飛,耿富錄.雷達原理[M].西安:西安電子科技大學出版社,2002.
[9] 崔燕妮,張興輝,楊榮飛,等.基于對數距離路徑損耗模型下的路徑損耗指數研究[C]∥ 2010’全國第十三屆微波集成電路與移動通信學術會議論文集.浙江:中國電子學會,浙江省電子學會,2010:267-271.
[10]李慶華.基于小波閾值算法的信號去噪研究[D].烏魯木齊:新疆大學,2013.
An RFID-based Positioning Method
YUAN Xiao-feng,CHEN Qi
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming Yunnan 650500,China)
Now,existing RFID positioning method is only suitable for small-scale indoor positioning and the method is inconvenient.A new positioning method is proposed in this paper.At first,a reader’s antenna is arranged in the central location of the positioning region.Second,the antenna rotates by a certain angular velocity to get the signal of RSSI.Third,wavelet threshold is used to denoise the signal.At last,the maximum value method is used to calculate the angle and distance according to the signal after denoising.Due to the limited experimental conditions,the paper uses logarithmic path loss model to establish the research model based on which simulation is done.Result shows that this way can be used in indoor and outdoor large-scale positioning when very high accuracy is not required.
RFID;wavelet denoising;RSSI;location;logarithmic path loss model
10.3969/j.issn.1003-3114.2016.06.21
袁曉峰,陳 頎.一種基于RFID的定位方法[J].無線電通信技術,2016,42(6):81-85.
2016-07-25
袁曉峰(1990—),男,碩士研究生,主要研究方向:數字信號處理、嵌入式應用。陳 頎(1964—),男,碩士,副教授,主要研究方向:微波冶金控制、嵌入式應用。
TN98
A
1003-3114(2016)06-81-5
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
