區域生長濾波算法在機載LiDAR數據城市建筑物提取中的應用
2016-12-21 06:56:55邊倩倩馬友利梁立恒
河南科技 2016年21期
邊倩倩 馬友利 梁立恒
(長春師范大學城市與環境科學學院,吉林長春 130000)
區域生長濾波算法在機載LiDAR數據城市建筑物提取中的應用
邊倩倩 馬友利 梁立恒
(長春師范大學城市與環境科學學院,吉林長春 130000)
隨著我國城市化進程的不斷加快,城市布局和城鎮化擴張已成為國情監測的主要內容之一。地理信息系統的發展為市政管理帶來了極大的方便,但在國情監測方面,主要還是依賴遙感圖像人工解譯等半自動方法、機載激光雷達掃描技術,為地理國情監測提供了一種快速有效的新方法。基于此,分析區域生長濾波在Li-DAR數據建筑物提取中的應用,描述LiDAR作為地理信息系統新型數據源在地理國情監測中的重要作用。
機載激光雷達;城市建筑物提取;區域生長濾波算法
1 LiDAR系統概述
自1970年,有學者開始對機載激光雷達掃描技術進行研究,第1臺對地觀測LiDAR系統LITE由美NASA研制成功。1988-1993年,德國斯圖加特大學通過將激光掃描技術與實時定位、定姿等技術相結合,制造出了目前應用較廣泛的機載激光掃描系統的最原始模型。從1995年開始,機載激光掃描儀逐漸商業化,目前生產機載激光掃描儀的廠家已逐漸發展到10家之多,已經生產成熟的型號已有30余種[1]。
激光雷達(Light Detection and Ranging,LiDAR),所測得的數據為數字表面模型(Digital Surface Model,DSM)的離散點表示,數據中含有空間三維信息和激光強度信息。LiDAR技術是近年攝影測量與遙感領域最具革命性的創新之一,當初提出該技術的首要目的是針對數字高程模型獲取困難的地區,如森林、沙灘等,使用常規攝影測量方法費時、費力,且很難獲取高精度的DEM數據。而機載激光雷達掃描系統,可以高效、高精度地直接獲取DEM數據,因而其成為了當前測量應用中深受歡迎的一項高新技術。
1.1 LiDAR系統組成
LiDAR遙感信息獲取系統一般包括激光測量裝置、GPS接收機和慣性測量裝置,有的系統也會包含1個數碼相機,數碼相機的功能是為獲取地面的高分辨率影像提供服務。
1.1.1 激光測量裝置。地物點的信息可以通過利用濾波算法對數據進行處理后獲得。
1.1.2 GPS接收機。通過接收軌道上的GPS衛星所發射的信號,通過對信號的實時解算衛星的空間位置,再通過后期處理,精確確定地面點位置。
1.1.3 慣性測量裝置(IMU)。根據接收到的衛星軌跡幾何關系,推算出GPS衛星未來在空中運行的位置,從而測算出該測量系統的實時和未來空間向量。通過動力裝置調整到按原軌跡運動,故該系統被稱作慣性導航系統。
1.2 LiDAR數據包含信息
LiDAR數據不僅包含激光點的三維坐標,還包含項目信息、GPS信息、航帶、姿態信息、回波次數信息、強度信息、掃描角度信息、分類信息和數據點顏色信息等。
2 LiDAR數據建筑物提取
現代城市空間主要由各種建筑物構成。建筑物覆蓋面積大,且其三維信息與城市規劃設計、城市交通網絡信息、城市地上地下基礎設施管理以及城市現代化管理等都密切相關。因此,對建筑物各種數據模型提取的研究與實現具有重要意義。
機載激光雷達通過發射激光脈沖并接收回波信號獲取目標信息,相對于其他測量手段,受天氣因素影響小;而且激光能穿透植被等地物而到達地面,因此能更精確地探測真實地形;利用LiDAR進行測量時,只需布設少量控制點,人工作業量少,且大部分數據處理工作均由軟件自動完成。綜上,LiDAR可以高效、快速獲取高精度、高密度三維空間數據,在數字城市建設中LiDAR必將發揮重要作用。
3 區域生長濾波算法
3.1 LiDAR數據濾波方法
LiDAR數據濾波原理分為基于回波強度等信息的濾波和基于高程突變的濾波兩類。基于回波強度信息的濾波認為,不同的目標對激光的反射強度是有差異的。基于高程突變的濾波原理認為,高程較大的點是地物點,高程較小的點是地面點。多數情況下,地形是連續的,地勢也是平滑的,根據空間自相關原理,距離越近的2個點高差應該越小。
3.2 區域生長濾波算法原理
區域生長濾波是一種基于高程突變的濾波方法,該算法主要適用于城市等平坦區域。其基本思想:先結合人類先驗知識判斷測區地貌,根據經驗對測區進行塊劃分,盡量保證每個塊地勢較平坦;然后在每個塊中首先尋找最初的地面種子點,對這些種子點進行8鄰域搜索,當鄰近點與地面種子點的高差小于所設定的閾值,則判斷該鄰近點為新的地面種子點,依次搜索擴張,直到沒有可接受的鄰近點結束,得到的種子地為地面點,非種子點為非地面點。
區域生長濾波對于地面起伏變化較大的區域并不理想,而在針對平坦區域效果較好,因此可利用這種算法對城市建筑物的輪廓進行提取。
3.3 區域生長濾波算法試驗
以某城市的一部分點云數據為例,使用區域生長濾波算法編寫數據處理代碼,并測試,圖1為城區原始點云數據,可以看到,數據中主要有建筑物和道路,建筑物的高程突變比較明顯,且城區地勢平坦,符合區域生長濾波所需要的條件。圖2為濾波后的建筑物點云數據,可以明顯地看到建筑物的輪廓被提取出來,當然也存在誤差,如圖2右上角,由于建筑物坐落的平臺與地面之間也存在高程突變,濾波后這個平臺也保存了下來,可以通過后期人工處理,將其刪除。
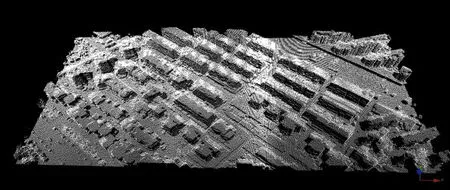
圖1 某城區原始點云數據
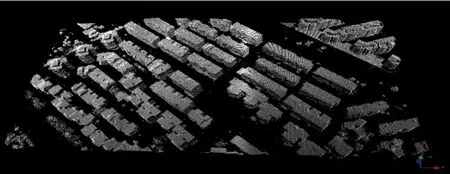
圖2 濾波后的建筑后物點云數據
4 結語
目前,空間信息數據的獲取是地球空間信息技術研究的熱點問題之一,LiDAR技術能夠滿足廣大用戶快速獲取高精度的DSM和DEM數據的需求。其因高精度、高效率、自動化程度高等優勢,正逐漸取代傳統的攝影測量,成為地貌點云數據獲取的重要手段。
我國城鎮化步伐的加快,使得對空間信息獲取要求不斷提高。本文以區域生長濾波驗證了針對LiDAR數據提取建筑物的有效性與高效性,但仍存在一定的局限性:①對地形要求較為嚴格,對于地形起伏較大的地區,該算法仍然不是最佳的選擇方案;②該算法的閾值目前仍是以經驗判別為主,沒有明確的理論算法的計算公式支持,所以完全實現自動化有待進一步的技術發展。
[1]方芳.機載LiDAR技術現狀及發展方向[A]//2009全國測繪科技信息交流會暨首屆測繪博客征文頒獎論文集,2009.
Application of Region Growing Filtering Algorithm for Airborne LiDAR Data in Urban Building Extraction
Bian QianqianMa YouliLiang Liheng
(School of Urban and Environmental Science,Changchun Normal University,Changchun Jilin 130000)
As China's urbanization process is accelerating,expansion of urban layout and urbanization has becoming one of the main contents of condition monitoring.The development of Geographic Information Systems(GIS)for municipal management has brought great convenience,but in condition monitoring,people still rely on manual interpretation of remote sensing images and other semi-automatic methods,airborne LiDAR scanning technology for the geographical condition monitoring provides a quick and effective way.Based on this,the application of regional growth filter for airborne LiDAR data in urban building extraction was analyzed,the importance of LiDAR as a new type of data source of geographic information system in the monitoring of geographical conditions was described.
airborne LiDAR;urban building extraction;region growing filtering algorithm
TP391.41
A
1003-5168(2016)11-0022-02
2016-10-09
邊倩倩(1988-),女,碩士,助理實驗師,研究方向:GPS數據處理、攝影測量等。
猜你喜歡
小讀者(2021年2期)2021-03-29 05:03:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
華人時刊(2019年13期)2019-11-17 14:59:54
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
文苑(2018年22期)2018-11-19 02:54:14
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
紅領巾·萌芽(2016年1期)2016-09-10 07:22:44
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21