庫爾勒香梨梨柄區域采摘損傷力學模型及試驗研究
2016-12-29 03:21:19王金東蘭海鵬劉文亮李風娟
塔里木大學學報 2016年4期
安 靜 王金東 蘭海鵬 劉文亮 李風娟
(塔里木大學機械電氣化工程學院, 新疆 阿拉爾 843000)
?
庫爾勒香梨梨柄區域采摘損傷力學模型及試驗研究
安 靜 王金東 蘭海鵬 劉文亮 李風娟*
(塔里木大學機械電氣化工程學院, 新疆 阿拉爾 843000)
為研究不同的采摘方式對庫爾勒香梨梨柄區域梨體的損傷程度,本研究基于靜力學思想建立了不同采摘方式對梨柄與梨體接觸位置作用的力學模型,并根據實際采摘要求進行了試驗驗證。試驗結果表明:拉拽、扭轉、彎折三種采摘方式中,拉拽對庫爾勒香梨梨柄區域梨體的損傷程度最小,因此香梨的最佳采摘方式是拉拽,這與基于靜力學思想建立的力學模型分析結果相符。
香梨; 采摘; 損傷機理; 力學模型
香梨柄屬于肉質果柄,即柄在靠近梨的部位有一小部分果肉,梨柄脫落會影響果肉的完整性,對香梨的品質造成一定的影響。為降低采摘環節對香梨品質的影響,要求采摘時把梨柄完好地保留在香梨上,如果采摘方式不當會使梨柄脫落或松動,使香梨腐爛速度加快,且會迅速傳染與其接觸的其它個體,這會給香梨產業造成嚴重的經濟損失。
目前,水果的采收方法有手工采收、機械輔助采收和機械化采收3種[1-2]。我國從90 年代開始,出現了簡易采摘器,用于采摘蘋果、梨、桃等水果的便攜式水果分級采摘器,改變了過去勞動強度大、水果損傷率高、勞動成本高的缺點,使果農的采摘正確率提高、采摘時間縮短[3-5]。隨著果園機械技術的進一步融合,2007 年研制出了第一臺多功能果園作業機,即 LG-1 型多功能果園作業機[6]。2009年研制出了適宜單人操作使用的枸杞采摘機[7]。2010年研制出了4YS-24型紅棗收獲機[8]。總的來說我國采摘機械得到迅速發展,在機械產品方面出現了采摘器、動力剪枝采摘工具、多功能果園作業機械等,但是國內水果采收機械大多功能單一、效率不高,容易損壞果實,產量損失大,容易采摘到不熟果實,且成本較高,果農難以接受應用[9]。
成熟后的香梨皮薄肉脆,不適合機械化采收和分級,所以現階段香梨的采收和分級主要依靠手工方式。本研究從香梨的不同采摘方式入手,研究不同的采摘方式對香梨梨柄的加壓方式,旨在為香梨最佳采摘方式的確定提供技術參考,對于推進香梨產業的技術進步、降低采摘過程中的損傷率,具有十分重要的理論和實踐意義。
1 材料與方法
1.1 試驗材料
試驗材料取材于塔里木大學西區梨園,選擇陽光充足,長勢優良的梨樹作為試驗對象,在香梨采摘季節9月份采用不同的采摘方式隨機從梨樹上采摘香梨。
1.2 試驗方法
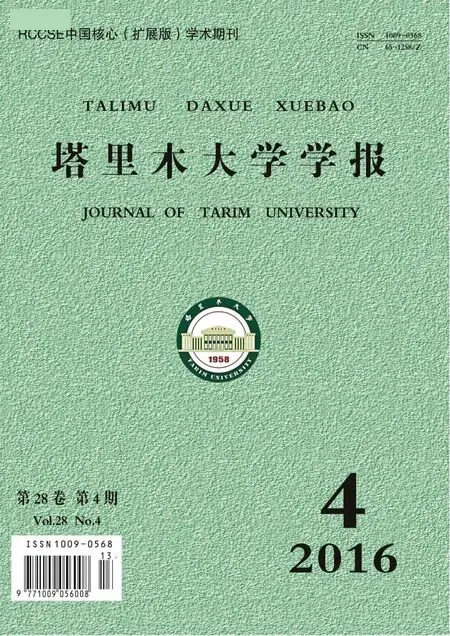
手工方式進行采摘作業時,常用的采摘方式有:拉拽香梨使梨柄與樹干分離即拉斷(圖1);扭轉梨體使梨柄與樹干分離,即扭斷(圖2);彎折香梨使梨柄中間折斷從而與樹干分離,即折斷(圖3)。
無論采用哪種采摘方式,由于香梨自身重力和人為施加外力的作用,都有可能使梨柄靠近梨肉的部分松動,甚至脫落,梨柄的脫落帶掉一部分果肉,影響果肉的完整性,不利于保存,并對香梨的品質造成一定的影響。為降低采摘環節對香梨品質的影響,要求采摘時把梨柄完好地保留在香梨上。
1.3 力學模型的建立
采用拉拽香梨使梨柄與樹干分離的采摘方式時,五指分開,分別握住香梨梨體中部不同的位置,向下拉拽梨體直至梨柄與樹干分離時,拉伸方式采摘圖和受力模型 (F1為使梨柄與樹枝分離時,樹枝對梨柄的最大拉力;五指對梨體的壓力使梨體處于平衡位置,向下的拉力簡化為F2,F1=F2) 如圖1所示:
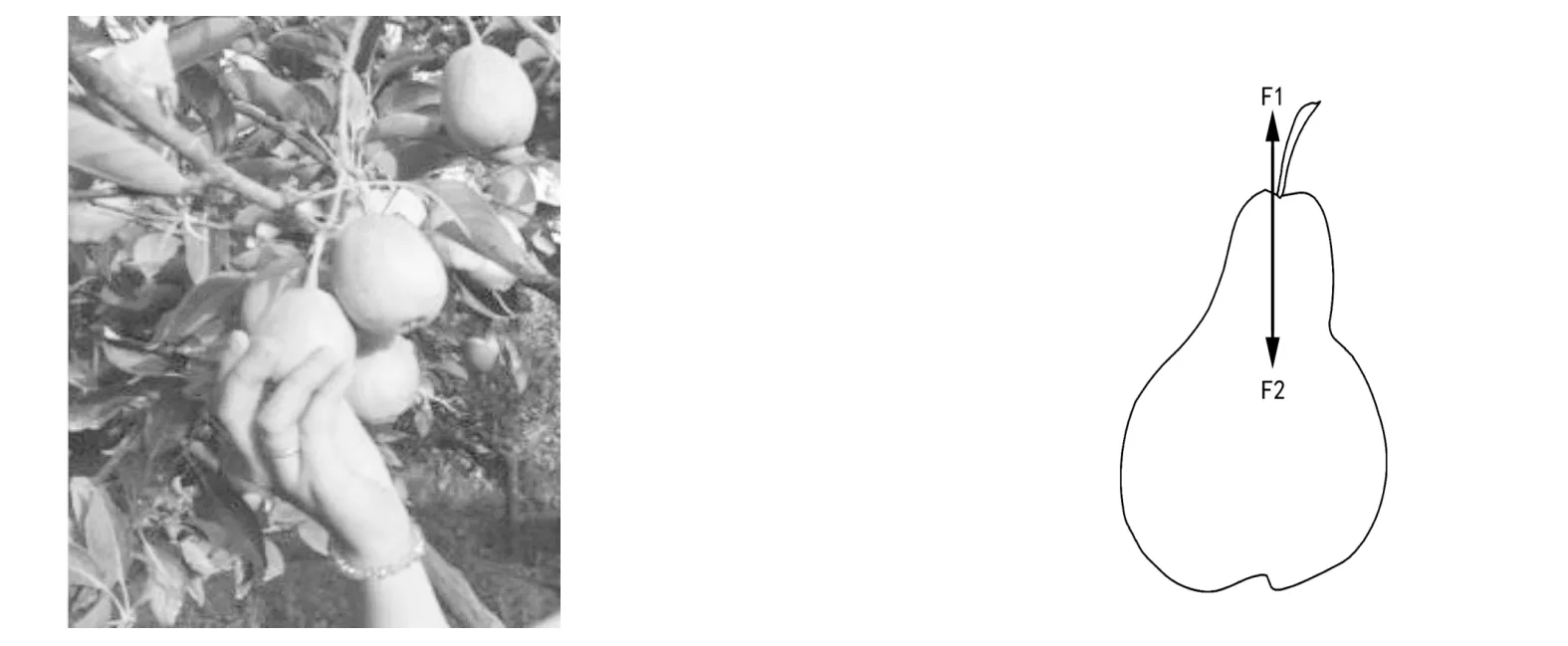
圖1 (a)拉拽方式采摘 圖1 (b)拉拽方式采摘受力模型
采用扭轉香梨使梨柄與樹干分離的采摘方式時,五指分開,分別握住香梨梨體中部不同的位置,扭轉梨體直至梨柄與樹干分離,扭轉方式采摘圖和受力模型 (T1為使梨柄與樹枝分離樹枝對梨柄的最大扭矩;五指對梨體的壓力使梨體處于平衡位置,T2為使梨體產生扭轉的扭矩,) 如圖2所示:
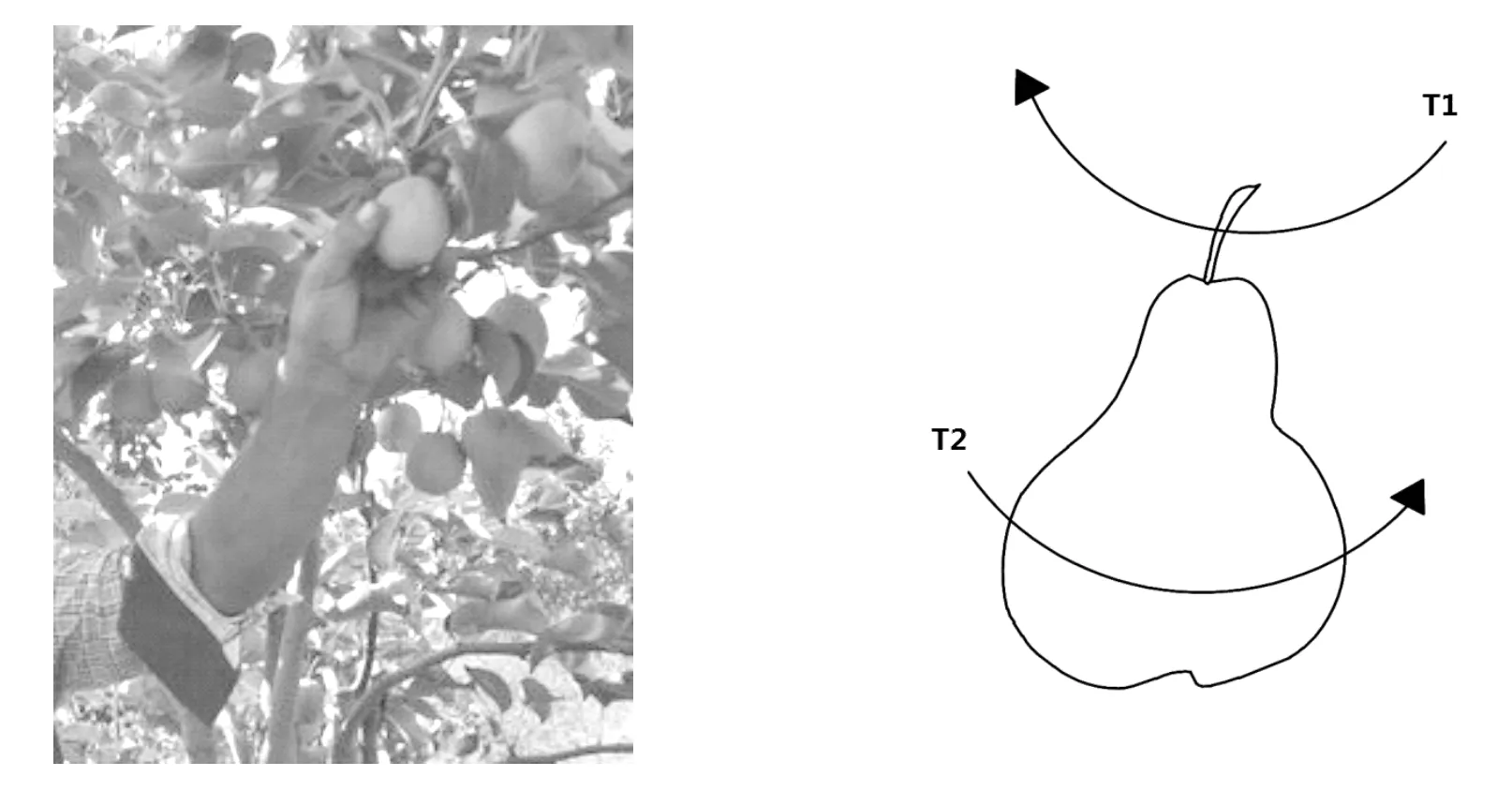
圖2 (a)扭轉方式采摘 圖2 (b)扭轉方式采摘受力模型
采用彎折香梨使梨柄與樹干分離的采摘方式時,五指分開,分別握住香梨梨體中部不同的位置,彎折梨體直至梨柄與樹干分離,彎折方式采摘圖和受力模型 (M1為使梨柄與樹枝分離樹枝對梨柄的反向彎矩;五指對梨體的壓力使梨體處于平衡位置,M2為使梨柄與樹枝分離的彎矩,) 如圖3所示:
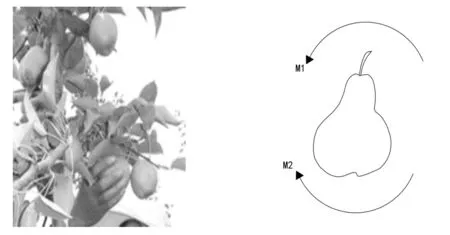
圖3 (a)彎折方式采摘 圖3 (b)彎折方式采摘受力模型
2 結果與討論
2.1 模型分析
把采摘過程看成是靜載過程,從靜力學角度分析不同采摘方式對梨柄的作用情況,從采摘實驗觀察到,梨柄區域梨體的損傷范圍可近似為一圓形,設此圓的半徑為r,則不同的采摘方式對梨柄果肉的應力分別可用以下公式進行計算:
拉伸應力:
(1)
其中F—斷裂荷重(N);A—梨柄區域梨體損傷面積(m2),A=πr2。
扭轉切應力:
(2)
彎曲應力:
(3)

分別采用艾德堡指針式推拉力計NK-20、艾德堡扭矩測試儀HT-20做采摘實驗,測得斷裂荷重平均為11. 5 N,梨柄斷裂扭矩平均為0. 12 N·m,計算得梨柄斷裂彎矩為0. 30 N·m。分別代入上式計算得,拉拽方式梨柄區域所受應力平均值為0. 46Mpa,扭轉方式梨柄區域所受應力平均值為0. 61Mpa,彎折方式梨柄區域所受應力平均值為1. 22Mpa。由此可以看出,拉拽方式對梨柄區域的應力值最小,彎折方式對梨柄區域的應力值最大。
2.2試驗驗證
每種采摘方式收集100顆香梨進行儲存試驗,為減少在運輸過程中的機械損傷,采摘之后立即套袋后裝箱,在相同環境條件下(溫度10 ℃,相對濕度75%)存儲對照,觀察不同的采摘方式下,香梨的腐壞情況見圖4和圖5,具體數據見表1。
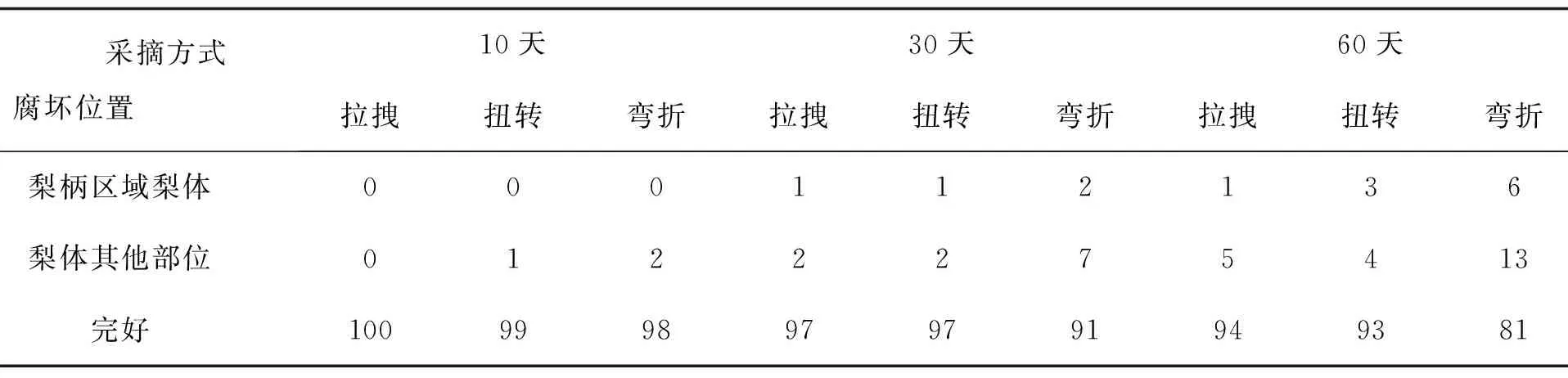
表1 香梨儲存試驗結果
由上表可以看出,拉拽采摘方式中梨柄位置梨體的腐壞率為1%,總腐壞率為6%,梨柄區域梨體的腐壞率占總腐壞率的比為16. 67%;扭轉采摘方式中梨柄區域梨體的腐壞率為3%,總腐壞率為7%,梨柄區域梨體的腐壞率占總腐壞率的比為42. 86%;彎折采摘方式中梨柄區域梨體的腐壞率為6%,總腐壞率為19%,梨柄區域梨體的腐壞率占總腐壞率的比為31. 58%。
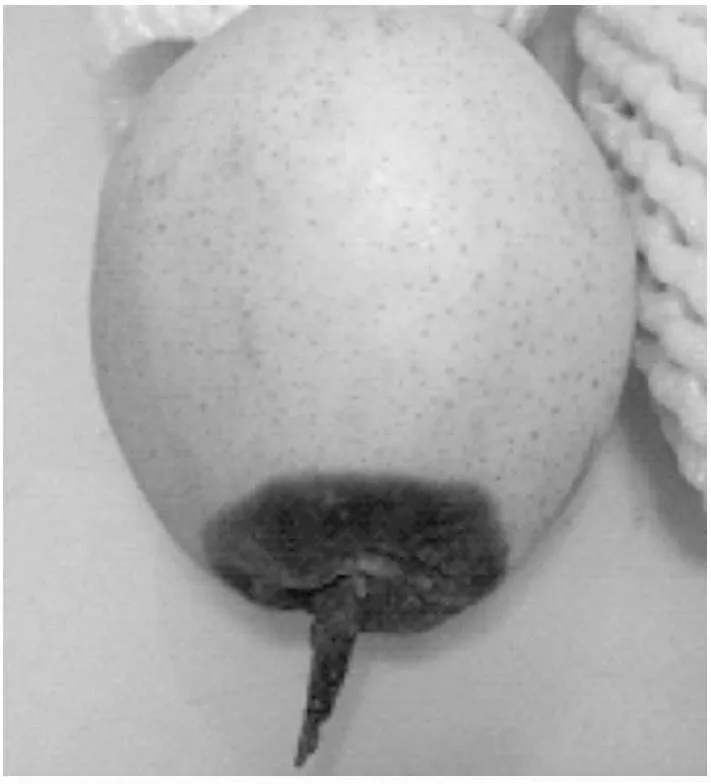
圖4 梨柄區域梨體腐壞實物圖

圖5 梨體其他部位腐壞實物圖
以上結果證明,拉拽方式采摘的香梨梨柄位置梨體的腐壞率最低,占總壞率的比例最小;扭轉方式采摘的香梨梨柄區域梨體的腐壞率占總腐壞率的比最大;折斷方式采摘的香梨造成梨柄區域梨體的腐壞率最高。
3 結論
(1) 通過建立力學模型分析拉拽、扭轉、彎折三種采摘方式中梨柄位置梨體的應力,得出拉拽方式中庫爾勒香梨梨柄區域梨體的應力值最小,彎折方式中的梨柄區域梨體的應力值最大。
(2) 儲存試驗結果表明:采用拉拽方式摘的香梨,梨柄區域梨體的腐壞率最小;采用彎折方式摘的香梨,梨柄區域梨體的腐壞率最高。試驗結果與基于靜力學思想建立的力學模型分析結果相符。
(3) 收獲香梨建議采用拉拽方式采摘。
[1] 高煥文.農業機械化生產學(上冊)[M].北京:中國農業出版社,2002: 151 .
[2] 李寶筏.農業機械學[M].北京:中國農業出版社,2003: 255-256 .
[3] 徐斌.便攜式水果分級采摘器的原理與應用[J].現代農業科技,2007(13):203-205.
[4] 陸文龍,陳龍偉.水果采摘器[P].中國專利:200610118823.x,2008-06-04.
[5] 蔣海華.一種高位水果采摘器[P].中國專利:02223572.8,2003-05-21.
[6] 劉西寧,朱海濤,巴合提.牧神 LG-1 型多功能果園作業機的研制[J].新疆農機化,2009(1):42-44.
[7] 李強,葉力勤,安巍.枸杞采摘機的試采條件[J].農機化研究,2009,31(6):126-128.
[8] 湯智輝,沈從舉,孟祥金,等.4YS-24型紅棗收獲機的研制[J].新疆農機化,2010(1):30-32.
[9] 段潔利,陸華忠,王慰祖,等.水果采收機械的現狀與發展[J].廣東農業科,2012(16):189-192.
[10] 王永廉.材料力學[M].北京:機械工業出版社,2012:69.
[11] 王永廉.材料力學[M].北京:機械工業出版社,2012:132.
Experimental Study on the Mechanical Model of Picking Korla Fragrant Pear
An Jing Wang Jindong Lan Haipeng Liu Wenliang Li Fengjuan*
(College of Mechanical and Electronic Engineering, Tarim University, Alar, XinJiang 843300)
To study the damages of the Korla fragrant pear for handling with different harvesting methods, in this study, the mechanical model of the effect of different picking methods on pear stem was established based on the static theory, and was verified according to the actual picking requirements. The results show that in the three picking ways of pulling, twisting and bending, the best picking way is pulling which causes the minimum degree of injury and it is in agreement with the analytical results of the mechanical model that established based on the static theory.
Korla fragrant pear; picking; damage mechanism; mechanical model
1009-0568(2016)04-0099-05
2015-12-18
塔里木大學校長基金碩士項目(TDZKSS201323,TDZKSS201410)。
安靜(1985- ),女,講師,碩士,研究方向為農業機械化裝備。 E-mail:407398754@qq.com
*為通訊作者 E-mail:276390658@qq.com
G237.5
A
10.3969/j.issn.1009-0568.2016.04.016
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49