應用特征諧波消除改進脈振高頻電壓注入法
2017-01-07 02:32:21于帥章瑋
電機與控制學報 2016年12期
關鍵詞:實驗
于帥, 章瑋
(浙江大學 電氣工程學院,浙江 杭州 310027)
應用特征諧波消除改進脈振高頻電壓注入法
于帥, 章瑋
(浙江大學 電氣工程學院,浙江 杭州 310027)
針對永磁同步電機無位置傳感器矢量控制中傳統脈振高頻電壓注入法存在的估算角度滯后、與中高速無位置傳感器控制技術切換困難等問題提出改進方法。引入特征諧波消除的方式取代低通濾波器,同時充分考慮定子電阻對位置估算的影響,修改誤差矯正項以減小估算誤差,并給出了改進后的脈振高頻電壓注入法的完整實現方式。應用特征諧波消除的方式得到誤差校正項,估算的轉子位置更加精確,用特征諧波消除的方式去除高頻電流信號,不會引起電流畸變和相位滯后。用改進算法得到的轉子位置及轉速作為反饋對電機進行閉環控制,可以改善電機低速下的動態特性。仿真分析和實驗結果證明了該方法的有效性。
永磁同步電機;無位置傳感器;脈振高頻電壓注入;重構;特征諧波消除
0 引 言
在永磁同步電機的矢量控制中,轉子的位置和轉速信息較為重要,無位置傳感器控制是用估算轉子位置和轉速的方式取代機械的轉子位置傳感器,得到了越來越廣泛的應用。當電機運行于零速或低速時,依賴反電動勢的無位置傳感器控制技術難以實現[1],而高頻電壓注入法可以根據轉子的凸極性估算轉子的位置[2],較多的應用于電機零速或低速區無位置傳感器控制。高頻電壓注入法主要分為旋轉高頻電壓注入法和脈振高頻電壓注入法。旋轉高頻電壓注入法主要用于凸極率較大的內嵌式永磁同步電機,脈振高頻電壓注入法不僅可以應用于內嵌式永磁同步電機,通過利用電機的飽和凸極效應,還可以應用于表貼式永磁同步電機[3]。由于高頻信號注入的方式不同,和旋轉高頻電壓注入法相比,脈振高頻電壓注入法產生的轉矩脈動較小。
傳統的脈振高頻電壓注入法使用低通濾波器對高頻響應電流進行解算和去除[4],這種方式會帶來電流相移等問題,在實際應用中很難達到較好的控制效果,加大了脈振高頻電壓注入法的實現難度。而且中、高速區轉子位置的估算需要用到不含高頻響應電流的α-β相電流,傳統方法由于相移等問題,在從低速向中、高速無位置傳感器控制切換時會遇到沖擊。因此本文在對傳統脈振高頻電壓注入法進行分析的基礎上,提出了特征諧波消除[5]的方法取代低通濾波器,通過增加諧波補償前饋環節的方式去除高頻電流,同時考慮定子電阻對轉子位置估算的影響,修改矯正誤差項,最后通過仿真和實驗驗證了提出方法的有效性。
1 高頻響應電流信號處理
在轉子參考坐標系即d-q坐標系下,永磁同步電機的電壓方程如式(1)所示[7]。
(1)
式中:ud、uq分別為d、q軸電壓分量;Rs為定子電阻;id、iq分別為d、q軸電流分量;ωe為轉子電角速度;ψd、ψq分別為d、q軸磁鏈;其中磁鏈如式(2)所示:
(2)
式中:Ld、Lq分別為d、q軸定子電感;ψf為永磁體磁鏈。在推導高頻響應電流時,由于高頻信號的角速度ωh遠大于轉子的電角速度ωe,因而永磁體磁鏈ψf隨時間的變化及旋轉電動勢ωeψd、ωeψq可以忽略不計。
(3)
傳統的脈振高頻電壓注入法控制框圖如圖1所示[8]。一般忽略定子電阻Rs,將q軸電流經過低通濾波等處理,估算出轉子位置和轉速。

圖1 傳統的脈振高頻電壓注入法控制框圖Fig.1 Block diagram of traditional pulsating high-frequency voltage injection method
正如前面提到,在國際單位制下,如果Rs比Ld、Lq大兩到三個數量級,在忽略定子電阻的前提下求取高頻響應電流會引起較大偏差。因此計及定子電阻的影響,d-q坐標系下電機的高頻電壓方程如式(4)所示:
(4)

(5)

2.2.2 不同柱溫對fs/i的影響 考察了不同柱溫(25、28、30、32、35 ℃)對各fs/i的影響,結果(表3)朝藿定B、朝藿定A、朝藿定C、淫羊藿苷、木犀草素、槲皮素、川陳皮素、山柰酚、寶藿苷Ifs/i的RSD依次為0.57%、1.18%、0.98%、1.08%、2.08%、1.90%、0.76%、2.45%和2.81%,表明柱溫的波動對各成分fs/i無顯著影響。

(6)


(7)


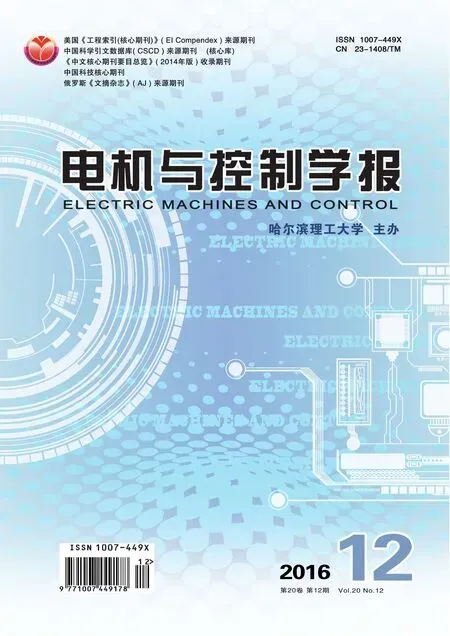
圖2 i幅值提取Fig.2 Extraction ofiamplitude

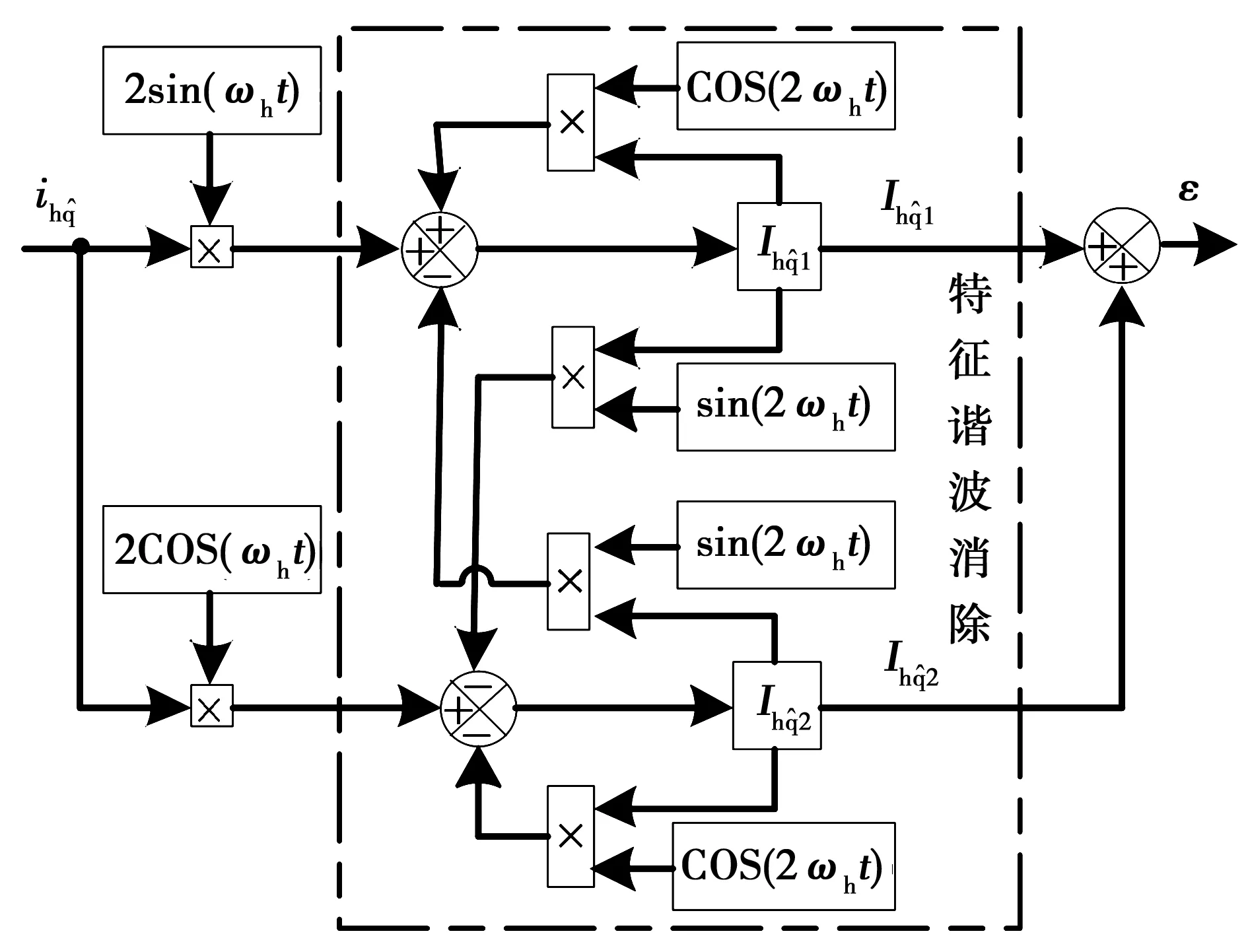
圖3 i幅值提取及誤差矯正項構成Fig.3 Extraction ofiamplitude and construction of the error correction term
2 脈振高頻電壓注入法的實現
應用特征諧波消除的脈振高頻電壓注入法的控制框圖如圖5所示。
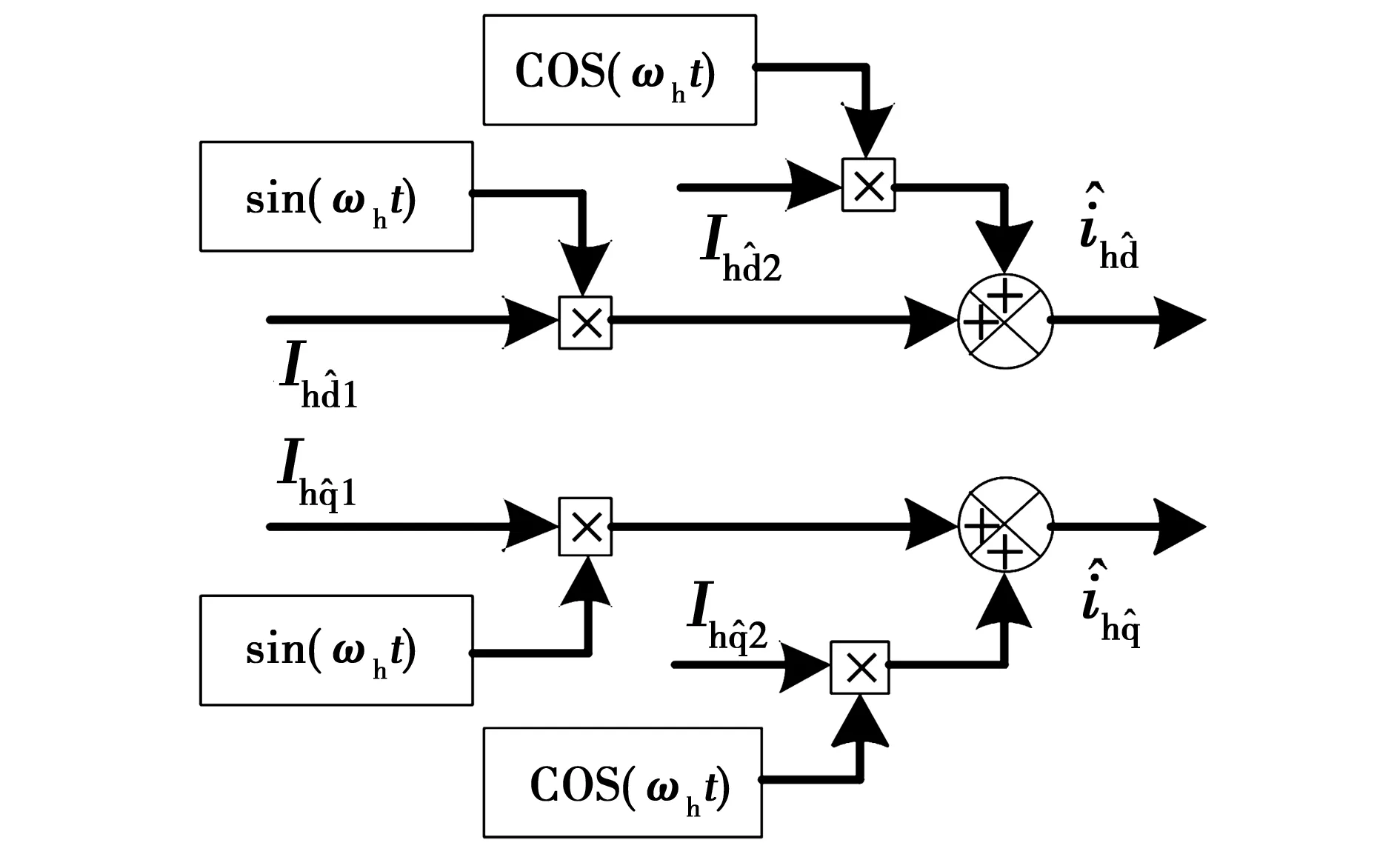
圖4 高頻響應電流i、i的重構Fig.4 Construction of high-frequency currentiandi
圖5中的位置跟蹤觀測器可以根據圖6所示的方式進行構造,誤差校正項ε的表達式已在公式(6)中給出。


圖5 應用特征諧波消除的脈振高頻電壓注入法控制框圖Fig.5 Block diagram of improved pulsating high-frequency voltage injection with characteristic harmonic elimination

圖6 位置跟蹤觀測器模型Fig.6 Model of position tracking observer

圖7 初始位置補償角度解算Fig.7 Calculation of the compensation angleof initial position
3 仿真和實驗分析
為了驗證以上控制策略,在Matlab/SIMULINK平臺上對一臺外轉子永磁同步電機搭建了仿真模型進行仿真并進行了對應的實驗驗證。電機轉子永磁體為表貼式,在電磁性能上屬于隱極轉子結構。電機參數如表1所述。
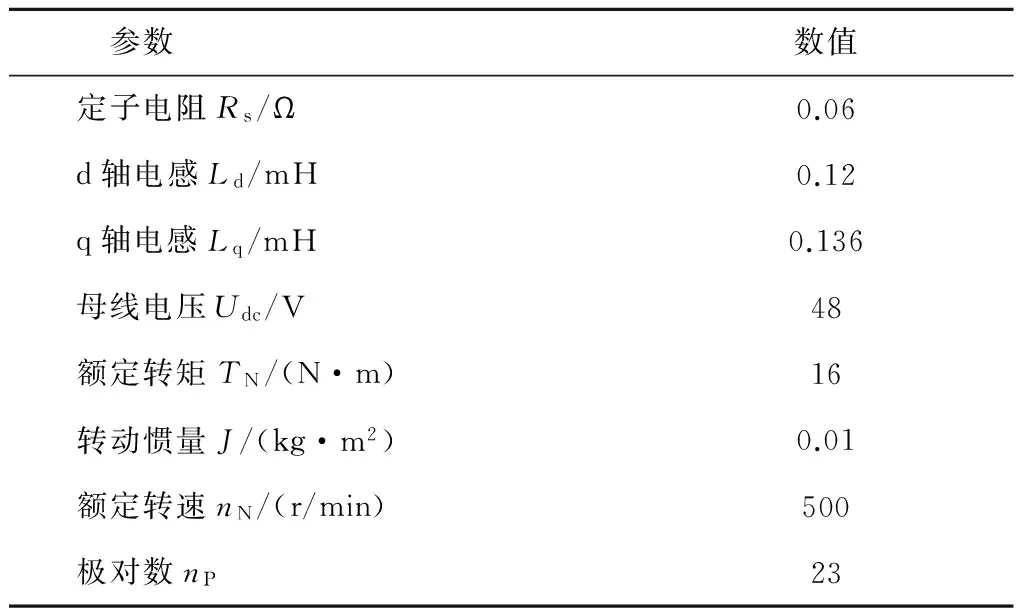
表1 電機參數Table 1 Parameters of motor

從圖8與圖9的對比可以看出,應用特征諧波消除法去除高頻響應電流效果較好,ifα、ifβ中高次諧波含量較少,電流畸變較傳統方法小。同樣條件下,仿真中應用傳統方法的位置估算誤差為20°左右,應用特征諧波消除的脈振高頻電壓注入法的位置估算誤差不到10°。

圖8 應用傳統脈振高頻電壓注入法的仿真結果Fig.8 Simulation results of the traditional pulsating high-frequency voltage injection method
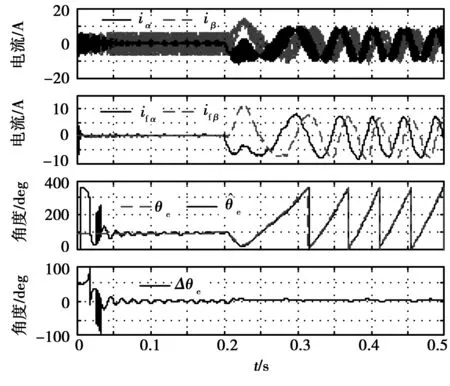
圖9 引入特征諧波消除法的仿真結果Fig.9 Simulation results of the method with the characteristic harmonic elimination
在實驗中對上述隱極式永磁同步電機應用改進的脈振高頻電壓注入法進行無位置傳感器控制,測量電機低速時的運行特性,對該控制方法進行實驗驗證。實驗平臺還包括直流電源、測功機、30 kW的驅動器等,驅動器的控制芯片為TMS320F28234。實驗數據通過通訊模塊傳輸到電腦中,實驗系統框圖如圖10所示。將脈振高頻電壓注入法應用到該電機的啟動上,速度達到一定值后可切換到其他適用于中、高速的無位置傳感器控制策略。
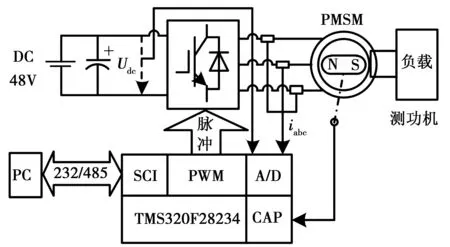
圖10 實驗系統框圖Fig.10 Block diagram of experimental system


圖11 高頻響應電流的去除Fig.11 Elimination of the high-frequency current

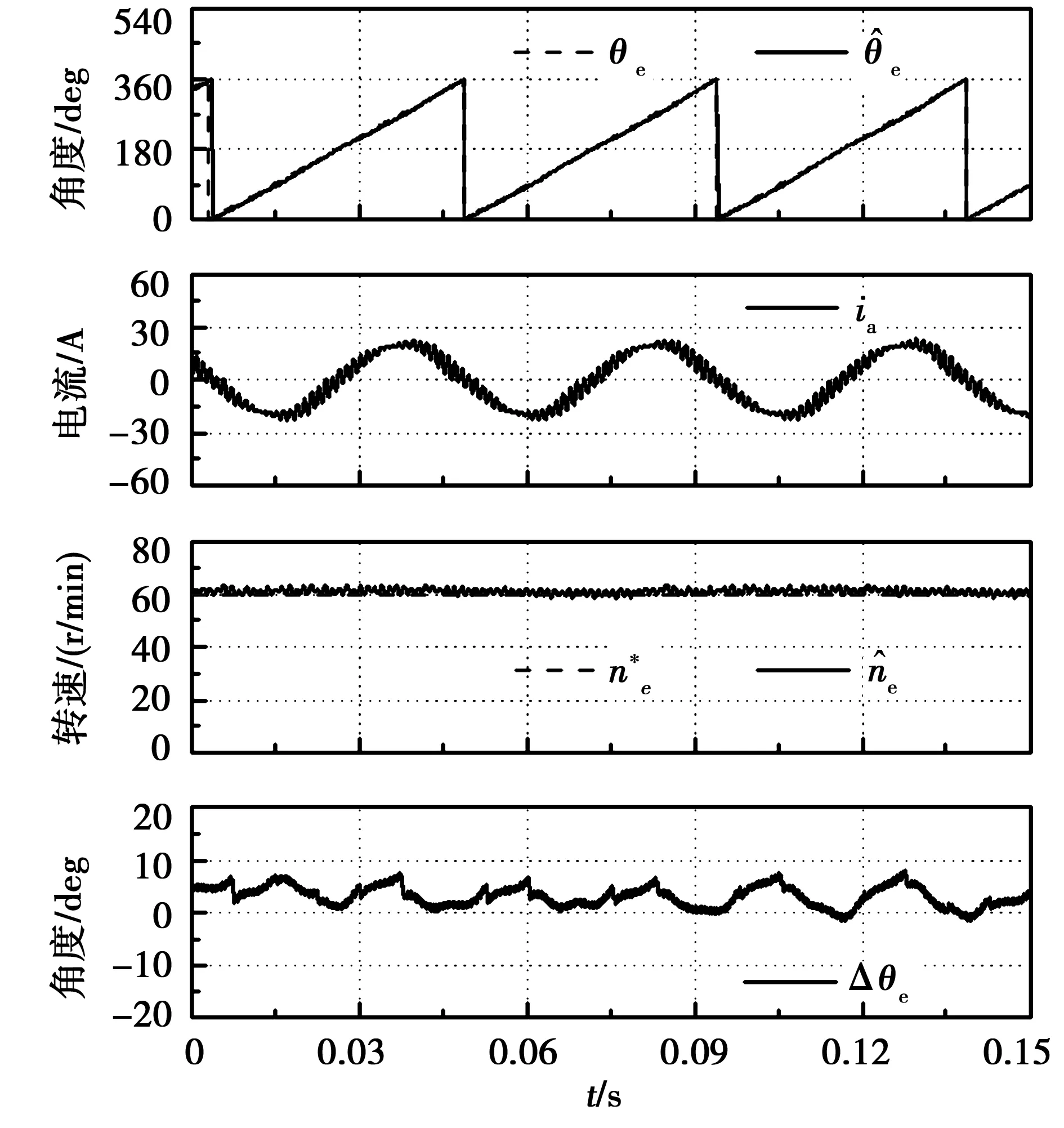
圖12 轉子位置和轉速估算結果Fig.12 Estimation results of the rotor position and speed
為了測試無位置傳感器控制系統的動態特性,當電機轉速為90 r/min時,負載轉矩由零突變到額定轉矩以及由額定轉矩突變到零,這兩種情況下的電機動態特性如圖13、圖14所示。由圖中可以看出,電機轉速在1.5 s內被調節到參考轉速,位置估算誤差在15°以下,系統可以通過調節達到穩定。

在仿真和實驗中對改進的脈振高頻電壓注入法的控制效果進行了驗證,仿真結果包括電機的啟動過程,實驗結果包括電機的穩態運行和動態響應。仿真和實驗結果均表明,應用特征諧波消除的方式取代低通濾波器,高頻響應電流去除效果較好,不引起相電流相位的滯后,轉子位置估算較精確,穩態時位置估算誤差在10°以下,動態時位置估算誤差在15°以下。
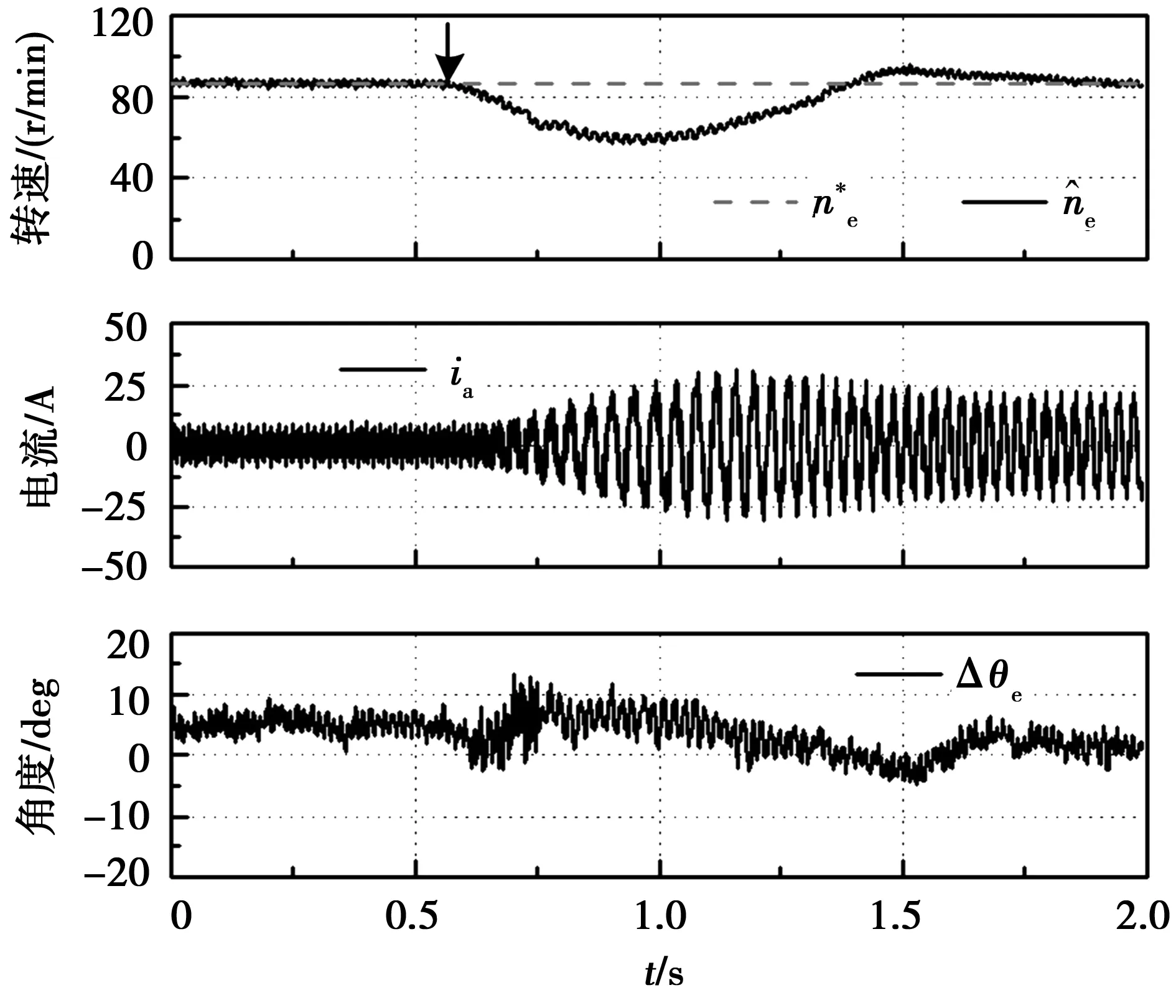
圖13 突加16 N·m轉矩時電機的動態特性Fig.13 Stepping up of 16 N·m load torque
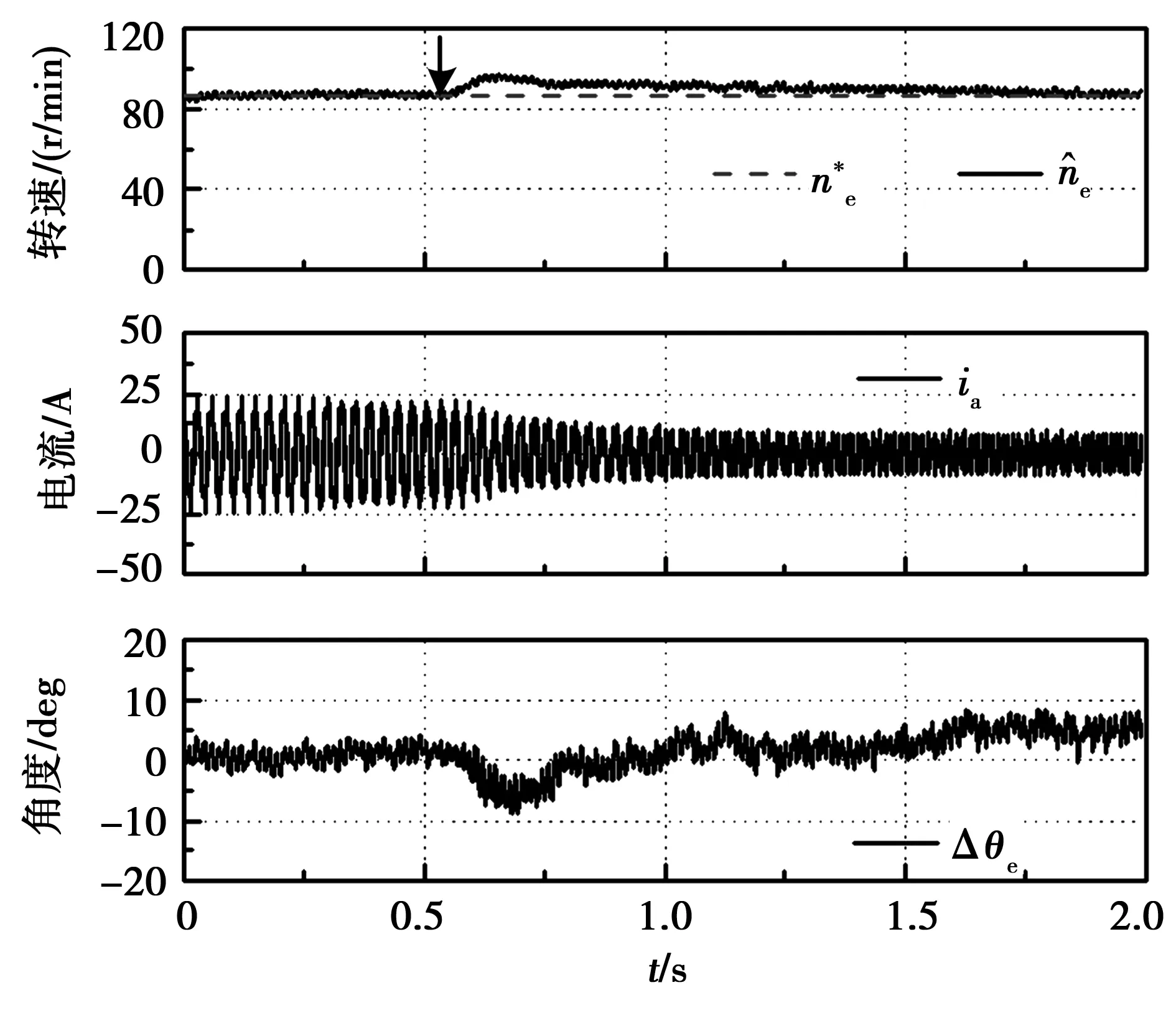
圖14 突減16 N·m轉矩時電機的動態特性Fig.14 Stepping down of 16 N·m load torque

圖16 參考轉速突降時電機的響應Fig.16 Stepping down of the reference speed
4 結 論
脈振高頻電壓注入法適用于永磁同步電機零速或低速區無位置傳感器控制。對傳統的脈振高頻電壓注入法進行改進,將特征諧波消除的方法應用到脈振高頻電壓注入法中,取代低通濾波器,可避免產生電流波形畸變和相移,能更有利于平滑地切換到中、高速的無位置傳感器控制。仿真和實驗結果表明,改進的脈振高頻電壓注入法估算的轉子位置更加精確,同時能滿足低速運行時動態性能的要求。
[1] 李永東,朱昊.永磁同步電機無速度傳感器控制綜述[J].電氣傳動,2009,39(9):3-10. LI Yongdong,ZHU Hao.Overview of sensorless control of permanent magnet synchronous motors[J].Electric Drive,2009,39(9):3-10.
[2] CORLEY M J,LORENZ R D.Rotor position andvelocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications,1998,34(4): 784-789.
[3] 秦峰,賀益康,劉毅,等.兩種高頻信號注入法的無傳感器運行研究[J].中國電機工程學報,2005,25(5):116-121. QIN Feng,HE Yikang,LIU Yi,et al.Comparative investigation of sensorless control with two high-frequency signal injection schemes[J].Proceedings of the CSEE,2005,25(5):116-121.
[4] 賈洪平,賀益康.基于高頻注入法的永磁同步電動機轉子初始位置檢測研究[J].中國電機工程學報,2007,27(15):15-20. JIA Hongping,HE Yikang.Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J].Proceedings of the CSEE,2007,27(15):15-20.
[5] 劉景暉.基于特征諧波消除的STATCOM電流優化方法研究[D].上海: 上海交通大學,2013.
[6] 王志新,林環城,陸斌鋒,等.脈振高頻電壓注入PMSM凸極特性實驗檢測研究[J].電機與控制學報,2015,19(3):20-24. WANG Zhixin,LIN Huancheng,LU Binfeng,et al.Experimental research of PMSM salient characteristic using pulsating high-frequency voltage injection[J].Electric Machines and Control,2015,19(3):20-24.
[7] 王成元,夏加寬,楊俊友,等.電機現代控制技術[M].北京: 機械工業出版社,2006: 106-110.
[8] 鄭昌陸,胡月波.基于高頻脈振電壓注入的內置式永磁同步電機控制[J].電氣傳動自動化,2015,1:10-15. ZHENG Changlu,HU Yuebo.Control method of interior permanent magnet synchronous motor basedon high-frequency pulsating voltage injection[J].Electric Drive Automation,2015,1:10-15.
[9] KIM H,HARKE M C,LORENZ R D.Sensorless control of interior permanent-magnet machine drives with zero-phase lag position estimation[J].IEEE Transactions on Industry Applications,2003,39(6): 1726-1733.
[10] GONG L M,ZHU Z Q.Robust initial rotor positi-on estimation of permanent-magnet brushless AC machines with carrier-signal-injection-based sensorless control[J].IEEE Transactions on Industry Applications,2013,49(6): 2602-2609.
[11] 廖勇,沈朗,姚駿,等.改進的面貼式永磁同步電機轉子初始位置檢測[J].電機與控制學報,2009,13(2):203-207. LIAO Yong,SHEN Lang,YAO Jun,et al.Initial rotor position detection for surface mounted PMSM based on rotating high frequency signal injection[J].Electric Machines and Control,2009,13(2):203-207.
(編輯:劉素菊)
Improved pulsating high-frequency voltage injection with characteristic harmonic elimination
YU Shuai, ZHANG Wei
(College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China)
The traditional pulsating high-frequency voltage injection (PHFVI) method has problems such as estimated rotor position lag and difficulty in switching to higher speed region.To solve these problems,the characteristic harmonic elimination (CHE) method is applied to replace the traditional low pass filter.Besides,taking the stator resistance into consideration,a modified estimation error correction term was proposed to reduce the elimination error.It resulted in more accurate estimated position,less current distortion and less phase lag.Using the estimated position and speed as feedbacks in speed regulation loop can improve low speed dynamic performance of the motor.The complete scheme of the proposed method was given.Simulation and experimental results are demonstrated in detail to verify the feasibility and advantages of the proposed scheme.
permanent magnet synchronous motor; position sensorless; pulsating high-frequency voltage injection; reconstruction; characteristic harmonic elimination
2016-01-25
浙江省自然科學基金(LY12E07002)
于 帥(1990—),女,碩士研究生,研究方向為永磁同步電機的無位置傳感器控制; 章 瑋(1967—),女,博士,副教授,碩士生導師,研究方向為交流電機的優化設計和控制策略。
章 瑋
10.15938/j.emc.2016.12.003
TM 351
:A
:1007-449X(2016)12-0017-08
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55