基于牽連補償算法的噴管擺動控制系統設計①
2017-01-05 09:34:30李信元夏云峰趙建輝
固體火箭技術 2016年6期
趙 亮,李信元,郝 俸,張 科,夏云峰,趙建輝
(1.中國航天科技集團公司四院四十一所,西安 710025;2.西北工業大學,西安 710072;3.中國航天科技集團公司四院401所,西安 710025;4.空軍西安飛行學院,西安 710306)
基于牽連補償算法的噴管擺動控制系統設計①
趙 亮1,2,李信元1,郝 俸3,張 科2,夏云峰1,趙建輝4
(1.中國航天科技集團公司四院四十一所,西安 710025;2.西北工業大學,西安 710072;3.中國航天科技集團公司四院401所,西安 710025;4.空軍西安飛行學院,西安 710306)
為了消除驅動噴管擺動的2個作動器間的牽連效應,確保控制指令精確,利用旋轉矩陣原理,計算噴管擺動時2路作動器的伸長量,進一步設計出用于前擺心深潛入式噴管的擺動控制系統。試驗結果顯示,4°單擺時牽連擺角占最大擺角比值較大(7.15%),補償計算后最大牽連擺角僅為0.002°,從而驗證了該方法能通過消除牽連效應提高全軸擺動噴管的控制精度。
牽連補償;擺動噴管;控制系統
0 引言
推力向量控制技術是通過改變火箭發動機或其他動力裝置產生的燃氣流方向來控制導彈的飛行方向和姿態角[1]。固體火箭飛行姿態是由伺服控制系統控制噴管的擺動而改變火箭推力方向達到的[2-3]。對于大機動、高速戰術導彈常采用的前擺心深潛入結構形式的全軸擺動噴管,研究噴管擺動的控制對推力向量控制的精度尤為重要。
全軸擺動噴管實現擺動的驅動裝置是2路互成90°夾角作動器的伺服機構,通常當一個方向伺服作動器運動時,另一個方向作動器由于存在機械限制,使噴管除了主要向擺動作動器活塞桿方向運動之外,也將在另一個作動器方向產生移動,這就是牽連效應[4-5]。伺服機構的控制方案分為理想狀態和非理想狀態,理想狀態是2路作動器不發生牽連,每路作動器伸縮時正負擺角對稱,否則為非理想狀態,對于戰略導彈常采用的后擺心結構形式的噴管,作動器的牽連作用影響作用比較小,一般情況下可忽略[6]。而對于某戰術型號上采用的前擺心深潛入式的噴管,由于噴管尺寸、結構等方面的限制,在推力向量控制過程中不能忽略2個方向的上相互牽連,為提高控制精度,需要考慮牽連效應對噴管擺動的影響,把非設計狀態控制在一定范圍內,文獻[7]利用ADAMS軟件建立軸對稱推力矢量控制伺服機構的虛擬樣機來分析牽連干擾和正負擺角不對稱,優化了伺服機構的布局;工程上也常利用擺角反饋信號對指令控制信號進行補償修正,但由于伺服機構及擺角傳感器的響應速度等限制,控制很難達到實時補償。
本文首先利用牽連補償算法,對俯仰和偏航2個方向上的作動器的控制指令進行了補償計算,并基于此算法設計出適用于前擺心深潛入式噴管擺動試驗的控制系統,試驗結果顯示,利用此算法建立的控制系統能夠改善推力向量控制精度。
1 系統組成及原理
1.1 硬件組成
圖1為系統的構成原理框圖,測控軟件中內嵌牽連補償算法,對指令信號和采集信號進行牽連補償計算;模擬信號輸出模塊和信號調理模塊按指令信號控制作動器動作;作動器接受指令信號控制作動器伸長,驅動噴管擺動,利用傳感器將信號傳遞至信號調理模塊;模擬信號采集模塊將傳感器的伸長量反饋至測控計算機,通過系統牽連補償算法逆運算,將伸長量轉化為噴管擺動角度數據。
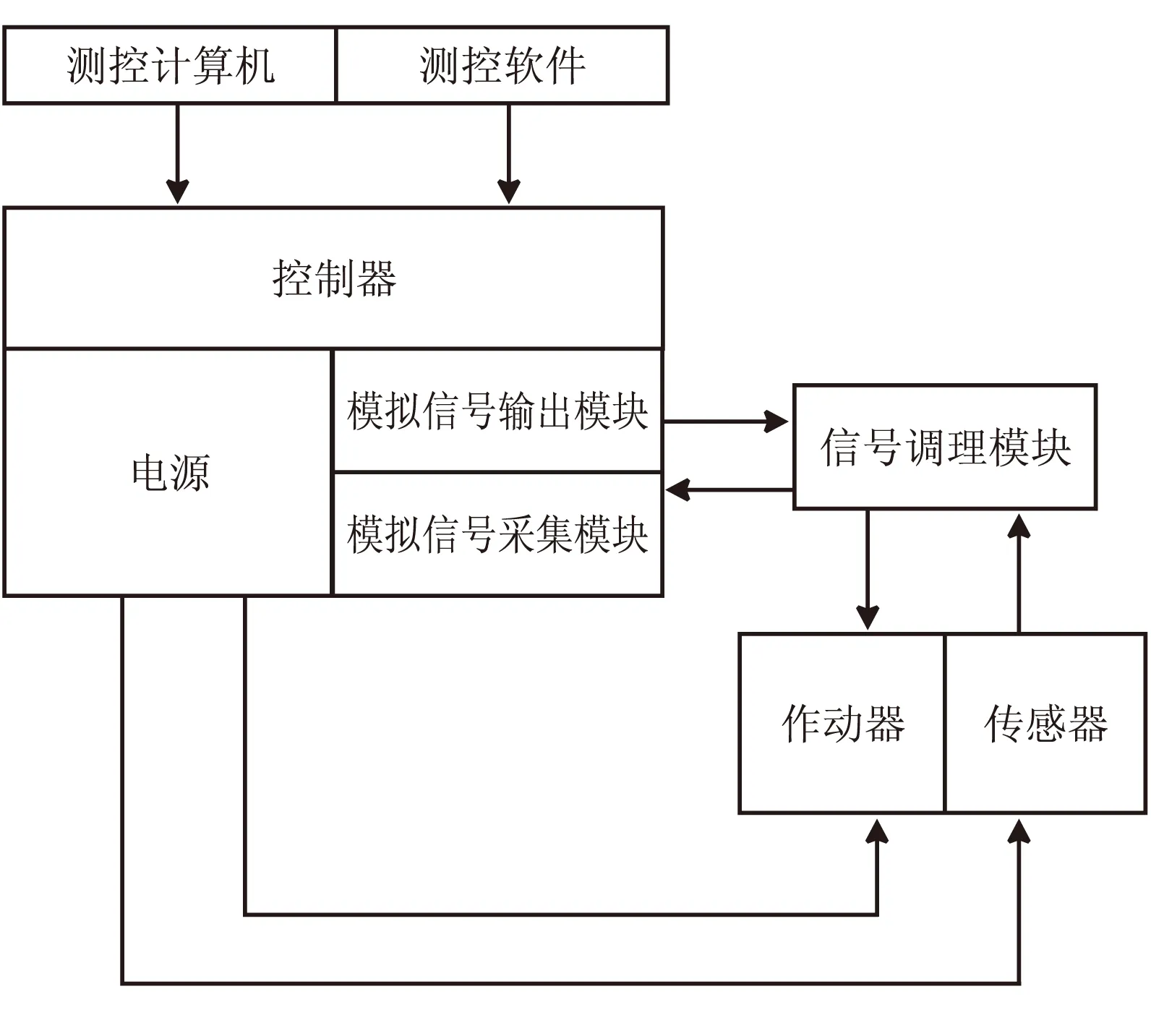
圖1 牽連擺動控制系統硬件原理圖Fig.1 Hardware schematic diagram for coupled swing control system
1.2 算法原理
1.2.1 噴管空間坐標系定義
圖2為噴管伺服作動器安裝示意圖。在此坐標系中,以噴管設計擺心O為原點建立靜坐標系,Oz為噴管的設計軸線,Ox、Oy為安裝作動器的方位軸,A1B1、A2B2分別安裝2路作動器,其對面S1、S2處各安裝1個線位移傳感器,測量噴管擺動時兩方向的位移量。A1、A2分別為2路作動器1、2的下支耳安裝孔中心(噴管出口方向為下方),B1、B2為作動器1、2的上支耳安裝孔中心,A、B點的坐標可分別表示為
加擺動指令后,為了得到A1B1、A2B22路作動器伸長量,首先需要利用旋轉矩陣[8]進行坐標變換。坐標變換僅僅改變矢量方向,而不改變矢量的大小,通過矩陣的坐標變換,可得到俯仰和偏航方向作動器的伸長量,作動器的長度變化,在測量中反映在對面線位移傳感器的S1、S2長度變化上。
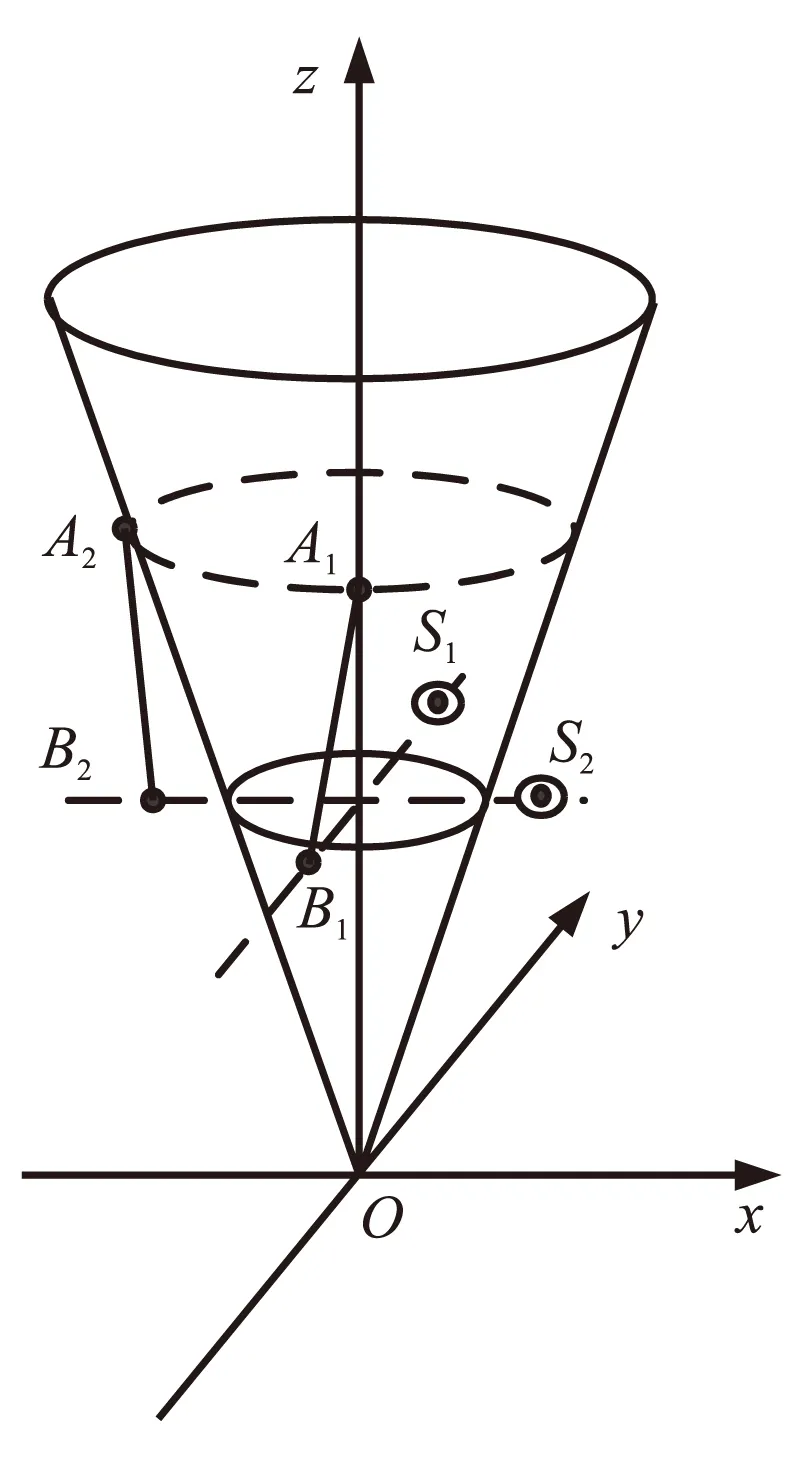
圖2 擺動噴管的空間坐標系Fig.2 Space coordinate system for movable nozzle
傳感器S1、S2的初始長度分別為
(1)
(2)
關于右手笛卡爾坐標系的x-、y-軸的旋轉分別叫做俯仰、偏航旋轉,這些旋轉被表達為圍繞一個軸的旋轉,定義噴管俯仰和偏航方向上的姿態輸出角分別為q1、q2。Ax、Ay為作動器A1B1、A2B2的擺角,作為輸入指令由軟件口輸入,按控制系統定義,Ax、Ay和q1、q2的轉換關系為
(3)
(4)
1.2.2 空間坐標系變換
繞x-軸的主動旋轉定義為
繞y-軸的主動旋轉為
令
R=RyRx
(5)
進行坐標變換
(6)
坐標A經過坐標變換之后的坐標為G,求得G與B之間的長度即可求得線位移傳感器此時長度。
1.2.3 計算伸長量
此時線位移傳感器S1的長度可以表示為
(7)
同理,線位移傳感器S2的長度可以表示為
(8)
發出擺角指令Ax、Ay后,傳感器的長度發生變化。首先通過轉換關系可得到俯仰、偏航角度,進而通過M、N、L10、L20的表達式得線位移傳感器S1的位移量:
傳感器S2的位移量:
1.2.4 牽連補償逆運算
為了將傳感器的位移信號轉化為噴管擺角數據,需要利用牽連補償算法的逆運算和迭代算法,算法如下:令Δq為迭代角增量,Δq=10-6,q10、q20為2個方向角度的初始值,將q1=q10+Δq,q2=q20帶入式(3)~式(8),計算得到M1、N1;將q1=q10,q2=q20+Δq,分別計算得到M2、N2。
分別求2個方向的位移量的偏導:
噴管位于零位狀態時L10=L20=l0。
令ΔQ1、ΔQ2為每次進行迭代時2個方向的角度變化量,則有以下方程:
可解得
同時將迭代次數置為n=n+1,此時,q1=q10+ΔQ1,q2=q20+ΔQ2。
其中
當作動器滿足條件: max{[M-(l0+Δla)],[N-(l0+Δlb)]}<ε(ε是迭代精度,取為10-6)或者n≥30時,跳出循環,如不滿足上述2個條件則置:
重新進行迭代求解過程。算法流程圖如圖3所示。
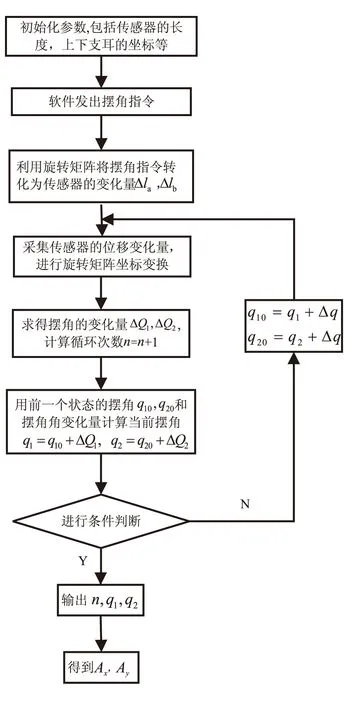
圖3 牽連補償算法流程圖Fig.3 Flow chart for coupled compensation algorithm
2 試驗研究
擺動控制指令的參數為:頻率f=0.2 Hz進行5.66°異向合成擺動和4°單向擺動各1周。坐標值A、B的值分別為
通過算法計算可得到的線位移傳感器S1、S2變化規律如圖4所示。為了對比,圖5給出了不計牽連作用的傳感器伸長量的變化曲線。
加入不同的控制指令后,由線位移傳感器S1、S2測得的數據經過處理可得到噴管擺角曲線,如圖6所示,其中實線為含牽連補償作用的擺角變化曲線,虛線為不計牽連作用的擺角變化曲線。不計牽連作用時,最大單擺角度3.871°,異相合成5.48°;加入牽連補償算法后,實際最大單擺角度3.938°,異相合成5.59°。
表1列出了2種情況下分別繞x和y軸單擺的最大擺角和最大合成角度對比。
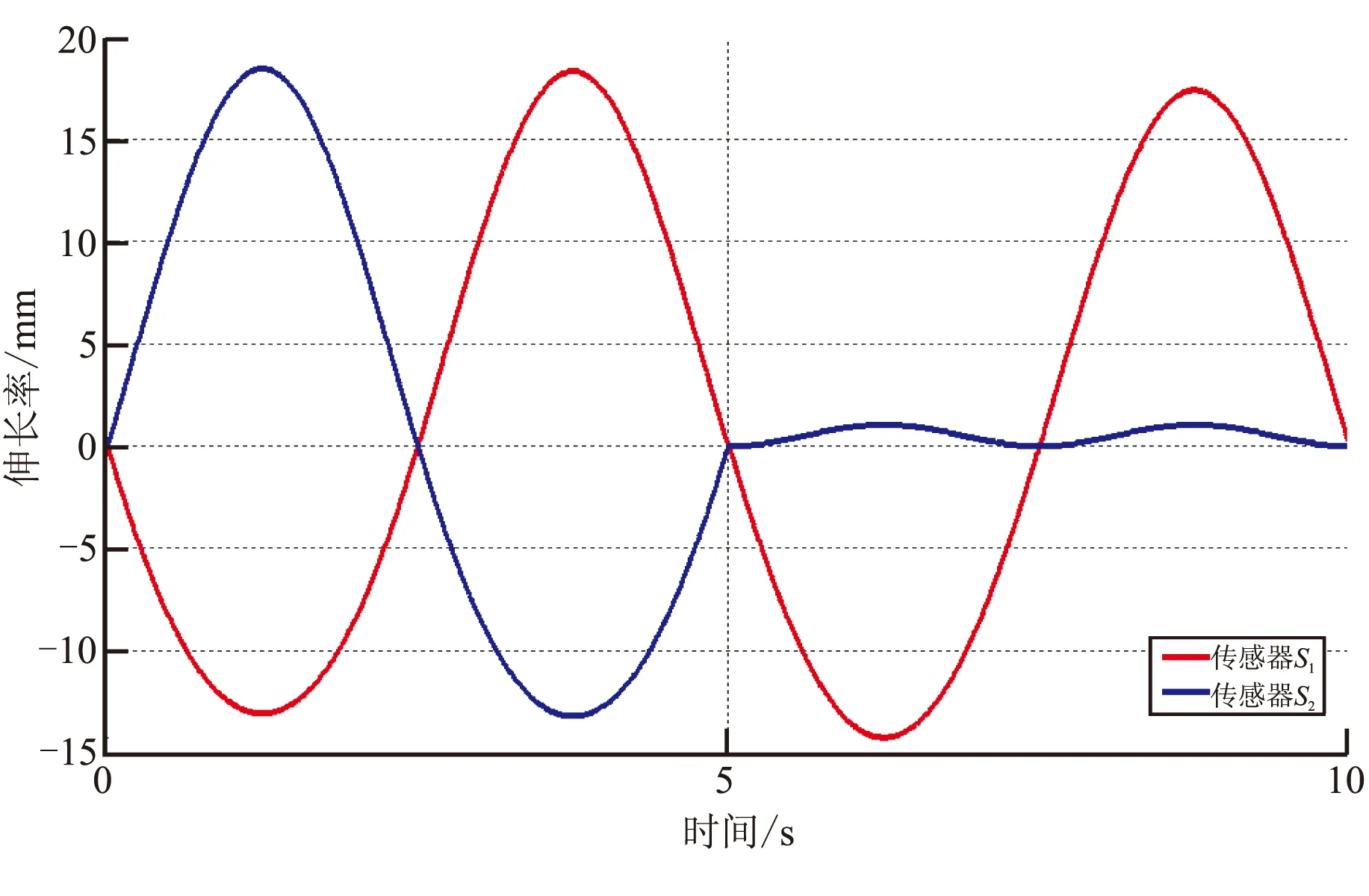
圖4 傳感器伸長量變化曲線Fig.4 Elongation change curve of sensors
圖5 不計牽連時傳感器伸長量變化曲線Fig.5 Elongation change curve of sensors when coupling is neglected
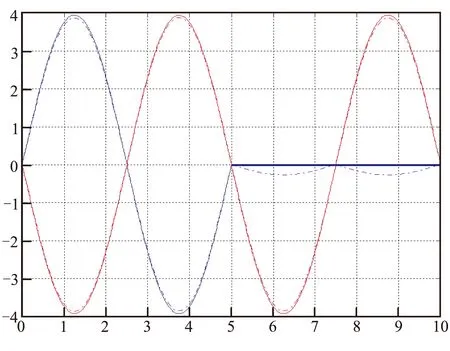
圖6 擺角曲線對比Fig.6 Comparison of swing angle change curve
從圖4和圖5的單擺控制指令對比可看出,一路作動器伸長驅動噴管擺動時,互成90°方向的作動器的牽連補償作用。由圖6和表1可見,在指令為4°單擺、不計牽連時,Sx方向上噴管最大擺角為3.871,Sy方向的牽連最大擺角為0.277°,占最大擺角的7.15%;由表1可計算出異向合成的誤差減小了1.94%,單向擺動的誤差減小了1.5%。
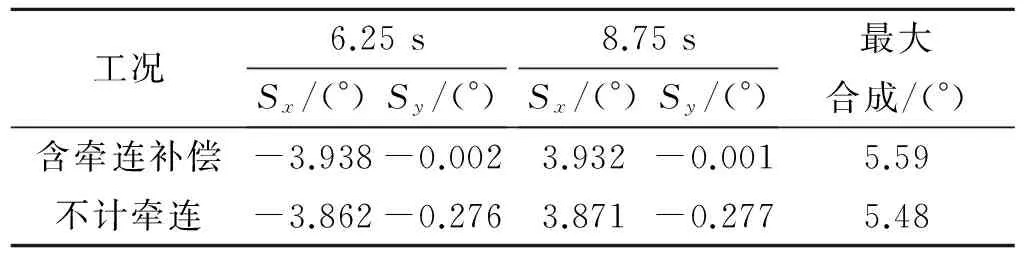
表1 最大單擺和最大合成角度對比Table 1 Comparison of the maximum angle of one-way swing and compound swing
3 結論
(1)前擺心深潛入式噴管的2路作動器之間牽連效應較明顯,文中試驗所得牽連擺角占最大擺角比值較大(7.15%)。因此,有必要對牽連回路的作動器進行補償。
(2)利用旋轉矩陣算法建立的推力向量控制模型可精確計算出前擺心深潛入式噴管2路作動器的伸長量。采用含牽連補償算法的方法所得單擺最大擺角和異向合成擺角與真實指令之間的誤差比不計牽連時的誤差小;而且由表格可看出,利用本文所提出的方法得到的最大牽連擺角僅為0.002°,從而驗證了此方法通過消除牽連作用提高推力向量控制的精度。
[1] 朱學平,祁鵬,張曉峰,等.擺動噴管控制導彈魯棒飛行控制系統設計 [J].固體火箭技術,2013,36(4):427-436.
[2] 陳剛,白效慧,陳晨.珠承噴管壓痕影響因素及控制的實驗研究[J].固體火箭技術,2012,35(5):619-622.
[3] 毛羽國.柔性噴管動態光電實時測量設備的技術實施[J].光電工程,1999,26(2):9-13.
[4] 鄭勇斌.擺動噴管控制精度相關問題討論[J].現代防御技術,2007,35(3):54-57.
[5] Wassom S R,Faupel L C,Perley T.Integrated aerofin/thrust vector control for tactical missiles[J].Journal of Propulsion and Power,1991,7(3):374-381.
[6] 仲瑞昌.噴管全軸擺動時牽連運動和擺角不對稱分析計算[J].固體火箭技術,1996,19(3):1-5.
[7] 李志臣,朱文海.基于虛擬樣機技術的軸對稱推力矢量控制伺服機構設計[J].現代防御技術,2005,33(6):37-42.
[8] Arfken G.Mathematical methods for physicists,3rd ed.[M].Orlando,FL:Academic Press,1985.
(編輯:呂耀輝)
Design of control system for movable nozzle based on coupled compensation algorithm
ZHAO Liang1,2,LI Xin-yuan1,HAO Feng3,ZHANG Ke2,XIA Yun-feng1,ZHAO Jian-hui4
(1.The 41st Institute of 4th Academy of Aerospace Science and Technology Corporation,Xi’an 710025,China;2.Northwestern Polytechnical University,Xi’an 710072,China;3.The 401st Institute of 4th Academy of Aerospace Science and Technology Corporation,Xi’an 710025,China;4.PLA Air Force Xi’an Flight Academy,Xi’an 710306,China)
In order to eliminate the coupling effects between two actuators driving the nozzle swings, as well as to ensure the precision of control command,the elongation of the two actuators was calculated when the nozzle swung based on the principle of rotation matrix.Further the swing control system for deeply submerged nozzle with front pivot point was designed.The experiment results show when angle of one-way swing reaches 4 degrees, the large ratio(7.15%)between the coupled angle and maximum swing angle exists,the maximum coupled angle is 0.002 degrees only using compensation calculation,and the control precision of the omni-axial movable nozzle through eliminating the coupling effects can be improved greatly by the method proposed in this paper.
coupled compensation;movable nozzle;control system
2016-01-21;
2016-03-07。
趙亮(1987—),男,博士生,研究方向為導航、制導與控制。E-mail:zhaoliangbuct@126.com
V435
A
1006-2793(2016)06-0755-04
10.7673/j.issn.1006-2793.2016.06.004
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
