面向對象的高分辨率影像土地利用信息提取
2016-12-28 02:20:44金文韜許捍衛李正源王海君
地理空間信息 2016年9期
關鍵詞:分類
金文韜,許捍衛,李正源,王海君
(1.河海大學 地球科學與工程學院,江蘇 南京 210098)
面向對象的高分辨率影像土地利用信息提取
金文韜1,許捍衛1,李正源1,王海君1
(1.河海大學 地球科學與工程學院,江蘇 南京 210098)

運用面向對象的分類方法對實驗區高分辨率影像進行最優分割尺度的影像分割。首先利用ESP算法確定影像的最佳分割尺度,再運用CART決策樹分類對土地利用信息進行提取,并對分類結果進行后處理,進一步提高分類精度。最終分類結果精度達到80.38%。
土地利用;最優分割;面向對象的分類;高分辨率影像
進入21世紀,隨著我國經濟的飛速發展以及人口的激增,土地利用變化更加復雜和多樣化,運用遙感技術更新土地利用基礎圖件已成為國內外土地利用和覆蓋變化研究的重點方向。本文基于高分辨率QuickBird影像,采用eCognition軟件對實驗區影像進行最優分割尺度分割。利用ESP算法確定影像的最佳分割尺度,再利用CART決策樹分類對土地利用信息進行提取,取得了較好分類精度。
1 實驗區和研究數據
實驗區位于長江北岸,南京市浦口區江浦街道,與南京主城區隔江相望,總面積192萬km2。本文選取QuickBird衛星影像[1-2]為現勢的遙感數據,拍攝時間為2012年,包含2.4 m的多光譜波段和0.6 m的全色波段,含紅、綠、藍和近紅外4個波段。經過影像融合、配準和裁剪后,實驗區影像如圖1所示。

圖1 實驗區原始影像
2 研究方法
2.1 最佳分割尺度、精致度和形狀參數的確定
在面向對象的分類方法中首先要確定影像的最佳分割尺度,本文運用ESP分割來確定最佳分割尺度。其主要思想為[3]:以局部方差(LV)的標準偏差均值來代表某塊影像檢查窗口中對象的異質性。因為在分割尺度合適的對象中,像素相互聚集在一起,LV將變低,反之LV將變大。最佳尺度的選擇是一個迭代過程,當前尺度下的LVn值等于或低于前一尺度下LVn-1時,迭代停止;n-1次分割的尺度即為最佳分割尺度。
本文通過ESP分割確定最佳分割尺度為45,并以此為實驗區影像的最佳分割尺度。在確定形狀指數(Shape)時,通過固定緊致度參數(Compactness)為0.6,步長為0.2,改變Shape參數選擇最優的形狀參數,確定Shape參數為0.5最合適;然后固定Shape參數為 0.5,步長為0.2,改變Compactness參數來選擇最優的緊致度參數,最終Compactness參數確定為0.5。
2.2 CART決策樹分類
決策樹[4],即判定樹,是通過節點處的判別式將對象進行區分。CART[5]決策樹遞歸分割數據集,以機器學習形式確定最優的計算變量,再得出各節點的判別式,具有較為簡單、便于計算[6]的特點。樣本載入后,需要為樣本選取訓練的特征集,以構建決策樹形成分類規則[7]。基本訓練選取平均值(Mean)、標準差(Standard Deviation)、貢獻率(Ratio)和亮度值(Brightness)4個特征參與計算,除此之外自定義了4 類指數加以訓練,如表1所示。
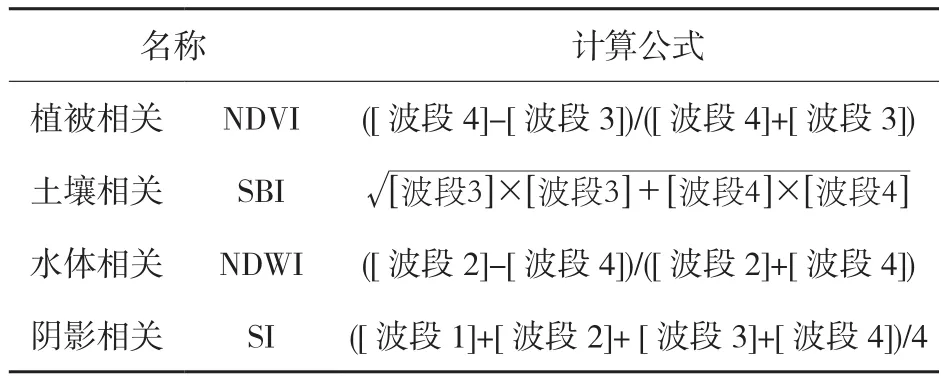
表1 自定義指數表
結合2009年歷史土地利用矢量圖的分類體系和全國土地利用[8]分類編碼,根據實驗區現狀確定土地利用分類體系為采礦用地、草地、茶園、村莊、公路用地、果園、旱地、建筑用地、坑塘水面、林地、河流、農村道路、水田、溝渠、田坎和沼澤等16類
設置決策樹的深度為10,分割節點最小樣本數為5,交叉驗證修剪的最小樣本數為2,通過對選取的2 139 個樣本點和相應特征變量的訓練,得到79個葉節點,每個葉節點表示單條規則,共79條規則。CART決策樹建立并運行后得到分類結果如圖2所示。
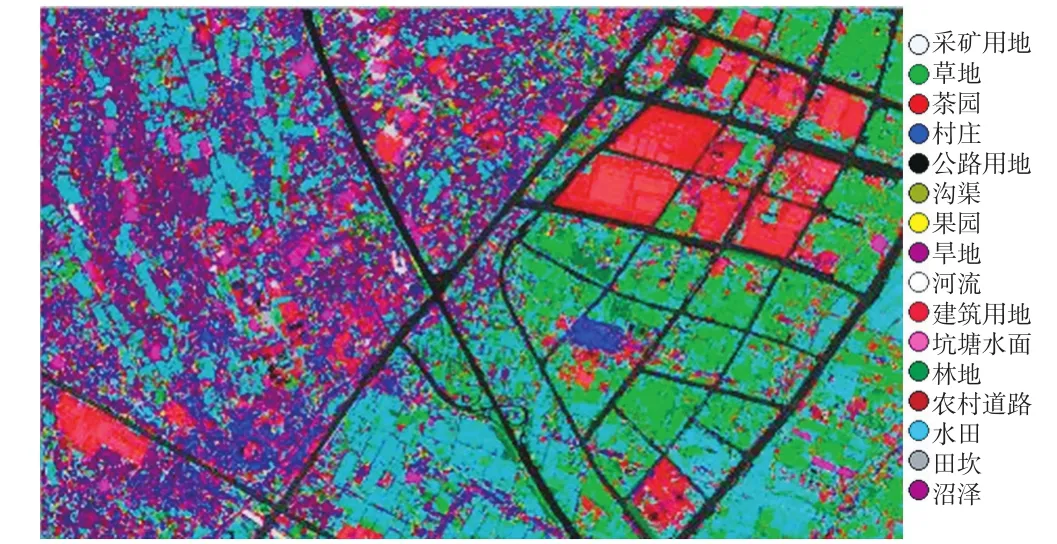
圖2 CART決策樹分類結果
2.3 分類后處理
CART決策樹分類取得了較好的分類結果,但將分類結果放大后就會發現存在坑塘水面與周圍地物混淆、陰影遮擋道路、部分主干道有斷開現象等問題,為提高精度,需要對上述問題進行處理。
1)坑塘水面的完善。在實驗區范圍內,部分坑塘鄰近采礦用地,或被采礦用地包圍,提取時容易被分為采礦用地。由于坑塘水面形狀相對規則,采礦用地大多邊界不規則,因此可運用形狀指數(Shape Index)來區分。形狀指數表示影像對象的面積和周長的關系度,其計算公式為:
式中,by為影像對象的周長;py為對象的面積;邊界越規則,Shape Index值就越小,反之則越大。
2)建筑物地類的完善。由于太陽照射角度和建筑物高度的影響,高層建筑物投射的陰影落在了建筑物影像內部,然而陰影的光譜響應接近于道路的光譜值,所以提取后在建筑物內部會出現塊狀陰影。由于建筑物遮擋引起的陰影與建筑物本身存在共有邊界,可采用類相關特征Rel.border to對建筑物邊緣的陰影進行搜索,同時考慮建筑物在亮度上與陰影的差異,最終選擇Brightness≥300和Rel.border to建筑物≥0.5這兩條規則將陰影歸類為建筑用地類。
3)主干道斷開的連接。由于主干道兩旁的地物較復雜,如周圍存在建筑用地、林地和溝渠等類別,主干道提取結果存在錯分,導致主干道連接中斷。為使道路中斷處順利連接,本文使用區域生長法進行處理。Image Object Fusion算法是一種區域生長算法,此算法的基本原理是[6-7]將需要融合的種子對象通過設置的種子對象周邊候選對象的種類和循環次數,到達填補縫隙的效果。實驗中使用棋盤分割將道路周圍對象分割成細小碎塊,然后采用Image Object Fusion規則使道路在背景對象中融合生長。設置對象為道路周邊的建筑用地和草地,擬合模式設置為best,候選對象、種子對象以及目標對象權重設置為(2,-1,-1);然后使用Connector算法,將道路連接起來。
3 精度檢驗
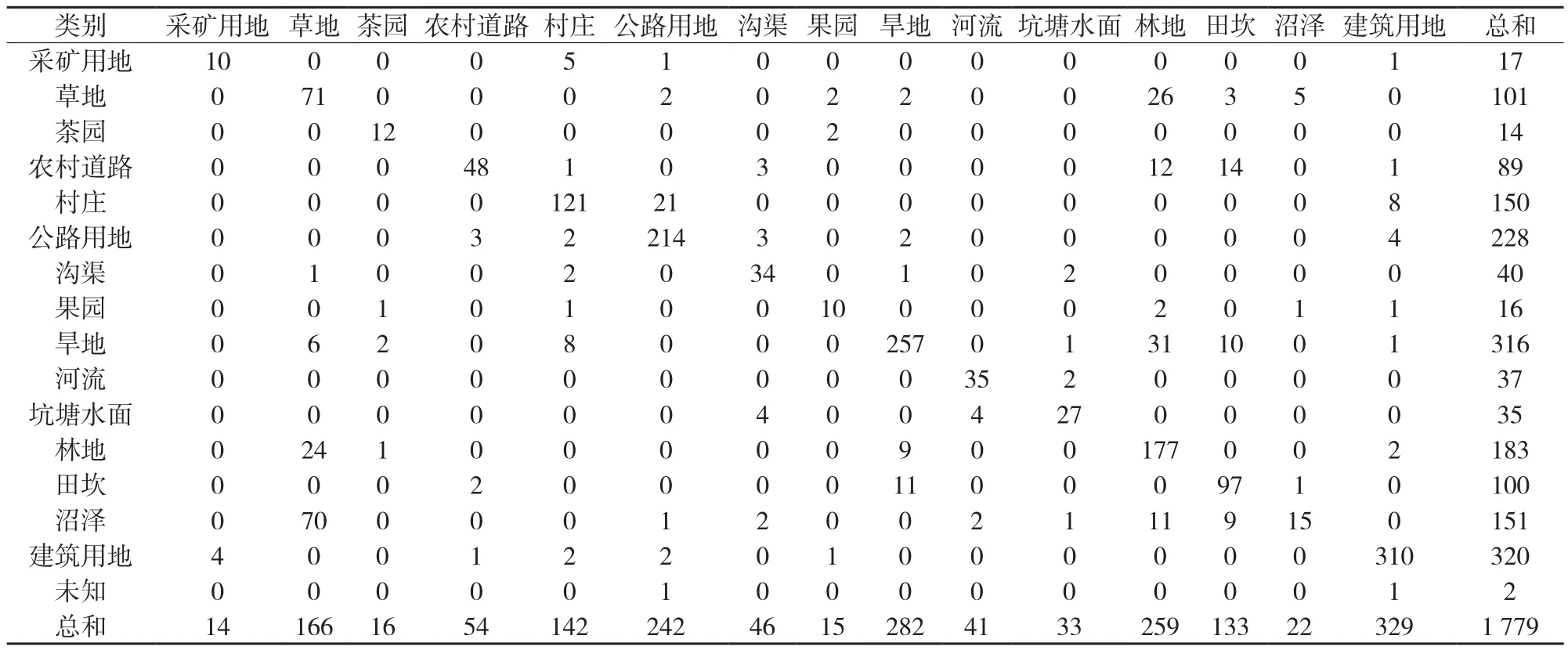
表2 分類精度評價結果
eCognition中提供了2種方式:基于像元的精度評定,即選擇一定樣本數據導入,以這些樣本作為評定的標準導入到相應工程中;基于影像對象的精度評定,即將分割的影像對象選為評定的樣本。結合大比例尺的航片進行檢驗,共選取了1 779個樣本,進行精度評價后總體精度達到80.38%,Kappa系數為0.755 2,精度評價結果見表2。
4 結 語
面向對象的影像信息提取,其關鍵的第一步是影像分割,本文以ESP輔助工具和對比實驗得出最優的分割尺度,充分運用高分辨率影像的光譜、形狀和紋理等特征構建規則集實現對影像信息的提取;運用了CART決策樹分類方法,并對分類結果作相關后處理,進一步提高了影像信息提取的精度,取得良好的分類效果。但在實驗過程還存在不足,如面向對象的信息提取過程不夠自動化,需要耗費一定時間選取最佳分割尺度;參數不能與后面的分類集成于eCognition中;決策樹分類選取的特征變量不夠全面;提取地物信息時沒有運用分層提取的思想以提高效率等。
[1] 蔣永濤.基于QuickBird影像土地利用信息提取研究[D].雅安∶四川農業大學,2009
[2] 田新光.面向對象高分辨率遙感影像信息提取[D].北京∶中國測繪科學研究院,2007
[3] Drǎgu? L, Tiede D, Levick S R. ESP∶ a Tool to Estimate Scale Parameter for Multi-resolution Image Segmentation of Remotely Sensed Data[J].International Journal of Geographical Information Science, 2010,24(6)∶859-871
[4] 葛春青,張凌寒,楊杰.基于決策樹規則的面向對象遙感影像分類[J].遙感信息,2009(2)∶86-91
[5] 趙萍,傅云飛,鄭劉根,等.基于分類回歸樹分析的遙感影像土地利用/覆被分類研究[J].遙感學報,2005,9(6)∶708-716
[6] 齊樂,岳彩榮.基于 CART 決策樹方法的遙感影像分類[J].林業調查規劃,2011,36(2)∶62-66
[7] 陳昌鳴.面向對象的高分辨率遙感影像農村公路專題信息提取[D].重慶∶重慶交通大學,2011
[8] 徐春迪,屈康慶,郭俊理.寶雞市金渭兩區土地利用信息遙感提取研究[J].地理空間信息,2007,5(6)∶39-41
P237
B
1672-4623(2016)09-0104-03
10.3969/j.issn.1672-4623.2016.09.034
金文韜,碩士研究生,主要研究方向為地理信息系統開發與應用。
2015-08-13。
項目來源:國家自然科學基金資助項目(41101308)。
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
