迎浪工況下氣墊船運動響應研究*
2016-12-30 01:46:07劉曉媛
武漢理工大學學報(交通科學與工程版) 2016年6期
劉 寧 劉曉媛
(哈爾濱工程大學船舶工程學院 哈爾濱 150001)
迎浪工況下氣墊船運動響應研究*
劉 寧 劉曉媛
(哈爾濱工程大學船舶工程學院 哈爾濱 150001)
對全墊升氣墊船在迎浪工況下的運動響應進行了分析研究,介紹了氣墊船在波浪中的時域線性運動響應和時域非線性運動響應,并采取龍格-庫塔數值模擬方法,運用Fortran語言編程求解了在不同波浪頻率、迎浪工況下的氣墊船時域線性與非線性運動響應,分析對比了兩者結果得出響應結論.根據氣墊船的運動響應求得了靜水中和規則波下的波浪載荷.
氣墊船;迎浪工況;運動響應;波浪載荷
對氣墊船的研究起于20世紀上半葉,發展至今已經有近80年的歷史.從Reynolds等[1]推導出全墊升氣墊船的線性運動方程,到Doctors等[2-3]在雷諾茲等人研究的基礎上,將運動理論從頻域發展到時域,準確列出氣墊船在波浪中運動時的非線性運動微分方程,氣墊船的運動響應求解經歷了漫長的過程[4-6].文中使用Fortran程序求解了某全墊升氣墊船在波浪中的時域中的線性運動響應和非線性運動響應,并且根據氣墊船的運動響應求得了靜水中和規則波下的波浪載荷.
1 氣墊船在波浪中的運動響應
氣墊船在波浪中的運動響應求解是求解氣墊船結構設計載荷的前提工作,也是研究解決氣墊船結安全性的關鍵問題,同時也是氣墊船研究中的難點問題.通過合理的假設,列出假設下的運動響應方程組,最后求解該方程組就是解決問題的主要思路.文中求解了氣墊船的時域下的線性運動響應和非線性運動響應,并給出了相應的結論.
1.1 氣墊船的線性運動響應
1.1.1 基本假設
(1) 承認傅勞德-克雷洛夫假設,認為船的存在不影響波浪中壓力的分布和波浪的形狀;(2) 認為氣墊壓力(前、后)均勻分布;(3) 將氣墊面積(前、后)近似簡化為矩形;(4) 認為氣墊內空氣密度及壓力變化過程滿足熱力學絕熱壓縮定律;(5) 忽略圍裙觸水產生的水動力影響;(6) 忽略風扇動態響應影響.
1.1.2 平衡狀態計算
二氣室全墊升氣墊船在靜墊升狀態時的垂向力平衡方程和各個力對重心的力矩之和為0的平衡方程可寫為
式中:Ac1,Ac2為前后氣墊面積;pc1,pc2為前后氣室的氣墊壓力;xp1,xp2為前后氣室壓力中心縱向坐標;W為船體的重量;M0為船所受到的阻力和推力所引起的對船重心的力矩.
1.1.3 風扇風道特性方程
風扇風道特性方程可寫為
Hf=Af+BfQ-CfQ2
前后氣室的氣墊壓力分別為下式
式中:Hf為風扇總壓;Q為風扇流量;Af,Bf,Cf為風扇的有因次系數。
假設全船只有一個風扇,且風扇的出口直通圍裙囊,且圍裙囊直通全船,空氣氣流經過圍裙囊的囊孔后直接流入到氣墊.
令
式中:K為風道損失系數;ρa為空氣密度;AFK為風道特征面積;Cj為囊孔收縮系數;Aj為囊孔面積。
1.1.4 波浪方程
1.1.5 流量連續性方程
前、后氣墊的逸流量由2部分組成:(1)氣墊向大氣的逸流流量;(2)前、后氣墊之間的逸流流量.
1.1.6 結果求解
聯立以上方程組,使用龍格庫塔數值模擬方法求解出氣墊船時域中的線性運動響應,見圖1~4.圖1、圖3中縱坐標為升沉運動幅值的無因次量;圖2、圖4中縱坐標為縱搖角度的無因次量,橫坐標均為運動周期.
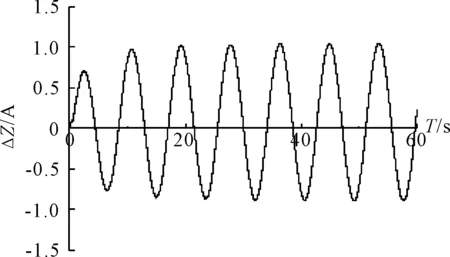
圖1 w=0.4時的升沉運動變化規律
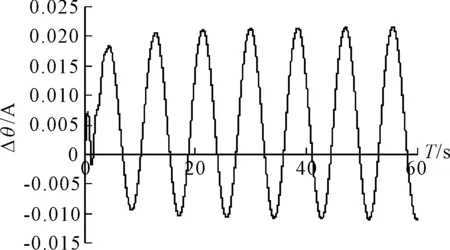
圖2 w=0.4時的縱搖運動變化規律
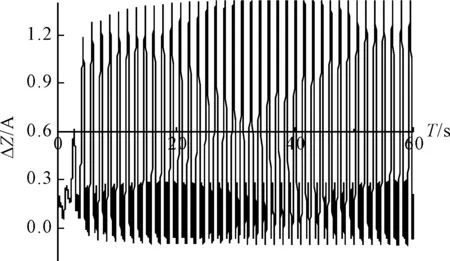
圖3 w=2.0時的升沉運動變化規律
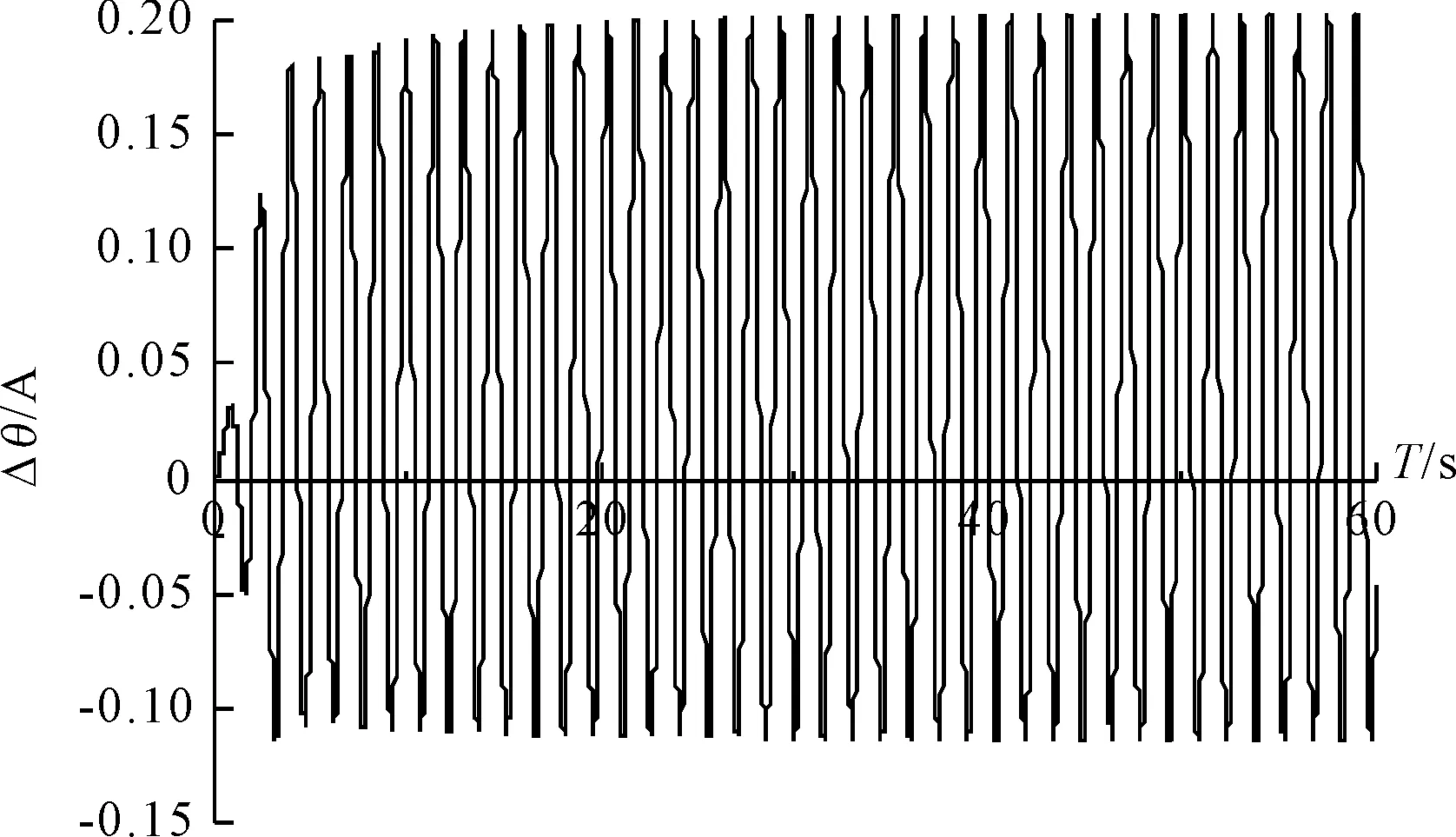
圖4 w=2.0時的縱搖運動變化規律
由圖1~4可知:
1) 氣墊船的升沉和縱搖運動響應頻率均隨著波浪頻率的加快而加快,但是運動響應的幅度卻不是單調變化的,而是有增有減.
2) 當波浪頻率較低時,氣墊船從接收波浪擾動直到運動響應的穩定需要較長的時間,w=0.4時,氣墊船的運動響應達到穩定的過程經過了20 s,w=1.2時,經過10 s基本到達穩定狀態.
3) 隨著波浪頻率的增加,氣墊船的運動響應逐漸發生周期性震蕩.
4) 從圖像中可以看出氣墊船的升沉運動響應是縱搖運動的數倍,在高頻波浪下,升沉響應的幅度甚至達到了縱搖響應幅度的近20倍,由此可以推測這是由于在高頻波浪下,氣墊船氣室下的波浪分布得細密,因此縱搖響應幅度不大.
5) 氣墊船在某一頻率下的升沉運動響應和縱搖運動響應之間存在著約90°的相位差.
1.2 氣墊船的非線性運動響應
時域非線性運動響應是在線性運動的基礎上求解的,線性假設中認為氣墊船圍裙不觸水,但實際情況是圍裙觸水時氣墊船受到力作用,文中使用平板砰擊力代替,砰擊壓力公式為
求解結果見圖5~8.
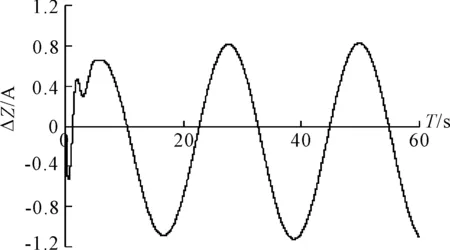
圖5 w=0.2時的升沉運動變化規律
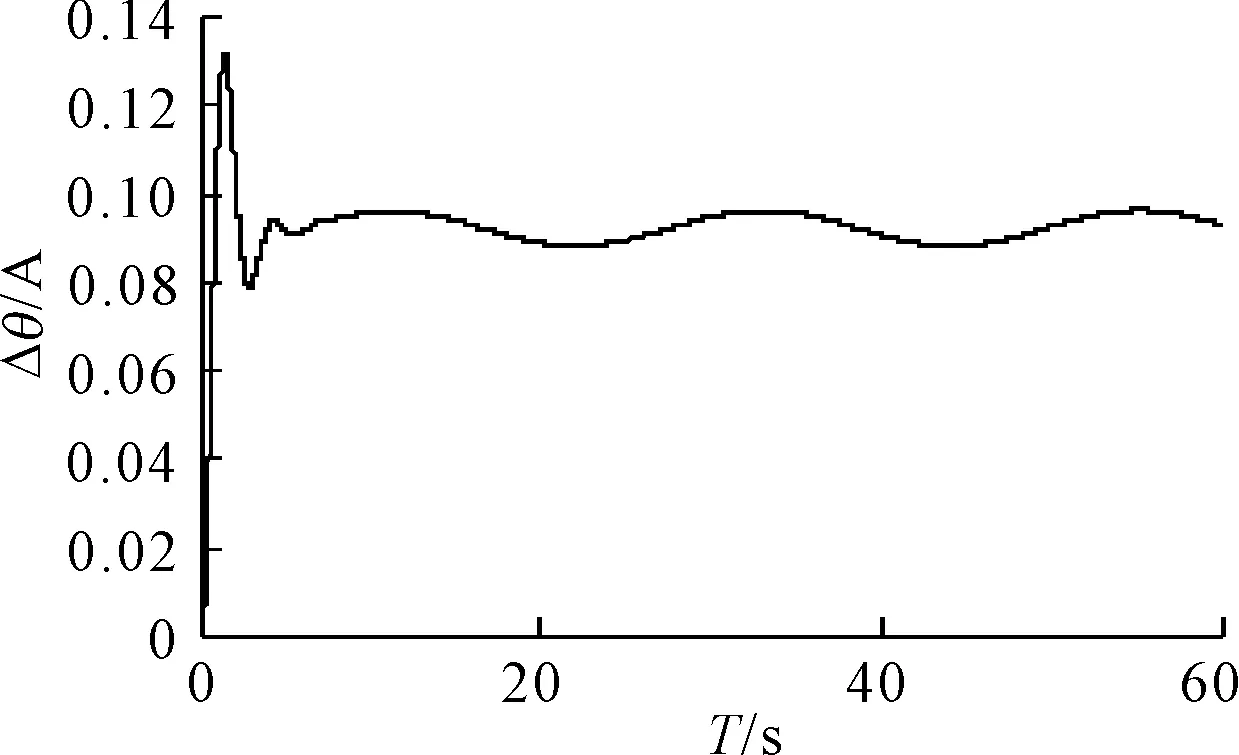
圖6 w=0.2時的縱搖運動變化規律
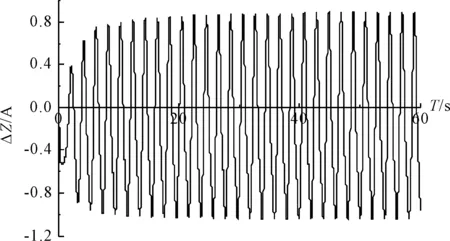
圖7 w=1.0時的升沉運動變化規律
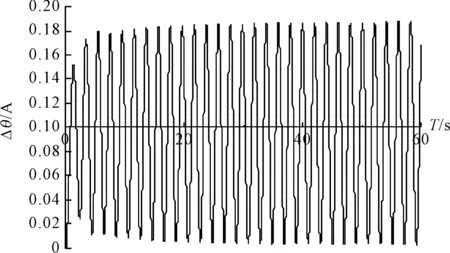
圖8 w=1.0時的縱搖運動變化規律
由圖5~8可知:
1) 氣墊船運動響應頻率隨著波浪頻率的增加而增加.
2) 隨著波浪頻率的增加,氣墊船運動響應達到穩定狀態所需要的時間也越來越短,如圖可見w=0.2時經歷約20 s到達穩定狀態,w=1.0時經歷約12 s到達穩定狀態.
3) 隨著時間增加,某一波浪頻率下的氣墊船運動響應逐漸達到平衡狀態.
4) 氣墊船的升沉運動和縱搖之間存在90°的相位差.
1.3 運動響應比較
對1.2和1.3所求得的氣墊船在波浪中的線性和非線性時域運動響應結果經行比較和分析,見圖9~12.
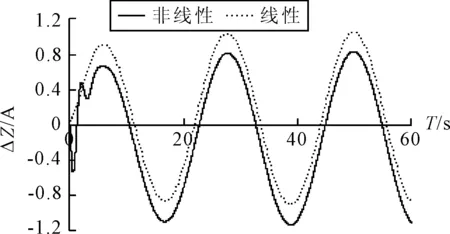
圖9 w=0.2時的升沉運動變化規律對比
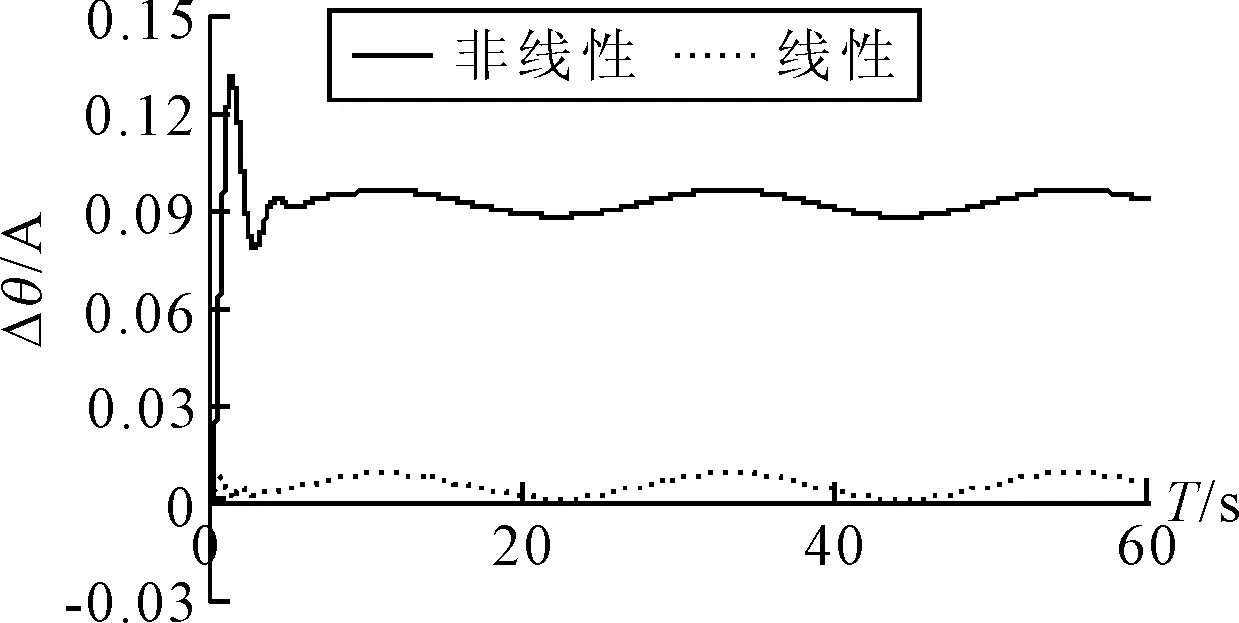
圖10 w=0.2時的縱搖運動變化規律對比

圖11 w=0.6時的升沉運動變化規律對比
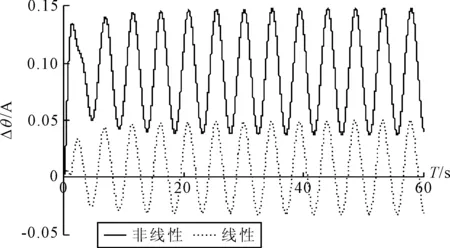
圖12 w=0.6時的縱搖運動變化規律對比
根據以上幾個具有代表性的運動響應,主要從線性與非線性的差別來講,可以分析得出如下結論.
1)w=0.2時,線性與非線性升沉運動的幅值差別不大,但平衡位置存在一個較小差異,說明不加砰擊項時,氣墊船以靜水面為平衡位置往復運動,而加入砰擊時,由于受到向上的力的作用,故平衡位置在垂直向上的方向上有所移動.
2)w=0.2時,加入砰擊以后的總要運動幅度變化不大,但是平衡位置也是有所抬升的,由于以抬艏為正,那么投影入實際船體的等價形式就是氣墊船的抬艏高度有所增加,船呈現一個尾傾的姿態,但由于數值較小,因此不會對氣墊船產生災難性的影響.
3)w=0.6時,可知氣墊船運動的頻率較w=0.2時有明顯的增加,線性運動響應的變化規律與w=0.2時基本類似,但可看出非線性運動的幅度較線性運動有一些減小,這是由于圍裙與水面發生砰擊時,使得船的運動受到阻礙,從而不能像線性運動一樣達到無阻礙時的位置,因此幅值有所減小,而這種幅值減小的情況是隨著波頻增大而逐漸顯著起來的.
4)w=0.6時,氣墊船縱搖的運動響應情況與W=0.2時類似,達到穩定后作規律的往復振動,隨著頻率的增加,氣墊船的縱傾現象更加嚴重了,但是數值依然是很小的.
5) 總體上來講,加入砰擊項后,氣墊船的運動響應在加波浪的前期變得比線性運動更加地復雜而紊亂,需要一段時間才能達到穩定狀態,穩定后能呈現規律性較強的往復振動,總體上尾傾現象變得更加嚴重,但數值很小,因此影響不大,升沉運動的變化隨著頻率的變化不是線性的.
2 氣墊船波浪載荷預報
2.1 氣墊船在靜水中的載荷響應
2.1.1 質量分布
由于目標船僅作理論研究用,因此并沒有質量分布數據,因此根據氣墊船船型肥胖的特點使用梯形的質量分布進行代替,原理來自于《船舶結構強度》.
2.1.2 氣墊船墊壓分布
由于假設氣室(前、后)壓力與位置無關,因此,氣墊壓力分布函數可表示為
2.1.3 氣墊船的靜水剪力、彎矩
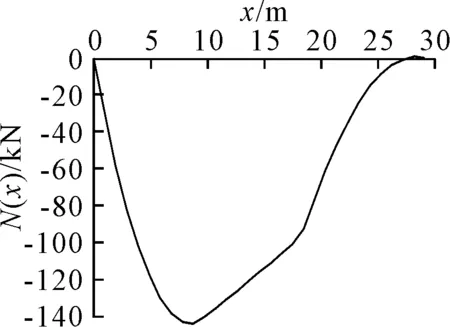
圖13 靜水剪力
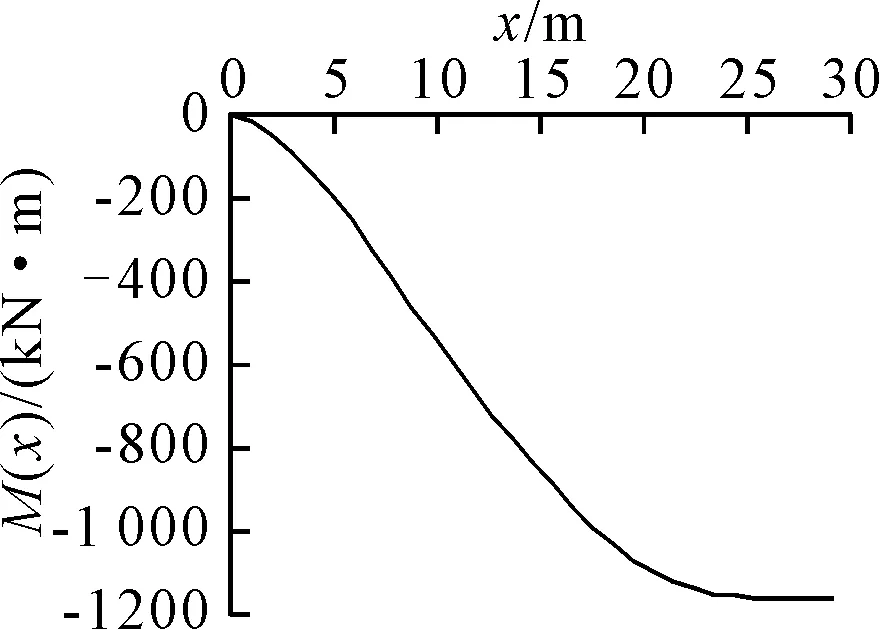
圖14 靜水彎矩
由圖13~14可知:
1) 氣墊船的最大剪力發生在第8站的位置,最大剪力約為140 kN,這與常規排水型船舶的最大剪力通常發生在距離首尾1/4處的情況有所不同,產生這種現象的原因在于氣墊船與常規排水型船舶的受理方式不同,常規船舶以水壓力作為主要浮力,而氣墊船以空氣抬升,常規船受到來自水的浮力沿船長是連續變化的,而氣墊船前后兩個氣室的壓力不同,因此浮力有間斷突變處,由于這些原因,會導致最大剪力發生的位置發生一定的偏移.
2) 氣墊船的最大彎矩發生在30站左右,最大值約為1 200 kN·m與普通排水型船舶最大彎矩發生在船中處有一定的差別,其中主要原因還是由于兩者受力上的區別,對此不再贅述,而最后彎矩的曲線沒有回到零點,一方面是由于氣墊船在靜水中受到來自阻力和推力引起的力矩,另一方面是由于質量分布模擬與實際質量分布存在一些差異的問題.
2.2 氣墊船在規則波中的載荷響應
以第8站為例,計算了第8站剖面處的剪力和彎矩的幅值的無因次量,分別以波長無因次量和波頻無因次量為自變量的變化規律,見圖15~18.縱坐標為剪力與彎矩幅值的無因次量,橫坐標為無因次數值與無因次頻率.
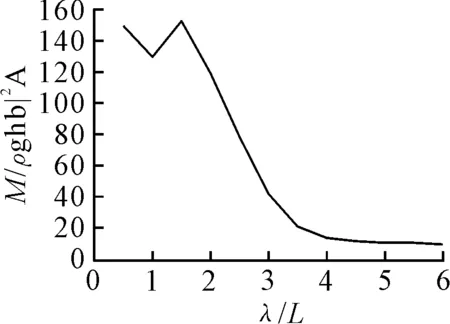
圖15 彎矩隨無因次波長變化規律
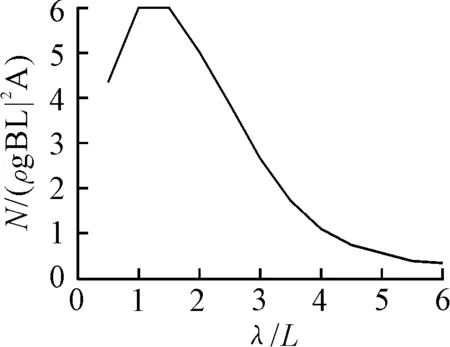
圖16 剪力隨無因次波長變化規律
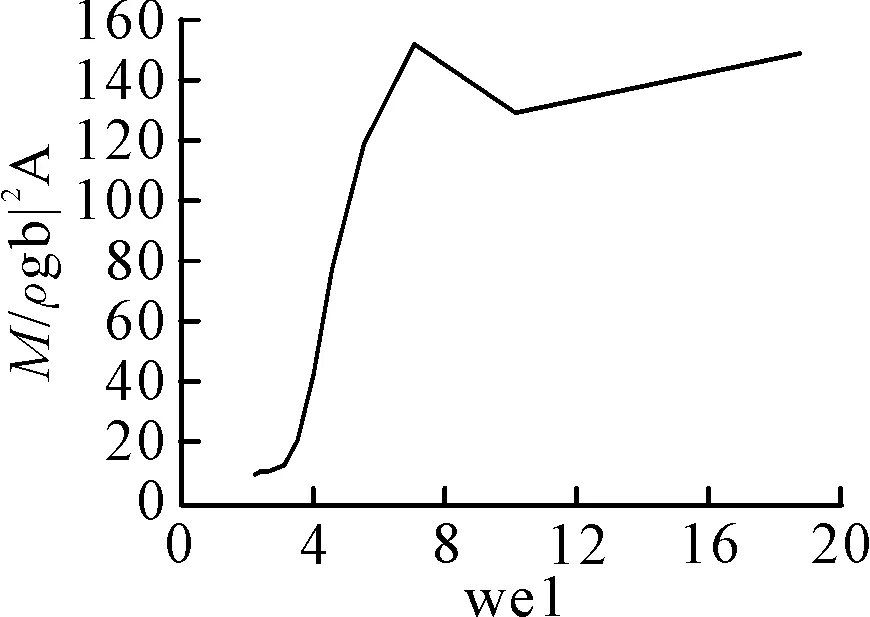
圖17 彎矩隨無因次遭遇頻率變化規律
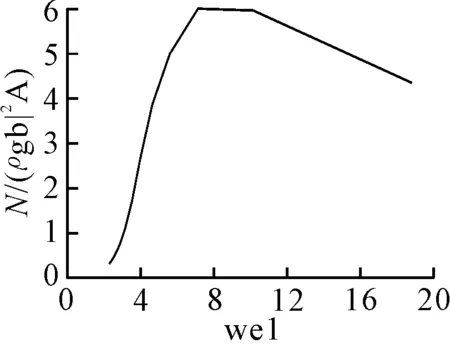
圖18 剪力隨無因次遭遇頻率變化規律
由圖15~18可知:
1) 彎矩的極大值出現在波長船長比在1~2附近,大小為150,說明當波浪長度在此范圍時,第8站剖面彎矩達到最危險的狀態,同時可以看出在此處附近剪力也同時達到最大值6.0,因此可以得出結論對于此剖面來說,波長船長比為1~2時的情況下是需要校核強度的.
2) 第8站處彎矩隨無因次遭遇頻率的變化規律不是單調的,分別在無因次遭遇頻率為8和20時都達到最大值150,并且剪力在頻率為8附近達到最大值6,因此無因次頻率為8和20時都需要進行校核.
3 結 束 語
氣墊船的線性運動響應和非線性運動響應的區別在于,非線性運動響應是在線性方程的基礎之上加入了砰擊效應的影響,即考慮圍裙觸水的情況,并用平板砰擊理論計算圍裙觸水時所受到的外力,更加真實地模擬出現實情況,并使用Fortran編程,這一過程的核心難點在于如何確定砰擊加載的條件,解決方法是判定砰擊發生前后時刻氣墊船圍裙與波浪之間的相對位移大小,文中認為只在前一時刻相對位移大于零,而后一時刻相對位移不大于零的情況下才發生一次砰擊,其余情況下無砰擊.
通過已經求得的氣墊船時域運動響應對氣墊船波浪載荷預報,使用梯形質量分布來模擬氣墊船的質量分布情況,使用梯形法求解定積分算出氣墊船在靜水中的各剖面剪力彎矩圖,在波浪載荷預報中,根據達朗貝爾原理對氣墊船進行受力分析,計算氣墊船在波浪中所受剪力彎矩情況.
下一步的研究工作:(1)文中在求解氣墊船在波浪中的運動響應時假設前后氣室的墊壓均為某一數值,在該氣室中不隨位置發生變化,這與實際情況是有出入的,因此有必要運用流體力學相關知識對氣墊中的流場進行更加符合真實情況的數值模擬;(2)文中假設氣墊船圍裙為剛體,受力時并不發生形變而產生內力,這與實際情況也是不符的,因此對于氣墊船圍裙的柔性及其形變受力等情況應該有更加深入的研究;(3)文中假設忽略水動力對氣墊船產生影響,但實際情況是圍裙或者船體入水時是會受到水動力的,水會對氣墊船在水中的運動產生一定程度的阻力,這一方面也是未來工作的一項研究內容.
[1]REYNOLDS A J, WEST R P, BROOKS B E. Heaving and pitching response of a hovercraft moving over regular waves[J]. Journal of Mechanical Engineering Science,1972,14(5):89-95.
[2]DOCTORS L J.Nonlinear motion of air cushion vehicle over waves[J]. Journal of Hydronautics,1975(1):55-58.
[3]KAPLAN P, SCHNEIDER J, GOODMAN T R. Motions of air cushion vehicles in waves[J].Symposium on the Dynamics of Marine Vehicles and Structures in Waves,1974(2):75-80.
[4]周佳,唐文勇,張圣坤.全墊升ACV全圓周浪向下耐波性分析[J]. 中國造船,2009,50(2):100-108.
[5]周佳,唐文勇,張圣坤. ACV三維耐波性分析[J]. 船舶力學,2009,13(4):256-261.
[6]周佳,唐文勇,張圣坤.全墊升ACV耐波性參數敏感度分析[J].上海交通大學學報,2009,43(10):555-560.
Research on the Motion Response of Air Cushion Vessel in the Condition of Head Sea
LIU Ning LIU Xiaoyuan
(CollegeofShipbuildingEngineering,HarbinEngineeringUniversity,Harbin, 150001,China)
The motion responses of the hovercraft in the condition of head sea are analyzed in this paper. The time-domain linear motion response and time domain nonlinear motion response of the hovercraft are introduced, respectively. Based on the Runge-Kutta numerical integration method, FORTRAN language is used to solve the time-domain linear and nonlinear motion response under different wave frequency and head sea. The results of the two methods are analyzed and compared, and the wave loads are obtained according to the motion response of the air cushion ship.
air cushion vessel; head sea; motion response; wave load
2016-10-31
*國家留學基金青年骨干項目(201606685032)
U674.34
10.3963/j.issn.2095-3844.2016.06.008
劉寧(1981—):男,博士,主要研究領域為環境載荷和結構強度