伺服電機驅動連鑄結晶器振動位移系統滑模控制
2017-01-07 02:15:51劉樂李智方一鳴李建雄
電機與控制學報 2016年12期
劉樂, 李智, 方一鳴,2, 李建雄
(1.燕山大學 工業計算機控制工程河北省重點實驗室,河北 秦皇島 066004;2.國家冷軋板帶裝備及工藝工程技術研究中心,河北 秦皇島 066004)
伺服電機驅動連鑄結晶器振動位移系統滑模控制
劉樂1, 李智1, 方一鳴1,2, 李建雄1
(1.燕山大學 工業計算機控制工程河北省重點實驗室,河北 秦皇島 066004;
2.國家冷軋板帶裝備及工藝工程技術研究中心,河北 秦皇島 066004)
針對伺服電機驅動的連鑄結晶器振動位移系統中存在減速器齒輪間隙和偏心軸機械零位偏移等問題,提出了一種基于干擾觀測器的反步滑模控制方法。首先,針對減速器齒輪間隙和偏心軸機械零位偏移等擾動不確定項以及負載擾動,采用干擾觀測器對其構成的復合干擾進行逼近估計,使觀測誤差在有限時間收斂,并將觀測值動態補償到控制器中,提高了系統的控制精確度;其次,基于反步法完成位移系統動態滑模控制器的設計,提高了系統狀態的收斂速度,增強了系統的魯棒性。仿真結果表明,所設計的干擾觀測器能夠準確、快速的估計出系統存在的干擾及負載轉矩,且位移控制系統能夠實現位移的漸近跟蹤控制。
伺服電機;連鑄結晶器;干擾觀測器;反步控制;滑模控制
0 引 言
連鑄是鋼鐵生產的中間環節,結晶器作為連鑄環節的核心設備,對鑄坯表面質量、拉坯速度的快慢起著決定性作用。目前,國內外普遍采用的連鑄結晶器非正弦振動發生裝置是由電液伺服系統驅動的,但其存在傳動系統復雜、控制精確度低等不足。本文中的伺服電機驅動的連鑄結晶器振動系統具有傳動系統簡化、結構緊湊等優點[1]。伺服電機是按單方向連續轉動,避免了電機頻繁的正反轉啟停。但是由于伺服電機通過聯軸器、減速器、偏心軸連桿機構驅動連鑄結晶器,中間機械機構存在一定的不確定性,影響了結晶器振動的穩定性。
因此,為了保證結晶器振動的平穩性,需要建立正確的系統模型并采取可靠控制算法。文獻[2]建立了伺服電機驅動的連鑄結晶器振動系統機理模型,為系統控制器的設計奠定了良好的基礎。文獻[3]采用模糊自整定PID控制器實現了連鑄結晶器振動位移系統對期望波形的精確跟蹤。但是,考慮到系統中存在的干擾以及負載擾動,常規的PID控制方法很難有效的對干擾進行補償控制。文獻[4]采用非奇異終端滑模負載觀測器,通過使觀測誤差在有限時間內收斂,實現對負載轉矩的估計。文獻[5]和文獻[6]提出的非線性干擾觀測器結構簡單,運算量小,且可以獲得高精確度的估計值;但其假設復合干擾變化緩慢,而該假設在絕大多數情況下是不成立的,這在某種程度限制了非線性干擾觀測器(NDO)的應用。
反步法是一種有效的非線性控制方法[7-8],它采用遞歸設計,很好地解決了對象參數不確定的魯棒控制問題。滑模變結構控制是另一種非線性魯棒控制方法[9-10],選取了合適的滑模面,就能夠有效地抑制系統中非線性環節的影響,同時對外界干擾和參數攝動具有較強的魯棒性。近年來,國內外學者結合反步控制與滑模控制的優點,提出了反步滑模控制方法,并將其應用到非線性系統控制器設計中。文獻[11]針對非線性系統跟蹤問題,提出了一種新的反步滑模控制策略,保證了閉環系統的全局魯棒性和穩定性;文獻[12]將反步滑模控制應用到永磁同步電機位置伺服系統中,并對不確定因素的上界進行了自適應估計,獲得了較好的位置跟蹤效果。
基于上述分析,針對機械部分存在復合擾動的伺服電機驅動的連鑄結晶器振動位移系統,本文提出一種基于干擾觀測器的反步滑模控制方法。首先,針對系統中存在的減速器齒輪間隙和偏心軸機械零位偏移等擾動不確定項以及負載擾動,設計非線性干擾觀測器對復合干擾進行估計補償;其次,設計反步滑模控制器,以提高系統狀態的收斂速度,增強系統的魯棒性。最后,通過仿真研究驗證本文所設計控制器能夠保證結晶器位移的漸近跟蹤控制。
1 伺服電機驅動的連鑄結晶器振動系統數學模型
伺服電機驅動的連鑄結晶器振動系統裝置圖如圖1所示。伺服電機通過減速器、偏心軸連桿機構,連接到結晶器振動臺,驅動結晶器實現非正弦(或正弦)振動。該裝置通過調整伺服電機的期望轉速給定,可以實現結晶器按照不同波形振動。
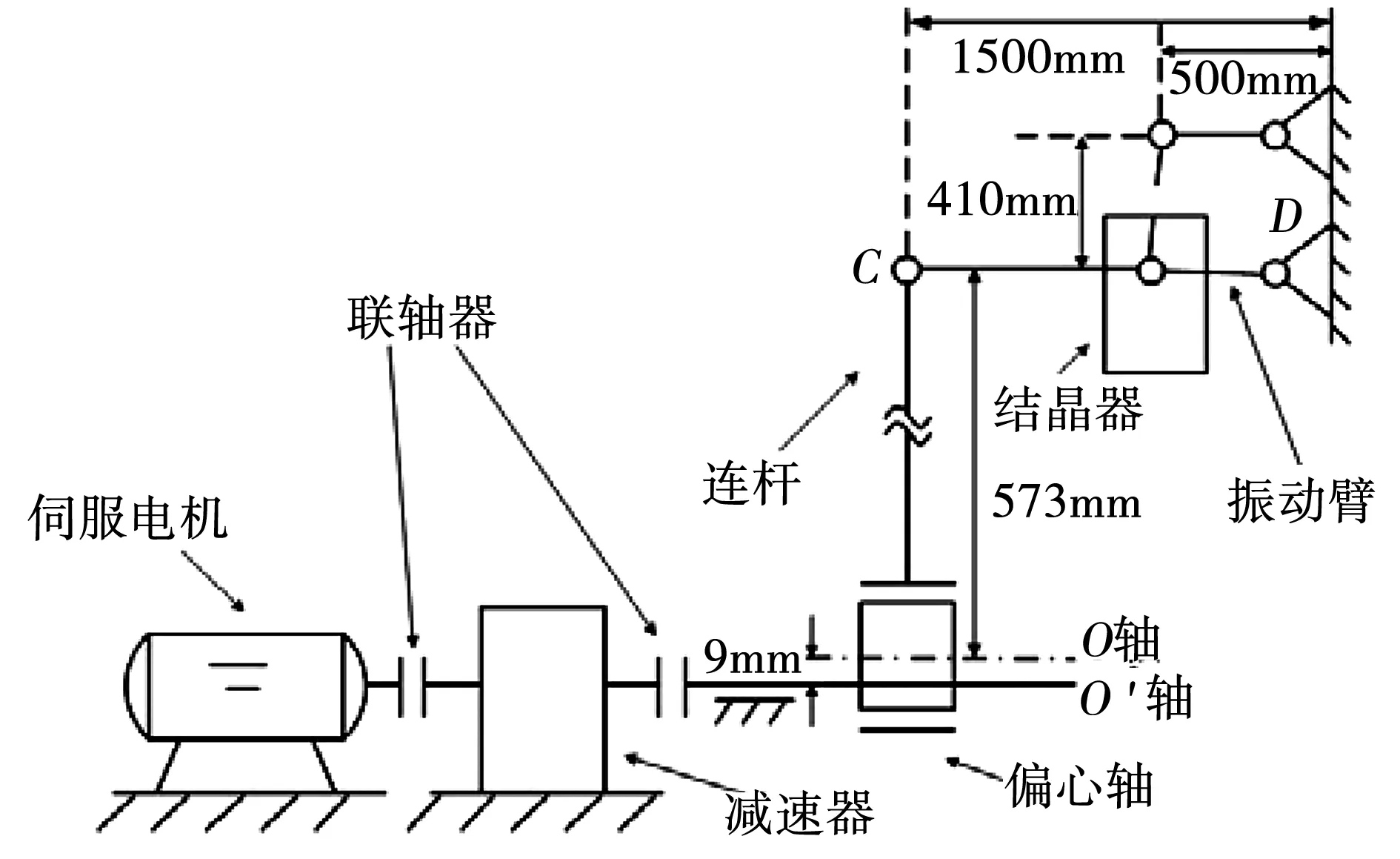
圖1 伺服電機驅動的連鑄結晶器振動臺系統結構原理圖Fig.1 Wtructure diagram of system of oscillation platform of continuous casting mold driven by servo motor
伺服電機驅動的連鑄結晶器振動系統數學模型可表示為:
(1)
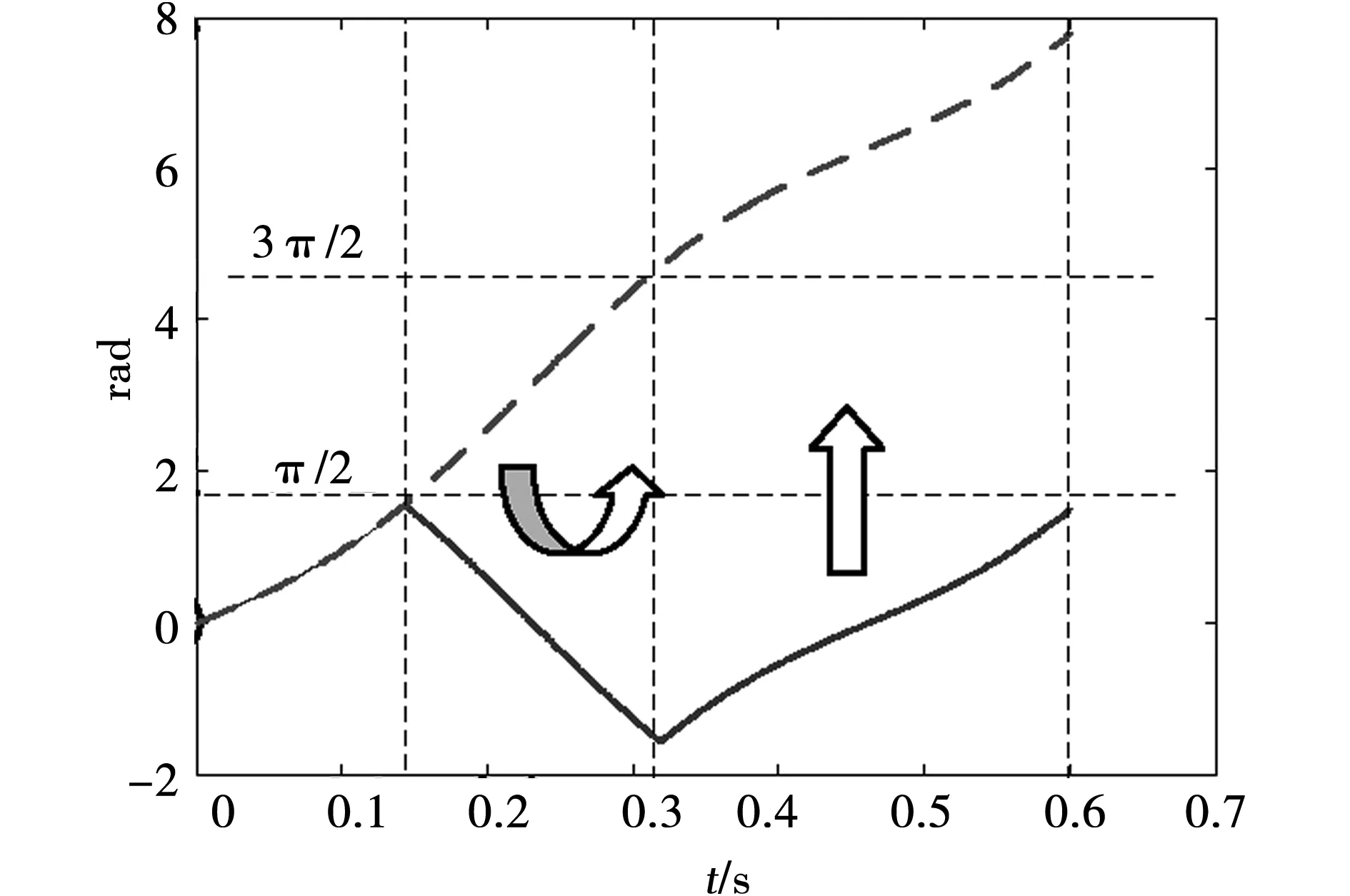
圖2 偏心軸位置角轉化Fig.2 Eccentric shaft Angle conversion
(2)
式中:tpi、tbj分別為結晶器位移曲線第i次和第j次到達波峰和波谷的時間;i∈N+、j∈N+、k∈N,xp=3sin(θ+2πζ),k的初始值為0,當|xp|=3,k值累加1。
根據上述說明,由結晶器的位移輸出xp和偏心軸的角位移θ之間一一對應的映射關系,可將式(1)轉化為式(3)所示的結晶器振動位移系統等價數學模型。
(3)
式中:ud、uq為定子電壓d、q軸分量;id、iq分別為定子電流d、q軸分量;L為定子繞組等效電感;ψf為轉子永磁體磁鏈;Rs為定子電阻;p為極對數;J為轉子轉動慣量;B為粘性摩擦系數;TL為負載轉矩;ω為轉子的角速度;θ為轉子角度;d為減速器齒輪間隙和偏心軸機械零位偏移存在的復合干擾。
2 伺服電機驅動的連鑄結晶器振動位移系統控制器設計
2.1 干擾觀測器設計

通過設計NDO來逼近估計復合干擾d
(4)

(5)
(6)
在假設1下,有
(7)
進而可得
(8)

(9)
(10)
選擇p(θ)=a1θ,a1為大于零的常數。
同理,針對式(3)中存在的負載擾動設計如下NDO:
(11)

(12)
選擇q(n)=a2n,其中a2為大于零的常數。
通過上述證明過程,同樣能夠保證負載擾動收斂到有限范圍內。
2.2 反步滑模控制器設計
伺服電機驅動的連鑄結晶器振動位移系統包括位置環、速度環和電流環,本節將分別完成各回路控制器的設計。
1)定義角位移跟蹤誤差
e1=θr-θ,
(13)
選取e1的動態滑模面為
(14)
式中c1>0。
對s1求導,有
(15)
為了提高系統在趨近階段的收斂速度,選取指數趨近律
(16)
式中:ε1>0,k1>0。
將nr=n作為反步控制量,且nr可設計為
(17)
定義Lyapunov函數
(18)
對V1求導,并結合式(15)、式(16)和式(17)可得
(19)
2)定義轉速跟蹤誤差
e2=nr-n。
(20)
選取e2的動態滑模面:
(21)
式中c2>0。
對s2求導可得
(22)
同樣,為了改善滑模面趨近過程的動態品質,取指數趨近律為
(23)
式中:ε2>0,k2>0。
將iqr=iq作為反步控制量,將iqr設計為
(24)
定義Lyapunov函數為
(25)
對V2求導,并結合式(22)、式(23)和式(24)可得:

s2(-ε2sgn(s2)-k2s2)=
(26)
3)為了實現PMSM的完全解耦,采用磁場定向的id=0矢量控制方法,選取q軸控制電流如式(24)所示,d軸控制電流idr=0,并記PMSM電流跟蹤誤差為
(27)
對上式求導可得:
(28)
基于上述分析設計,可以歸納得到如下結論:
定理1對于如式(3)所示的伺服電機驅動的連鑄結晶器振動位移系統,選取滑模面式(14)、式(21),設計反步控制律式(17)、式(24)、式(31)和式(32),則系統是漸近穩定的。
證明:針對如式(3)所示的系統,定義Lyapunov函數為
(29)
對上式求導,并結合式(28)可得
(30)
將電流環控制器設計為:
(31)
(32)
式中:k3>0,k4>0。
將式(31)和式(32)代入式(30)可得
(33)
由式(33)可知,所設計的控制器式(31)和式(32)能夠保證整個系統漸近穩定。
3 仿真研究
為了驗證所設計連鑄結晶器振動位移系統反步滑模控制器的有效性,對其進行了仿真研究。伺服電機驅動的連鑄結晶器振動系統結構框圖如圖3所示。
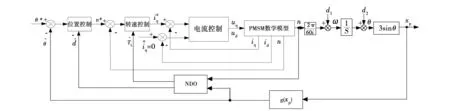
圖3 伺服電機驅動的連鑄結晶器振動系統整體結構框圖Fig.3 Overall structure diagram of system of oscillation platform of continuous casting mold driven by servo motor
伺服電機的標稱參數取為:PN=20.4 kW,nN=1 500 r/min,IN=45 A,Rs=0.14 Ω,L=4.6 mH,p=3,B=0.004,J=0.054 7 kg·m2,ψf=0.96 Wb。
所設計的反步滑模控制器參數取為:c1=130,c2=70,ε1=0.05,ε2=0.01,k1=15,k2=10,k3=150,k4=180,NDO觀測器設置參數為:a1=1 000,a2=300。
仿真中采用期望的結晶器位移波形為德馬克非正弦波形,其具體形式如下所示
xpr=hsin(ωt-Asin(ωt))。
仿真結果如圖4~圖8所示。
1)當位移給定為非正弦信號時:
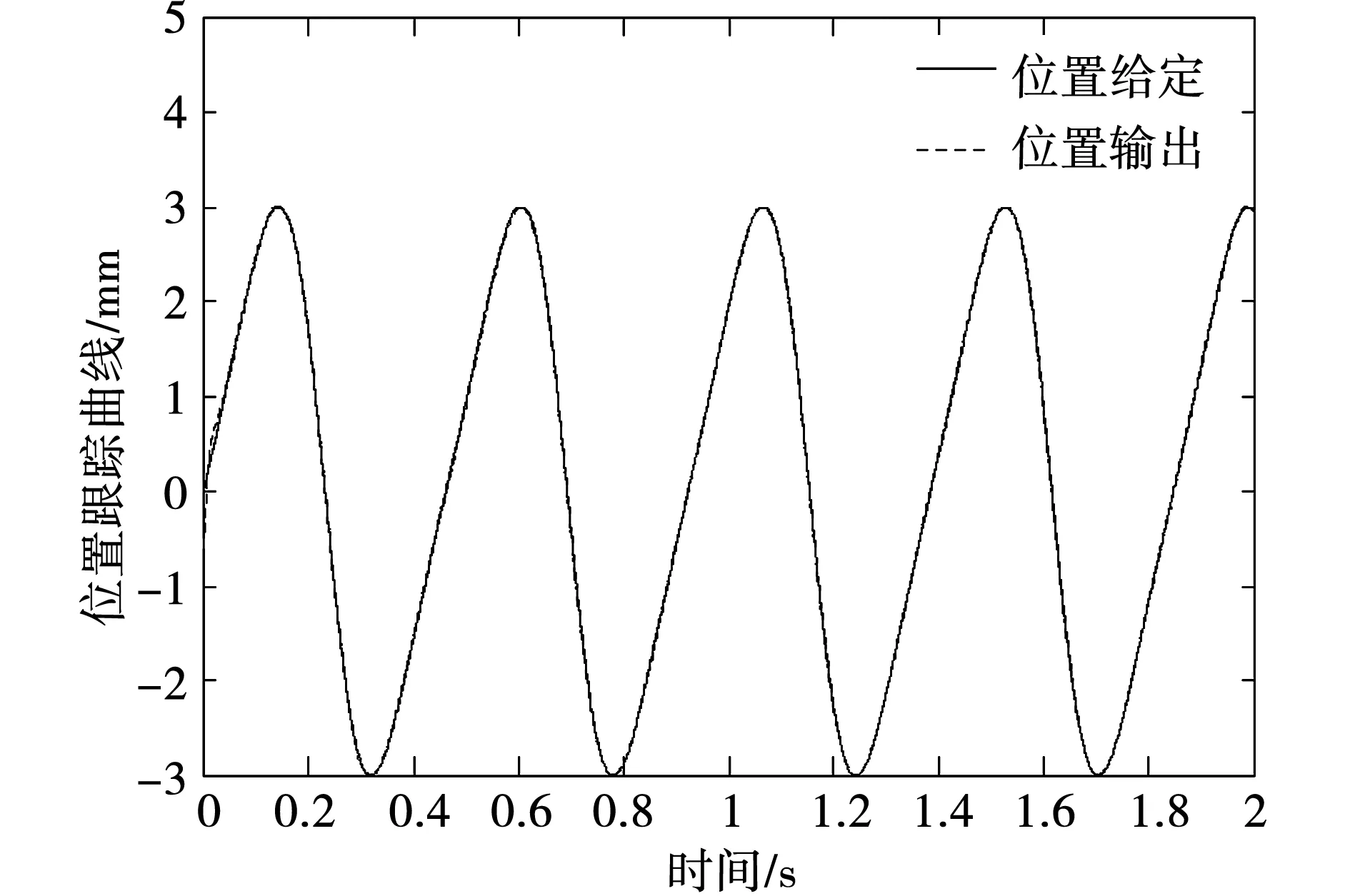
圖4 結晶器位移跟蹤曲線Fig.4 Displacement tracking curve of mold
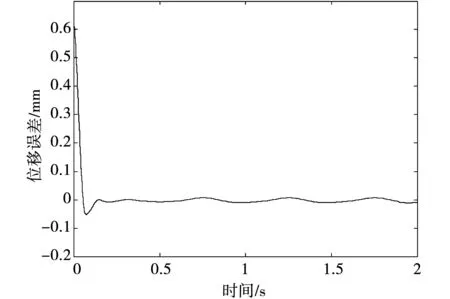
圖5 結晶器位移誤差曲線Fig.5 Displacement error curve of mold
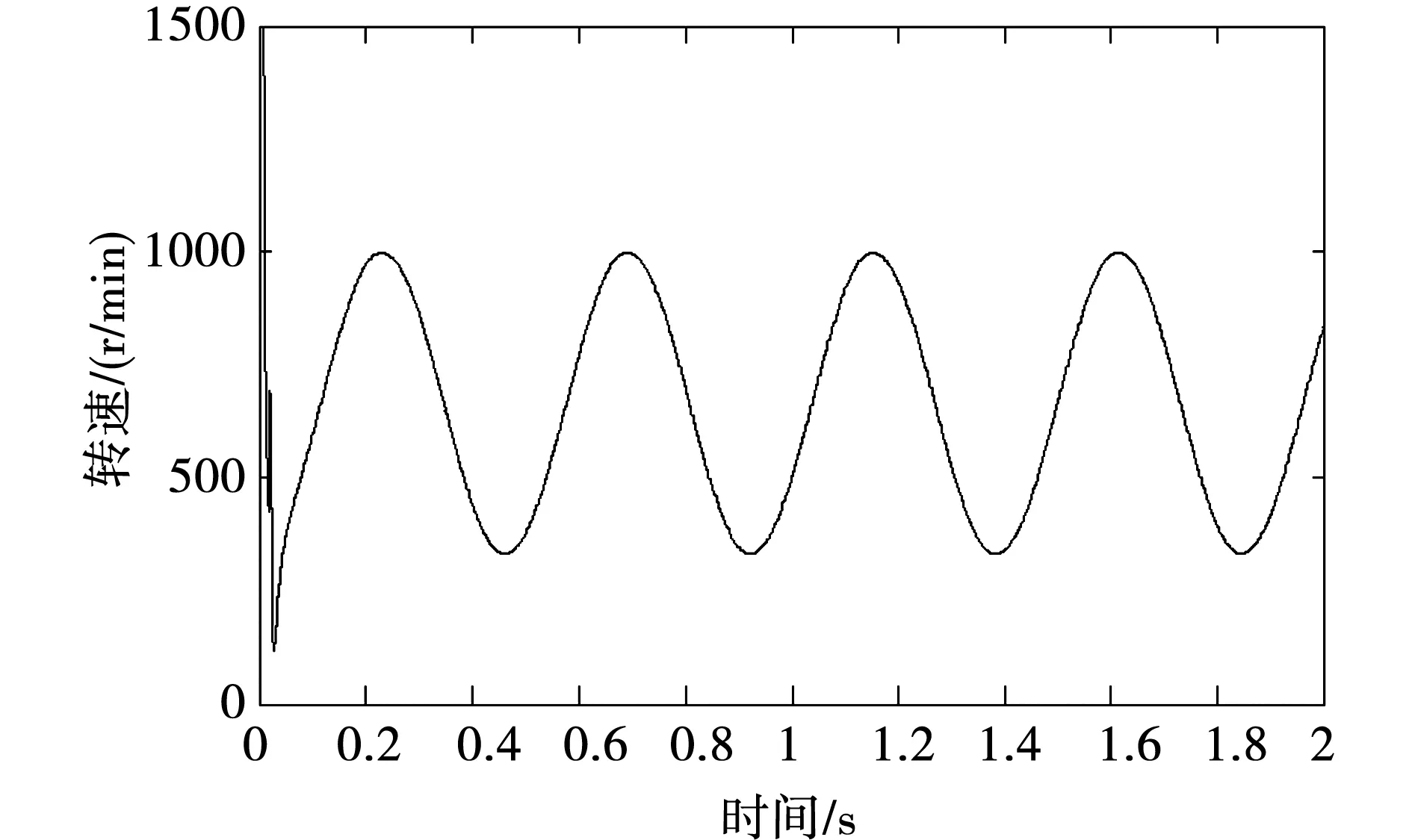
圖6 電機轉速曲線Fig.6 Motor speed curve
2)當位移給定為正弦信號時:
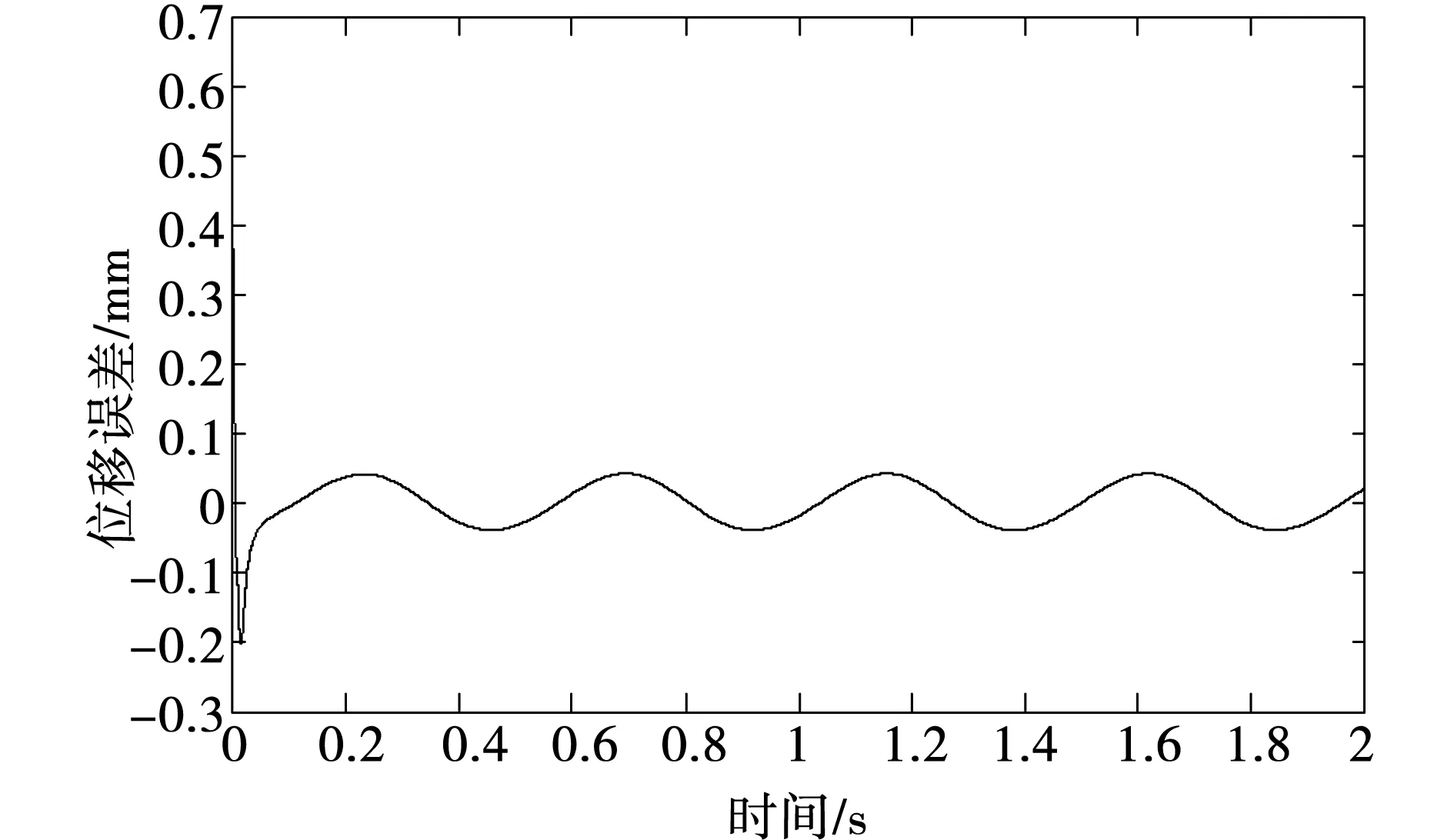
圖8 結晶器位移誤差曲線Fig.8 Displacement error curve of mold
由圖4、圖5和圖7、圖8可知,當系統給定為正弦或非正弦信號時,在系統存在減速器齒輪間隙和偏心軸機械零位偏移綜合擾動的情況下,所設計的反步滑模控制器能夠較好的實現結晶器位移輸出對給定位移的漸近跟蹤,抑制復合擾動造成的結晶器位移變化的能力更強。
圖6、圖9分別為給定信號不同情況下的伺服電機轉速曲線。可以看出,電機的轉速變化平穩,滿足單方向、變角速度轉動的要求。
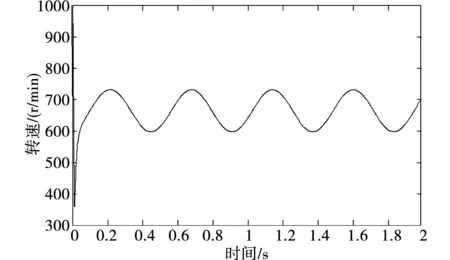
圖9 電機轉速曲線Fig.9 Motor speed curve
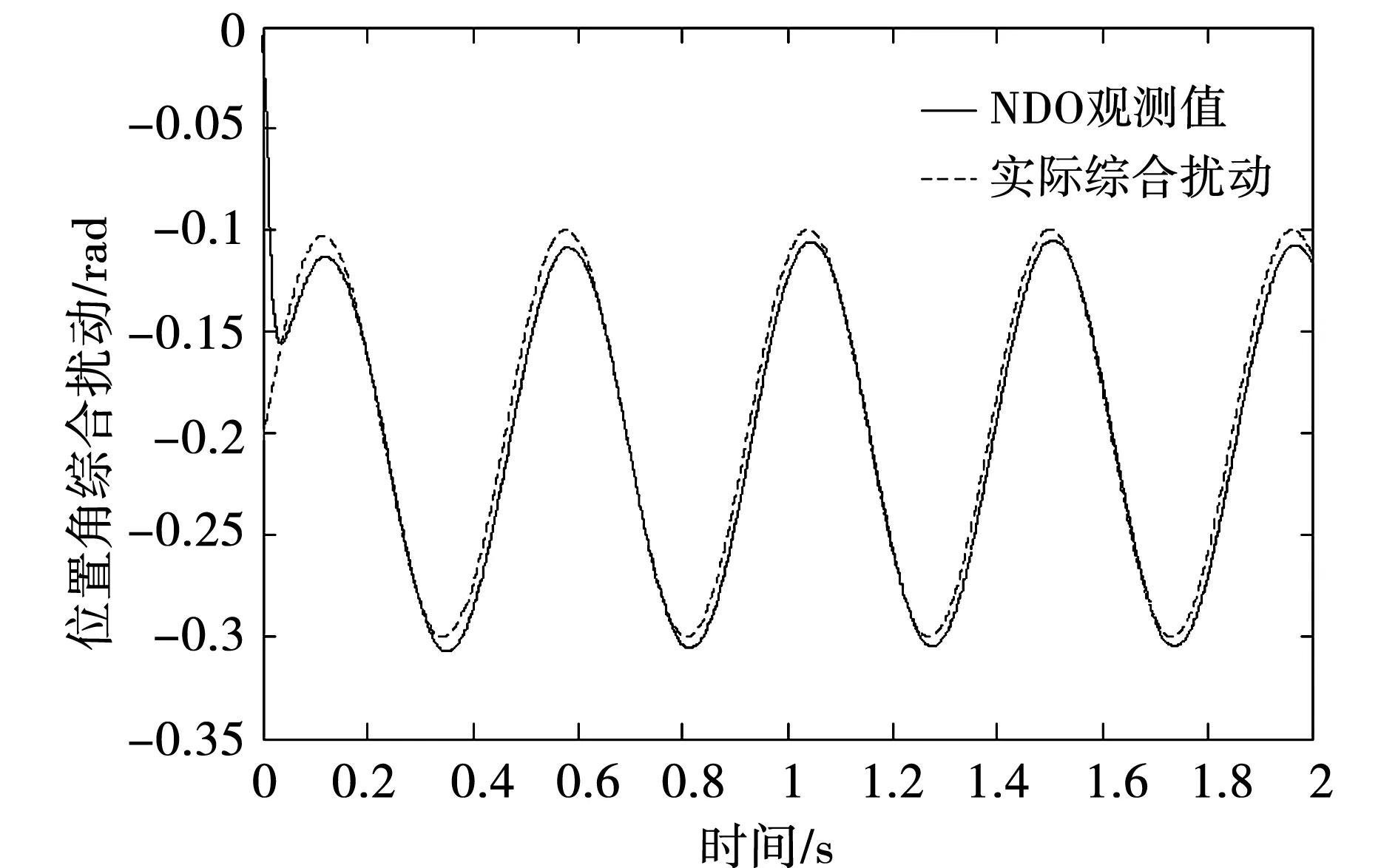
圖10 綜合擾動觀測曲線Fig.10 Comprehensive disturbance observation curve
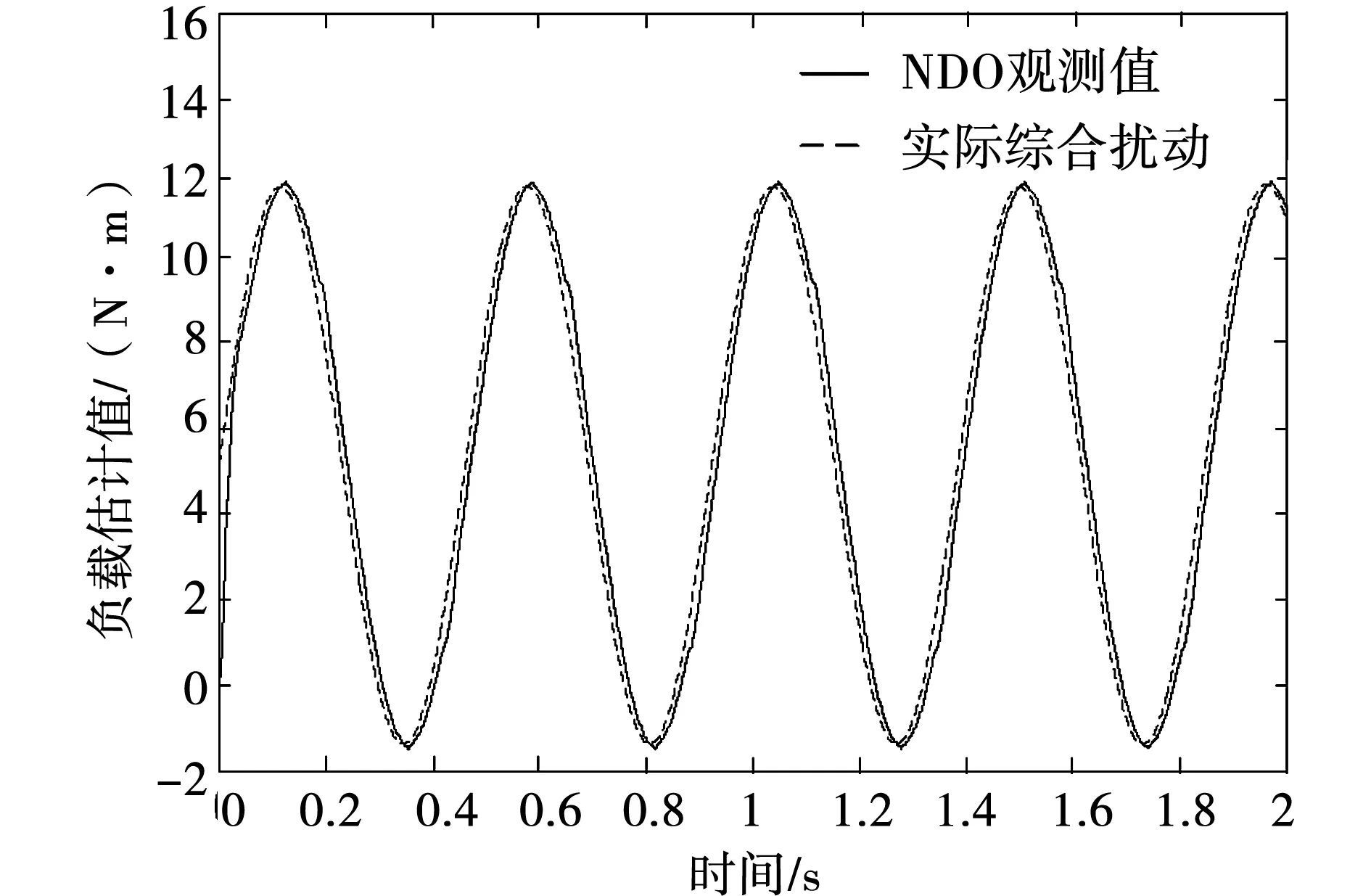
圖11 負載TL觀測曲線Fig.11 Observation curve of load TL
由圖10和圖11可以看出,所設計的干擾觀測器能夠很好的實現對系統綜合擾動和負載轉矩的觀測估計,針對擾動的變化,能夠有效地提高了系統的控制精確度。
3 結 論
本文針對伺服電機驅動的連鑄結晶器振動位移系統中存在的減速器齒輪間隙和偏心軸機械零位偏移擾動問題,提出了一種基于干擾觀測器的伺服電機驅動連鑄結晶器振動位移系統反步滑模控制方法。該方法有效地提高了系統狀態的收斂速度,削弱了復合擾動對控制系統性能的影響,增強了系統的魯棒性。最后的仿真結果表明,所設計的NDO能夠快速、準確地觀測出復合干擾,設計的控制器能夠保證結晶器位移的準確跟蹤。
[1] 林瑞全,黃韜,張濤.一種內置式永磁同步電機復合轉速估計方法[J].哈爾濱理工大學學報,2012,29(3): 84-90. LIN Ruiquan,HANG Tao,ZHANG Tao.A built-in composite permanent magnet synchronous motor speed estimation method [J].Journal of Harbin institute of technology university,2012,29(3): 84-90.
[2] 方一鳴,李宮胤,李建雄,等.伺服電機驅動連鑄結晶器振動系統建模與分析[J].儀器儀表學報,2014,35(11): 2615-2623. FANG Yiming,LI Gongyin,LI Jianxiong,et al.The model and analysis for displacement system of the continuous casting mold driven by servo motor[J].Chinese Journal of Scientific Instrument,2014,35(11): 2615-2623.
[3] 亢克松,方一鳴,夏天,等.伺服電機驅動的連鑄結晶器振動位移系統模糊自整定PID控制[J].燕山大學學報,2015,39(4): 334-340. KANG Kesong,FANG Yiming,XIA Tian,et al.The fuzzy self-tuning PID control for displacement system of the continuous casting mold driven by servo motor[J].Journal of yanshan university,2015,39(4): 334-340.
[4] 方一鳴,李智,吳洋羊,等.基于終端滑模負載觀測器的永磁同步電機位置系統反步控制[J].電機與控制學報,2014,18(9): 105-111. FANG Yiming,LI Zhi,WU Yangyang,et al.Backstepping control of permanent magnet synchronous motor position system based on the load terminal sliding mode observer[J].Electric Machines and Control,2014,18(9): 105-111.
[5] CHEN W H.A nonlinear disturbance observer for robotic manipulators[J].IEEE Transactions on Industrial Electronics,2000,47(4): 932-938.
[6] 張元濤,石為人,邱明伯.基于非線性干擾觀測器的減搖鰭滑模反演控制[J].控制與決策,2010,25(8): 1255-1260. ZHANG Yuantao,SHI Weiren,QIU Mingbo.Backstepping sliding mode control for anti-rolling fin based on the nonlinear disturbance observer[J].Control and decision ,2010,25(8): 1255-1260.
[7] EBRAHIM A,MURPHY G.Adaptive backstepping control of an induction motor under time-varying load torque androtor resistance uncertainty[J].Int J of Automation and Control,2008,2(4): 401-417.
[8] OZBAY U,ZERQEROQLU E,SIVRIOQLU S.Adaptive backstepping control of variable speed wind turbines[J].Int J of Control,2008,81(6): 910-919.
[9] 牟麗君,高存臣,李娟.一類受擾時滯離散系統的滑模跟蹤控制[J].控制與決策,2008,23(8): 874-878. MU Lijun,GAO Cunchen,LI Juan.The sliding mode tracking control of a class of linear discrete system with disturbancer[J].Control and decision,2008,23(8): 874-878.
[10] CAPISANI L M,FERRARA A,MAQNANI L.Design and experimental validation of a second-order sliding-mode motion controller for robot manipulators[J].Int J of Control,2009,82(2): 365-377.
[11〗 莊開宇,張克勤,蘇宏業,等.高階非線性系統的Terminal滑模控制[J].浙江大學學報(工學版),2002,36(5): 482-485. ZHANG Kaiyu,ZHANG Keqin,SU Hongye,et al.High order nonlinear system of Terminal sliding mode control[J].Journal of zhejiang university (engineering science),2002,36(5): 482-485.
[12] 郭亞軍,王曉鋒,馬大為,等.自適應反演滑模控制在火箭炮交流伺服系統中的應用[J].兵工學報,2011,32(4): 493-497. GUO Yajun,WANG Xiaofeng,MA Dawei,et al.Adaptive inversion sliding mode control in rocket launcher application of ac servo system[J].ACTA ARMAMENTARII,2011,32(4): 493-497.
[13] 夏天,亢克松,方一鳴,等.伺服電機驅動的連鑄結晶器振動位移系統非線性處理及控制[C]//第三十四屆中國控制會議,杭州,2015: 4443-4448.
[14] LI Qiang,FANG Yiming,KANG Kesong,et al.Extended state observer based nonsingular terminal sliding mode control for non-sinusoidal oscillation of continuous casting mold driven by servo motor[C]//In: Proceeding of the 34th Chinese Control Conference,Hangzhou,China,2015,1043-1048.
(編輯:賈志超)
Sliding-mode control of continuous cast Mold oscillation displacement system driven by servo motor
LIU Le1, LI Zhi1, FANG Yi-ming1,2, LI Jian-xiong1
(1.Key Lab of Industrial Computer Control Engineering of Hebei Province,Yanshan University,Qinhuangdao 066004,China;2.National Engineering Research Center for Equipment and Technology of Cold Strip Rolling,Qinhuangdao 066004,China)
Aiming at the problems of reducer gear clearance and the deviation of the eccentric shaft mechanical zero offset,which exist in displacement system of the continuous casting mold driven by servo motor,a backstepping sliding mode controller based on disturbance observer is designed.Firstly,For the reducer gear clearance and eccentric shaft mechanical zero offset disturbance uncertainties and load disturbances,disturbance observer was adopted to approximatly estimate the compound disturbance.The observation error in finite time convergence,and the observed value dynamic compensation to the controller,it can improve the control precision of the system was improved.Secondly,using backstepping method to design the displacement system dynamic sliding mode controller,which improves the convergence rate of the system state,and enhances the robustness of the system.The simulation results show that observer estimate the system interference and load torque quickly and accurately,and the displacement control system can track the given signal.
servo motor; continuous casting mold; disturbance observer; backstepping control; sliding mode control
2016-01-16
國家自然科學基金委員會與寶鋼集團有限公司聯合資助重點項目(U1260203);國家自然科學基金(61403332);河北省博士后科研項目擇優資助(B2016003017);河北省高等學校創新團隊領軍人才培育計劃(LJRC013)
劉 樂(1985—),男,博士,講師,研究方向為冷帶軋機速度張力及壓下系統的解耦協調控制; 李 智(1988—),男,碩士研究生,研究方向為永磁同步電機的控制與研究; 方一鳴(1965—),男,博士,教授,博士生導師,研究方向為自適應魯棒控制理論與應用、冶金自動化等; 李建雄(1980—),男,博士,副教授,研究方向為自適應魯棒控制及理論應用。
方一鳴
10.15938/j.emc.2016.12.013
TP 273
:A
:1007-449X(2016)12-0101-08
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16