一種基于PLC的堆垛機控制系統設計
2016-12-21 06:27:11劉琳霞吳佳
河南科技 2016年21期
關鍵詞:變頻器
劉琳霞 吳佳
(蘇州健雄職業技術學院機電工程系,江蘇太倉 215400)
一種基于PLC的堆垛機控制系統設計
劉琳霞 吳佳
(蘇州健雄職業技術學院機電工程系,江蘇太倉 215400)
堆垛機是自動化立體倉庫系統中的重要組成部分。基于此,根據立體倉庫系統的特點,給出堆垛機提升、行走、取料等部分的結構,提出一種通過伺服定位來實現精確位置控制的堆垛機控制系統。該系統結構簡單、定位準確、安全性高,有一定的應用前景。
自動化倉庫;PLC;伺服位置控制;HMI;安全
自動化立體倉庫在現代物流企業和現代制造企業中是非常重要的一環,相比較傳統倉庫現代化立體倉庫,土地使用面積大量減少,空間利用率高,采用先進的計算機控制,存取貨物的效率高。堆垛機作為自動化立體化倉庫中執行機構,起著非常重要的作用,貨物的進庫、出庫運輸都需要堆垛機來完成,是自動化立體倉庫的核心部件[1]。
1 堆垛機機械結構選擇
堆垛機的結構示意圖如圖1所示,本堆垛機結構采用單立柱的結構方式,堆垛機的提升運動和行走運動分別由2臺伺服電機控制,實現了精準定位,貨叉通過氣動控制來實現其取貨和送貨動作[2]。
2 堆垛機控制系統功能
堆垛機運行模式分為手動模式和自動模式2種。手動模式中可以通過操作不同的控制按鈕,來實現堆垛機的行走、提升和取送貨等動作。手動模式下可以實現對自動化立體倉庫中任何無貨倉位的送貨操作,也可以實現對有貨倉位的取貨操作。
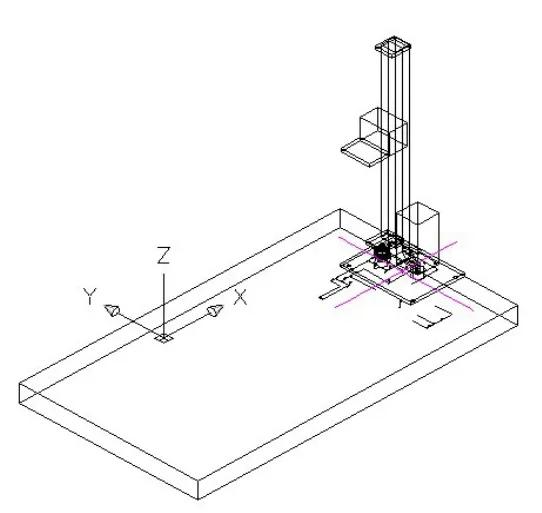
圖1 堆垛機結構示意圖
堆垛機在自動運行模式下可以實現以下的基本功能(控制流程圖如圖2所示):①工作任務可以由上位機控制或操作人員實現單循環或連續操作;②系統運行后,堆垛機的行走運動電機和升降運動電機可同時動作,到達目標貨倉時,減速停車,行走和升降運動由伺服電機帶動,可以實現精確定位;③整個運行過程中速度分為4段:取貨時低速運行,中間階段快速運行,接近目標倉位時再低速運行,返回時快速運行[3,4]。
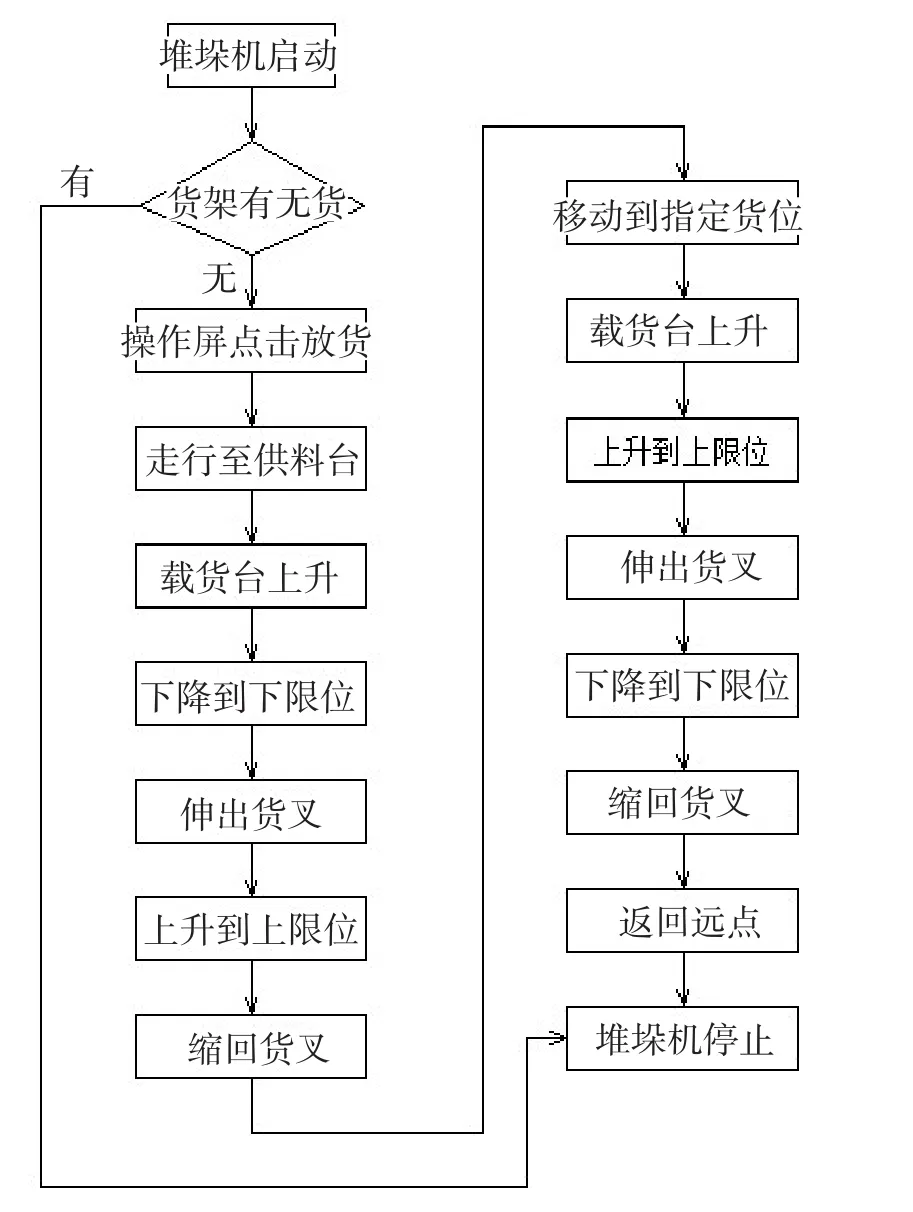
圖2 控制流程圖
3 控制系統設計
硬件中本控制系統采用伺服電機進行精確定位,程序設計中本系統采用表指令對立體化倉庫各個貨位進貨出貨進行數據記錄。定位和數據記錄可靠性高,因此未在各個倉位安裝物料檢測傳感器,節省了I/O點數。
本文中的自動化立體倉庫共3層,每層含6個倉位,共18個倉位,行走和升降運動各使用1臺伺服電機控制,取送貨的貨叉由氣缸控制。綜上因素,本文中的控制器選擇西門子公司的CPU224xp,本款PLC共有DI 14個和DO 10個,能夠滿足點數的數量要求。
輸入信號方面,行走方向設置3個傳感器,分別是原點、左限位、右限位;升降方向設置了3個傳感器,分別是原點、上限位、下限位;輸出方面,行走伺服電機用到高速輸出脈沖和方向信號2個輸出點,升降伺服電機用到高速輸出脈沖和方向信號2個輸出點,貨叉用到2個輸出點。CPU224xp接線圖如圖3所示。
本項目中采用伺服電機進行運動控制,因此要使用到PLC的高速脈沖輸出功能,本例中采用脈沖輸出MAP庫文件來實現脈沖輸出。
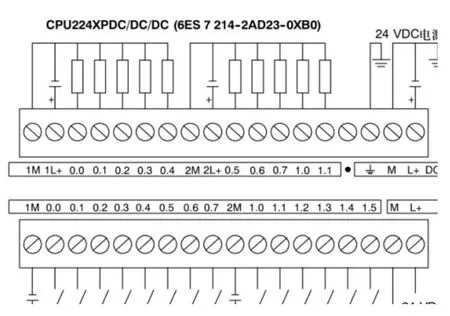
圖3 CPU224xpPLC接線圖
S7-200的內置脈沖串輸出提供了2個數字輸出通道(Q0.0和Q0.1),該數字輸出可以通過位控向導組態為PWM或PTO的輸出。當組態一個輸出為PTO操作時,生成一個50%占空比脈沖串,用于步進電機或伺服電機的速度和位置的開環控制。內置PTO功能僅提供了脈沖串輸出。應用程序必須通過PLC內置I/O或擴展模塊提供方向和限位控制。CPU224xp可以提供最高100KHz的脈沖輸出。部分初始化程序如圖4所示。
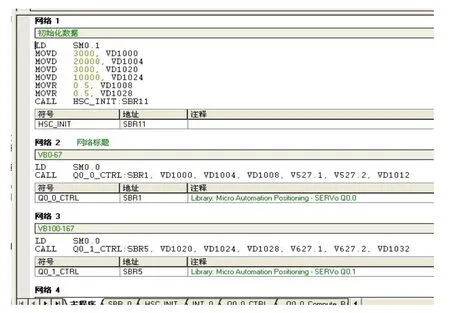
圖4 初始化程序
4 結語
西門子S7-200的PLC與西門子MM420變頻器通過RS485口用西門子的專用協議USS協議進行通訊,應用在小型自動控制系統中。因為USS協議采用輪詢方式通訊,所以PLC所帶的變頻器不能太多,否則會因為超時而造成通訊失敗。另外,采用MM420的RS485接口(即端子板上的14、15腳)通訊時,變頻器上不能安裝PROFIBUSDP通訊板。
[1]田峰.PLC在堆垛機控制系統中的應用[J].制造業自動化,2000(22):66-68.
[2]周彬.S7-200PLC的MAP庫文件應用解析[J].科技創新導報,2014(18):50.
[3]劉琳霞.變頻器的PLC控制方式研究[J].科技世界,2013(34):309.
[4]徐菱.基于PLC的堆垛機控制系統設計[J].組合機床與自動化加工技術,2005(1):72-75.
Design of a Stacker Control System Based on PLC
Liu LinxiaWu Jia
(Department of Mechanical and Electrical Engineering,Suzhou Chien-Shiung Institute of Technology,Taicang Jiangsu 215400)
The stacker is an important component of the automated warehouse system.According to the characteristics of the warehouse system,according to the characteristics of warehouse system,the structure of lifting,walking, picking and other parts of stacking machine was gave,a kind of stacking machine control system was put forward, which can realize precise position control by servo positioning.The stacker system has the advantages of simple structure,accurate positioning,high security,it has a certain application prospect.
automation warehouse;PLC;servo position control;HMI;security
TH246
A
1003-5168(2016)11-0037-02
2016-10-13
江蘇高校品牌專業建設工程資助項目(PPZY2015B188)。
劉琳霞(1979-),女,本科,工程師,研究方向:電氣控制。
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52