一種對接機構轉子杯式電磁阻尼器設計研究
2016-12-21 08:37:10高金忠葉甲秋曾令斌
上海航天 2016年5期
關鍵詞:理論
高金忠,周 杰,葉甲秋,曾令斌
(1.上海市空間飛行器機構重點實驗室,上海201108; 2.上海宇航系統工程研究所,上海201109)
?
一種對接機構轉子杯式電磁阻尼器設計研究
高金忠1、2,周 杰1、2,葉甲秋1、2,曾令斌1、2
(1.上海市空間飛行器機構重點實驗室,上海201108; 2.上海宇航系統工程研究所,上海201109)
為適應不同方向對接耗能量大幅增加的狀況,對一種空間對接機構耗能用轉子杯式電磁阻尼器的設計進行了研究。在一定的簡化條件下,建立了轉子杯式電磁阻尼器阻尼力矩特性的理論計算模型。阻尼器材料選用釹鐵硼、不銹鋼和硬鋁。對阻力器陽極的力矩特性進行了理論計算并與仿真比較,兩者相近,表明理論計算模型較準確地反映了阻尼器各設計參數對阻尼力矩特性的影響,但理論計算值仍與樣機實測結果存在一定偏差。用多輪迭代修正方式,對轉子杯的參數進行調整,并考慮了由此產生的氣隙厚度對漏磁的影響,獲得了修正的阻尼器阻尼力矩計算公式。結果表明:在轉速0~500 r/min范圍內,阻尼力矩與轉速實測值呈良好的線性關系,阻尼器產品實際測試結果與修正后的理論模型計算值基本一致。
對接機構; 耗能機構; 轉子杯式電磁阻尼器; 阻尼力矩; 氣隙磁密; 力矩特性; 迭代修正; 樣機
0 引言
空間站工程中要求各飛行器分別從后向、前向和徑向完成與空間站的交會對接,涉及的工況條件相當復雜,對接機構需消耗的能量較載人航天二期工程工況有大幅增加。原對接機構俯仰、偏航方向的阻尼器系數較低,當進行大噸位對接時,在捕獲后,俯仰、偏航向的殘余能量不能被很快吸收,導致對接環轉角大幅增大,甚至破壞傳動鏈。因此,對接機構須在現有基礎上增加可控式耗能機構消耗俯仰和偏航向的對接能量,以滿足各種空間站工程大噸位對接的需求。可控式耗能機構在兩飛行器捕獲前不工作,對接機構緩沖系統剛度保持原有的“軟”特性,以保證在足夠低的捕獲速度下能順利完成捕獲;當兩飛行器捕獲后可控阻尼器開啟,對接機構緩沖系統變“硬”,利用內部的電磁阻尼器快速有效地緩沖、消耗碰撞后的能量。電磁阻尼器屬于機電阻尼類的線性緩沖器,其阻尼力矩與緩沖器轉速成線性關系,具利于對接機構的力學特性,如滿意的恢復系數和覆蓋系數,同時該類型阻尼器又有極好的空間環境適應性,是空間緩沖耗能機構的最佳選擇。目前,關于轉子杯式電磁阻尼器研究的文獻較少,前蘇聯在其空間對接機構中應用了該類型的電磁阻尼器,而美國在太陽電池陣展開機構、太陽遮光罩展開機構等航天產品中也應用了該類型的電磁阻尼器,但對其具體設計方法并無詳細介紹[1-4]。國內哈爾濱工業大學、西北工業大學等對電磁阻尼器進行了研究,推導了阻尼力矩特性的理論計算公式,但對其理論計算方法缺乏充分的試驗驗證,用其計算方法設計的阻尼器性能與實際試驗結果存在較大偏差[5-8]。工程上急需一種有效的轉子杯式電磁阻尼器阻尼力矩特性設計方法。為此,本文基于轉子杯式電磁阻尼器的工作原理,建立了阻尼器力矩特性的理論計算模型,在理論計算和仿真分析的基礎上,根據多輪樣機試驗數值對阻尼力矩特性理論計算模型進行多次迭代修正,以獲得一種較準確的轉子杯式電磁阻尼器阻尼力矩特性理論計算模型。
1 阻尼力矩特性理論分析
轉子杯式電磁阻尼器由外定子、內定子、轉子和磁鋼等組成,結構如圖1所示。其中:內定子和外定子為導磁材料,轉子為導電材料。工作原理為:當轉子被外界原動機驅動在由磁鋼產生的氣隙磁場中旋轉時,轉子表面會感應產生電渦流,電渦流與磁場相互作用,產生阻止轉子旋轉的阻尼力矩。阻尼器轉速與轉矩的關系稱為阻尼力矩特性,阻尼力矩特性是電磁阻尼器最重要的外特性,是阻尼器吸收與耗散能量水平的表征。
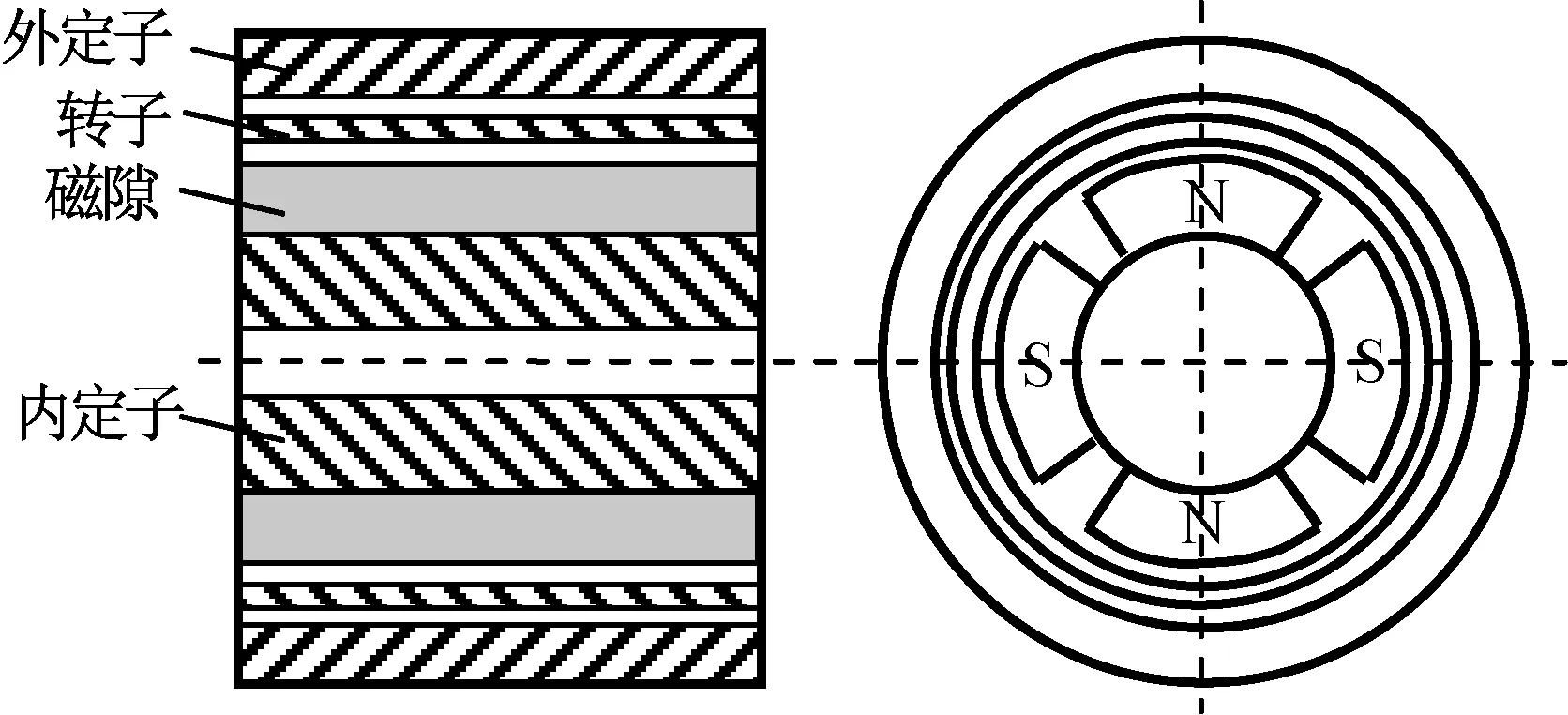
圖1 阻尼器結構Fig.1 Structure of eddy current damper
為便于分析,本文作簡化處理:不考慮阻尼器端部漏磁;轉子杯渦流沿轉子軸呈矩形分布;忽略轉子電感;對未考慮的問題在理論計算公式中歸為阻尼器修正系數。
轉子杯轉動時,兩對極電磁阻尼器表面產生的電渦流瞬時如圖2所示。
轉子杯在定子磁場中受到電磁力
F=BIl.
(1)
式中:B為磁場的磁感應強度;I為轉子杯中流過的電流(渦流);l為轉子杯長度。
阻尼器電樞感應渦流為
(2)
式中:e為感應電動勢;v為轉子杯線速度;R為電樞電阻。
可得電磁力、電磁轉矩和轉子表面線速度分別為
(3)

(4)
v=πDn/60.
(5)
T與轉子轉速n的關系可表示為
(6)
每對極下轉子杯有效長度部分電阻為

(7)

(8)
式中:B為氣隙磁場磁感應強度;l為轉子杯有效長度;D為轉子杯直徑(薄壁件,取中徑);δ為轉子杯厚度;P為磁極對數;ρ為電阻率。
根據阻尼器磁力線走向建立阻尼器的等效磁路(如圖3所示),計算B(只計算1/4磁路,阻尼器磁路對稱分布)[9]。
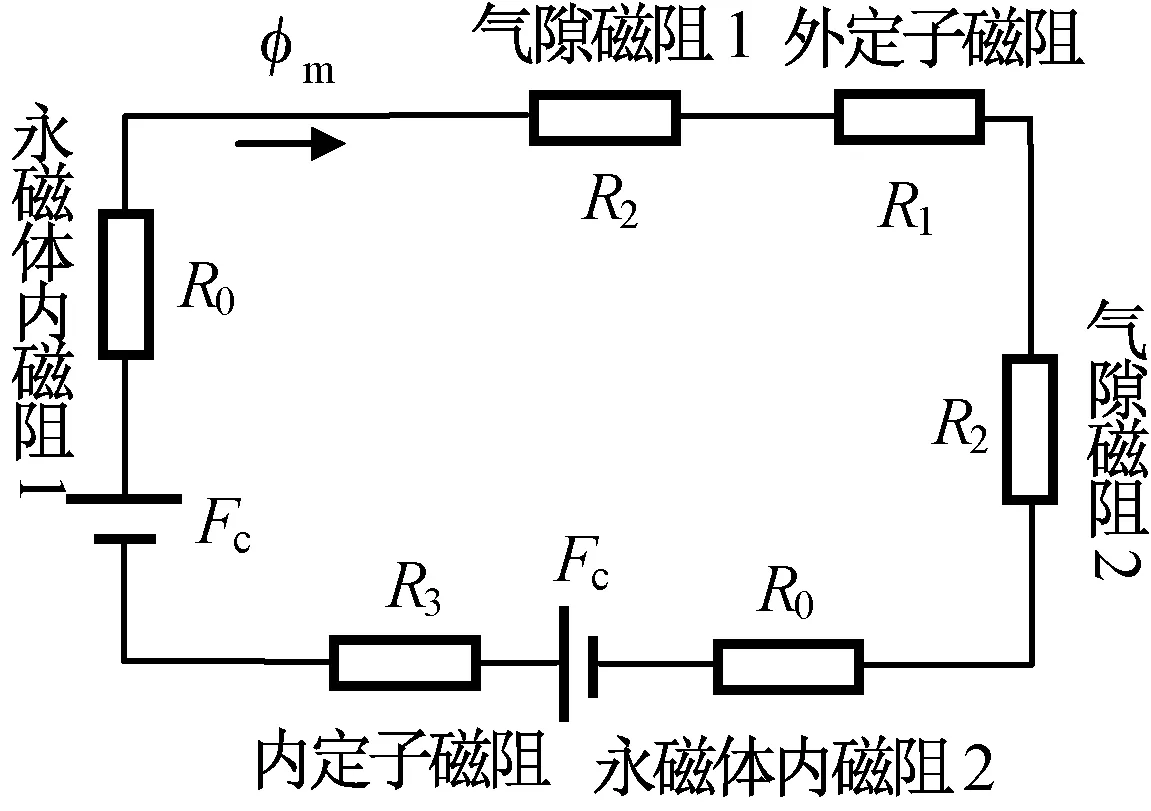
圖3 阻尼器等效磁路Fig.3 Equivalent magnetic circuit of eddy current damper
對給定性能和尺寸的永磁體,其磁動勢Fc為常數,有
Fc=Hchm.
(9)
式中:Hc為永磁體矯頑力;hm為永磁體磁化方向長度(即永磁體厚度)。
分別計算磁路中各段的磁阻,永磁體內阻R0,外定子磁阻R1,氣隙磁阻R2,內定子磁阻R3。
磁阻計算公式為
(10)
式中:μr為材料的相對磁導率;μ0為真空磁導率;hi為磁路長度;Si為導磁面積。其中內定子和外定子材料相對磁導率隨磁場強度而變。
由式(10)可求得磁路總氣隙磁阻∑R。整個磁路磁通
(11)
磁路各處磁感應強度
Bi=φ/Si.
(12)
由式(9)~(12)可推導出電磁阻尼器氣隙磁場
(13)
式中:S2為氣隙導磁面積。
將式(13)代入式(8),得T,n的關系式為
(14)
2 阻尼器材料選取
為減小產品體積和重量,選取磁性能強、矯頑力大、溫度系數低的高性能稀土永磁體N33UH釹鐵硼,其剩磁>1.17 T,矯頑力>876 kA/m。
為減小產品體積和重量,機殼及定子材料選用導磁性能強、機加工性能好的材料,DT4E為最佳。因電工純鐵機殼表面不進行鍍鎳等處理會出現生銹現象,且即使進行了防銹處理,生銹隱患仍存在,故選用磁性能稍差但防銹性能較好的2Cr13作為機殼和內定子材料。對2Cr13進行適當熱處理,可使磁感應強度大于1.45 T。
為使轉子既具較大電導率,又有較小密度,在降低轉子轉動慣量的同時還有較好的機加工性能,選擇硬鋁2A12。與銅96相比,硬鋁2A12的導電性稍差,但其密度小、比熱容大,非常適合用于阻尼器的轉子。銅96的電阻率為0.030 7 μΩ·m,硬鋁2A12的電阻率0.043 5 μΩ·m,由式(14)可知:對相同體積的轉子杯,鋁質轉子杯的阻尼力僅為銅質轉子杯的70%,但銅的密度為8 700 kg/m3,鋁的密度為2 700 kg/m3,相同體積的鋁轉子慣量幾乎為銅轉子的1/3,同時鋁的比熱容為0.88 kJ/(kg·℃),銅的比熱容為0.39 kJ/(kg·℃),相同質量的轉子杯吸收相同的能量,銅杯的溫升為鋁杯的2.56倍。綜合考慮選取硬鋁2A12作為轉子杯材料。
3 阻尼力矩特性理論計算與仿真分析
用本文推得的理論計算式(14)對轉子杯式電磁阻尼器樣機進行理論計算。由式(14)可知:阻尼力矩的大小與轉子杯轉速呈線性關系,因此只需計算某一轉速下的阻尼力矩,即可獲得阻尼器的阻尼力矩特性。
將樣機設計參數代入理論計算公式,計算得氣隙磁場處的平均氣隙磁密為0.64 T,阻尼器轉速在500 r/min時其阻尼力矩為2.911 N·m。
根據樣機設計參數,用電磁場仿真軟件對轉子杯式電磁阻尼器進行動態仿真,計算氣隙磁密及不同轉速下的阻尼力矩。
轉子杯式電磁阻尼器橫截面及磁力線走向如圖4所示。阻尼器靜態氣隙磁密如圖5所示。阻尼器動態氣隙磁密如圖6所示。
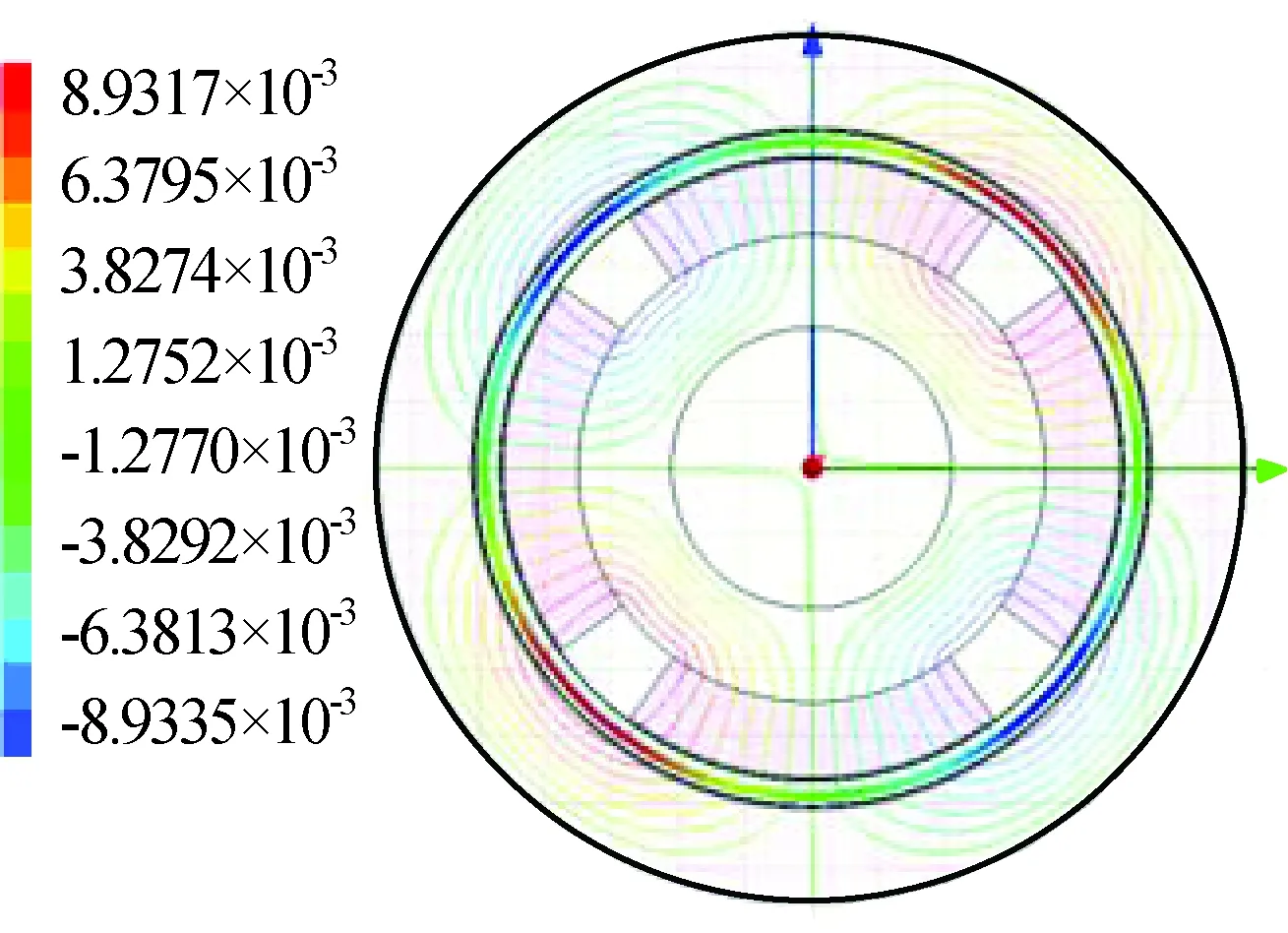
圖4 阻尼器磁力線走向Fig.4 Magnetic line of eddy current damper
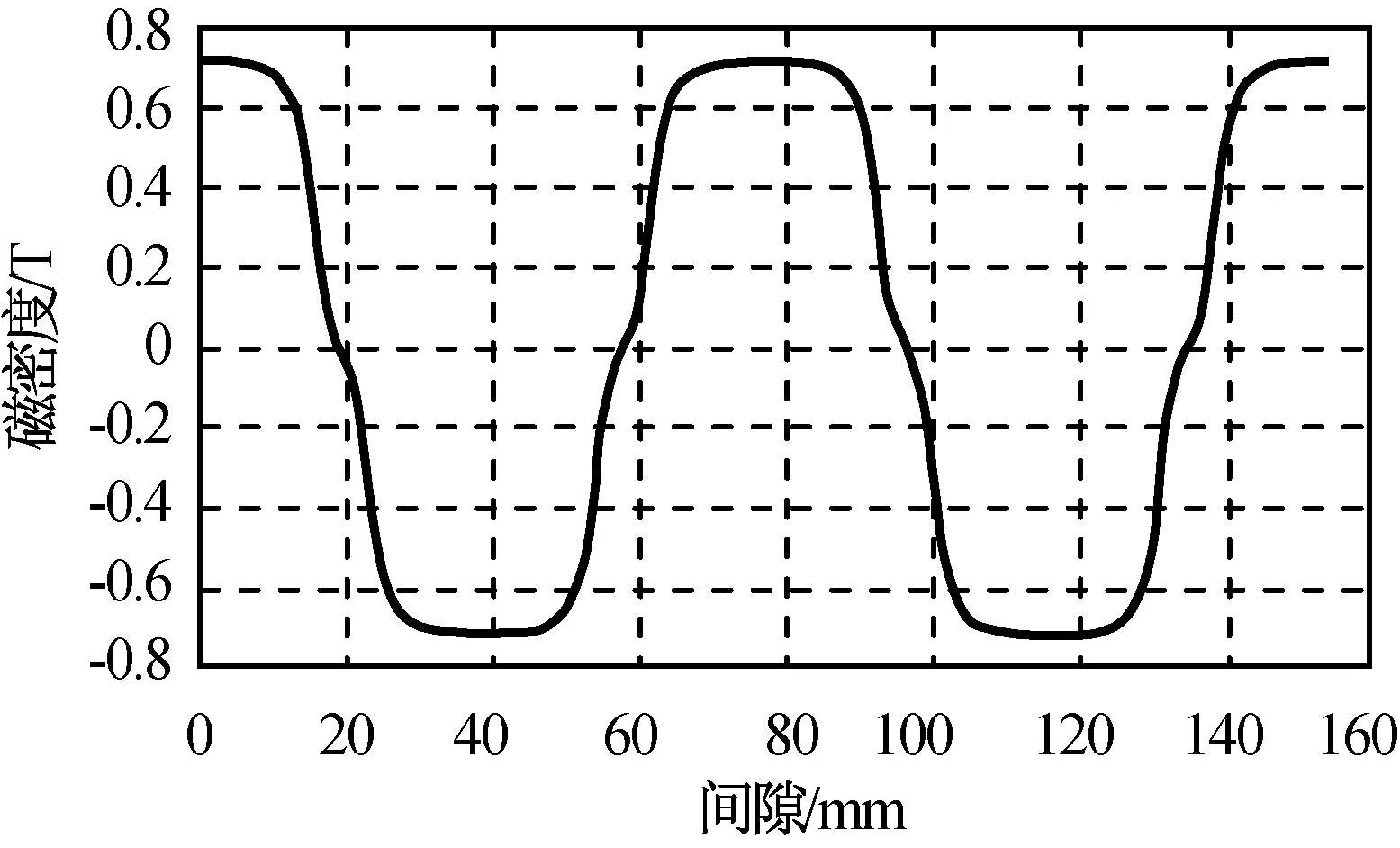
圖5 阻尼器靜態氣隙磁密Fig.5 Static magnetic density of air gap of eddy current damper
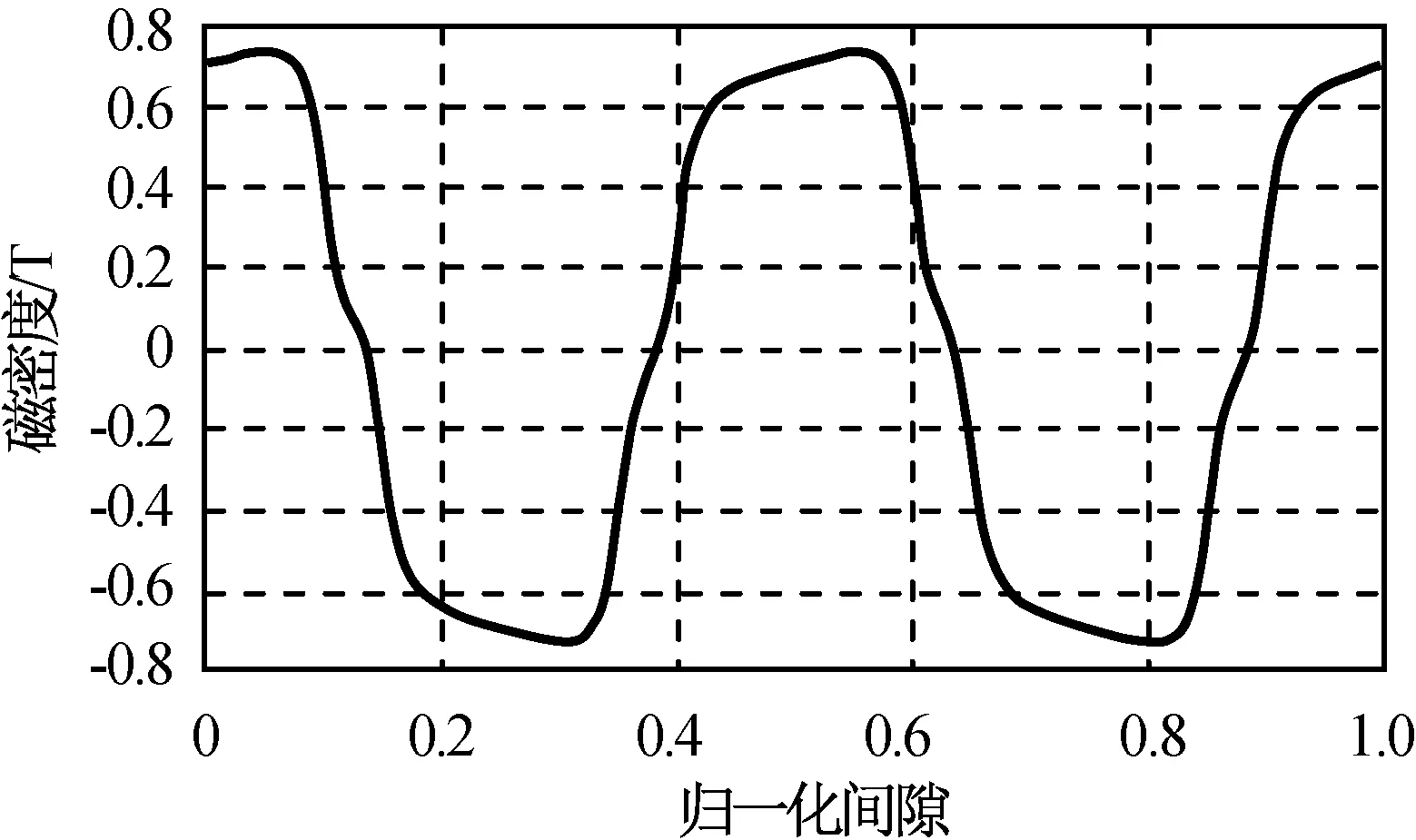
圖6 阻尼器動態氣隙磁密Fig.6 Dynamic magnetic density of air gap of eddy current damper
由圖6可知:雖然動態氣隙磁密受感應渦流產生二次磁場的影響而發生氣隙磁場畸變,使磁密一側增大,一側減小,但平均氣隙磁密并未發生變化,平均氣隙磁密絕對值與靜態磁密平均值基本保持一致,約0.68 T。
轉子轉速為500 r/min時阻尼器力矩仿真結果為3.31 N·m,如圖7所示。
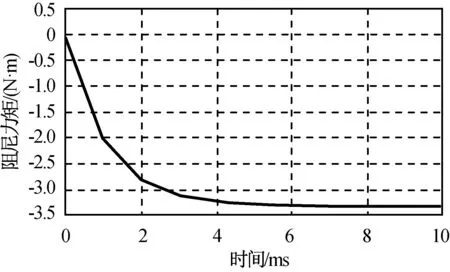
圖7 轉速500 r/min時阻尼器阻尼力矩Fig.7 Damping torque of eddy current damper with rotor speed 500 r/min
將轉子杯式阻尼器的理論計算值與仿真結果進行比較,阻尼力矩(理論計算值2.911 N·m,仿真結果3.31 N·m)基本一致;平均氣隙磁密計算結果(理論計算值0.64 T,仿真結果0.68 T)也基本一致,表明理論分析結果一定程度上反映了阻尼器各參數對阻尼力矩特性的影響。
因上述研究主要基于二維截面下的穩態運行,并對磁路進行了簡化,而實際上阻尼器工作情況極其復雜,涉及瞬態的渦流場、端部漏磁、阻尼器三維結構、各材料實際性能參數與理論值間差異等,理論結果需根據大量試驗結果進行修正。
4 樣機測試結果與理論計算比對分析及修正
根據仿真所用的設計參數對轉子杯式電磁阻尼器樣機進行投產并測試,經測試樣機所得500 r/min時阻尼力矩為1.76 N·m,而由理論計算在二維情況下阻尼力矩為2.911 N·m,兩者偏差較大。為此,本文對阻尼器阻尼力矩實測值與理論值偏差的原因進行分析。
首先考慮材料性能與理論計算時取值的一致性。阻尼器所用磁鋼磁性能經入廠復驗,磁性能與理論計算取值一致,滿足要求;內外定子磁性能處理結果與理論計算取值一致,滿足要求,由此將問題定位于轉子杯的電導率是否與理論取值一致。轉子杯屬于鋁合金薄壁件,在加工過程中需進行時效處理,防止應力集中而變形。不同的時效處理(時效溫度及時間)會導致鋁合金材料的電阻率與理論值不一致[10]。對樣機所用鋁合金材料的電阻率進行實測,結果為5.6×10-8Ω·m,而理論計算中所用電阻率為4.35×10-8Ω·m,兩者差異較大。將鋁合金電阻率實測值代入理論計算公式(式14),算得阻尼力矩為2.26 N·m,實際阻尼力矩值為理論計算力矩值的0.78倍,由此排除材料實際性能與理論值不一致的原因。
對該結構的阻尼器,考慮理論模型與實際的差異,可在理論推導計算公式的基礎上增加1個大小為0.78的修正系數K。則修正后的阻尼器阻尼力矩理論計算公式為
(15)
根據樣機測試結果,力矩性能指標不能滿足要求,為此對阻尼器部分參數進行調整。由式(15)可知:在阻尼器長度和包絡外徑不變時,只能通過增大轉子杯厚度使轉子電阻減小或增加B以增大阻尼力矩。轉子杯厚度的增加會導致氣隙長度增大,使整個磁路的磁阻進一步增加,使B略微減小。
將原轉子杯的δ由1.4 mm增至1.8 mm,空氣隙hk由原來的2 mm增至2.4 mm,其余參數做適應性調整,用式(15)計算調整后的阻尼力矩(所用轉子電導率為實測值),得轉子轉速為500 r/min時,阻尼力矩為2.311 N·m。樣機返修后重新測試,測得其阻尼力矩為2.17 N·m,較修正后的理論計算值偏小。分析發現,其原因是隨著阻尼器氣隙的增大(由原來的hk1=2.0 mm增大為hk2=2.4 mm),其中氣隙磁場邊緣的漏磁也隨之增大,導致氣隙磁密較理論計算值偏小。
因此,根據前后兩次試驗值再次對阻尼器的理論計算公式進行修正,增加了氣隙厚度對漏磁的影響部分。將電磁鐵吸力計算中考慮氣隙漏磁的經驗公式引入理論計算,除增加K外另增加一項1/(1+ahk),此處a為修正系數。則有
(16)
由式(16),可得K=1.13,a=225。這樣,阻尼器阻尼力矩理論計算公式修正為
因僅對轉子杯尺寸進行調整后的阻尼器性能仍不能滿足要求,在保持轉子杯厚度不變條件下,更換磁性能更強的釹鐵硼N38UH,剩磁>1.30 T,矯頑力>900 kA/m。用式(17)求得其理論計算值為2.52 N·m。
按重新確定的設計參數,研制了5套電磁阻尼器并進行測試,阻尼器工作轉速500 r/min時阻尼力矩分別為2.48,2.55,2.60,2.58,2.42 N·m(在2.42~2.6 N·m 范圍內),在轉速0~500 r/min范圍內,阻尼力矩與轉速實測值具有良好的線性關系,產品實測結果與修正后的理論計算結果基本保持一致。
5 結束語
本文以對接機構耗能用轉子杯式電磁阻尼器為研究對象,推導了轉子杯式電磁阻尼器阻尼力矩特性的理論計算模型,并對電磁阻尼器阻尼力矩特性進行了仿真分析。在理論計算和仿真分析的基礎上,通過多輪轉子杯式電磁阻尼器樣機試驗結果對阻尼力矩特性的理論計算模型進行迭代修正,獲得了影響轉子杯式電磁阻尼器阻尼力矩特性的敏感設計參數,為今后同類型電磁阻尼器的設計、研發、制造提供了一定的理論基礎。后續考慮在轉子杯式電磁阻尼器的基礎上對盤式電磁阻尼器進行研究。電磁阻尼器具有較大能耗比、良好空間環境適應性等優點,可推廣用于我國空間展開機構等其他航天產品。
[1] STARINS N J. Eddy current damper simulation and modeling[C]// Proceedings of the 9th European Space Mechanisms and Tribology Symposium. Liege: ESA/ESTEC, 2001: 480, 321-326.
[2] 徐青華, 劉立平. 航天器展開機構阻尼器技術概述[J]. 航天器環境工程, 2007, 24(4): 239-243.
[3] 寇寶泉, 金銀錫, 張赫, 等. 電磁阻尼器的發展現狀及應用前景[J]. 中國電機工程學報, 2015, 35(12): 3132-3143.
[4] WANG X, WANG D. Calculation of eddy current loss and thermal analysis for adjustable permanent magnetic coupler[C]// Proceedings of International Conference on Electronic & Mechanical Engineering and Information Technology. Harbin: IEEE, 2011: 4405-4408.
[5] 趙陽, 曹喜濱, 徐玉如. 空間對接機構電磁阻尼器參數優化設計研究[J]. 空間科學學報, 2000, 20(10): 366-372.
[6] 王有林, 劉景林. 電磁阻尼器設計研究[J]. 西北工業大學學報, 2006, 24(3): 358-361.
[7] 羅玲, 王燕芳, 劉景林, 等. 電磁阻尼器靜態氣隙磁場的三維仿真分析[J]. 微特電機, 2009(2): 4-5+22.
[8] 楊菲菲. 電磁阻尼器力矩特性的仿真研究[D]. 西安: 西北工業大學學報, 2007.
[9] 唐任遠. 現代永磁電機理論與設計[M]. 北京: 機械工業出版社, 2016.
[10] 石峰, 王煜, 葉朋飛, 等. 6063鋁合金導電軌的電導率與生產工藝關系的研究[J]. 輕合金加工技術, 2009, 37(10): 42-43.
Research of an Eddy Current Damper Design for Docking Mechanism
GAO Jin-zhong1, 2, ZHOU Jie1, 2, YE Jia-qiu1, 2, ZENG Ling-bin1, 2
(1. Shanghai Key Laboratory of Spacecraft Mechanism, Shanghai 201108, China; 2. Aerospace System Engineering Shanghai, Shanghai 201109, China)
An eddy current damper with high torque capacity has been developed as an energy absorption device for space docking mechanism to adapt energy absorption increasing greatly during docking in this paper. Theoretical model of torque-speed characteristic for eddy current damper was established with certain simplified conditions. NdFeB magnet, stainless steel and duralumin were selected as the materials of eddy current damper. The theoretical computation of the torque-speed characteristic for the damper was carried out and compared to the simulation value. It showed that the results of computation and simulation were similar, which meant the theory model characterized the influence of various parameters of the damper on the torque-speed characteristic correctly. But the computation results were still different from the test value of the prototype. The damper’s parameters were adjusted through multiple iteration modification, and the relative effect of air-gap thickness on the magnetic leakage was in consideration. The modified computation equation of damping torque for the damper was obtained at last. The results showed that the damping torque had linearity relationship with the rotation speed measured in the scope of rotation speed from 0~500 r/min. The test results of the prototypes were agreed with the computation values through modified model.
Docking mechanism; Energy dissipation mechanism; Eddy current damper; Damping torque; Air-gap flux density; Torque-speed characteristic; Iteration modification; Prototype
1006-1630(2016)05-0023-06
2016-09-04;
2016-09-29
國家自然科學基金資助(51505295)
高金忠(1985—),男,碩士,主要研究方向為空間機構設計。
TM359.4
A
10.19328/j.cnki.1006-1630.2016.05.004
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
讀與寫·教育教學版(2017年10期)2017-11-10 22:28:57
大電機技術(2017年3期)2017-06-05 09:36:02
廣州大學學報(社會科學版)(2016年1期)2016-06-24 09:46:02
區域經濟評論(2016年2期)2016-05-17 05:06:43
學習月刊(2015年21期)2015-07-11 01:51:44
社會生活探索(2013年0期)2013-10-24 03:44:40
