BDS單參考站載波相位差分定位方法
2017-01-05 01:38:58楊秋實(shí)徐愛(ài)功祝會(huì)忠
導(dǎo)航定位學(xué)報(bào) 2016年4期
關(guān)鍵詞:方向
楊秋實(shí),徐愛(ài)功,祝會(huì)忠,高 猛
(遼寧工程技術(shù)大學(xué) 測(cè)繪與地理科學(xué)學(xué)院,遼寧 阜新 123000 )
?
BDS單參考站載波相位差分定位方法
楊秋實(shí),徐愛(ài)功,祝會(huì)忠,高 猛
(遼寧工程技術(shù)大學(xué) 測(cè)繪與地理科學(xué)學(xué)院,遼寧 阜新 123000 )
為了進(jìn)一步提高BDS單參考站的載波相位差分定位精度,利用單參考站提供觀測(cè)值的非差誤差改正數(shù)對(duì)用戶觀測(cè)值進(jìn)行改正,然后利用北斗系統(tǒng)B1、B2雙頻觀測(cè)數(shù)據(jù)實(shí)現(xiàn)單參考站載波相位差分定位:首先利用B1、B2載波相位觀測(cè)值組成單差載波相位寬巷觀測(cè)值,采用搜索算法固定單差寬巷整周模糊度;之后建立寬巷及B1的單差觀測(cè)方程;再利用搜索算法固定載波相位的整周模糊度。實(shí)驗(yàn)結(jié)果證明利用單參考站非差誤差改正數(shù)的BDS載波相位差分定位能夠完成單差模糊度解算,精度可達(dá)到cm級(jí),而且實(shí)現(xiàn)效率高、用戶端定位算法簡(jiǎn)單。
北斗衛(wèi)星導(dǎo)航系統(tǒng);單參考站;寬巷組合;整周模糊度
0 引言
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou satellite navigation system,BDS)是中國(guó)自主研制開(kāi)發(fā)的、具有自主知識(shí)產(chǎn)權(quán)的衛(wèi)星導(dǎo)航定位系統(tǒng)[1],是繼美國(guó)的全球定位系統(tǒng)(global positioning system,GPS)、俄羅斯的格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GLONASS)之后國(guó)際上第3個(gè)提供服務(wù)的衛(wèi)星導(dǎo)航系統(tǒng)。BDS由地球靜止軌道(geosynchronous Earth orbit,GEO)衛(wèi)星、傾斜地球同步軌道(inclined geosynchronous satellite orbit,IGSO)衛(wèi)星和中高度地球軌道(medium Earth orbit,MEO)衛(wèi)星構(gòu)成。目前BDS已開(kāi)始向亞太大部分地區(qū)正式提供連續(xù)無(wú)源定位、導(dǎo)航、授時(shí)等服務(wù)。BDS提供的標(biāo)準(zhǔn)服務(wù)定位精度為10 m,測(cè)速精度為0.2 m/s,授時(shí)精度為20 ns[2]。載波相位差分定位是提高BDS標(biāo)準(zhǔn)定精度位的主要手段之一。
本文利用單參考站提供載波相位觀測(cè)值的非差誤差改正數(shù)對(duì)用戶觀測(cè)值進(jìn)行改正后利用分步搜索的方法,先搜索由B1、B2載波相位觀測(cè)值組成的單差寬巷觀測(cè)值模糊度,再分別搜索出B1、B2的單差整周模糊度,完成單差模糊度解算,從而實(shí)現(xiàn)BDS單參考站載波相位差分定位。
1 BDS差分定位算法
1.1 BDS誤差改正數(shù)學(xué)模型
安置在測(cè)站i的BDS接收機(jī)同步觀測(cè)衛(wèi)星a的B1、B2偽距觀測(cè)方程和載波相位觀測(cè)方程可表示為:

(1)

當(dāng)參考站j坐標(biāo)已知時(shí),衛(wèi)星a的載波相位的誤差改正數(shù)

(2)
衛(wèi)星載波相位的誤差改正數(shù)包含了參考站的整周模糊度和接收機(jī)鐘差,這2個(gè)參數(shù)雖然是未知的,但可以被用戶站整周模糊度和接收機(jī)鐘差吸收。由式(1)及式(2)可知測(cè)站i和衛(wèi)星a的非差載波相位觀測(cè)值經(jīng)過(guò)誤差改正數(shù)改正后的觀測(cè)方程為


(3)
測(cè)站i上觀測(cè)衛(wèi)星a經(jīng)過(guò)非差誤差改正數(shù)改正后的非差載波相位觀測(cè)值,消除了衛(wèi)星鐘差及硬件延遲,消除或大大消弱了電離層延遲誤差、對(duì)流層延遲誤差、衛(wèi)星軌道誤差等誤差。如果忽略衛(wèi)星軌道、大氣延遲等殘余誤差,可由式(3)進(jìn)一步得到:

(4)
(5)

1.2 載波相位單差寬巷整周模糊度的解算
BDS載波相位高精度定位的關(guān)鍵問(wèn)題是整周模糊度的確定和誤差處理[4]。由于BDS的B1和B2波長(zhǎng)較短,短時(shí)間內(nèi)模糊度解算的成功率較低;當(dāng)噪聲較大時(shí),甚至長(zhǎng)時(shí)間無(wú)法固定模糊度,導(dǎo)致定位結(jié)果的可靠性無(wú)法得到保障。為了提高模糊度解算的成功率及可靠性,可以利用多頻線性組合構(gòu)建波長(zhǎng)較長(zhǎng)的組合觀測(cè)值輔助解算原始頻率整周模糊度[5]。BDS的B1和B2載波相位寬巷組合觀測(cè)值的波長(zhǎng)為0.846 9 m,由于其波長(zhǎng)較長(zhǎng),因而很容易準(zhǔn)確確定寬巷整周模糊度,并且寬巷組合又保證了整周模糊度的整數(shù)性質(zhì),因此由式(5)得到BDS載波相位單差寬巷觀測(cè)方程為

(6)
式中下標(biāo)W為寬巷。偽距非差改正數(shù)改正后的觀測(cè)值加入觀測(cè)方程,以提高位置參數(shù)和模糊度參數(shù)初值的精度,加速模糊度的搜索。偽距觀測(cè)值和載波相位值的權(quán)比為1∶100。
由式(6)可得到BDS載波相位非差寬巷觀測(cè)方程的矩陣形式為
AX+BY=L+V。
(7)
式中:X為坐標(biāo)參數(shù)向量;Y為單差載波相位寬巷整周模糊度參數(shù)向量;A為單差載波相位寬巷觀測(cè)值對(duì)應(yīng)的方向余弦系數(shù)矩陣;B為單差載波相位寬巷整周模糊度對(duì)應(yīng)的設(shè)計(jì)矩陣;L為單差載波相位寬巷觀測(cè)方程對(duì)應(yīng)的常數(shù)項(xiàng);V為單差載波相位寬巷觀測(cè)方程對(duì)應(yīng)的觀測(cè)值殘差。將B1和B2經(jīng)非差改正數(shù)改正后的偽距觀測(cè)方程與式(7)聯(lián)立,以提高位置參數(shù)和整周模糊度參數(shù)初值的精度,加速模糊度的搜索。則其對(duì)應(yīng)的法方程為
(8)
式中:A′為公式聯(lián)立后觀測(cè)值對(duì)應(yīng)的方向余弦系數(shù)矩陣;B′為公式聯(lián)立后模糊度對(duì)應(yīng)的設(shè)計(jì)矩陣;P為權(quán)矩陣。由于其含坐標(biāo)參數(shù)向量和單差寬巷整周模糊度參數(shù)向量,方程是秩虧的,無(wú)法求解未知數(shù)唯一解。在不發(fā)生周跳與信號(hào)連續(xù)的情況下,單差載波相位寬巷整周模糊度為時(shí)不變參數(shù),多個(gè)歷元的觀測(cè)方程聯(lián)合求解可得到唯一解:將法方程疊加并采用最小二乘得到浮點(diǎn)解;再根據(jù)單差寬巷整周模糊度浮點(diǎn)解及其方差協(xié)方差陣,使用LAMBDA算法搜索單差寬巷整周模糊度[6]。
1.3 單差B1、B2載波相位整周模糊度的解算
單差寬巷整周模糊度準(zhǔn)確確定后,寬巷模糊度轉(zhuǎn)化成精度較高的距離值,距離觀測(cè)值的精度得到極大提高,則可得到單差整周模糊度較高精度的浮點(diǎn)解及其協(xié)方差矩陣[7]。這種情況下單差整周模糊度的解算效率和成功率較高,將單差寬巷觀測(cè)值和單差B1載波相位觀測(cè)值組成聯(lián)合觀測(cè)方程為

(9)
式中:B1為B1載波相位單差觀測(cè)值對(duì)應(yīng)的方向余弦矩陣;ΔN1和L1為B1載波相位單差觀測(cè)方程對(duì)應(yīng)的整周模糊度向量和常數(shù)項(xiàng)向量;E為單位矩陣。
單差寬巷整周模糊度準(zhǔn)確確定使得聯(lián)合誤差觀測(cè)方程的狀態(tài)大為改善,可得到單差載波相位整周模糊度較高精度的浮點(diǎn)解和狀態(tài)明顯改善的協(xié)方差矩陣。這種情況下單差載波相位的整周模糊度更容易固定。使用LAMBDA方法可快速搜索固定單差B1整周模糊度,單差B2整周模糊度可由單差B1整周模糊度和單差寬巷整周模糊度的線性關(guān)系得到[8]。將固定正確的單差B1、B2整周模糊度代入單差載波相位觀測(cè)方程可以迅速令坐標(biāo)改正量收斂到cm級(jí)的精度。
2 實(shí)驗(yàn)與結(jié)果分析
本實(shí)驗(yàn)數(shù)據(jù)均采用Trimble R9接收機(jī)采集,利用遼寧省BDS連續(xù)運(yùn)行跟蹤網(wǎng)阜新站作為參考站進(jìn)行4組實(shí)驗(yàn)。采用動(dòng)態(tài)數(shù)據(jù)的動(dòng)態(tài)處理,實(shí)驗(yàn)算例數(shù)據(jù)信息列于表1。
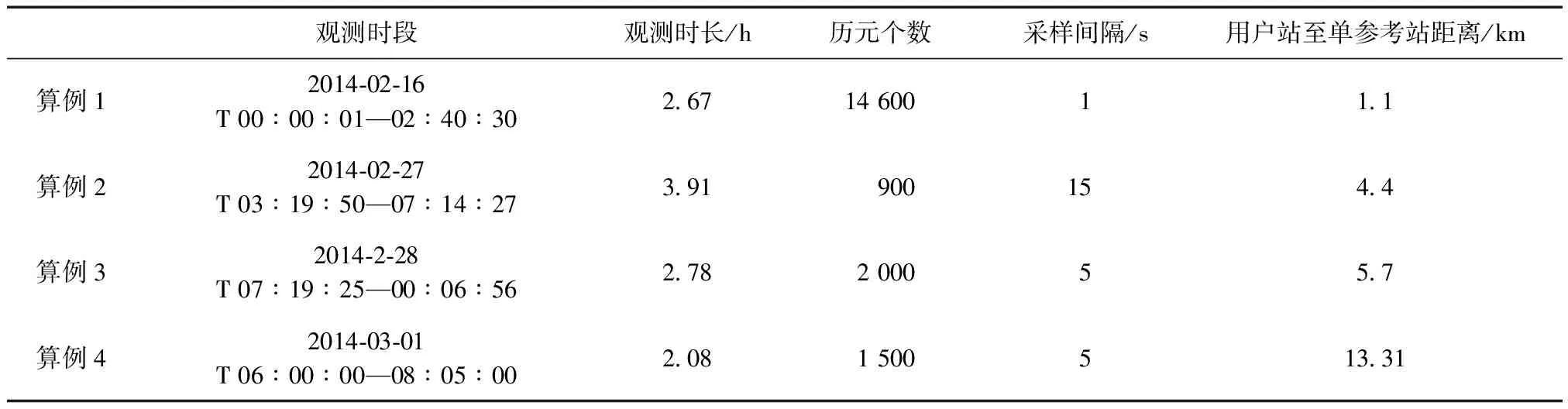
表1 算例數(shù)據(jù)信息
將上述算法進(jìn)行程序?qū)崿F(xiàn)后,為進(jìn)一步驗(yàn)證,采用整個(gè)弧段數(shù)據(jù)利用高精度處理軟件靜態(tài)處理的結(jié)果作為準(zhǔn)確值進(jìn)行比較。4組算例在觀測(cè)時(shí)間段內(nèi)的位置精度衰減因子(position dilution of precision,PDOP)值分別如圖1~圖4所示。
PDOP值是衡量衛(wèi)星定位精度的重要標(biāo)準(zhǔn)。從圖1~圖4中可以看出PDOP值一直在2或2.5左右浮動(dòng),最高不超過(guò)3,當(dāng)PDOP值越小時(shí),衛(wèi)星幾何構(gòu)型越好,定位結(jié)果也越可靠、越理想。從圖中可以看出當(dāng)前BDS的PDOP值在2左右,略大于GPS系統(tǒng);但在亞太地區(qū)滿足要求。
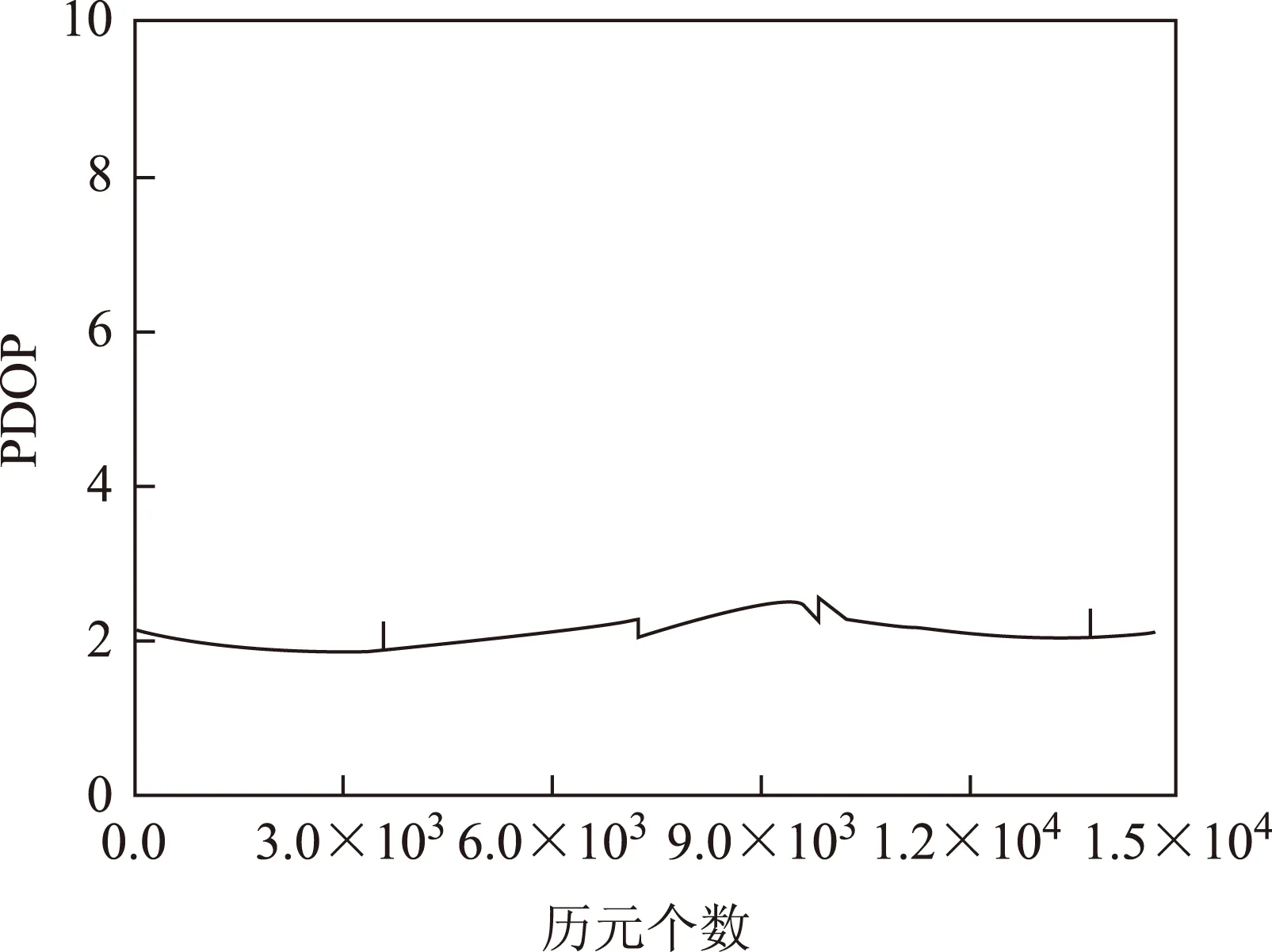
圖1 算例1用戶站的PDOP變化
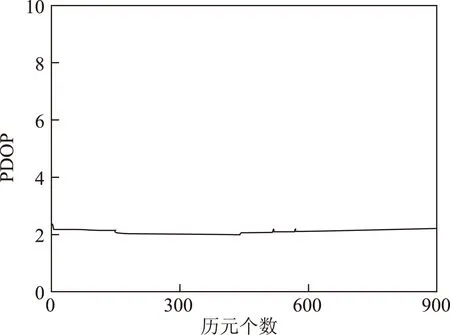
圖2 算例2用戶站的PDOP變化
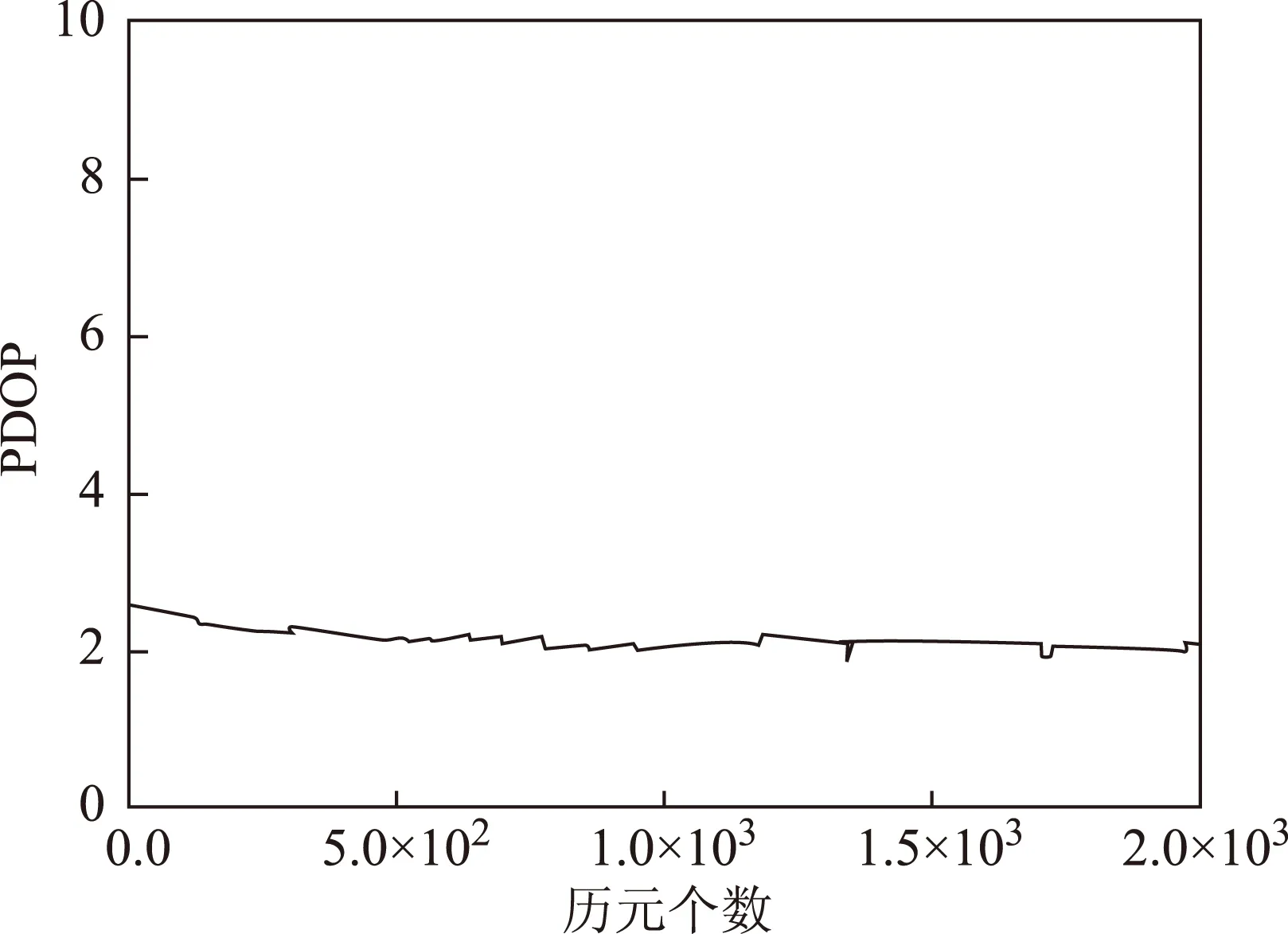
圖3 算例3用戶站的PDOP變化
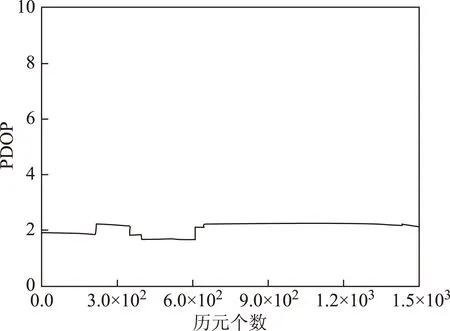
圖4 算例4用戶站的PDOP變化
將每個(gè)歷元定位結(jié)果與計(jì)算結(jié)果比較,分別得到4組算例在東(E)、北(N)、天頂(U)3個(gè)方向的誤差值,如圖5~圖8所示。
從圖5中可以看出:算例1的E方向偏差不超過(guò)2 cm,N方向偏差近似為2 cm,U方向偏差最大不超過(guò)3 cm;在8 000~12 000歷元N和U方向偏差出現(xiàn)了波動(dòng),受到接收機(jī)硬件或外界噪聲干擾。由于該條基線較短,電離層延遲誤差、中性大氣延遲誤差以及軌道誤差幾乎完全得到消除,殘余誤差對(duì)模糊度影響較小。圖6顯示出:算例2的E方向偏差大部分在2.5 cm以內(nèi),最大不超過(guò)5 cm;N方向在110歷元左右出現(xiàn)波動(dòng),最大偏差也不超過(guò)5 cm;U方向也在100至250歷元左右出現(xiàn)小范圍抖動(dòng),可能是由觀測(cè)噪聲引起。從圖7中可以看出:算例3的E方向的偏差大致都在2.5 cm左右;N方向個(gè)別歷元段出現(xiàn)小范圍波動(dòng);U方向大多數(shù)歷元偏差值都在5 cm以內(nèi)。圖8中隨著測(cè)站至參考站的距離增長(zhǎng),電離層延遲和中性大氣延遲誤差的殘差影響最終定位結(jié)果;相比于其他3組算例,算例4的定位結(jié)果在E、N、U方向偏差較大,且偏差較大的歷元數(shù)較多。
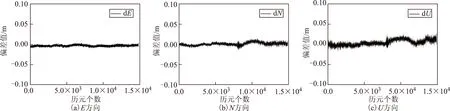
圖5 算例1的E、N、U方向定位結(jié)果差值
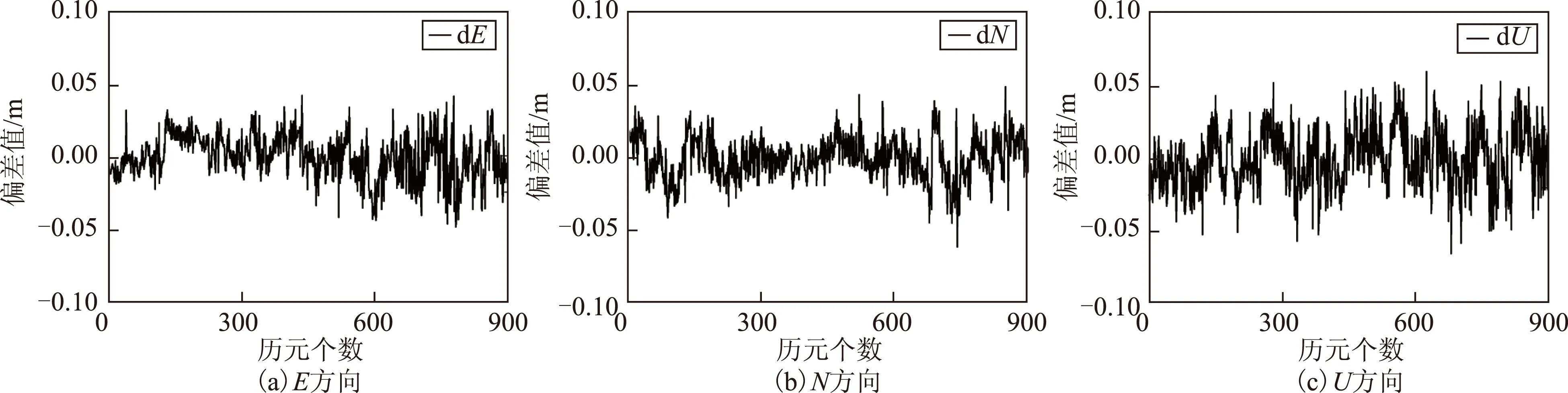
圖6 算例2的E、N、U方向定位結(jié)果差值
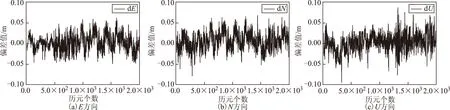
圖7 算例3的E、N、U方向定位結(jié)果差值
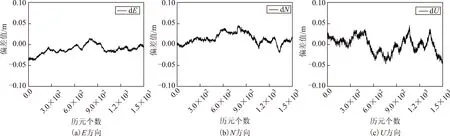
圖8 算例4的E、N、U方向定位結(jié)果差值
解算模糊度時(shí)求得的Ratio值分別如圖9~圖12所示。
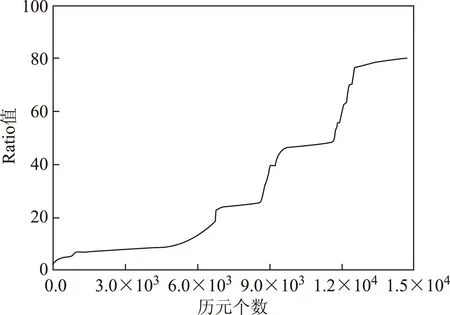
圖9 算例1的Ratio變化
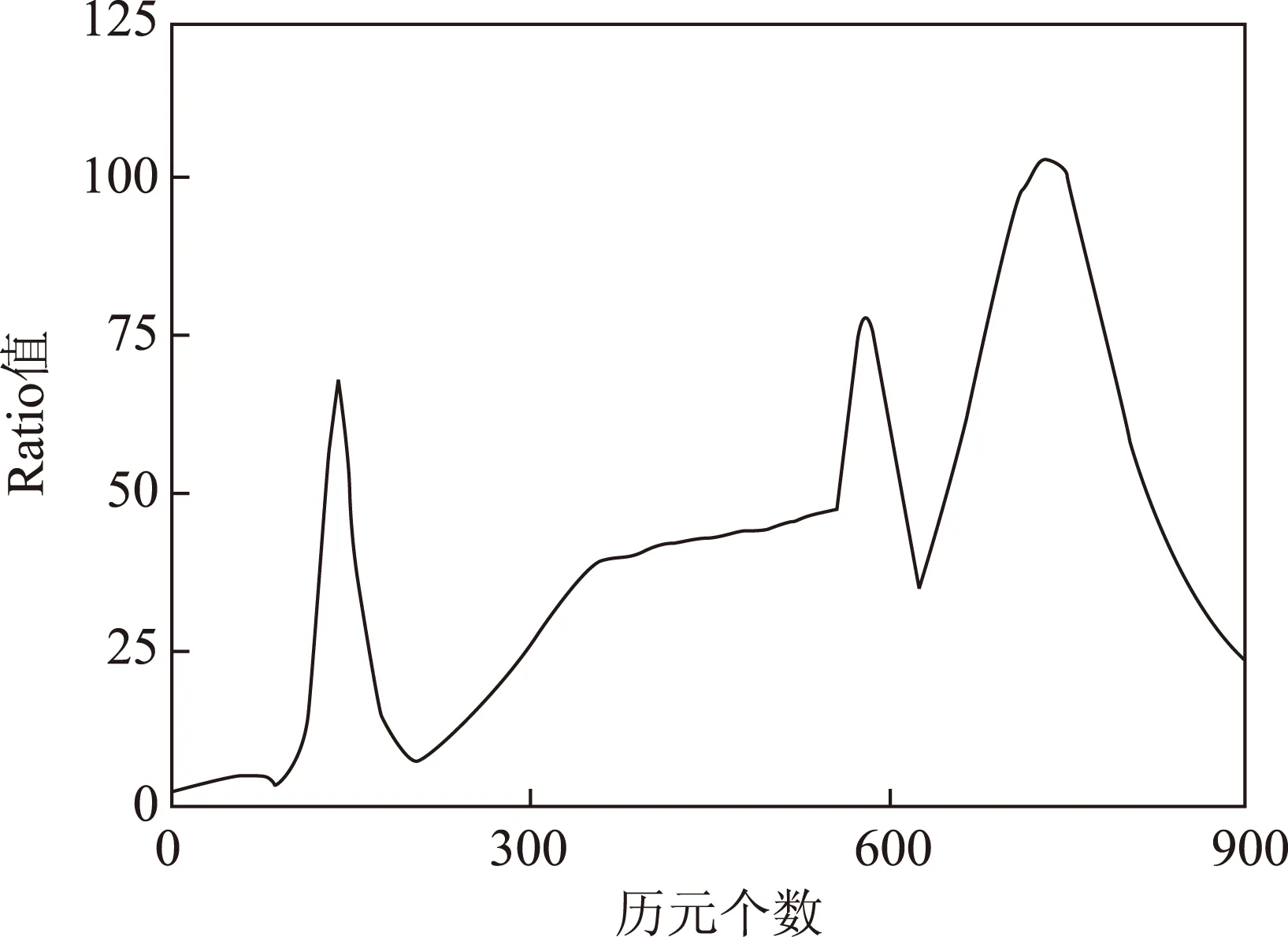
圖10 算例2的Ratio變化
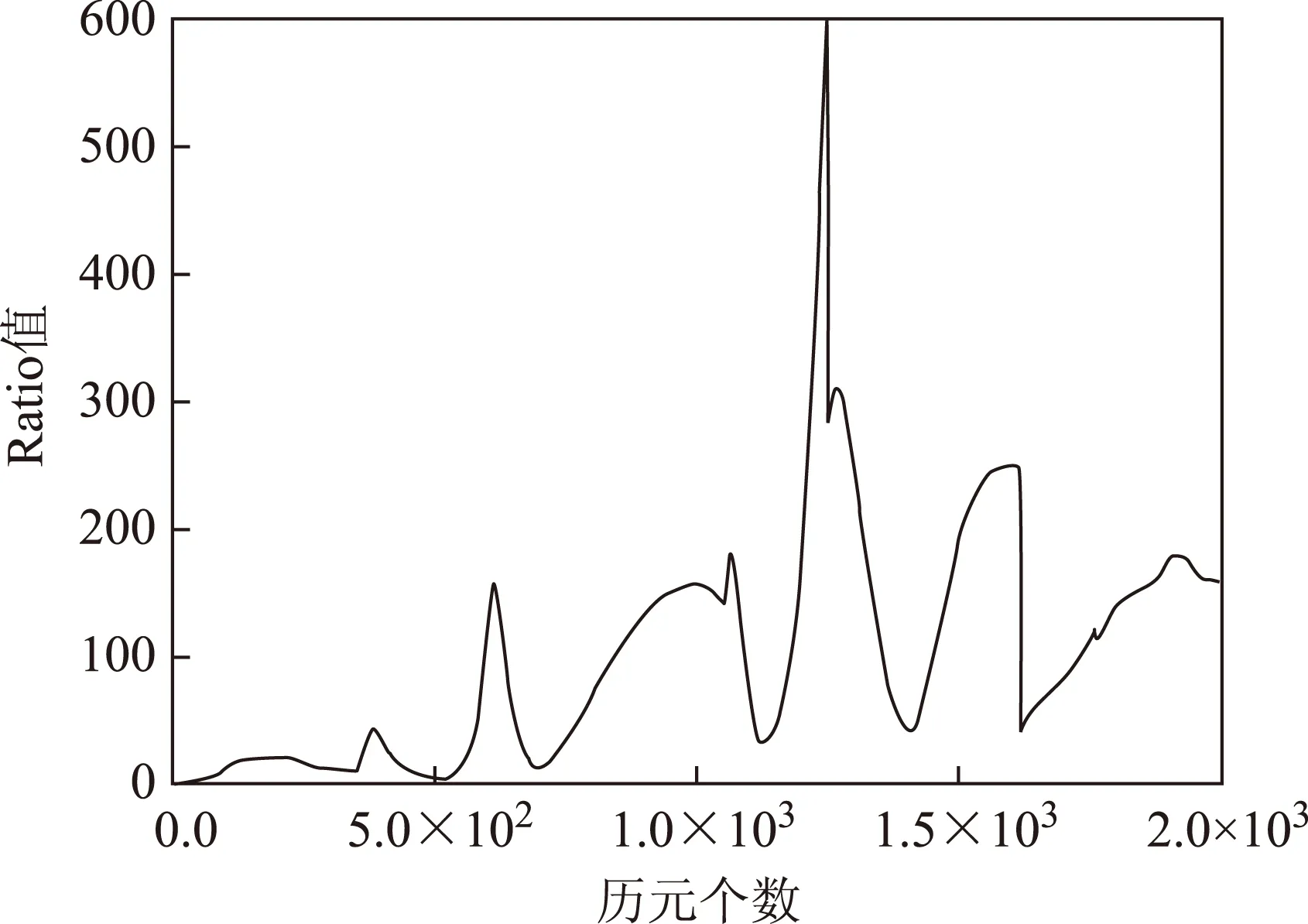
圖11 算例3的Ratio變化
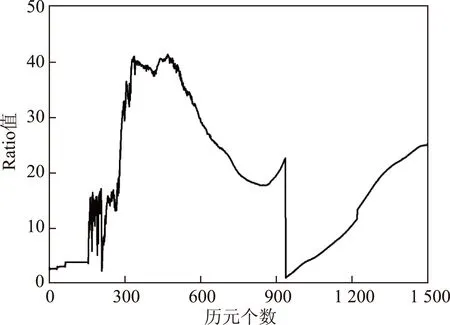
圖12 算例4的Ratio變化
Ratio值是由固定后次優(yōu)的模糊度向量的殘差平方和與最優(yōu)的模糊度向量的殘差平方和的比值計(jì)算得到的。隨著歷元的增加,正確模糊度組合的Ratio值會(huì)越來(lái)越大;當(dāng)超過(guò)某一個(gè)域值,就認(rèn)為模糊度固定正確,一般該閾值為3以上。從圖9~圖12中顯示出4組算例的Ratio值都較快達(dá)到3以上。圖10~圖12中出現(xiàn)若干次大幅波動(dòng)可能是由基準(zhǔn)衛(wèi)星變換、觀測(cè)衛(wèi)星數(shù)目減少或者信號(hào)失鎖造成的,但波動(dòng)過(guò)程中最小Ratio值除個(gè)別歷元外都大于3,可以認(rèn)為其固定成功。將模糊度解算Ratio值統(tǒng)計(jì)結(jié)果列于表2,從表中可以看出隨著測(cè)站至參考站的距離增加,模糊度固定成功所占百分比有小幅度下降;但模糊度固定成功率都在97 %以上。
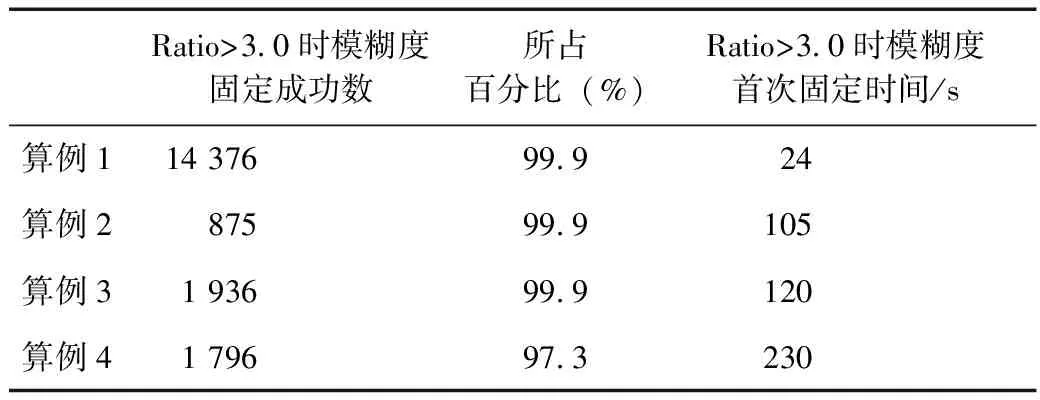
表2 模糊度解算統(tǒng)計(jì)結(jié)果
從表中的4組算例可以看出BDS在U方向上偏差值大于E、N2個(gè)方向,歷元偏差出現(xiàn)波動(dòng)頻率較大。這可能是因?yàn)槟壳癇DS衛(wèi)星數(shù)較少且主要分布在東西方向,所以東西方向誤差小于垂直方向。從圖5~圖8中可以看出,BDS的定位精度可以達(dá)到cm級(jí),滿足定位精度的要求,且與GPS處于同一定位精度級(jí)別。為了便于分析,4組算例的各個(gè)方向偏差值的均方根(root mean square,RMS)值列于表3,從表中可以看出:每組算例的E方向RMS值最小,N方向RMS值略大,U方向RMS值最大,但最大不超過(guò)5 cm,這說(shuō)明U方向偏差值大于E、N2個(gè)方向,精度略差;隨著測(cè)站至參考站的距離增加,各方向的RMS值也在不斷增大,這說(shuō)明定位結(jié)果的誤差與測(cè)站至參考站的距離有關(guān):距離越長(zhǎng),電離層和中性大氣延遲誤差的相關(guān)性越小;大氣殘差影響模糊度的固定,使各方向偏差值不斷加大[9]。
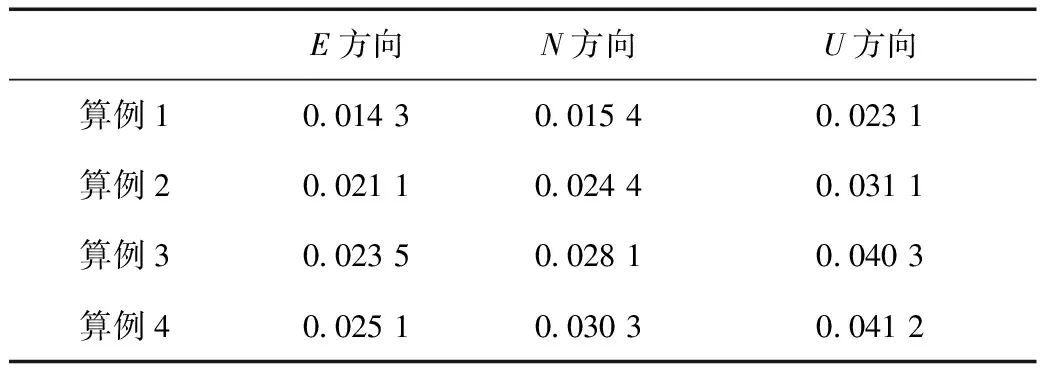
表3 算例定位誤差RMS值 m
3 結(jié)束語(yǔ)
本文利用4組BDS算例數(shù)據(jù)進(jìn)行分析:利用單參考站非差誤差改正數(shù)對(duì)衛(wèi)星進(jìn)行改正后,將B1、B2載波相位觀測(cè)值組成單差寬巷觀測(cè)值;采用搜索算法固定寬巷單差整周模糊度,使B1、B2的單差整周模糊度解算成功率大幅提高,定位精度達(dá)到cm級(jí),與GPS精度相當(dāng),能夠滿足精度要求。隨著B(niǎo)DS的不斷建設(shè)完善,衛(wèi)星數(shù)的逐漸增加,預(yù)計(jì)十幾年后將覆蓋全球,其衛(wèi)星軌道和鐘差產(chǎn)品精度將得到更大程度的改善,BDS定位服務(wù)會(huì)更加可靠。本文介紹的單參考站載波相位差分定位可提供BDS實(shí)時(shí)動(dòng)態(tài)差分法(real-time kinematic,RTK)定位服務(wù),為非差網(wǎng)絡(luò)RTK算法研究提供借鑒。
[1] 楊元喜.北斗衛(wèi)星導(dǎo)航系統(tǒng)的進(jìn)展、貢獻(xiàn)與挑戰(zhàn)[J].測(cè)繪學(xué)報(bào),2010,39(1):1-6.
[2] 施闖,趙齊樂(lè),李敏,等.北斗衛(wèi)星導(dǎo)航系統(tǒng)的精密定軌與定位研究[J].中國(guó)科學(xué) 地球科學(xué),2012,42(6):854-861.
[3] 高星偉,過(guò)靜珺,程鵬飛,等.基于時(shí)空系統(tǒng)統(tǒng)一的北斗與GPS融合定位[J].測(cè)繪學(xué)報(bào),2012,41(5):743-748,755.
[4] 祝會(huì)忠,劉經(jīng)南,唐衛(wèi)明,等.長(zhǎng)距離網(wǎng)絡(luò)RTK基準(zhǔn)站間單歷元整周模糊度確定方法[J].測(cè)繪學(xué)報(bào),2012,41(3):359-365.
[5] 韓紹偉.GPS相位觀測(cè)值的模糊度函數(shù)法和最小二乘法的等價(jià)性及模糊度函數(shù)法的改進(jìn)[J].測(cè)繪學(xué)報(bào),1994,23(4):282-288.
[6] TEUNISSEN P J G.A canonical theory for short GPS baselines,part I:the baseline precision[J].Journal of Geodesy,1997(71):320-336.
[7] 祝會(huì)忠,劉經(jīng)南,唐衛(wèi)明,等.快速解算長(zhǎng)距離網(wǎng)絡(luò)RTK參考站間雙差模糊度的算法研究[J].武漢大學(xué)學(xué)報(bào)·信息科學(xué)版,2012,37(6):67-71.
[8] 趙亮,葉世榕,陳德忠,等.組合觀測(cè)值確定L1﹠L2的模糊度的探討[J].測(cè)繪地理信息,2013,38(2):26-28.
[9] 李博峰,沈云中,馮延明.利用三頻GNSS進(jìn)行長(zhǎng)距離實(shí)時(shí)精密導(dǎo)航[J].武漢大學(xué)學(xué)報(bào)·信息科學(xué)版,2009,34(7):782-786.
Method of carrier phase difference positioning of single reference station of BDS
YANG Qiushi,XU Aigong,ZHU Huizhong,GAO Meng
(School of Geomatics,Liaoning Technical University,F(xiàn)uxin,Liaoning 123000,China)
In order to improve the accuracy of carrier phase difference positioning of the single reference station of BDS,the paper introduced the method providing un-differential error corrections of carrier phase observations by single reference station to correct the observation,and used the B1 and B2 dual frequency observations of BDS to realize the carrier phase difference of single reference station:firstly B1 and B2 of carrier phase observations were needed to compose the single difference carrier phase wide lane observations,and the single difference wide lane ambiguity was fixed with search algorithm and then the single difference observation equation of wide lane and B1 was established,then the integer ambiguity of carrier phase was fixed with search algorithm.Experimental result showed that the single difference ambiguity resolution could be resolved by BDS carrier phase differential positioning with an un-differential error corrections of single reference station,whose precision could reach centimeter level with high efficiency and simple location algorithm of user side.
BDS;single reference station;wide lane combination;integer ambiguity
2016-01-05
國(guó)家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2016YFC0803102);國(guó)家自然科學(xué)基金資助項(xiàng)目(41504010、41474020);遼寧省高等學(xué)校創(chuàng)新團(tuán)隊(duì)項(xiàng)目(LT2015013);2014年遼寧省博士啟動(dòng)基金項(xiàng)目(20141141)。
楊秋實(shí)(1991—),男,遼寧阜新人,碩士研究生,研究方向?yàn)镚NSS高精度實(shí)時(shí)動(dòng)態(tài)定位算法及應(yīng)用。
楊秋實(shí),徐愛(ài)功,祝會(huì)忠,等.BDS單參考站載波相位差分定位方法[J].導(dǎo)航定位學(xué)報(bào),2016,4(4):59-64.(YANG qiushi,Xu aigong,Zhu huizhong,et al.Method of carrier phase difference positioning of single reference station of BDS[J].Journal of Navigation and Positioning,2016,4(4):59-64.)
10.16547/j.cnki.10-1096.20160412.
P228
A
2095-4999(2016)04-0059-06
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50
