西北太平洋海水透明度遙感反演與融合方法?
2016-12-24 02:00:36王曉菲張亭祿施英妮
中國海洋大學學報(自然科學版) 2016年12期
王曉菲, 張亭祿, 田 林, 施英妮
(中國海洋大學信息科學與工程學院,山東 青島 266100)
?
西北太平洋海水透明度遙感反演與融合方法?
王曉菲, 張亭祿, 田 林, 施英妮
(中國海洋大學信息科學與工程學院,山東 青島 266100)
海水透明度是描述海水光學特性的一個重要參數。論文首先利用現場測量的遙感反射率和透明度數據建立了西北太平洋的透明度遙感反演模型,并應用于Seawifs、MODIS-aqua、MOIDS-terra及MERIS Level 2反射率數據,獲取西北太平洋的透明度數據。然后將平均法、最優插值法2種融合方法分別應用于上述4顆衛星的透明度數據進行數據融合,并用現場測量的同步透明度數據對融合后的產品進行了印證。另外,利用2種融合方法分別對西北太平洋2007年Seawifs、MODIS-aqua、MODIS-terra和MERIS4顆傳感器的透明度數據進行了月融合,分析了融合的西北太平洋的時空分布特征。研究結果表明,融合數據大幅度提高了空間覆蓋率,并具有較高可信度。平均法和最優插值法兩種融合方法性能有較大的不同,平均法對細節特征保留的較好,且具有較高的運行速度,但有時空間覆蓋率仍不能滿足要求;最優插值法具有高的空間覆蓋率,但其運行速度較慢。
海水透明度; 遙感反演方法; 西北太平洋; 數據融合
海水透明度(Secchi disk depth)是描述海水光學特性的參數之一,與海水懸浮體、浮游植物及黃色物質等光學活性物質的含量密切相關。傳統測量方法是利用塞克盤現場實測,盡管操作簡單但獲取的是離散數據同步性較差,不能滿足實時監測的需求。與傳統方法相比,遙感技術具有探測范圍廣、采集數據快、動態覆蓋等優勢。隨著衛星遙感技術的發展,特別是遙感器性能、大氣校正技術、水色信息提取模式精度的提高,使實時、大范圍海水透明度衛星遙感監測成為可能[1]。
近年來,國內外開展了很多關于海水透明度遙感反演方面的研究[2],其遙感估算方法主要有經驗方法和半分析法2種。經驗方法是通過建立遙感數據與實測數據之間的回歸模型實現海水透明度的反演,其中常用的有兩波段比值法和多波段比值法等。半分析法是以光在水下的輻射傳輸理論為基礎,通過構建實測透明度與水體固有光學參數的關系,估算海水透明度。
目前大部分海色衛星是極軌衛星,在運行過程中受到云、太陽耀斑、氣溶膠過厚等的影響,有效采樣率較低,產品精度不高。為了充分利用水色衛星的數據,提高數據的覆蓋率,須采用多傳感器融合技術擴展數據覆蓋范圍,提高時間分辨率和空間覆蓋率。主要的融合方法有平均法[3]、客觀分析法[4]和生物光學模型法[5]等。太平洋海洋環境變化對全球氣候變化起著重要作用,是有關科學家研究海洋與大氣相互作用的重要區域。發展長時間連續的海洋觀測技術,提高太平洋海洋環境與氣候預測能力,對科學研究具有重要的意義。
本文以西北太平洋為研究海域,以SeaWIFS, Aqua, Terra和Meris 4顆傳感器獲取的透明度數據為對象,比較2種融合方法(平均法及最優插值法)性能, 以現場測量的同步透明度數據對融合產品進行印證。在此基礎上,獲取長時間高質量連續的透明度數據,為研究西北太平洋水下光學環境及生態環境的變化提供技術保障。
1 數據
1.1 現場測量數據
現場數據用于建立西北太平洋透明度遙感反演算法以及檢驗評價最優插值和平均法2種融合方法的性能。本文所用的是SeaBASS數據庫東太平洋、2007年東中國海以及2013年黃渤海的現場測量數據,包括海水透明度測量數據、現場輻射測量數據及光學性質數據等。滿足本研究的數據共72個站位,其中49組數據用于建立透明度遙感反演模型,另外23組數據用于檢驗透明度反演模型的性能。
1.2 衛星遙感數據
本文融合使用的衛星遙感數據是SeaWIFS、Aqua、Terra、Meris 4個傳感器的Level-2數據,空間分辨率為1 000 m, 所用數據均來自NASA GSFC水色數據網。
2 透明度遙感反演方法
2.1 半分析方法
根據Tyler[6]和Preisendorfer[7]提出的理論,光在介質中傳播時,海水透明度可由垂直方向的明視對比度衰減函數得到,表達式由(1)所示。

(1)
式中:SDD為透明度;Kd(λ)為可見光的垂直衰減系數;c(λ)是可見光的光束衰減系數;C0為塞克盤與背景水體的固有對比度;Cmin表示能被人眼識別的最小對比度。由于490nm處的光波可以穿透更深層的海水,因此基于490nm能更好的表示明視對比度的衰減,耦合常數γ0的計算公式如(2)。

(2)
其中:RSD(490)為塞克盤的反射率;R∞(490)為背景環境的反射率。根據Doron[8]等的研究表明,Kd(λ)+c(λ)與Kd(490)+c(490)存在很強的相關性。因此,可以將透明度表示為關于Kd(490)+c(490)的函數,本文利用49組現場測量的海水透明度和輻射測量數據擬合SDD和Kd(490)+c(490)之間的關系,由圖1可知兩者之間具有較好的相關性(相關系數為0.96),用二次多項式回歸得到由Kd(490)和c(490)計算海水透明度的公式:
lg(1/SDD)=0.43×(-1.78+0.82x+
0.008 6x2),
(3)
式中:x=ln(Kd(490)+c(490)),根據Lee等[9]算法,490nm處漫射衰減系數Kd(490) 可由490nm處水體總的吸收系數a(490)和后向散射系數bb(490)計算得到:
Kd(490)=(1+0.005θS)×a(490)+4.18×(1-0.52×e-10.8×a(490))×bb(490)
(4)
公式(4)中θs為太陽高度角,a(490)和bb(490)可由QAA算法求出。衰減系數c(490)可表示為490nm波段水體的總吸收系數和散射系數之和。
如公式(5)所示:
c(490)=a(490)+b(490),
(5)
可由散射系數與后向散射系數的關系[10]反推得到:
bb=0.001 200+0.005 085×b+0.003 206×b2。
(6)
通過以上分析可知,只要由QAA算法求出a(490)和b(490)便可通過式(3)計算海水透明度,圖2顯示了利用半分析算法得到的海水透明度與實測值的比較。QAA算法是Lee 等[11]在2002年提出的利用遙感反射率計算海水固有光學特性的一種反演算法,參考波長可選用550、555、560nm,本文選用555nm作為參考波長。
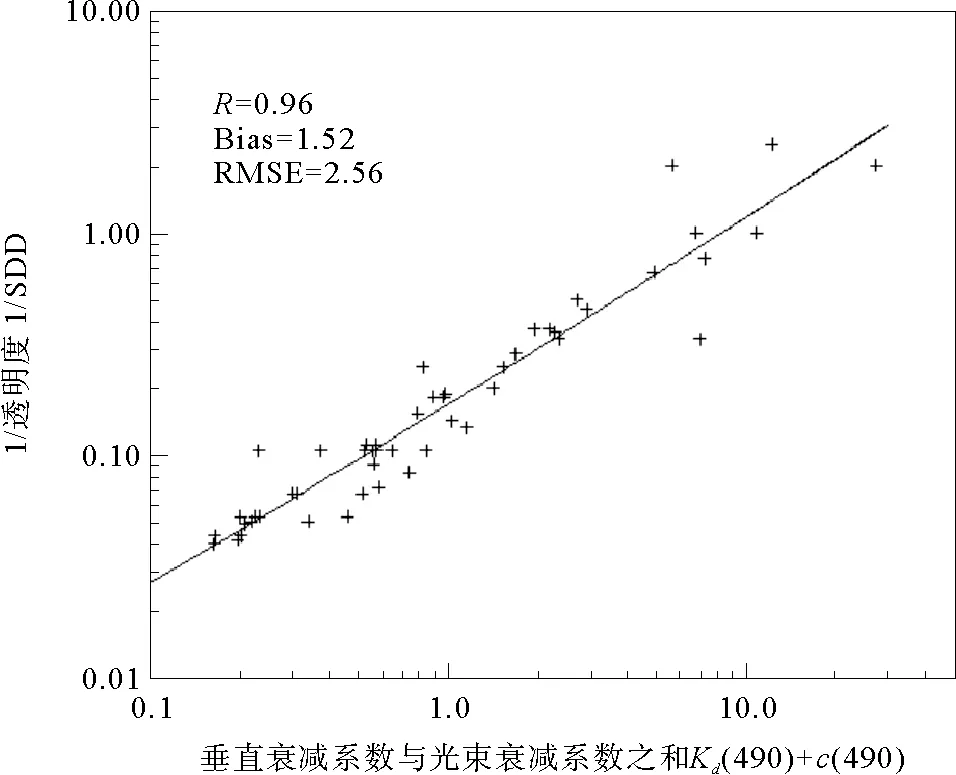
圖1 SDD與Kd(490)+c(490)的相關關系
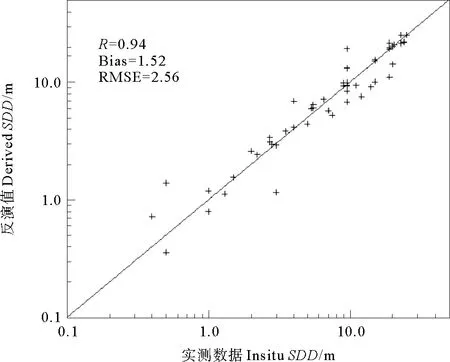
圖2 半分析算法透明度反演值與實測值比較
2.2 經驗算法
波段比值法是反演水體參數的常用方法,Dekker[12]研究表明,波段比值與海水透明度有較高的相關性。經過分析大量的水色現場測量數據發現,490與555 nm波段遙感反射率的比值與透明度的相關性最高。
利用構建半分析算法的49組數據,將透明度現場測量數據與兩波段實測遙感反射率數據做匹配相關,兩者的相關系數為0.95(見圖3),并結合由式(2)計算得到的耦合常數γ0建立西北太平洋遙感經驗反演方法如式(7)。圖4顯示了利用式(7)計算得到的海水透明度與實測值的比較。

(7)
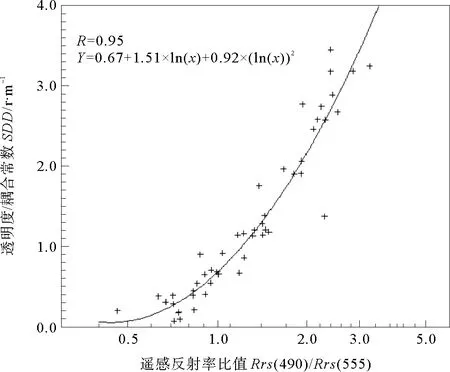
圖3 海水透明度與Rrs(490)/Rrs(555)的相關關系
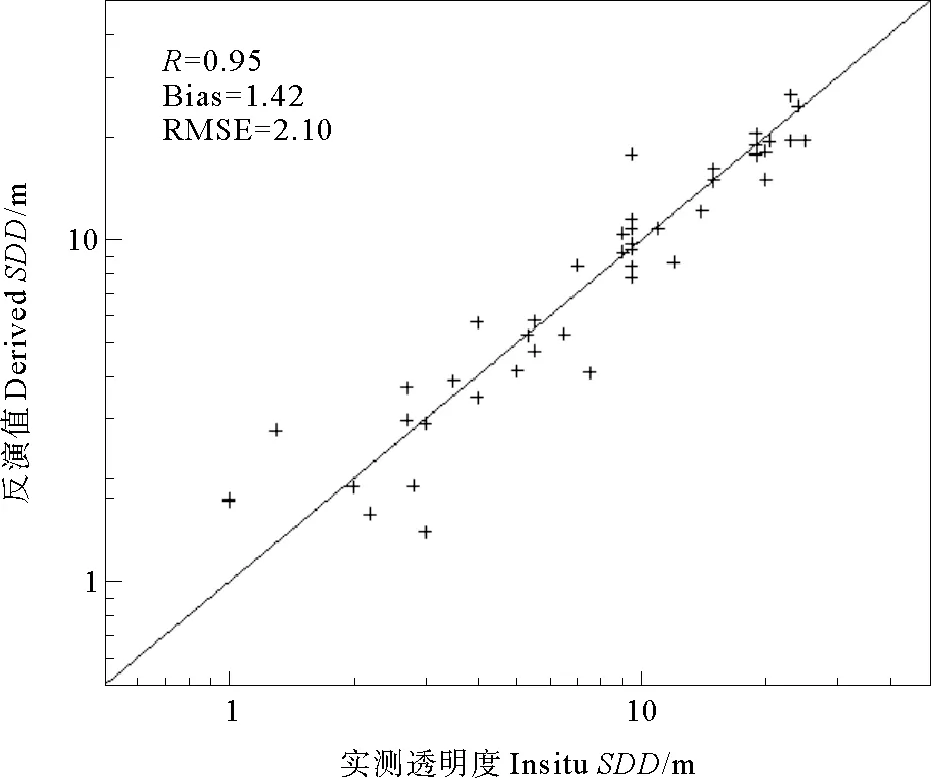
圖4 經驗算法透明度反演值與實測值比較
2.3 比較與分析
分別利用上述兩種方法對另外23組數據進行海水透明度的反演,同時分別計算2種方法得到的透明度反演值與相應實測值的相關系數(R),均方根值(RMSE),平均誤差(Bias),通過對統計參數的比較定量的分析評價2種反演方法。
由圖5可以看出,相對于半分析反演方法,利用經驗算法反演得到的海水透明度值與實測值的相關性更好且誤差較小,經驗方法更適用于本文目標海域海水透明度的反演。因此,本文選用經驗方法作為海水透明度的遙感反演方法。

圖5 透明度反演值與實測值比較
3 多傳感器數據融合
3.1 數據預處理
衛星遙感成像時,由于傳感器對地方位角、高度以及地球自轉等影響,可能造成遙感圖像相對于地面目標觀測物發生幾何形變,此外,不同傳感器的性能及其輻射校正方法不同也會造成產品的不一致。因此,在進行多衛星傳感器數據融合前,需要先對各個傳感器的衛星數據做預處理,包括交叉校正和標準網格化2個步驟。
3.1.1 衛星數據交叉校正 交叉校準主要有衛星數據與現場測量數據匹配校準和衛星傳感器之間校準2種方式。衛星數據與現場測量數據的匹配校準是通過船舶追蹤走航或者布放浮標等方式對衛星傳感器進行跟蹤校準,但是這種方法實施比較困難。衛星之間的交叉校準是選擇數據精度較高的傳感器作為基準傳感器,建立待校準傳感器與基準傳感器的觀測值之間的相關關系,利用基準傳感器的數據和兩者之間的相關關系校準待校準傳感器的數據。美國NASA對Auqa數據做了長時間的校準和驗證工作,結果表明,Aqua數據具有較好的準確性和穩定性[13],本文選擇Aqua傳感器作為基準傳感器對其它傳感器的數據進行交叉校準。
3.1.2 數據標準網格化 多衛星數據融合是基于標準網格化的Level3數據實現的[13],因此,融合前需要根據所用衛星傳感器的分辨率和覆蓋率定義標準網格,將各傳感器的數據重投影到標準網格上[14],得到統一的標準網格化數據。
衛星數據的重投影即對數據的一個重采樣過程,重采樣必然導致圖像信息的丟失,因此最大限度的保持原始圖像的信息是選擇重采樣方法的一個重要指標。本文選用通量守恒重采樣法作為數據的重投影方法。通量守恒重采樣法是一種基于多邊形切割算法的重采樣方法,相較于常用的最鄰近插值法、雙線性插值法和三次卷積插值法,通量守恒重采樣法更好的保持了原始圖形的信息,采樣精度更高,更適用于衛星遙感圖像的重采樣[15]。
3.2 數據融合方法
3.2.1 平均法 平均法簡單,計算速度快,是目前水色產品融合的業務化算法[3]。平均法是假定各傳感器數據之間的權重相同,對融合格點處多個待融合傳感器的有效觀測值做加和平均。
(8)
式中:C代表利用經驗算法由傳感器S數據反演得到的海水透明度值;n代表待融合傳感器S的有效觀測值個數;i、j代表網格點的位置。
3.2.2最優插值法 最優插值算法(Optimum Interpolation, OI)[16],是利用格點處的背景場值加上修正值得到該格點分析值的一種客觀分析方法。修正值是由該格點周圍有效觀測值與背景場值的偏差加權求得。
(9)
式中:Ag是第g個插值格點處的分析值;Bg是第g個格點處的背景值;N是格點g周圍有效觀測點的個數;Oi是第i個觀測點處的觀測值;Bi是i點的背景值;Wi是觀測點i的權重,是使得網格點分析值的誤差達到最小的值:

(10)
(11)
rz和rm分別代表格點i、j之間的徑向和緯向距離,Lz和Lm分別代表2個方向上的影響半徑,本文中Lz和Lm均取值為25km。
最優插值算法中的背景場是對觀測值的一個初估值,本文使用前2年相同季節月份的各衛星數據,利用經驗算法反演得到的海水透明度求平均作為背景場。
3.3 數據融合結果評價方法
融合數據的評價與單傳感器的評價方法類似,主要是通過分析現場測量數據與相應匹配點衛星數據的相關統計參數評價融合產品,用于評價分析的統計參數為:均方根誤差(RMSE)、平均誤差(Bias)、相關系數(R)和數據空間覆蓋率。
匹配點從定義的空間和時間窗口內選取,空間上,選取衛星數據所在位置周圍3×3或5×5像素的正方形區域作為空間窗口[17];時間上,衛星過境時間與現場測量時間的時間差定義為衛星過境前后3、4個小時[18],但是由于融合數據是由多個衛星的數據進行融合,不存在一個精確的時間點,因此選取融合的第一顆衛星和最后一顆衛星過境時間前后3、4個小時間隔內的現場測量數據與融合數據匹配。
4 結果
4.1 融合產品評價
在實現海水透明度遙感數據反演算法的基礎上,利用上述2種融合方法分別融合了由Modis-aqua、Modis-terra、Seawifs和Meris 4顆衛星遙感數據反演得到的海水透明度數據,獲得2007年西北太平洋海水透明度的日融合數據。將透明度日融合數據與現場測量數據做時空匹配,比較分析相關統計參數,定量的評價融合產品的質量。此外,統計比較單傳感器數據與融合數據的日平均覆蓋率。
4.1.1融合產品印證 設置時間、空間匹配窗口對實測SDD數據與融合SDD數據印證比較,定量評價平均法和最優插值2種融合方法。4四顆衛星的過境時間:MERIS(10:00),Terra(10:30),SeaWIFS(12:00),Auqa(13:30),因此,實測數據與融合數據進行匹配時,設置時間窗口為MERIS過境前3個小時至MODIS-auqa過境后3個小時,即上午7:00到下午4:30之間,空間匹配窗口則設置為衛星融合數據3×3像素大小的正方形區域,即選取與實測數據相同位置融合數據周圍3×3窗口內有效數據的平均值作為匹配數據,根據上述匹配規則本文選取了9個點進行印證。利用定義的時間窗口將實測數據與多衛星融合數據做匹配,并通過計算均方根值(RMS)、平均誤差(Bias)、相關系數(R)等統計參數,定量的評價融合數據。圖6顯示了2種數據融合方法得到的海水透明度數據與實測數據的比較。同時顯示了兩種融合方法的定量統計參數。由圖6可知,2種融合方法得到的融合數據與實測數據的相關性均大于0.9,相關性較好,綜合統計參數分析,最優插值法比平均法好些。
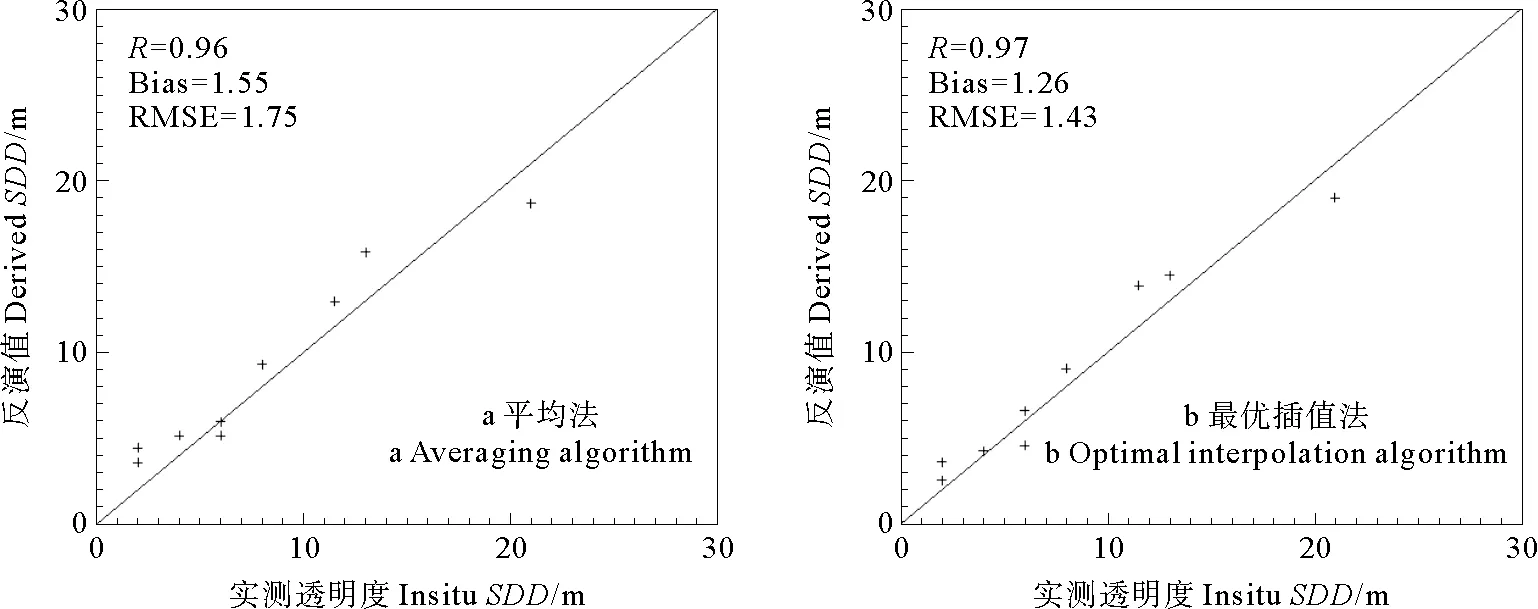
圖6 海水透明度融合數據與實測數據比較
4.1.2 覆蓋率比較 圖7顯示了2007年11月4顆衛星數據以及融合數據的月覆蓋率和平均日覆蓋率。可以看出,4顆衛星數據融合后,月覆蓋率和日平均覆蓋率都有提高。其中,用于最優插值法的背景場數據覆蓋率為100%,因此最優插值融合算法對覆蓋率的提升效果最好,覆蓋率為100%。
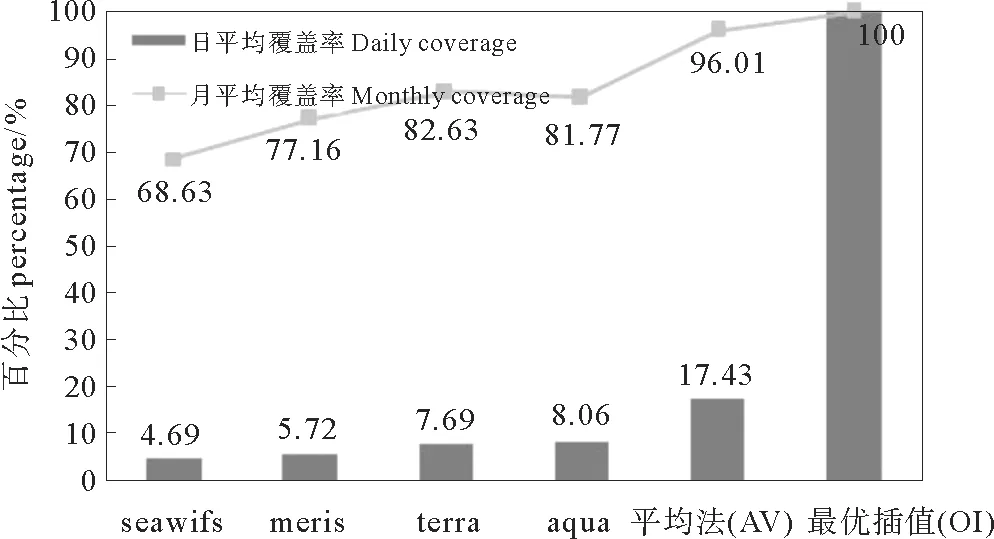
圖7 不同融合方法數據覆蓋率比較
4.2 海水透明度月平均融合數據
基于上述西北太平洋海水透明度反演模型,利用平均法、最優插值法對2007年MERIS、Terra、SeaWIFS和Auqa 4顆傳感器的海水透明度數據進行月融合。圖8顯示了西北太平洋5(春)、8(夏)、11(秋)、2月(冬)月融合的海水透明度分布,融合數據的空間分辨率為4 km。
另外,為了定量分析不同海域海水透明度的時間變化趨勢,從黃海、東海、日本海和日本海以南等海域分別選取4個代表性的點(如圖9所示的A、B、C和D點)進行分析。4個代表性點透明度隨時間的變化趨勢如圖10所示。
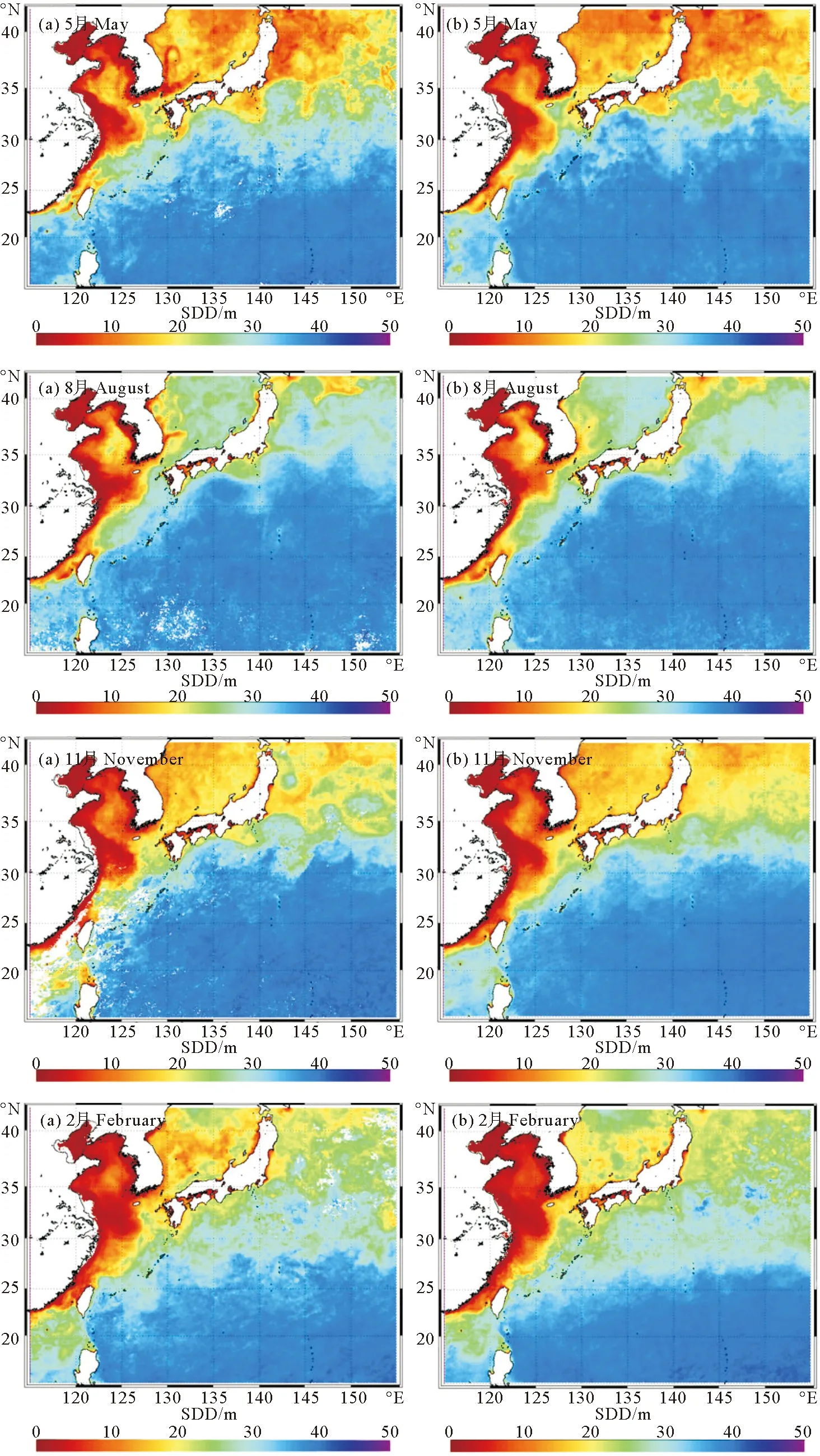
(a、b分別利用平均法、最優插值法融合。a is obtained by Averaging algorithm ;b is obtained by optimal interpolation algorithm.)
由圖8可以看出,西北太平洋逐月透明度空間分布特征基本一致,即:近岸低,遠岸高。總體來看,東中國海受陸源影響嚴重,透明度較低。其中,渤海的透明度最低。黃海的透明度大于渤海,透明度空間變化較大,但基本呈現近岸低、中央高的格局。東海海區由大陸架淺水區向大陸架深水區,透明度呈增大趨勢,長江口附近有一舌狀低透明度區域。中高緯度海域(日本海以及日本海以東洋面)海水透明度相對東中國海稍高,季節變化顯著。日本以南的大洋海域,受陸地影響小,海水透明度最高。
結合圖8、10分析各海域海水透明度季節分布特征。可以看出,東中國海具有夏季高、春秋次之、冬季最低的特征。該結果與1959—1979年[19]和1972—1987年[20]等多年實測數據相一致。冬季,東中國海各個海區透明度均較低,其中渤海透明度最低;春季,高透明度區域明顯比冬季增大,長江口外側海域低透明度的大水舌面積減小;夏季,長江口外測海域舌狀低透明度區域進一步縮小,浙江沿岸低透明度范圍縮小;秋季,黃海中部海域透明度減小,長江口外側舌狀低透明度區域范圍擴大。長江汛期一般都是在夏季,冬季則為枯水期,研究表明,長江汛期的徑流量和輸沙量是枯水期的幾倍甚至是十幾倍[21]。

圖9 點位分布圖
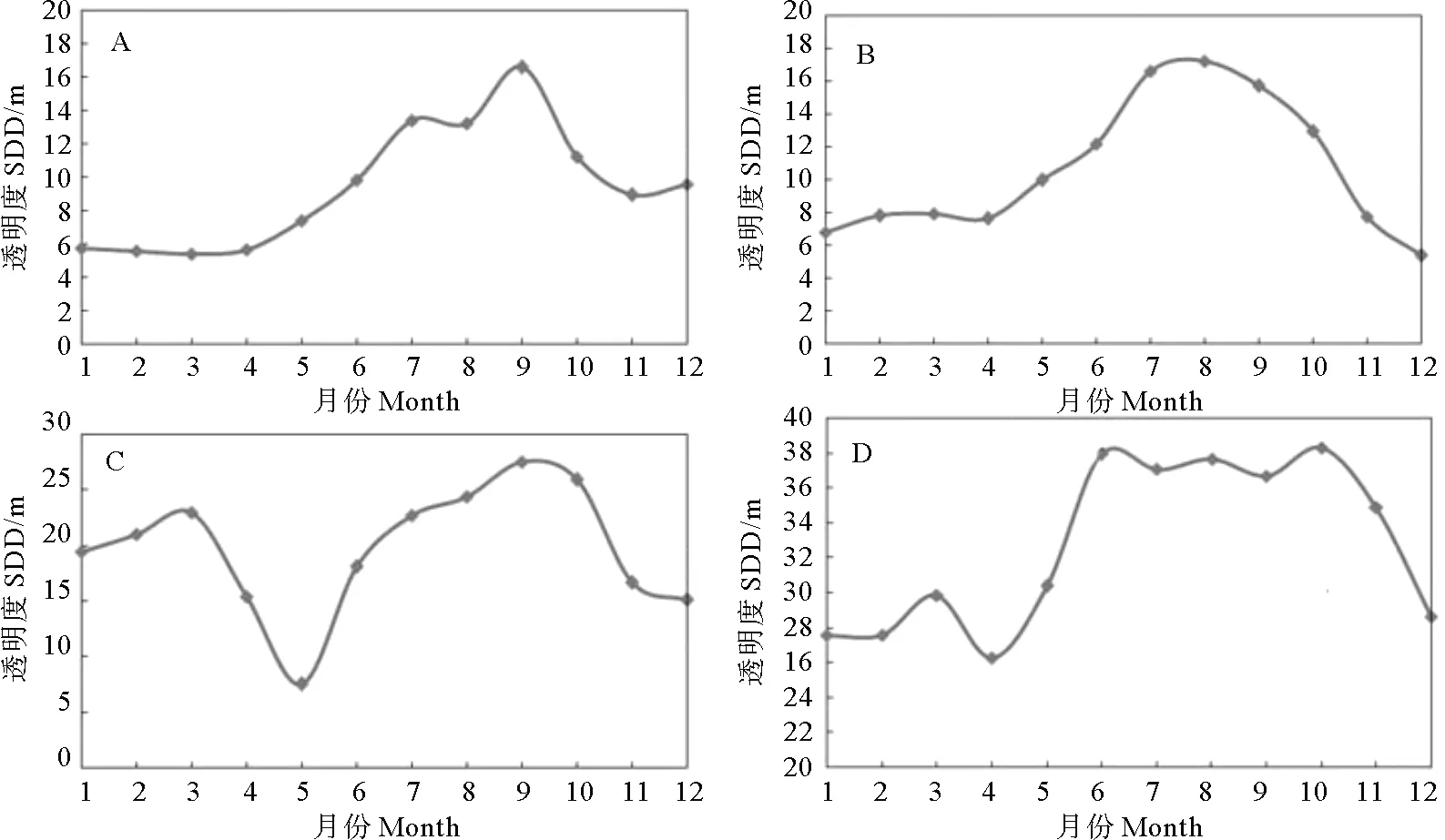
圖10 目標(A、B、C、D)海域海水透明度逐月變化圖
而從圖6中可以看出,冬季長江口外側海域低透明度舌狀區域明顯比夏季大,這說明入海徑流不是造成冬季長江口外側大面積低透明度區域的主要原因,此海區海底表層沉積物以黏土和細砂等小顆粒物為主,冬季風力遠大于夏季,風浪對海底表層沉積物的再懸浮作用可能是造成這種結果的主要原因。
日本海與東中國海透明度季節變化略有不同,時間上呈現夏季高、秋冬次之、春季最低的特征。這與陳小燕[22]在西北太平洋長時間序列浮游植物的多尺度變化研究中所示的葉綠素a濃度季節變化相符,即此海區葉綠素a濃度高的季節,海水透明度低,反之亦然。因此,浮游植物很可能是影響這一海區透明度的主要原因。日本以東洋面海水透明度時間上也呈現出夏季高、秋冬次之、春季最低的特征。西北太平洋的開闊海域則全年透明度較高。
總體上,利用2種融合方法所得的多衛星融合數據覆蓋率得到很大提高,最優插值融合法更是得到百分百的數據覆蓋率。通過對2種融合方法所得數據的對比分析可知,2種方法融合后海水透明度有相似的分布結構,但是由于最優插值法是基于背景場進行融合,透明度的一些細節分布不能很好的體現。
5 結論
基于 2007年東中國海、2013年黃渤海以及SeaBASS數據庫東太平洋的現場測量數據,利用半分析法、經驗比值法2種方法建立西北太平洋海水透明度反演模型,經過對比分析發現,經驗比值法更適用于此海域海水透明度的反演。因此,將建立的經驗反演模型應用于2007年MERIS,Terra,SeaWIFS和Auqa 4顆傳感器數據,利用平均法、最優插值法融合4顆傳感器反演所得的海水透明度數據,獲取西北太平洋海水透明度月融合數據。對比分析結果顯示,兩種融合方法得到的西北太平洋海水透明度時空分布特征相似,與以往有關研究結果吻合。利用現場實測數據對融合數據進行匹配驗證,結果表明融合數據具有較高的可信度,同時融合數據有效的提高了數據覆蓋率。值得說明的是,由于最優插值法是基于背景場進行融合,雖然覆蓋率達到百分之百,但一些細節特征模糊化。因此,在選擇融合方法時要根據需求結合各融合方法的特點進行選擇。
[1] 何賢強, 潘德爐, 黃二輝, 等. 中國海透明度衛星遙感監[J]. 中國工程科學, 2004, 6(9): 33-37. He Xianqiang, Pan Delu, Huang Erhui, et al. Monitor of water transparency in the China Sea by using satellite remote sensing[J]. Engineering Science, 2004, 6(9): 33-37.
[2] 禹定峰, 邢前國, 施平. 內陸及近岸二類水體透明度的遙感研究進展[J]. 海洋科學, 2015, 39(7):136-144. Yu Dingfeng, Xing Qianguo, Shi Ping. A review on the estimation of secchi disk depth by remote sensing in inland and nearshore case 2 waters[J]. Marine Sciences, 2015, 39(7):136-144.
[3] Gregg W W. Ocean-Colour Data Merging[R]. Reports of the International Ocean-Colour Coordinating Group, IOCCG, Dartmouth, Canada, 2007.
[4] Le Traon P Y, Nadal F, Ducet N. An improved mapping method of multisatellite altimeter data[J]. Journal of Atmospheric and Oceanic Technology, 1998, 15(2): 522-534.
[5] Maritorena S, d′Andon O H F, Mangin A, et al. Merged satellite ocean color data products using a bio-optical model: Characteristics, benefits and issues[J]. Remote Sensing of Environment, 2010, 114(8): 1791-1804.
[6] Tyler J E. The Secchi disc. Limnology and Oceanography. 1968, 13: 1-6.
[7] Preisendorfer R W. Secchi disk science: Visual optics of natural waters[J].Limnology and Oceanography, 1986, 31(5): 909-926.
[8] Doron M, Babin M, Mangin A, et al. Estimation of light penetration, and horizontal and vertical visibility in oceanic and coastal waters from surface reflectance[J].Journal of Geophysical Research, 2007, 112(C6): 101-107.
[9] Lee Z P, Du K P, Arnone R. A model for the diffuse attenuation coefficient of downwelling irradiance[J]. Journal of Geophysical Research, 2005, 110(C2).
[10] Haltrin V I, Lee M, Shybanov E, et al. Relationship between backscattering and beam scattering coefficients derived from new measurements of light scattering phase functions[R]. Naval Research Lab Stennis Space Center MS, 2002.
[11] Lee Z P, Carder K L, Arnone R A. Deriving inherent optical properties from water color: a multiband quasi-analytical algorithm for optically deep waters[J]. Applied Optics, 2002, 41(27): 5755-5772.
[12] Dekker A G. Detection of Optical Water Quality Parameters for Entrophic Waters by High Resolution Remote Sensing[M]. Netherlands: Free University The Netherlands, 1993.
[13] Fargion G S, McClain C R. MODIS Validation, Data Merger and Other Activities Accomplished by the SIMBIOS Project, 2002-2003[M]. Maryland: Goddard Space Flight Center, 2003.
[14] 田璐, 艾松濤, 鄂棟臣, 等. 南大洋海冰影像地圖投影變換與瓦片切割應用研究[J]. 極地研究, 2012, 24(3): 284-290. Tian Lu, Ai Songtao, E Dongchen, Gong Hongqing,Application Of sea ice map projection transformation and tile cutting over the antarctic ocean[J], Chinese Journal of Polar Research, 2012, 24(3): 284-290.
[15] 田林, 張亭祿, 陳樹果, 等. 衛星遙感融合中通量守恒重采樣方法與其它常用方法的比較[J]. 中國海洋大學學報(自然科學版), 2014, 44(6): 103-108. Tian Lin, Zhang Tinglu, Chen Shuguo, et al. Comparison of flux-conserving resampling method with commonly used Resampling Methods in Merging of Remote Sensing Dara[J]. Periodical of Ocean University of China, 2014, 44(6): 103-108.
[16] Reynolds R W, Smith T M. Improved global sea surface temperature analyses using optimum interpolation[J]. Journal of Climate, 1994, 7(6): 929-948.
[17] Hooker S B, McClain C R. The calibration and validation of SeaWiFS data[J]. Progress in Oceanography, 2000, 45(3): 427-465.
[18] Wang M, Knobelspiesse K D, McClain C R. Study of the Sea-Viewing Wide Field-of-View Sensor (SeaWiFS) aerosol optical property data over ocean in combination with the ocean color products[J]. Journal of Geophysical Research: Atmospheres (1984-2012), 2005, 110(D10): 85-91.
[19] 張緒琴. 東中國海海水透明度分布特征[J]. 海洋通報, 1983, 2(6): 21-24. Zhang Xuqin. On distribution characteristics of water transparency In the East China Sea[J], Marine Science Bulletin, 1983, 2(6):21-24.
[20] 朱蘭部, 趙保仁. 渤, 黃, 東海透明度的分布與變化[J]. 海洋湖沼通報, 1991, 3: 1-11. Zhu lanbu, Zhao Baoreng. Distributions And Variations of The Transparency In The BOHAI Sea, Yellow Sea And East China Sea[J]. Transactions of Oceanology and Limnology, 1991, 3: 1-11.
[21] 陳國珍. 渤, 黃, 東海海洋圖集水文分冊[M]. 1992. Chen Guozhen. Marine Atlas OF BOHAI Sea Yellow Sea East China Sea: HYDROLOGY [M]. Beijing: China Ocean Press, 1992.
[22] 陳小燕. 基于遙感的長時間序列浮游植物的多尺度變化研究[D]. 浙江: 浙江大學, 2013. Chen Xiaoyan. Multi-Scale Variations in the Long Time Series of Phytoplankton from Satellite Data [D]. Zhe Jiang: Zhe Jiang University, 2013.
責任編輯 陳呈超
Secchi Disk Depth Retrieval and Merging in the Northwest Pacific from Multiple Missions of Ocean Color Remote Sensing
WANG Xiao-Fei, ZHANG Ting-Lu, TIAN Lin, SHI Ying-Ni
(College of Information Science and Engineering,Ocean University of China,Qingdao 266100,China)
Secchi Disk Depth (SDD) is an important indicator which describes water visibility and optical property. Firstly, the inversion algorithm for estimating SDD in the Northwest Pacific Ocean was established using in situ data. Then, the inversion algorithm was applied to the satellites data from four satellite sensors (SeaWiFS, MODIS-Terra, MODIS-Aqua, and MERIS) to obtain the SDD data in the Northwest Pacific Ocean. Secondly, the two kinds of merging algorithm (Averaging algorithm and Optimal interpolation algorithm) were used to generate the merging data from the four satellite sensors, respectively. Meanwhile, the merged results were validated with the matchup in situ data. Finally, the monthly merged data were obtained using the two merging algorithms from the four satellite data in 2007, respectively. The temporal and spatial variations of the SDD in the Northwest Pacific Ocean were analyzed. The results showed the coverage of the merged data products has been significantly improved, and the quality of the merged data products is reliability. In addition, the averaging algorithm has a higher accuracy and running speed, but the coverage of data is not enough sometimes. Optimal Interpolation has the highest spatial coverage, but its running speed is slower.
secchi disk depth; remote sensing algorithm; the Northwest Pacific Ocean; data merging
國家自然科學基金項目(41276041)資助 Supported by the National Natural Science Foundation of China (41276041)
2014-10-25;
2015-05-20
王曉菲(1988-),女,碩士生。E-mail: wangxiaofei1216@163.com
P722;P715
A
1672-5174(2016)12-133-09
10.16441/j.cnki.hdxb.20140258
王曉菲, 張亭祿, 田林, 等. 西北太平洋海水透明度遙感反演與融合方法[J]. 中國海洋大學學報(自然科學版), 2016, 46(12): 133-141.
WANG Xiao-Fei, ZHANG Ting-Lu, TIAN Lin, et al. Secchi disk depth retrieval and merging in the northwest pacific from multiple missions of ocean color remote sensing[J]. Periodical of Ocean University of China, 2016, 46(12): 133-141.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12