磁場定向控制在三相永磁同步微型風扇電機中的應用研究
2016-12-23 05:35:54王毅杰路林吉
微型電腦應用 2016年9期
王毅杰,路林吉
磁場定向控制在三相永磁同步微型風扇電機中的應用研究
王毅杰,路林吉
制冷業(yè)在國家節(jié)能減排的目標下,傳統(tǒng)的微型風扇電機大多使用單相異步結構,存在執(zhí)行效率低,噪音和力矩脈動大等諸多缺點。故近年來人們開始使用三相永磁同步電機和梯形波驅動方式來替代單相異步電機。在使用了三相交流永磁同步電機作為微型風扇電機后,效率、力矩脈動和轉速等諸多方面都有了大幅度的提高,但其梯形波控制方式過于簡單,使三相電機在360°周期內根據傳感器反饋信號以6拍形式實現(xiàn)自然換相,產生梯形波電流信號,從而近似地模擬電機的正弦特性。這種控制方式使得相電流在換相中變化過大,并有零電流狀態(tài),使電機仍存在較大的力矩脈動,并且在效率等方面仍存在改善空間。此課題是研究和分析使用磁場定向控制替代梯形波控制方式,在相同被控對象和負載的情況下,可顯著提高電機效率并改善轉矩脈動。
磁場定向控制;空間向量PWM;微型三相永磁同步電機;PID;磁場等效變換
0 引言
隨著國家節(jié)能減排政策的落實,冰箱冷柜中的風扇電機驅動技術日顯落后,雖然已開始從罩極式電機向永磁同步電機過渡,但驅動方式大多還使用簡單的梯形波控制。
本文的背景為與半導體廠商合作,利用 DSP芯片的高性能和靈活性實現(xiàn)算法,再進行硬件芯片固化算法及定制。本文根據實際情況對磁場定向控制進行分析和研究,目的是提高風扇電機的效率和降低因換相引起的力矩脈動。
1 總體設計方案
方案設計輸入為DC+12V電壓,通過三相全橋逆變器將直流輸入電壓逆變?yōu)槿嗥胶獾慕涣麟娏鳎刂迫嘤来磐诫姍C,如圖1所示:
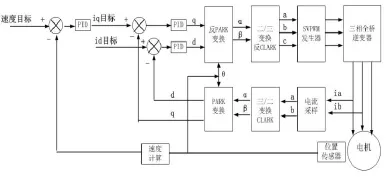
圖1 控制系統(tǒng)框圖
該三相全橋逆變器結構與現(xiàn)有的梯形波控制方式結構相同,將控制部分用磁場定向控制代替梯形波控制。使用位置傳感器監(jiān)測轉子位置,保證啟動的可靠性。設計最后將與梯形波控制方式做相同被控電機的對比。
2 硬件平臺與控制原理
2.1 硬件平臺
硬件平臺使用6個低壓MOSFET組成三相全橋逆變器結構,主控芯片和預驅芯片為 TI公司產品,主控芯片為TMS320F28035,使用集成三相的預驅動芯片DRV8303作為門極驅動電路[1],如圖2所示:

圖2 硬件結構框圖
采集三相交流系統(tǒng)的2相相電流,通過DRV8303內部的運放進行放大處理后,反饋給主控芯片進行ADC輸入。
本系統(tǒng)使用了 3個霍爾傳感器作為電機轉子的位置檢測器,3個霍爾傳感器在相位上互差120°,3等分均勻安裝在定子鐵心槽的中間空隙處,正面感應區(qū)域正對轉子。
有別于用于伺服電機的位置編碼器,以及梯形波控制方式的霍爾傳感IC器件,霍爾傳感器輸出為模擬量差分信號。每個霍爾傳感器有2個輸出引腳,2個輸出信號幅值相等,相位相反。對于微型電機的風扇驅動應用,無法安裝例如伺服電機的位置編碼器。對于梯形波控制方式所使用的霍爾傳感IC器件,則只能產生高電平或低電平。霍爾傳感器則可以很好的以模擬量信號顯示當前轉子的實時電角度,主控芯片只需以AD采樣霍爾傳感器的輸出信號,加以查表處理,即可得到所需變量。另外霍爾傳感器的信號差分輸出方式,還具有抗干擾能力強,時序定位準確等優(yōu)點。
2.2 空間向量PWM
硬件上電源逆變器使用了典型的 3相全橋的逆變器結構,如圖3所示:
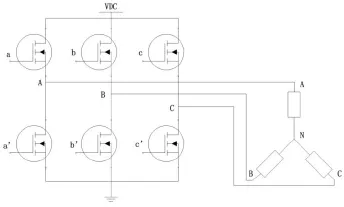
圖3 逆變器結構框圖
系統(tǒng)供電電壓為VDC,3路上橋MOS柵極控制信號為a、b和c,3路下橋MOS柵極控制信號a’、b’和c’為3路上橋控制信號的互補信號。電機定子線圈三相相線端為A、B和C,三相Y型線圈中心點為N。
由于該三相電源逆變器的上橋控制信號a、b和c,只有“開”和“關”兩種信號狀態(tài),可分別記為1和0,則上述逆變器共有8種可能的開關模式。對應控制信號a、b、c操作功率管的開關組合,除了 2種零向量(000)和(111)的全部關閉狀態(tài)以外,有效的開關組合共有6種,也就是說,在一個電周期內,共進行6次開關切換,梯形波驅動方式即依靠這種基本的六拍制進行換相,并產生一個正六邊形的磁鏈軌跡。以該正六邊形每個方向定義一個矢量,即得到的基本空間向量如圖4所示:
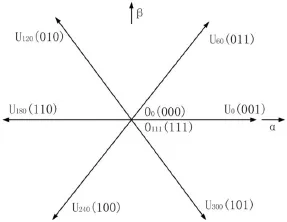
圖4 基本空間向量圖
梯形波控制方式以圖4中拍為基礎進行換相,得到的相電流受電機感抗影響變形為梯形波形態(tài),故稱為梯形波控制。在360°周期內每隔60°換相一次,60°之內不做任何動作,而轉子卻還隨定子磁場吸引進行旋轉,故而在旋轉過程中大多數時間并非最佳效率點。
空間向量PWM調制技術的目的,是以圖4的基本空間向量為基礎,利用逆變器的開關組合,去近似得到一個合成的定子參考電壓向量UOUT。這個定子參考電壓向量UOUT在2個相鄰的基本空間向量之間,即可將正六邊形的磁鏈軌跡變?yōu)檎噙呅蔚拇沛溰壽E,當正多邊形的邊越多,該磁鏈軌跡就可越近似的得到圓形旋轉磁場。
2.3 磁場定向控制
磁場定向控制理論的目的,是通過一系列的坐標變換,將多變量、非線性、強耦合的三相交流系統(tǒng),等效變換為類似于直流電機的磁場結構。這樣就可將三相交流系統(tǒng)中,定子上無法分辨的勵磁電流和負載電流,像對直流電機的勵磁電流和負載電流那樣分別進行獨立的控制[2]。這樣一來,對三相交流系統(tǒng)的調速和控制性能,就可以得到類似于對直流電機的控制性能了。最后通過空間向量PWM技術,逆變?yōu)槿嗥胶獠⒒ゲ?20°的交流電流,并在定子線圈上形成圓形磁場。
由于三相交流系統(tǒng)難以直接等效變換為兩相直流系統(tǒng),所以需設一個兩相交流系統(tǒng)作為過渡階段。
兩相交流系統(tǒng)結構類似于三相交流系統(tǒng),兩相繞組在空間上互差90°,兩相平衡的交流電流在相位上也互差90°,則類似于三相交流系統(tǒng),兩相交流系統(tǒng)也可在空間上形成一個旋轉的圓形磁場。如三相交流系統(tǒng)和兩相交流系統(tǒng)產生的磁場強度等各變量均相同,也即當這兩種不同系統(tǒng)產生的旋轉圓形磁場完全相同,即可認為三相交流系統(tǒng)和兩相交流系統(tǒng)所產生的磁場是可以互相等效的。
但對于類似于直流電機的磁場系統(tǒng)而言,由于通入的是直流電流,所以這個恒定磁場是靜止并不旋轉的。現(xiàn)假設繞組A和繞組B,空間上互差90°垂直,則其會在空間上合成一個靜止的合成磁場。現(xiàn)假設繞組A和繞組B,在結構與相對位置不變的情況下,借助外力讓它們同時以兩個繞組正交交點為圓心旋轉起來,它們的合成磁場也就旋轉了起來。當這個合成磁場繞圓旋轉了一周,也就形成了一個圓形磁場。如此時這個被外力帶動的圓形磁場強度等各變量與上述介紹的三相和兩相交流系統(tǒng)的圓形磁場均相同,也即當這三種不同系統(tǒng)產生的旋轉圓形磁場完全相同,即可認為三相交流系統(tǒng)、兩相交流系統(tǒng)和旋轉的兩相直流系統(tǒng),這三種系統(tǒng)所產生的磁場是可以互相等效的。
一般稱三相交流系統(tǒng)向兩相交流系統(tǒng)的變換為三/二變換,或稱為Clark變換。兩相交流系統(tǒng)向三相交流系統(tǒng)的變換,稱為二/三變換,或成為反Clark變換。兩相交流系統(tǒng)變換為旋轉的直流系統(tǒng),稱為交/直變換,或稱為Park變換。旋轉的直流系統(tǒng)變換為兩相交流系統(tǒng)的變換,稱為直/交變換,或稱為反Park變換。
3 軟件設計
3.1 Clark變換
根據三相交流電流互差120°的特性可得式(1):
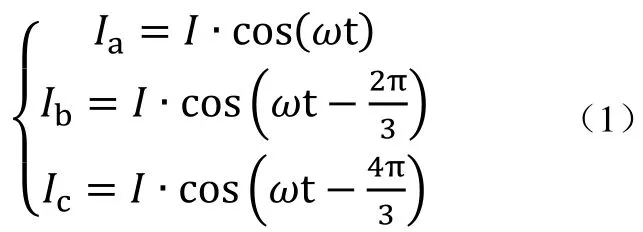
并且三相交流系統(tǒng)電流平衡,即式(2):

本文不使用經典的三相電流矩陣換算方法,而是簡單的通過三角函數和差角公式,可將式(1)中的b項分解,得到式(3):

設三相交流系統(tǒng)坐標系的a與兩相交流系統(tǒng)坐標系α重合,并幅值相同,即 =α,并有兩相交流系統(tǒng)公式如式(4):

將(4)代入(3),整理得Clark變換式(5):

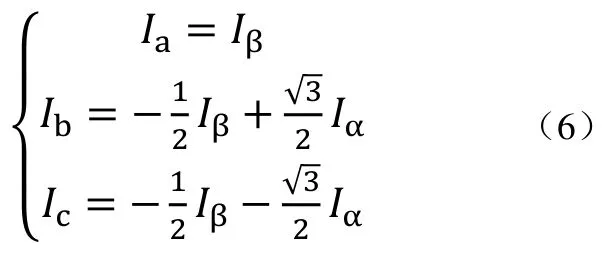
并可用相同方法反推,得到反Clark變換式(6):
3.2 Park變換
如圖5所示:
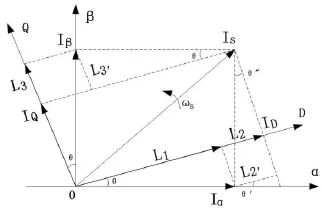
圖5 兩相靜止直流繞組旋轉示意圖
設兩相靜止的交流系統(tǒng)有αβ坐標系,設兩相直流繞組旋轉體系統(tǒng)有DQ旋轉坐標系。其中,DQ坐標系以定子電流角頻率ωs的速度在旋轉,D軸與α軸的夾角記為θ,由于DQ坐標系是旋轉的,所以θ是隨時間變化的。設Is是定子電流矢量,Is分別在DQ坐標系和αβ坐標系上都有投影。IαIβ由Clark變換已知,θ為霍爾角度,則需要坐標變換來求得ID和IQ。通過圖中增加的輔助線和三角函數關系,可得到式(7):

同理,通過輔助線和三角函數關系,可知式(8):

通過輔助線和三角關系可知:L3=L3′
從而推導出式(9)::

將式(9)代入式(8)可得到第二個關系式如式(10):

與第一個關系式(7)一起整理為式(11)::


(12)即為反Park變換矩陣。
3.3 PID
本系統(tǒng)使用了PID中的位置式PID,并在基本的PID算法上,結合本系統(tǒng)和調試時的實際情況,增加了部分內容。如圖6所示:
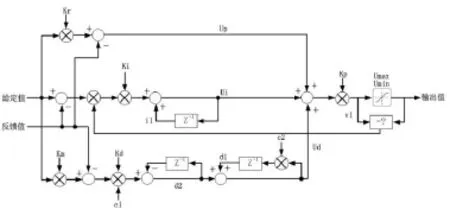
圖6 PID原理圖
其中在比例項中,對系統(tǒng)給定值增加了權重項Kr,在電機啟動和加速階段,可根據實際調試情況,增加Kr來放大偏差值如式(13):

本系統(tǒng)中,由于輸出具有最大飽和限制,所以為防止積分項過調,以及減少從飽和時退出的相應時間,積分項設有一個開關量w1,變量w1的值只有0和1兩種情況,當w=時,可使積分項功能關閉。積分項如式(14):

本系統(tǒng)增加了微分項權重Km,其構成方式與比例項權重Kr類似,這兩個權重變量可分別獨立控制。另外,微分項一般對噪聲都會較敏感,系統(tǒng)在此處增加了一階數字濾波器,公式如式(15):

當比例項、積分項和微分項分別完成后,執(zhí)行下式完成PID控制如式(16)::

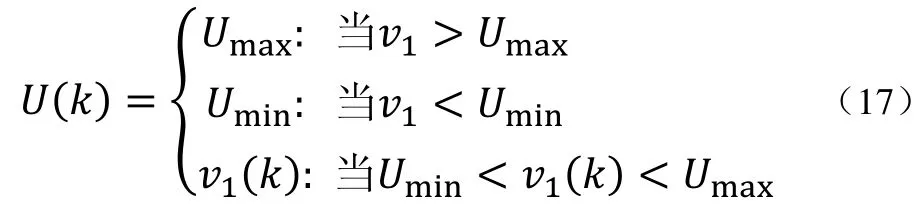
此外,為防實際輸出過大產生錯誤,設定輸出飽和系數Umx和Umn,控制最終結果如式(17):
4 測試結果
測試電機共3種,由交流220V/50Hz驅動的單相異步電機,由梯形波控制的三相永磁同步電機,以及由磁場定向控制的三相永磁同步電機。其中,后兩種控制方式不同,但被控電機各參數均完全相同。測試結果如圖7所示:
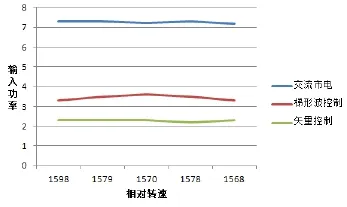
圖7 電機輸入輸出對比圖
單相異步電機輸入功率的平均值7.24W,梯形波控制的永磁同步電機平均輸入功率為 3.44W,即在輸出轉速相同,誤差3%的前提下,輸入功率下降了50%左右。
使用磁場定向控制的永磁同步電機,在電機結構、定子和轉子參數相同的情況下,平均輸入功率為2.28W,即在輸出轉速相同和轉速誤差3%的前提下,輸入功率比梯形波控制的相同電機下降了33%左右。
5 總結
隨著風冷式冰箱在行業(yè)內越來越普及,微型風機因其數量的龐大性,使得功耗的下降對國家關于白電行業(yè)節(jié)能減排的政策具有重要的現(xiàn)實意義。
本文就磁場定向控制在微型風機的控制上進行了分析,并結合實際做了部分修改和驗證了控制實現(xiàn),并通過實際測試情況驗證了控制的有效性。
[1] DRV8303EVM User's Guide (Rev. A),[R]TI公司,2012年.
[2] 李永東等.交流電機數字控制系統(tǒng)[M].機械工業(yè)出版社,2002, 122-256.
[3] 王曉明等.電動機的DSP控制[M].北京:北京航空航天大學出版社, 2009, 100-18.
[4] 曾允文等.變頻調速SVPWM技術的原理、算法與應用[M].北京: 機械工業(yè)出版社,2011.
Application of Field Oriented Control in Micro Fan of Three Phase PMSM
Wang Yijie,Lu Linji
(Automation Institute, Shanghai JiaoTong University, Shanghai 200240, China)
The motor structure of classical refrigerator micro fan is single-phase asynchronous. Considering national energy saving policies, classical micro fan motor has a lot of drawbacks such as low efficiency, uncontrollability, unacceptable noise and torque ripple. So the classical single-phase asynchronous motor has been replaced by three-phase permanent magnet synchronous motor and trapezoidal waveform control technology developed in recent years. After using the new motor structure and control method, it has obtained the good effect in increase efficiency and reducing torque ripple. But the trapezoidal waveform control method istill on a rather simplistic level in the control of PMSM. According the feedback signals of rotor position sensor, the trapezoidal waveform control method generated six states in whole 360° commutating cycle. This makes the phase current turn into the trapezoidal waveform. The trapezoidal wave current still has a lot of torque ripple because of sudden change of phase current and zero current states. It’s still far from perfect in motor efficiency and torque ripple. Through the applied research of this giuen in, the trapezoidal waveform control method was replaced by the field oriented control method, and the motor efficiency and torque ripple haue been greatly improved.
Field Oriented Control, Space Vector PWM, Micro Three-phase PMSM, PID, Magnetic Equivalent Conversion
TP393
A
1007-757X(2016)09-0060-04
2016.06.20)
王毅杰(1981-),男,上海交通大學,自動化系,工程碩士研究生,研究方向:電機控制的研究,上海 200240
路林吉(1963-),男,上海交大,自動化系,副教授,研究方向:工業(yè)自動化系統(tǒng)設計、數字圖像處理技術及應用,上海 200240
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
今日農業(yè)(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海峽姐妹(2020年8期)2020-08-25 09:30:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
