基于K60的四軸飛行器環(huán)境信息采集系統(tǒng)設(shè)計(jì)
2016-12-21 07:14:07任曉明賈永興高華平
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2016年23期
伏 勛, 任曉明,賈永興,羅 楨,高華平
(上海電機(jī)學(xué)院 電氣學(xué)院,上海 200240)
?
基于K60的四軸飛行器環(huán)境信息采集系統(tǒng)設(shè)計(jì)
伏 勛, 任曉明,賈永興,羅 楨,高華平
(上海電機(jī)學(xué)院 電氣學(xué)院,上海 200240)
為能全面實(shí)時(shí)地采集環(huán)境信息數(shù)據(jù),設(shè)計(jì)了四軸飛行器環(huán)境信息采集系統(tǒng)。本設(shè)計(jì)采用Freescale K60微控制器作為主控芯片,MPU6050慣性測量傳感器和AK8975三軸磁羅盤作為慣性導(dǎo)航單元,使用PID控制算法并以PWM方式驅(qū)動(dòng)三相無刷電機(jī),從而控制四軸飛行器飛行姿態(tài)。通過2.4 GHz和5.8 GHz頻段將采集到的溫/濕度、PM2.5/PM10濃度、攝像頭采集圖像等信息傳輸?shù)娇刂婆_(tái)。經(jīng)測試,該系統(tǒng)滿足不同環(huán)境下及時(shí)采集數(shù)據(jù)、有效視頻監(jiān)測的要求,對(duì)實(shí)際現(xiàn)場監(jiān)測有一定的應(yīng)用價(jià)值。
四軸飛行器;環(huán)境信息采集;K60微處理器
0 引言
近年來空氣污染引起了公眾的熱議,如何有效、及時(shí)地處理空氣污染問題成為焦點(diǎn)。本文基于環(huán)境信息數(shù)據(jù)的采集,設(shè)計(jì)了四軸飛行器環(huán)境信息采集系統(tǒng)。傳感器技術(shù)和控制理論的不斷發(fā)展,尤其是微電子和微機(jī)械技術(shù)的逐步成熟,使四軸飛行器的自主飛行控制得以實(shí)現(xiàn),并成為國際上的研究熱點(diǎn)[1]。
文獻(xiàn)[1] 采用STM32系列32位處理器作為主控制器,使用ADIS16355慣性測量單元等傳感器用于姿態(tài)信息檢測,使用PID控制算法進(jìn)行姿態(tài)角的閉環(huán)控制。文獻(xiàn)[2] 采用 STM32作為主控芯片,三軸加速度傳感器MPU6050作為慣性測量單元,通過2.4 GHz無線模塊和遙控板進(jìn)行通信,最終使用PID控制算法以PWM方式驅(qū)動(dòng)電機(jī)實(shí)現(xiàn)了四軸飛行器的設(shè)計(jì)。文獻(xiàn)[3]采用 ARM處理器控制無刷直流電機(jī),并且通過加速度傳感器和陀螺儀的反饋數(shù)據(jù)進(jìn)行飛行器的平衡控制和姿態(tài)調(diào)節(jié)。
本文設(shè)計(jì)了四軸飛行器環(huán)境信息采集系統(tǒng),以K60微處理器為核心,采用慣性測量模塊MPU6050姿態(tài)獲取技術(shù),搭建四軸飛行器控制系統(tǒng)。設(shè)計(jì)包括四軸飛行器控制、環(huán)境信息采集、控制臺(tái)三部分。其中,四軸飛行器采用人工遙控控制;環(huán)境信息采集以模塊化為主,將圖像、溫濕度、PM2.5和PM10各個(gè)模塊進(jìn)行數(shù)據(jù)采集顯示輸出;控制臺(tái)負(fù)責(zé)數(shù)據(jù)交互與遙控。
1 系統(tǒng)設(shè)計(jì)方案
根據(jù)四軸飛行器實(shí)際的飛行需求和設(shè)計(jì)要求,系統(tǒng)采用主控單元K60采集環(huán)境信息,處理由溫濕度檢測模塊、PM2.5/ PM10檢測模塊反饋的數(shù)據(jù),并在參數(shù)顯示器上顯示;TS832發(fā)射端將攝像頭采集到的圖像信息通過工作頻率5.8 GHz無線傳輸?shù)竭b控器上的RC832接收端,并反映到圖像顯示器;領(lǐng)航者飛行控制器采用STM32F407VG芯片控制算法求解電機(jī)轉(zhuǎn)速,連接T6EHP-E接收機(jī),通過2.4 GHz頻段與遙控器進(jìn)行無線傳輸,由遙控器操作四軸飛行器執(zhí)行相應(yīng)指令,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速調(diào)整,進(jìn)而實(shí)現(xiàn)姿態(tài)控制。系統(tǒng)設(shè)計(jì)框圖如圖1。
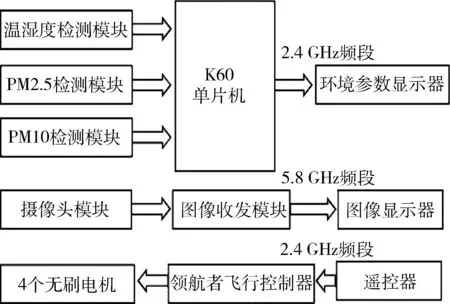
圖1 系統(tǒng)設(shè)計(jì)框圖
2 硬件設(shè)計(jì)
2.1 四軸飛行控制器
四軸飛行控制器的核心有MPU6050慣性測量傳感器、AK8975三軸磁羅盤、MS5611高精度氣壓儀。MPU6050慣性測量傳感器驅(qū)動(dòng)方式采用I2C接口,時(shí)鐘引腳 SCL連接到控制器的PB6,數(shù)據(jù)引腳連接到控制器的PB7,數(shù)據(jù)中斷引腳連接到控制器的PD7,其硬件原理圖如圖2所示。
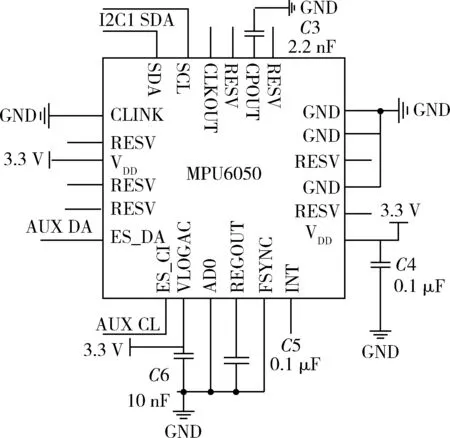
圖2 MPU6050硬件原理圖
AK8975三軸磁羅盤帶有高敏感度霍爾傳感器,通過增強(qiáng)信號(hào)處理器體系結(jié)構(gòu),實(shí)現(xiàn)寬動(dòng)態(tài)測量范圍和低電流消耗,不需外部時(shí)鐘[4]。
MS5611高精度氣壓儀由壓阻傳感器和傳感器接口組成,將測量的補(bǔ)償模擬氣壓值經(jīng)ADC轉(zhuǎn)換成24位數(shù)字輸出,采用I2C串行接口,串行時(shí)鐘SLCK和串行數(shù)據(jù)SDA與外部控制器進(jìn)行數(shù)據(jù)傳輸[5],其硬件原理圖如圖3所示。

圖3 MS5611硬件原理圖
設(shè)計(jì)選用F450型號(hào)的四軸飛行器機(jī)架,該飛行器載重量大、穩(wěn)定性強(qiáng)、加裝區(qū)域大、姿態(tài)控制簡單。四軸飛行器采用人工遙控控制,通過飛機(jī)前部攝像頭,將拍攝的影像傳給遙控器,并在顯示器上顯示,有利于操作人員對(duì)飛行器做出正確控制。
2.2 環(huán)境信息采集
2.2.1 圖像信息的采集
本系統(tǒng)采用700線攝像頭、TS832發(fā)射端和RC832接收端,攝像頭模塊拍攝現(xiàn)場狀況,反饋到機(jī)架上的圖像收發(fā)模塊,通過5.8 GHz頻段無線傳輸?shù)竭b控器上的圖像收發(fā)模塊,反映到圖像顯示器(4.3英寸)上。圖4所示為四軸飛行器飛行過程中拍攝到的一張圖像。

圖4 實(shí)拍圖像
2.2.2 溫濕度檢測模塊
本系統(tǒng)采用的是DHT11數(shù)字溫濕度傳感器模塊。DHT11是一款含有已校準(zhǔn)數(shù)字信號(hào)輸出的溫濕度復(fù)合傳感器,它應(yīng)用專用的數(shù)字模塊采集技術(shù)和溫濕度傳感技術(shù),確保其具有極高的可靠性與卓越的長期穩(wěn)定性,傳感器包括一個(gè)電阻式溫濕元件和一個(gè)NTC測溫元件,并且與一個(gè)高性能的8位單片機(jī)相連接。
通過溫濕度檢測模塊來檢測環(huán)境中的溫濕度,通過K60單片機(jī)來處理傳感器反饋的數(shù)據(jù),該數(shù)據(jù)通過2.4 GHz頻段無線傳輸?shù)竭b控器上的環(huán)境參數(shù)顯示器上,得到某一天的溫濕度數(shù)據(jù)如表1。
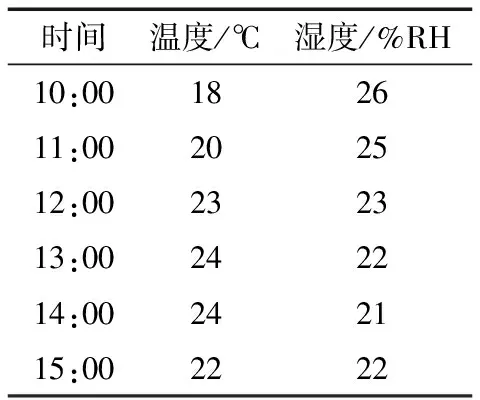
表1 溫濕度數(shù)據(jù)
2.2.3 PM2.5和PM10濃度采集
本系統(tǒng)采用SDS011激光PM2.5傳感器,能夠得到空氣中 0.3~10 μm懸浮顆粒物濃度,對(duì)PM2.5濃度及PM10濃度進(jìn)行檢測。其具有數(shù)據(jù)準(zhǔn)確、響應(yīng)快速、集成度高、分辨率高、數(shù)據(jù)穩(wěn)定可靠、數(shù)字化輸出等特點(diǎn)[6]。
通過SDS011激光PM2.5傳感器來采集環(huán)境中的各種參數(shù),經(jīng)K60單片機(jī)處理傳感器反饋的數(shù)據(jù),該數(shù)據(jù)通過2.4 GHz頻段無線傳輸?shù)竭b控器上的環(huán)境參數(shù)顯示器上。得到幾組PM2.5和PM10濃度的日變化數(shù)據(jù),如表2所示。將測得數(shù)據(jù)與當(dāng)?shù)貧庀缶直O(jiān)測數(shù)據(jù)作比較,其PM2.5有±1.2%偏差,PM10有±2.4%偏差,測量結(jié)果準(zhǔn)確度較高。
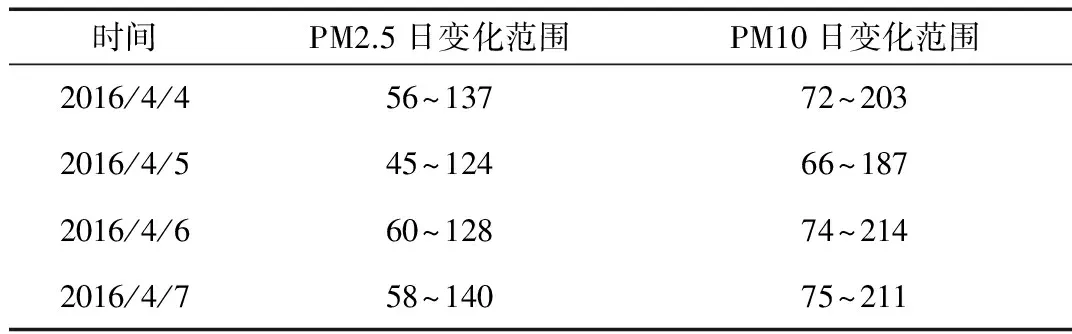
表2 PM2.5/PM10濃度日變化數(shù)據(jù) (μg/m3)
2.2.4 顯示反饋數(shù)據(jù)
本系統(tǒng)采用0.96英寸OLED液晶屏連接到K60芯片上,實(shí)時(shí)顯示數(shù)據(jù),如圖5所示。

圖5 實(shí)時(shí)數(shù)據(jù)顯示
2.3 控制臺(tái)
控制臺(tái)部分的研究涉及到遙控、OLED顯示、圖像顯示、無線數(shù)據(jù)傳輸。OLED顯示和圖像顯示已在環(huán)境信息采集中介紹。數(shù)據(jù)無線傳輸選用nRF24L01+無線接收模塊。nRF24L01+是一款工作在2.4~2.5 GHz世界通用ISM頻段的單片無線收發(fā)器芯片。無線收發(fā)器包括:頻率發(fā)生器、增強(qiáng)型SchockBurstTM模式控制器、功率放大器、晶體振蕩器、調(diào)制器、解調(diào)器。輸出功率、頻道選擇和協(xié)議的設(shè)置可以通過SPI接口進(jìn)行設(shè)置。其擁有極低的電流消耗:當(dāng)工作在發(fā)射模式下,發(fā)射功率為6 dBm時(shí)電流消耗為9 mA,接收模式時(shí)為12.3 mA。掉電模式和待機(jī)模式下電流消耗更低。nRF24L01+模塊和K60單片機(jī)的連接圖如圖6所示。
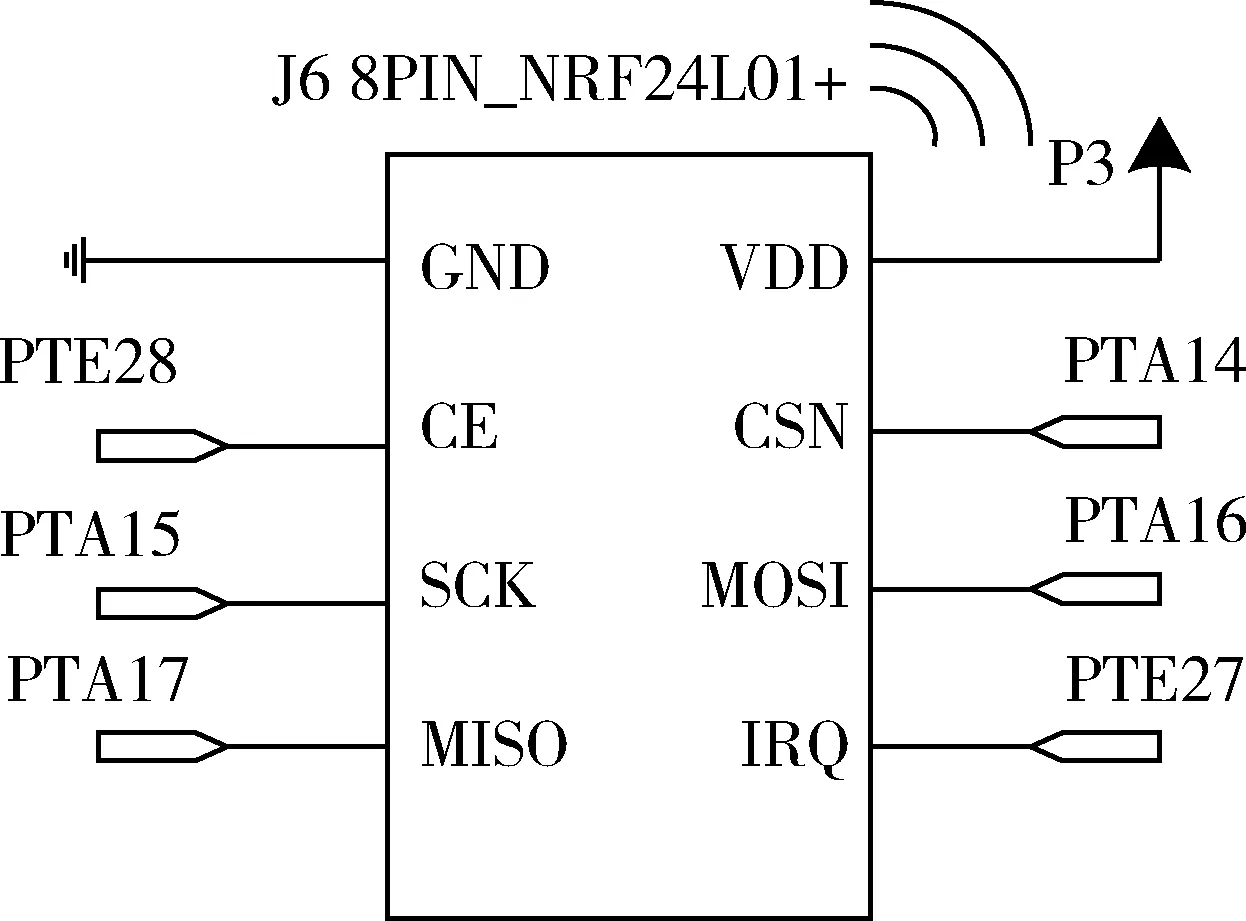
圖6 nRF24L01+模塊和K60單片機(jī)的連接圖
3 軟件設(shè)計(jì)
系統(tǒng)采用模塊化結(jié)構(gòu)設(shè)計(jì),使用IAR開發(fā)環(huán)境,系統(tǒng)功能組態(tài)更加方便。基本程序模塊有溫濕度采集模塊、PM2.5/PM10采集模塊、OLED顯示模塊、nRF24L01+無線收發(fā)模塊等,各個(gè)模塊既能獨(dú)立地實(shí)現(xiàn)各部分功能,又可以共同工作達(dá)到系統(tǒng)的設(shè)計(jì)要求。
3.1 數(shù)據(jù)發(fā)送
主控芯片K60按照中斷時(shí)間間隔向DTH11溫濕度傳感器、PM2.5傳感器發(fā)送起始信號(hào),將讀出的溫濕度、PM2.5/PM10等信息進(jìn)行整理校驗(yàn)后,通過無線收發(fā)模塊發(fā)送給控制終端,數(shù)據(jù)采集程序流程圖如圖7所示。采用定時(shí)器中斷的方式完成采集任務(wù),本設(shè)計(jì)采用每2 200 ms PIT0中斷一次,采集一次數(shù)據(jù)。由于時(shí)間間隔較短,各傳感器的數(shù)據(jù)顯示不斷更新,從而能夠?qū)崟r(shí)檢測到各環(huán)境參數(shù)的變化情況。
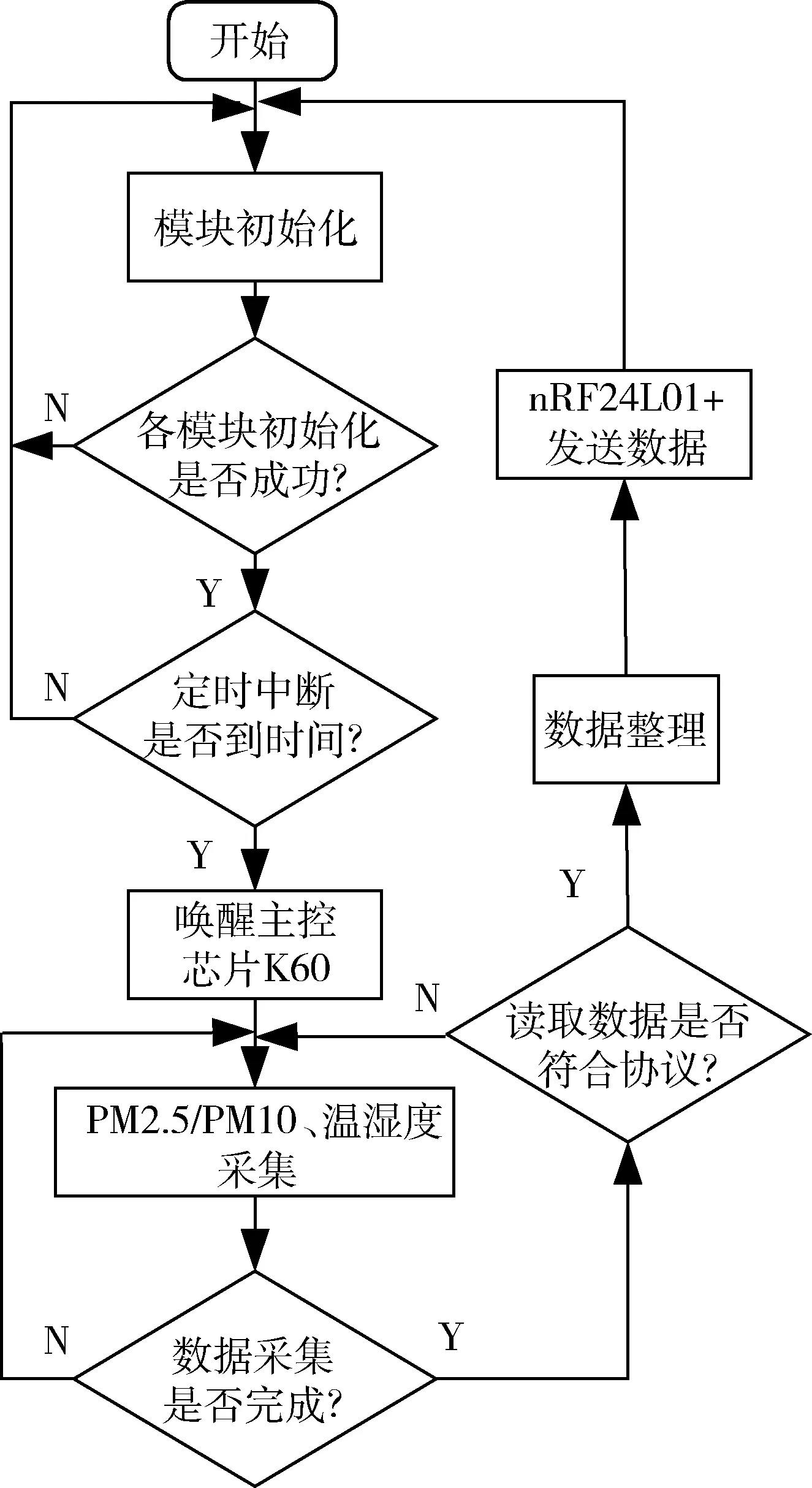
圖7 數(shù)據(jù)采集程序流程圖
3.2 數(shù)據(jù)接收
在中斷時(shí)間到達(dá)后,K60主控芯片發(fā)送指令,nRF24L01+模塊接收數(shù)據(jù),判斷數(shù)據(jù)是否正確,如果數(shù)據(jù)正確,則進(jìn)行OLED顯示,否則繼續(xù)接收數(shù)據(jù)。數(shù)據(jù)接收程序設(shè)計(jì)流程圖如圖8所示。
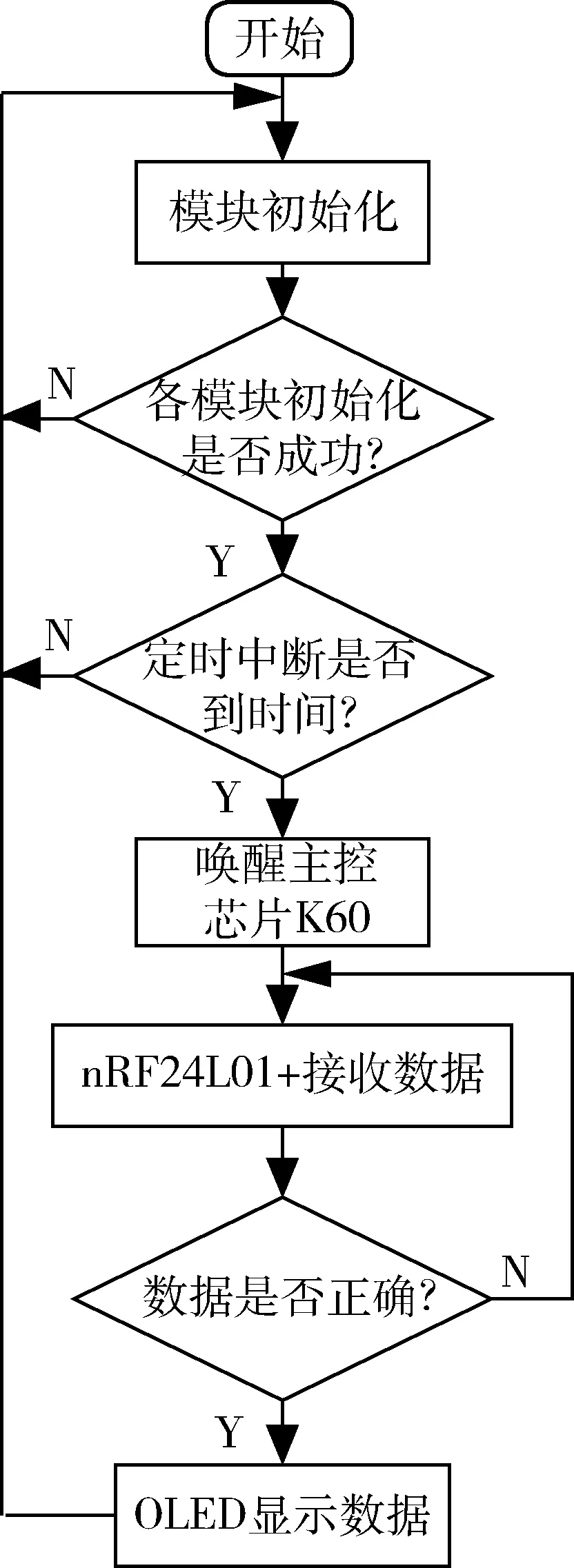
圖8 數(shù)據(jù)接收流程圖
4 結(jié)論
本文介紹了四軸飛行器環(huán)境信息采集系統(tǒng)的設(shè)計(jì),提出了系統(tǒng)的整體設(shè)計(jì)方案,并分別對(duì)系統(tǒng)的軟硬件進(jìn)行設(shè)計(jì)。系統(tǒng)以K60為主控制器,通過2.4 GHz和5.8 GHz無線模塊進(jìn)行通信控制,通過MPU 6050進(jìn)行姿態(tài)獲取,使用反饋控制算法進(jìn)行電機(jī)控制。安裝調(diào)試后,驗(yàn)證了該系統(tǒng)可以實(shí)現(xiàn)四軸飛行器的姿態(tài)控制;攝像頭正常拍攝影像且實(shí)時(shí)發(fā)送給遙控端接收器;飛機(jī)在飛行時(shí)能夠采集環(huán)境中的溫度、濕度、PM2.5、PM10等信息,并且能夠通過2.4 GHz頻段無線傳輸?shù)娇刂婆_(tái)。
[1] 劉峰,呂強(qiáng),王國勝,等.四軸飛行器姿態(tài)控制系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)測量與控制,2011,19(3):583-585.
[2] 常國權(quán),戴國強(qiáng).基于STM32的四軸飛行器飛控系統(tǒng)設(shè)計(jì)[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2015,15(2):29-32.
[3] 陳海濱,殳國華.四旋翼飛行器的設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索,2013,32(3):41-44.
[4] 李堯.四旋翼飛行器控制系統(tǒng)設(shè)計(jì)[D].大連:大連理工大學(xué),2013.
[5] BOUABDALLAH S. Design and control of quadrotors with application to autonomous flying[D].Switzerland:Lausanne EPFL,2007.
[6] 付佳賀.四軸飛行器的設(shè)計(jì)與研究[D].成都:電子科技大學(xué),2015.
伏勛(1991-), 女,碩士研究生,主要研究方向:電氣智能化控制與檢測。
任曉明(1977-),男,博士,副教授,主要研究方向:高壓測試技術(shù)及雷電防護(hù)。
Design of the quadrocopter environmental information acquisition system based on K60
Fu Xun,Ren Xiaoming,Jia Yongxing, Luo Zhen,Gao Huaping
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 200240, China)
In order to collect environmental information data in real time, the quadrocopter environment information collection system was designed. The design used Freescale K60 microcontroller as the master chip, inertial measurement sensor MPU6050 and three axis magnetic compass AK8975 as inertial navigation unit. The design used PID control algorithm and PWM method to drive the three-phase brushless motor to control the quadrocopter’s flight attitude. The temperature/humidity, PM2.5/PM10 concentration, camera image and other information were transmitted to the console through the 2.4 GHz and 5.8 GHz frequency bands. The experiment showed that the system can meet the requirements of data collection and video monitoring in different environment. It has application value to the actual field monitoring.
quadrocopter; environmental information collection; K60 micro controller
TP27
A
10.19358/j.issn.1674- 7720.2016.23.028
伏勛, 任曉明,賈永興,等. 基于K60的四軸飛行器環(huán)境信息采集系統(tǒng)設(shè)計(jì)[J].微型機(jī)與應(yīng)用,2016,35(23):96-99.
2016-08-13)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
