大眾途觀ESP系統(tǒng)故障診斷與維修
2016-12-24 07:49:48楊旭志廖中文陳述官
汽車(chē)實(shí)用技術(shù) 2016年1期
楊旭志,廖中文,陳述官
(廣東農(nóng)工商職業(yè)技術(shù)學(xué)院機(jī)電系,廣東 廣州 510507)
大眾途觀ESP系統(tǒng)故障診斷與維修
楊旭志,廖中文,陳述官
(廣東農(nóng)工商職業(yè)技術(shù)學(xué)院機(jī)電系,廣東 廣州 510507)
一輛2012年產(chǎn)的大眾途觀由于電子駐車(chē)控制單元故障導(dǎo)致在行駛過(guò)程中出現(xiàn)ESP指示燈點(diǎn)亮。文章介紹了ESP系統(tǒng)的基本結(jié)構(gòu)和工作原理,闡述了故障診斷與排除的思路,最終排除了故障。
ESP系統(tǒng);大眾途觀;診斷與維修
10.16638/j.cnki.1671-7988.2016.01.060
CLC NO.:U472.9 Document Code:B Article ID:1671-7988(2016)01-174-03
1、故障現(xiàn)象
一輛2012年產(chǎn)的大眾途觀進(jìn)廠(chǎng)維修,行駛里程4萬(wàn)多公里,車(chē)輛在行駛過(guò)程中有時(shí)出現(xiàn)ESP故障指示燈和胎壓報(bào)警燈常亮,有時(shí)車(chē)子重新啟動(dòng)后又能正常行駛幾公里后ESP故障指示燈再次亮起。
2、ESP系統(tǒng)的結(jié)構(gòu)組成及工作過(guò)程
ESP的英文全稱(chēng)是Electronic Stability Program,中文翻譯成電子穩(wěn)定程序控制系統(tǒng),也稱(chēng)為車(chē)身動(dòng)態(tài)穩(wěn)定系統(tǒng)。在不同的車(chē)系里也有被稱(chēng)為ESC、VSA、VSC、VDC、DSC、VSM等。由于集成了ABS系統(tǒng)和ASR系統(tǒng)兩者的基本功能,汽車(chē)ESP系統(tǒng)能夠在極短的時(shí)間內(nèi),識(shí)別并判斷出汽車(chē)各種不穩(wěn)定行駛狀態(tài)。比如由于受到外界的干擾,汽車(chē)可能出現(xiàn)側(cè)滑、甩尾等不穩(wěn)定行駛狀態(tài),從而發(fā)生偏離預(yù)定行駛軌跡或翻轉(zhuǎn)等危險(xiǎn)情況,通過(guò)ESP系統(tǒng)智能化控制,控制制動(dòng)器施加理想的制動(dòng)力,使車(chē)輪迅速恢復(fù)附著力,從而及時(shí)地消除各種不穩(wěn)定因素,使汽車(chē)保持在所期望的行駛軌跡上運(yùn)行,確保了行駛安全。
2.1 ESP系統(tǒng)結(jié)構(gòu)組成
汽車(chē)ESP系統(tǒng)主要由電子控制單元(ECU)、各種傳感器及執(zhí)行器三部分組成。
(1)ESP系統(tǒng)中的傳感器主要有:輪速傳感器、橫向加速度傳感器、縱向加速度傳感器、側(cè)滑傳感器、橫擺角速度傳感器、轉(zhuǎn)向傳感器、制動(dòng)壓力傳感器、車(chē)身翻轉(zhuǎn)角速度傳感器等,通過(guò)這些傳感器來(lái)采集汽車(chē)行駛狀況的各種信息。
(2)電子控制單元(ECU):電控單元ECU接收上述各傳感器的信號(hào)后,然后進(jìn)行分析、判斷、計(jì)算,從而得知汽車(chē)的實(shí)際運(yùn)行狀態(tài),進(jìn)而發(fā)出控制指令,控制一個(gè)或多個(gè)車(chē)輪制動(dòng)器的制動(dòng)力,使汽車(chē)按照駕駛員所期望的理想路線(xiàn)行駛。
(3)執(zhí)行器:接收電子控制單元(ECU)發(fā)出的命令信號(hào),同時(shí)執(zhí)行控制信號(hào)。ESP系統(tǒng)中的執(zhí)行器:制動(dòng)系統(tǒng)和發(fā)動(dòng)機(jī)管理系統(tǒng)。
2.2 ESP系統(tǒng)工作過(guò)程
ESP系統(tǒng)的工作過(guò)程可概括為信號(hào)采集、信號(hào)處理計(jì)算、ECU判斷和執(zhí)行器執(zhí)行四個(gè)過(guò)程,ESP系統(tǒng)工作過(guò)程流程圖如圖1所示。
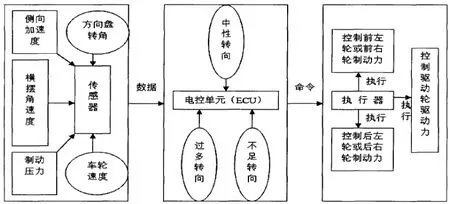
圖1 ESP系統(tǒng)工作過(guò)程流程圖
(1)信號(hào)采集:各種傳感器采集汽車(chē)的運(yùn)行狀態(tài)信息,如:橫向加速度、側(cè)向加速度、橫擺角速度、車(chē)輪轉(zhuǎn)速、轉(zhuǎn)向盤(pán)轉(zhuǎn)角、制動(dòng)力矩等數(shù)據(jù),然后將采集到的信號(hào)傳送給電控單元ECU。
(2)信號(hào)處理計(jì)算:傳感器采集的信號(hào)傳送到電控單元ECU,ECU對(duì)其進(jìn)行計(jì)算、分析,獲取汽車(chē)當(dāng)前運(yùn)行狀態(tài)參數(shù)信息,同時(shí)根據(jù)汽車(chē)二自由度參考數(shù)學(xué)模型計(jì)算得出當(dāng)前理想狀態(tài)下的行駛狀態(tài)參數(shù)。
(3)ECU判斷:ECU將理想狀態(tài)下的參數(shù)值與汽車(chē)當(dāng)前運(yùn)行的實(shí)際值進(jìn)行比較,計(jì)算兩者之間的偏差值,并根據(jù)行駛穩(wěn)定性判斷標(biāo)準(zhǔn),判斷出汽車(chē)是否處于理想工況,由此確定是否需要調(diào)節(jié)制動(dòng)器制動(dòng)力和控制驅(qū)動(dòng)輪驅(qū)動(dòng)力。
(4)指令執(zhí)行:執(zhí)行ECU的指令,調(diào)節(jié)制動(dòng)器制動(dòng)力或驅(qū)動(dòng)輪驅(qū)動(dòng)力的大小,使汽車(chē)的制動(dòng)系統(tǒng)、轉(zhuǎn)向系統(tǒng)、驅(qū)動(dòng)系統(tǒng)始終保持在最佳組合狀態(tài),同時(shí)及時(shí)調(diào)節(jié)汽車(chē)行駛過(guò)程中出現(xiàn)的不穩(wěn)定因素,防止駕駛員的誤操作,避免交通事故的發(fā)生。
2.3 ESP系統(tǒng)的作用
汽車(chē)在極限行駛工況下,ESP系統(tǒng)作用表現(xiàn)在能夠協(xié)助駕駛員控制車(chē)輛的行駛,在輪胎和地面間還存在附著力的情況下,ESP系統(tǒng)對(duì)路面實(shí)際情況和駕駛員操作進(jìn)行分析、判斷之后,對(duì)汽車(chē)的行駛狀態(tài)進(jìn)行調(diào)節(jié)控制,保證汽車(chē)能夠按照駕駛員預(yù)期的路線(xiàn)上行駛。
ESP系統(tǒng)作用主要表現(xiàn)在以下三方面:
(1)防止驅(qū)動(dòng)輪在起步加速時(shí)打滑。起步時(shí),ESP系統(tǒng)對(duì)制動(dòng)系統(tǒng)、發(fā)動(dòng)機(jī)管理模塊和變速換檔操作進(jìn)行綜合管理控制,使驅(qū)動(dòng)輪保持合適的驅(qū)動(dòng)扭矩,避免起步加速時(shí)打滑。在整個(gè)起步過(guò)程中,ESP系統(tǒng)的電控單元ECU實(shí)時(shí)分析、處理傳感器信號(hào),并發(fā)出相應(yīng)的控制指令。
(2)使汽車(chē)具有良好的操縱穩(wěn)定性。汽車(chē)轉(zhuǎn)向時(shí),當(dāng)駕駛員操作轉(zhuǎn)向盤(pán)轉(zhuǎn)向過(guò)大時(shí),汽車(chē)常常不能按照預(yù)期的軌跡行駛,實(shí)際轉(zhuǎn)彎半徑小于理想轉(zhuǎn)彎半徑,即出現(xiàn)轉(zhuǎn)向過(guò)度情況,后輪將失去控制,發(fā)生側(cè)滑或甩尾現(xiàn)象。ESP系統(tǒng)感知到即將出現(xiàn)此種情況時(shí),ESP系統(tǒng)對(duì)外側(cè)前輪施加制動(dòng)力矩,前輪產(chǎn)生一個(gè)與車(chē)身反向扭矩,從而實(shí)現(xiàn)穩(wěn)定車(chē)身的作用;同樣,如果轉(zhuǎn)向盤(pán)轉(zhuǎn)向不足時(shí),ESP系統(tǒng)會(huì)對(duì)內(nèi)側(cè)后輪施加制動(dòng)力矩,產(chǎn)生一個(gè)與車(chē)身轉(zhuǎn)矩方向相同的轉(zhuǎn)矩,以校正汽車(chē)的行駛方向。
(3)提高制動(dòng)效果,并且保證制動(dòng)過(guò)程的操縱穩(wěn)定性。當(dāng)汽車(chē)在路面(左右兩側(cè)車(chē)輪附著系數(shù)不同的路面)上實(shí)施制動(dòng)時(shí),為了防止車(chē)輪發(fā)生抱死滑動(dòng),制動(dòng)系統(tǒng)對(duì)行駛在附著系數(shù)不同路面的左右車(chē)輪施加不相同的制動(dòng)力。假如無(wú)制動(dòng)器施加制動(dòng)力產(chǎn)生一個(gè)反方向的力矩控制車(chē)身,不對(duì)稱(chēng)的制動(dòng)力會(huì)使汽車(chē)受到同一個(gè)轉(zhuǎn)向的轉(zhuǎn)矩,導(dǎo)致汽車(chē)在路面旋轉(zhuǎn)打滑。當(dāng)ESP系統(tǒng)感知這種趨勢(shì)后,向轉(zhuǎn)向盤(pán)轉(zhuǎn)向電動(dòng)機(jī)發(fā)出轉(zhuǎn)角指令,此時(shí)駕駛員感覺(jué)到轉(zhuǎn)向盤(pán)輕微轉(zhuǎn)角的變化后,反向旋轉(zhuǎn)轉(zhuǎn)向盤(pán),穩(wěn)定車(chē)身。ESP系統(tǒng)通過(guò)此操作,制動(dòng)力能夠最大程度上利用地面附著力,大大縮短制動(dòng)距離,使制動(dòng)距離減小5%~10%。
目前,ESP系統(tǒng)所使用類(lèi)型有3種:一是四通道系統(tǒng),可以分別向四個(gè)車(chē)輪獨(dú)立地施加制動(dòng)力;二是雙通道系統(tǒng),
其只對(duì)兩個(gè)前輪或后輪獨(dú)立施加制動(dòng),或?qū)擒?chē)輪施加制動(dòng);三是三通道系統(tǒng),對(duì)兩個(gè)前輪獨(dú)立的施加制動(dòng)力,而對(duì)兩后輪施加相同的制動(dòng)力。這三種系統(tǒng)的成本各不一樣,產(chǎn)生的制動(dòng)效果也有所不同,其中四通道系統(tǒng)作用效果最好,所以大多數(shù)中高級(jí)車(chē)多采用四通道的ESP系統(tǒng)。
2.4 ESP系統(tǒng)的特點(diǎn)
(1)實(shí)時(shí)監(jiān)控:ESP系統(tǒng)實(shí)時(shí)監(jiān)控路面的反饋信息、駕駛員的操作以及汽車(chē)實(shí)時(shí)運(yùn)行狀態(tài),并且根據(jù)實(shí)時(shí)監(jiān)測(cè)信息向發(fā)動(dòng)機(jī)和制動(dòng)系統(tǒng)發(fā)出控制指令。
(2)主動(dòng)控制:ESP系統(tǒng)通過(guò)調(diào)控驅(qū)動(dòng)輪驅(qū)動(dòng)力和制動(dòng)器制動(dòng)力來(lái)修正汽車(chē)轉(zhuǎn)向特性(過(guò)度或不足轉(zhuǎn)向)。
(3)事先警示:ESP系統(tǒng)具有實(shí)時(shí)警示功能,當(dāng)汽車(chē)處于不穩(wěn)定的行駛狀態(tài)時(shí),除了主動(dòng)保持汽車(chē)穩(wěn)定性外,還通過(guò)警示燈向駕駛員發(fā)出警告。
3、故障診斷與維修
3.1 讀取故障代碼
通過(guò)診斷儀讀取系統(tǒng)有以下故障:03 01423橫向加速度傳感器G200不可靠信號(hào)。大致可以判斷故障范圍在橫向加速度傳感器G200、連接線(xiàn)路或者J540電子駐車(chē)控制單元。
3.2 故障診斷與排除
由于G200橫向加速度傳感器、G202偏轉(zhuǎn)率傳感器、G251縱向加速度傳感器集成在J540電子駐車(chē)控制單元里面,如圖2所示。
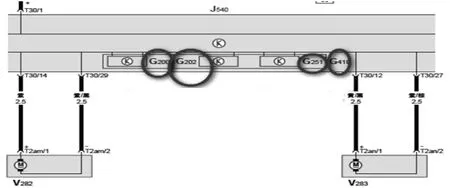
圖2 電子駐車(chē)控制單元
只能先檢查控制單元相關(guān)線(xiàn)路發(fā)現(xiàn)無(wú)故障,由于內(nèi)部傳感器無(wú)法進(jìn)行檢查所以只能夠使用VAS5052診斷儀進(jìn)行讀取數(shù)據(jù),通過(guò)對(duì)數(shù)據(jù)流的檢查發(fā)現(xiàn)車(chē)輛在靜止時(shí)橫向加速度傳感器的數(shù)據(jù)在1-2.8ms來(lái)回變化,而正常的車(chē)子變化量在0.5ms以?xún)?nèi),此時(shí)的車(chē)子并沒(méi)有行駛不存在有橫向加速度的變化。更換新的電子駐車(chē)控制單元(3AA 907 801 B)并且進(jìn)行各項(xiàng)匹配,再次讀取數(shù)據(jù)流,G200橫向加速度傳感器數(shù)據(jù)在0.26ms左右,試車(chē)行駛后證明故障排除。
4、結(jié)論
根據(jù)以上的診斷與分析,電子駐車(chē)控制單元故障是造成大眾途觀ESP故障指示燈被點(diǎn)亮的原因。由于本案例中G200橫向加速度傳感器、G202偏轉(zhuǎn)率傳感器、G251縱向加速度傳感器集成在一起,因此在故障診斷排除中采取了讀取數(shù)據(jù)流的方法。
[1] 陳箐,楊倩倩. ESP電子車(chē)身穩(wěn)定系統(tǒng)模擬設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2012,11:168-169.
[2] 張慶,胡瑞. 車(chē)身電子穩(wěn)定控制系統(tǒng)(ESC)評(píng)價(jià)方法的研究[J].新技術(shù)新工藝,2012,11:80-81.
[3] 何志雄. 汽車(chē)的不穩(wěn)定形勢(shì)與ESP的應(yīng)用[J]. 湖南農(nóng)機(jī), 2010, 5:49-50.
[4] J.Tom Denton. Automobile Electronic and Electronic Systems [Z].Elsevies Butterworth Heinemann Co.Ltd.,2009.
[5] 陳天殷.車(chē)輛電子穩(wěn)定程序控制系統(tǒng)ESP[J].汽車(chē)電器,2015, 2:16-18
[6] 陳家瑞. 汽車(chē)構(gòu)造[M](第四版). 北京:人民交通出版社,2002.
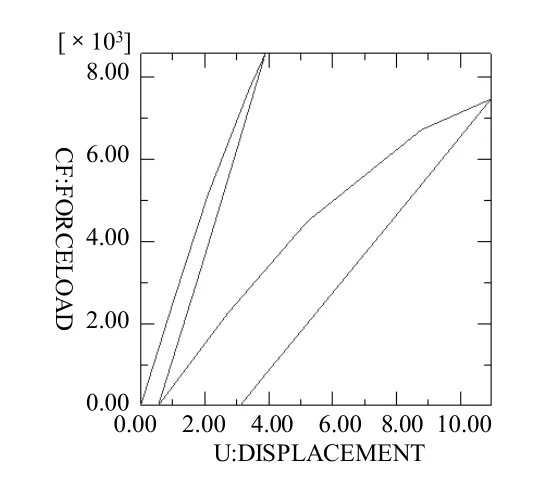
圖10 改進(jìn)方案塑性變形曲線(xiàn)
5、結(jié)束語(yǔ)
本文通過(guò)對(duì)某轎車(chē)拖鉤的有限元仿真分析,找出拖鉤設(shè)計(jì)的不足,并根據(jù)分析結(jié)果給出改進(jìn)方案。通過(guò)對(duì)改進(jìn)方案的校核驗(yàn)證,表明改進(jìn)方案不僅滿(mǎn)足強(qiáng)度要求,且殘余變形也滿(mǎn)足要求。結(jié)果表明CAE技術(shù)對(duì)于提高拖鉤的結(jié)構(gòu)設(shè)計(jì)及改進(jìn)具有一定的指導(dǎo)意義。
參考文獻(xiàn)
[1] 傅薇,張影.轎車(chē)拖鉤強(qiáng)度分析[J], 合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),Vol.32 No.Sup Nov. 2009:101-103.
[2] 何承恩,段大祿.某微車(chē)汽車(chē)牽引鉤擋桿在幾種工況下的強(qiáng)度分析[J],企業(yè)科技與發(fā)展, 2010年第10期:38-42.
[3] 楊海平,王良模,彭曙兮,蘇家竹,袁劉凱. 基于CAE技術(shù)的某越野車(chē)車(chē)架分析[J]. 機(jī)械科學(xué)與技術(shù), 2011, Vol.30 No.6:1001-1006.
[4] 胡玉梅. 車(chē)輛結(jié)構(gòu)強(qiáng)度基本理論與CAE分析技術(shù)[M]. 重慶:重慶大學(xué)出版社,2009.
[5] 石亦平,周玉蓉.ABAQUS有限元分析實(shí)例詳解[M]. 機(jī)械工業(yè)出版社. 2006:166-171.
[6] Altair HyperMorks 7.0 User's Guide[G].Altair Engineering Inc,2000.
Volkswagen Tiguan ESP system fault diagnosis and maintenance
Yang Xuzhi, Liao Zhongwen, Chen Shuguan
(Department of Mechanical and Electrical, Guangdong AIB Polytechnic College, Guangdong Guangzhou 510507)
A 2012 Volkswagen Tiguan electronic parking control unit fault caused while driving in the ESP light is lit. This paper introduces the basic structure and working principle of ESP systems, elaborated the idea of fault diagnosis and removal of, eventually resolved the problems.
ESP systems; Volkswagen Tiguan; diagnosis and maintenance
U472.9
B
1671-7988(2016)01-174-03
楊旭志,就職于廣東農(nóng)工商職業(yè)技術(shù)學(xué)院碩士生,研究方向:汽車(chē)檢測(cè)與維修技術(shù)。
猜你喜歡
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
決策探索(2014年21期)2014-11-25 12:29:50
