基于位置信息融合的無人機戰場通信態勢感知方法*
2017-01-11 03:34:39袁西超
艦船電子工程 2016年12期
關鍵詞:信號
袁西超 何 輝 楊 儉
(中國人民解放軍電子工程學院 合肥 230037)
基于位置信息融合的無人機戰場通信態勢感知方法*
袁西超 何 輝 楊 儉
(中國人民解放軍電子工程學院 合肥 230037)
論文設計并驗證了基于位置信息融合的無人機戰場通信態勢感知方法,通過無人機在任務區域搜索時位置改變引起的信號強度的變化,反向推算出電臺的位置,并且采用了幾種手段有效減弱了噪聲的影響,使得在信噪比較低的情況下仍能達到戰場通信態勢的精度需求,最后利用仿真驗證了其有效性。
戰場通信態勢; 態勢感知; 無人機; 位置信息融合
(Electronic Engineering Institute of PLA, Hefei 230037)
Class Number TN914
1 引言
本文中的戰場通信態勢是戰場通信對抗電磁態勢[1]的子集,主要關注敵方通信電臺的數量、工作頻率、位置分布的狀態以及在空間域、時間域、頻率域上的活動趨勢[2]。戰場通信態勢感知是指通過某種手段快速搜索戰場,獲取相關要素信息并處理形成戰場通信態勢情報[3]。根據戰場通信態勢情報,可以輔助分析敵方力量編成、部署以及行動企圖,可以輔助評估作戰效果,可以引導通信偵察干擾行動,具有十分重要的意義[4]。在高技術戰爭條件下,戰場上通信電臺數量龐大、信號復雜、變化快速,傳統的用于搜索截獲、分析識別、測向定位的通信偵察手段難以適應未來戰場通信態勢感知的需求。本文提出的基于位置信息融合的無人機戰場通信態勢感知方法具有頻段寬、速度快、自動化、適應能力強的優點,充分發揮電子戰無人機的優勢[5],能夠生成快速更新的戰場通信態勢情報,可有效對接文獻[6~7]描述的戰場電磁態勢感知體系。
2 方法概述
2.1 基本思想
無人機接收敵方電臺的通信信號經過地—空傳播路徑,接近自由空間傳播,偵察接收機輸入端功率為
(1)式(1)中,Pr為偵察接收機輸入端功率,Pt為發射功率,Gt發射天線在接收機方向增益,Gr接收天線在發射機方向增益,λ為信號波長,d為接收機與發射機的距離。從式(1)可以看出,Pr與d的平方成反比。由于無人機空中飛行,使得無人機與電臺相對位置不斷變化,導致d和Pr跟隨變化。如果記錄下無人機飛行位置與對應的Pr,則有可能根據式(1)反推出電臺位置。
2.2 影響因素分析
實際上每個飛行位置對應的Pr不僅與d有關,還受到多種因素的影響。根據式(1)分析如下:Pt不是恒定值,而是受信息源變化影響;Gt與Gr受無人機與電臺相對方位的變化影響;λ受信號頻率影響;電臺與無人機間的傳播路徑也不一定嚴格遵守自由空間傳播,可能受地形地貌的遮擋和多徑衰落影響;Pr的測量值還受到同時接收的背景噪聲影響。
通過準確分析各項因素的影響,并采用合理手段進行消除或限制,是研究基于位置信息融合的無人機戰場通信態勢感知方法的基礎。信息源變化因素,雖然其瞬時值變化較大,但其短時間的平均值變化較小。天線增益因素,假設天線均采用豎直全向天線,則天線增益不隨方向改變,即使天線采用垂直極化定向天線,在天線主瓣方向內,也可近似認為天線增益不變。信號頻率因素,由于以頻率區分信號,因此信號存在則說明頻率不變。傳播路徑因素和背景噪聲因素難以預測,但其一般具有突發性,可以通過數學手段減弱其影響。因此,d以外的其他影響因素都可以在一定程度上有效限制或消除。
2.3 設備需求
為實現基于位置信息融合的無人機戰場通信態勢感知方法,通信對抗無人機系統應具備以下功能:
1) 偵察天線是豎直全向天線,或垂直極化定向天線。
2) 偵察接收機能夠對信號放大、變頻、采樣變為信號數據。
3) 數據鏈設備能夠實時將信號數據傳輸至地面控制站。
4) 地面控制站計算機能夠流暢運行實現本方法的軟件。
2.4 基于位置信息融合的無人機戰場通信態勢感知過程
1) 無人機起飛并前往任務區域。
2) 無人機按照任務航線規劃在任務區域內搜索飛行。
3) 偵察接收機將任務頻段內的信號變為信號數據,并實時傳輸至地面。
4) 地面控制站計算機運行實現本方法的軟件,實時計算并標示電臺的位置和頻率信息。
5) 無人機將任務區域搜索一遍則同步刷新一遍任務區域的戰場通信態勢。
3 方法設計
3.1 基于無人機位置和信號頻譜功率的電臺位置求解
信號頻譜功率是指將偵察接收機采集并傳回地面的信號數據進行快速傅里葉變換,然后將信號頻譜峰值附近譜線求和,用以表示接收信號功率。顯然,信號頻譜功率是一部分接收信號功率加上信號頻帶內的背景噪聲功率。根據式(1)可得:
(2)
(3)
d2=(xuav-x)2+(yuav-y)2+H2
(4)
式(2)由式(3)、式(4)補充說明,p為信號頻譜功率,σ為占接收信號功率的比例,ρ為傳播路徑因素的影響,根據影響因素分析,可將除d以外的其他因素歸并為W,由此產生的誤差通過后面的數學手段消除,(xuav,yuav)、(x,y)分別是無人機和電臺的位置(直角坐標系表示),H為無人機相對電臺的飛行高度。
無人機在任務區域搜索時不斷采集電臺信號并形成信號數據,每次信號數據和采集時的無人機位置都可以列出如式(2)所示的方程。由于只有x、y、W等三個未知數,因此可以任意抽出三個方程組成方程組求解,如式(5)所示。
(5)
式(5)中,三個方程里面的W實際并不相等,但差值不大,在此認為相等,因為無法準確計算它們的值。這樣,就造成了解存在誤差,多個解在一起就會表現出散點,需要進一步用數學手段找出最優解。方程組的解如式(6)所示。
(6)
a=K2+1
(7)
b= 2KB-K[2x1+P(-2x1+2x2)]
-[2y1+P(-2y1+2y2)]
(8)
(9)
(10)
(11)
(12)
式(6)由式(7)~式(12)補充說明。
3.2 經緯度坐標與直角坐標的轉化
由于無人機和電臺的位置一般用經緯度表示,而解方程組用直角坐標比較方便,因此應當進行經緯度坐標和平面直角坐標的變換。由于需要解方程組的區域范圍不大,地球曲面可在小范圍內近似為平面,因此可選擇附近一點為坐標原點,利用經緯度距離換算公式求得無人機位置與原點位置的距離和方位,再通過三角函數換算為直角坐標。同理,最終的電臺位置也可反向換算為經緯度坐標。
3.3 信號自動判決門限的設定
實際信號中信號強度和噪聲強度都在不斷變化,判決信號存在與否的門限也應當跟隨變化,稱為信號自動判決門限。信號自動判決門限由信號數據頻譜的均值和方差來表示,如式(13)所示。
J=mean(F)+k*var(F)
(13)
式中,J為判決門限,F為信號數據經快速傅里葉變換后頻譜的模,其長度為信號數據長度的1/2,mean(F)是F的均值,var(F)是F的方差,k為系數,可根據信號和噪聲情況人工調整。
3.4 信號頻譜功率曲線的生成
信號頻譜功率曲線是指信號頻譜功率隨采集次數變化的曲線,表示不同無人機位置的不同信號強度。生成信號頻譜功率曲線包括四步:
1) 根據信號自動判決門限,判決信號存在,并求出信號頻帶。
2) 在信號頻帶內求出峰值頻率,作為信號中心頻率。
3) 將中心頻率左右Δf內的譜線求和,作為信號頻譜功率。
4) 按每次采集并處理得到的信號頻譜功率畫出信號頻譜功率曲線。
其中,Δf可根據信號帶寬情況人工調整。
3.5 信號頻譜功率曲線的平滑
由于噪聲的影響,每次采集并處理得到的信號頻譜功率都存在誤差,表現為信號頻譜功率曲線在一定程度(與信噪比相關)內忽高忽低,嚴重影響方程組求解的準確性,因此應利用噪聲的隨機特性對信號頻譜功率曲線平滑處理,減弱噪聲的干擾。具體方法是將各次采集點的信號頻譜功率變為其前后m次采集點信號頻譜功率的均值,m可根據信號情況和求解情況人工調整。
3.6 電臺位置解集的生成
求解電臺位置解包括三步:
1) 挑選采集點。在信號功率頻譜曲線中,較大的值能更好反映信號強度,因此挑選的方法是從大到小依次選出3*n個采集點。
2) 組成方程組。將選出的采集點的對應的無人機位置和信號頻譜功率,組成n個方程組。
3) 方程組求解。根據式(6)求出n個方程組的解。
3.7 電臺鏡像位置的消除方法
從式(6)可以看出,每個方程組都有2套解,其中1套解表示了電臺的位置,另1套解是電臺位置相對無人機位置的鏡像位置,應予以消除。
根據方程組求解的原理,畫出圖1、圖2、圖3,圖中有向線段表示無人機航線,實心五角星表示電臺位置,空心五角星表示電臺鏡像位置,黑方塊表示采集點,圓圈的半徑表示方程組求解過程中得到的無人機與電臺的距離。由圖1看出,無人機直線飛行時難以分辨鏡像位置。從圖2、圖3看出,無人機弧形航線飛行時,無論電臺在內側還是外側,鏡像位置的點都比較散,因此可以利用這一特征將鏡像位置識別并消除。

圖1 直線航線
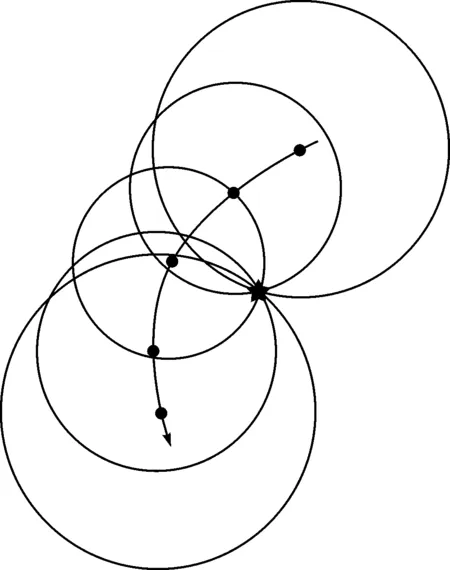
圖2 弧形航線內側
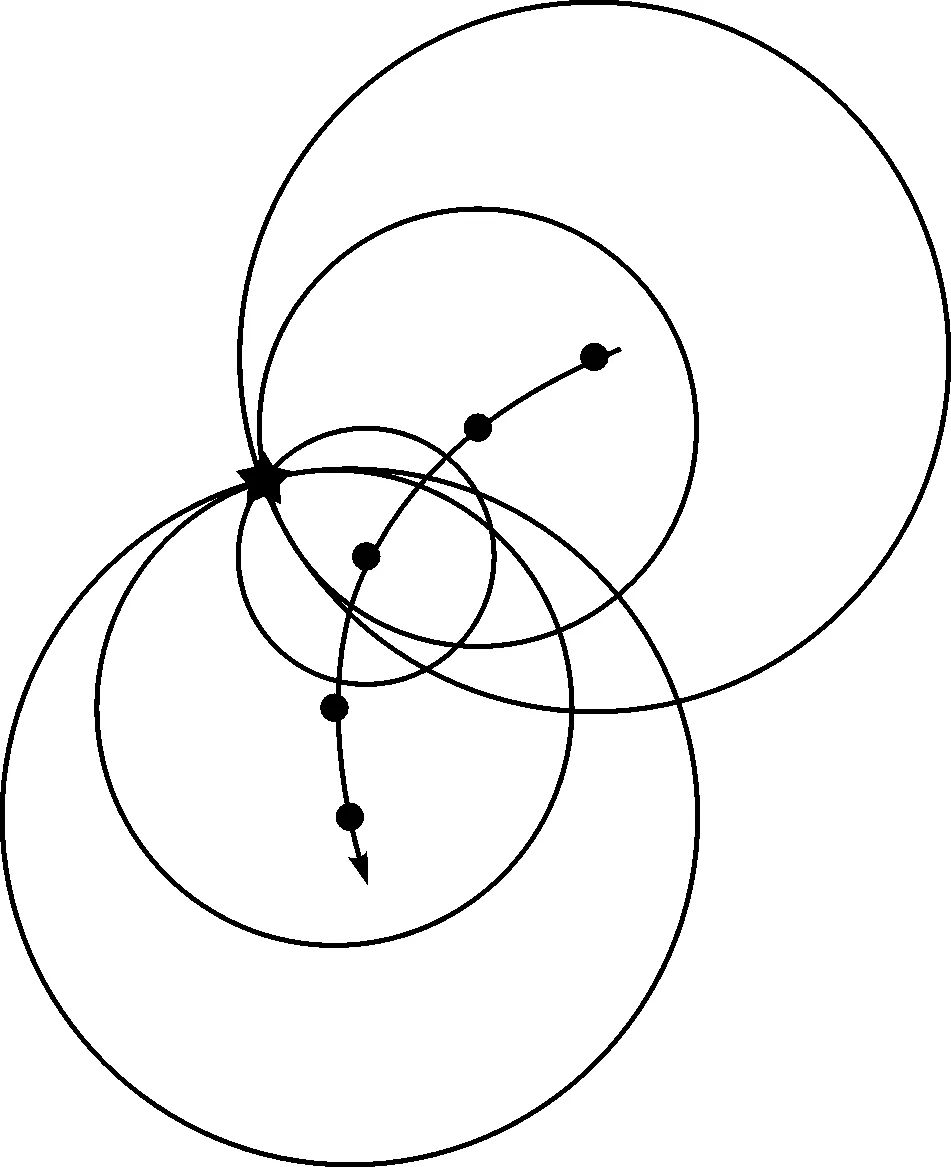
圖3 弧形航線外側
3.8 電臺位置解集的優化
由于噪聲的影響,n個方程組的解不在同一位置,而是出現散點,為進一步減弱噪聲的干擾,可去掉較為分散的點,方法包括三步:
1) 計算n個解表示的點之間的距離。
2) 計算每個點到其他點之間距離的總和。
3) 按照每個點的距離總和由小到大排序,舍棄后q%的點。
其中,q可以根據解的情況人工調整。
3.9 最優電臺位置估計
優化后的解集是較為集中的散點,而最終解必須是1個點,因此采用求重心的方法估計出最優電臺位置。具體方法是分別求x坐標和y坐標的均值。
4 仿真驗證
4.1 仿真條件
任務區域范圍為200km×200km,設置兩部電臺分別在(100,40)、(120,80),電臺信號中心頻率分別為70MHz、80MHz,均為BPSK調制,信息碼速率為100KHz,采樣頻率為200MHz,無人機沿航線飛行,相對電臺的飛行高度為3000m,仿真如圖4、圖5所示。
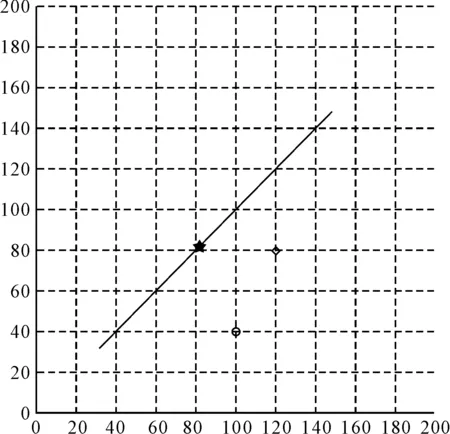
圖4 任務區域仿真圖
圖4中直線為無人機航線,航線上的“★”表示無人機當前位置,“”表示電臺位置。
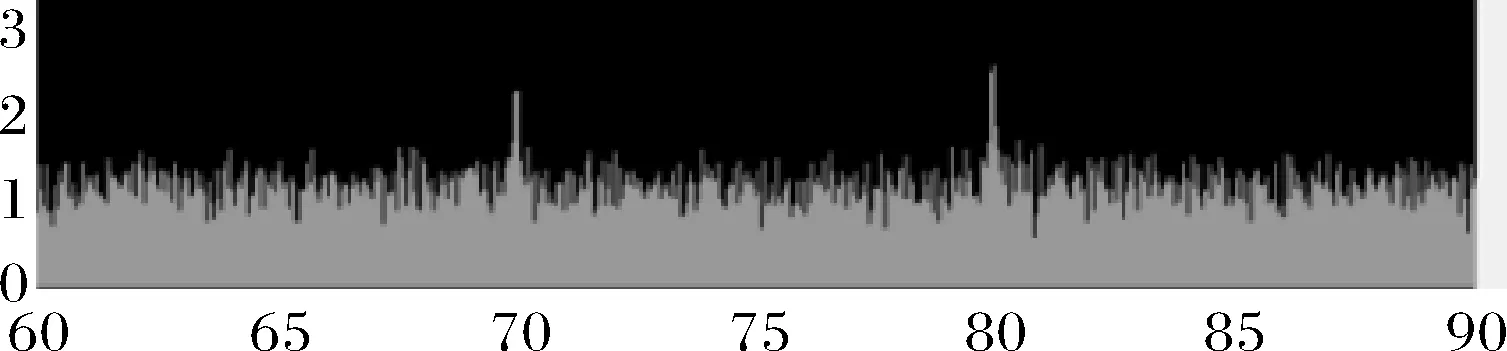
圖5 信號頻譜圖
圖5中可以看出在背景噪聲中70MHz、80MHz處的信號頻譜。
4.2 無噪聲條件下信號頻譜功率曲線與解集
下面仿真驗證式(6)求解是否正確。關掉噪聲,生成信號頻譜功率曲線如圖6所示,圖中橫坐標表示航線上的采樣點數,通過式(6)求解電臺位置如圖7所示,圖7中航線兩側的點為求解得到的電臺位置,其中1個點與電臺真實位置重合,另1個點在鏡像位置。

圖6 無噪聲條件下信號頻譜功率曲線圖

圖7 無噪聲條件下求解電臺位置
4.3 噪聲條件下信號頻譜功率曲線的平滑
下面檢驗噪聲對求解的影響,在噪聲條件下信號頻譜功率曲線如圖8所示,由其求解得到的電臺位置如圖9所示,可以看出由于噪聲影響,電臺位置變為了散點。
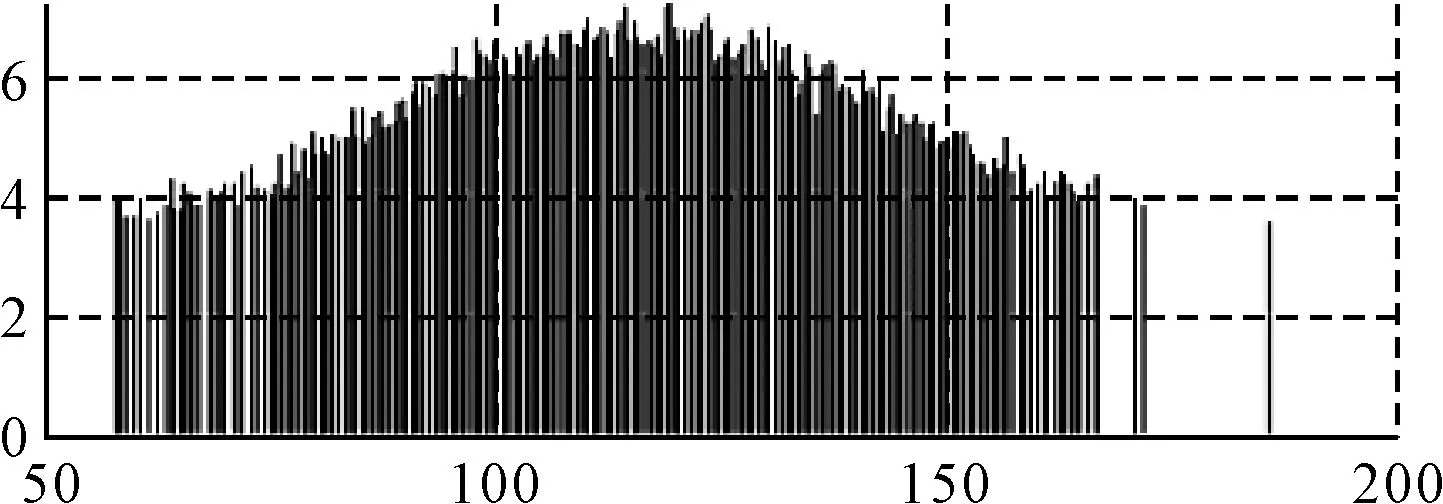
圖8 無平滑處理的信號頻譜功率曲線圖
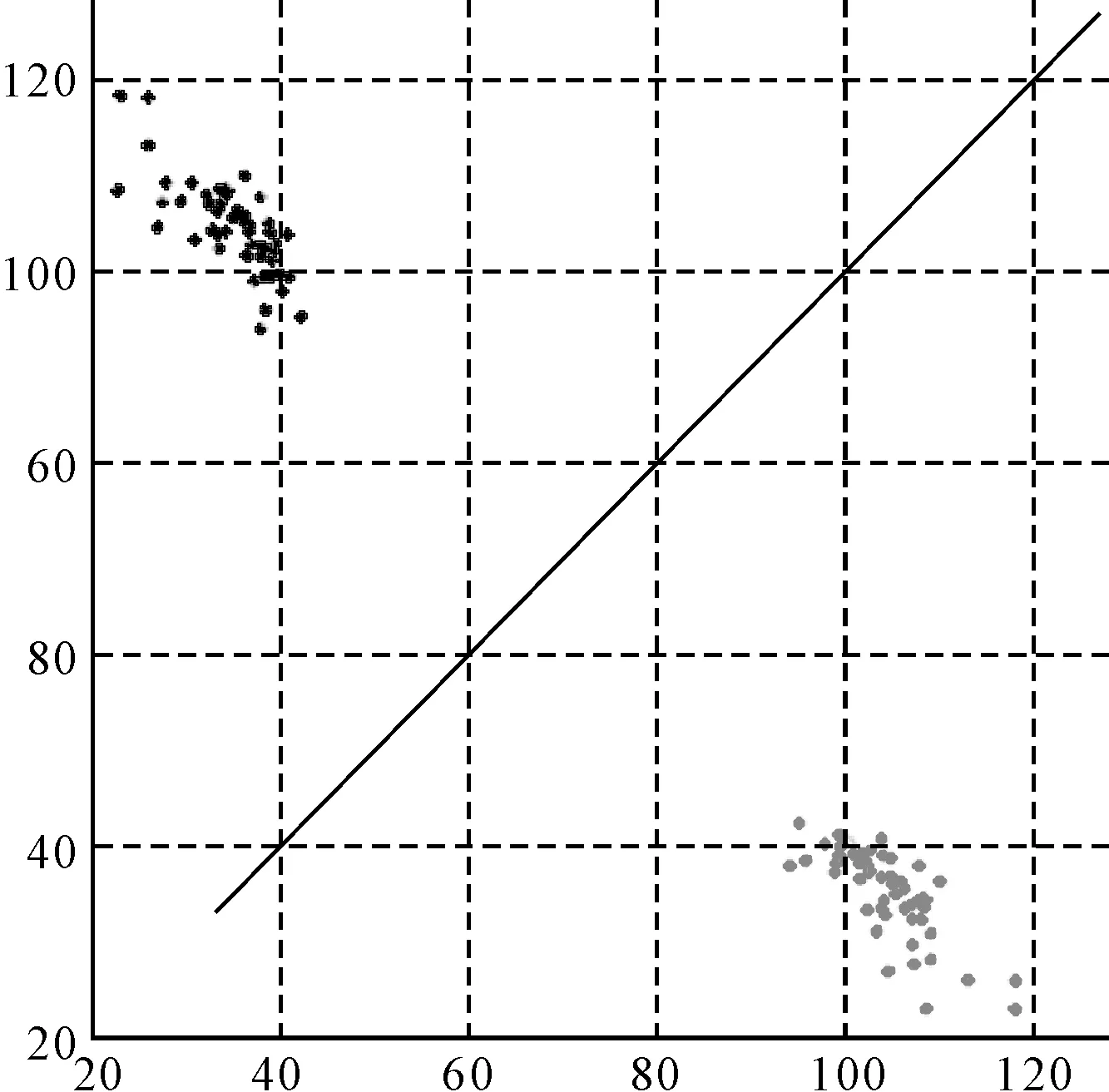
圖9 無平滑處理求解電臺位置
下面對圖8所示的信號頻譜功率曲線進行平滑處理,結果如圖10所示,由其求解得到的電臺位置如圖11所示,可以看出散點情況得到了較好收斂。
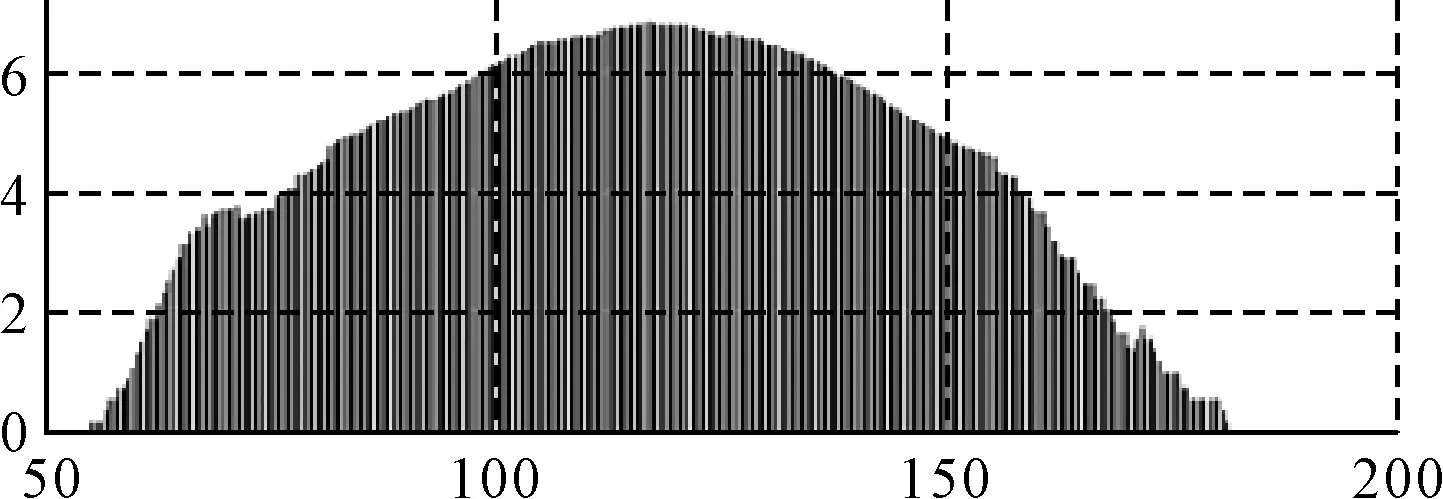
圖10 平滑處理后信號頻譜功率曲線圖
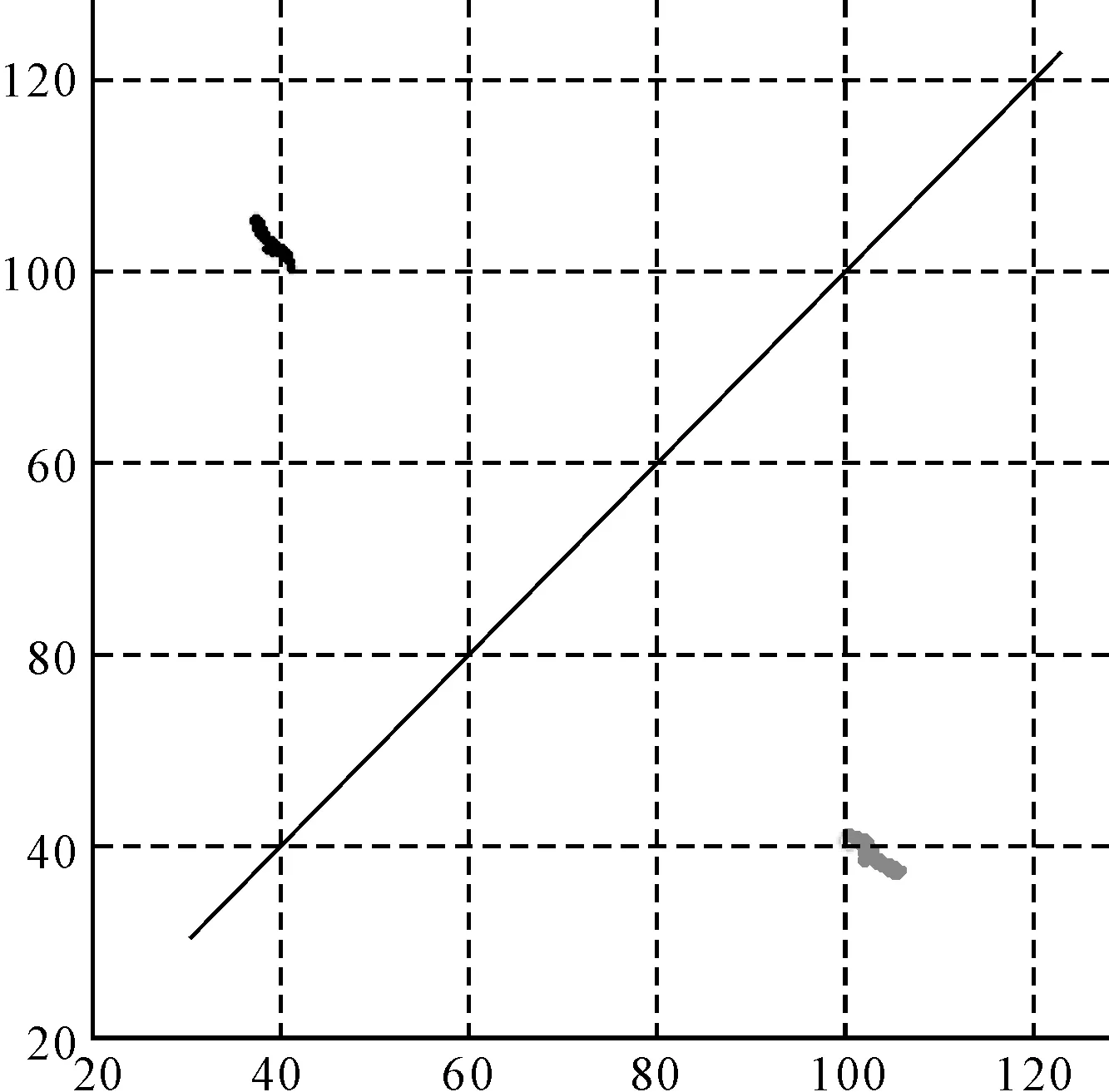
圖11 平滑處理后求解電臺位置
4.4 直線航線與弧形航線的解集對比
下面驗證通過弧形航線消除鏡像位置。當電臺位于弧形外側時,鏡像位置的散點對比如圖12所示。當電臺位于弧形內側時,鏡像位置的散點對比如圖13所示。由圖12、圖13可以看出,鏡像位置的散點均較真實位置的情況嚴重,電臺位置弧形內側時尤為明顯。
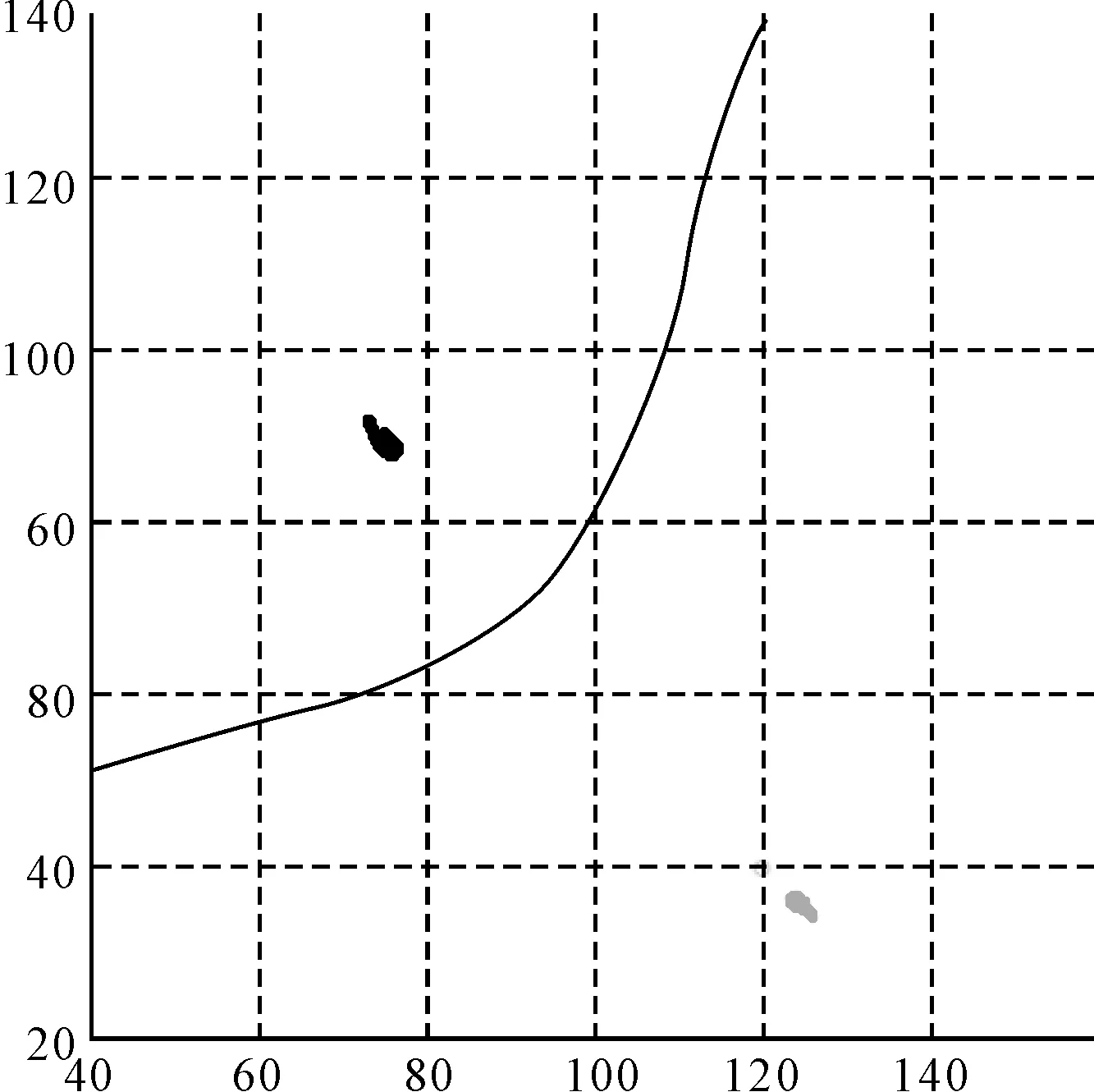
圖12 電臺在弧形外側的鏡像對比圖

圖13 電臺在弧形內側的鏡像對比圖
4.5 噪聲與弧形航線條件下的最優解與真實位置對比
下面驗證采用全部減弱噪聲影響的手段時得到的最優解位置與真實位置的偏差。在如圖14所示的信號最強時信噪比條件下,得到如圖15所示最優解與真實位置偏差。圖15中“★”號為最優解位置,其與真實位置偏差約為800m。該仿真驗證了在較低信噪比條件下基于位置信息融合的無人機戰場通信態勢感知方法得到的最優解能夠滿足戰場通信態勢標繪的精度需求。

圖14 信號最強時的頻譜圖

圖15 最優解位置與真實位置偏差
5 應用前景分析
空中測量電臺位置的手段主要有單站移動測向定位和雙站交叉測向定位,雖然定位精度較高,但均需要多通道接收機和測向天線陣,并且同時只能對1個信號測向定位,難以滿足戰場通信態勢快速更新的需求[8~11]。本文介紹的基于位置信息融合的無人機戰場通信態勢感知方法使無人機在任務區域搜索一遍就可以標出任務頻段內的所有電臺的位置,具有顯著的搜索效率,并且設備需求容易達到,能夠充分發揮無人機目標小、成本低、無人員傷亡的優勢,雖然估計的電臺位置精度不高,但用于引導通信偵察、通信干擾和分析敵方部署和行動已足夠,采用本方法快速更新的戰場通信態勢情報具有重要意義。
6 結語
本文從戰場通信態勢需求出發,設計并驗證了基于位置信息融合的無人機戰場通信態勢感知方法,從基本思想和影響因素分析入手,逐步完成了信號頻譜功率和飛行位置關系的方程組組建和求解,減弱噪聲影響的幾種手段的設計,并使用Matlab進行了仿真,驗證了方法的有效性。雖然本方法基于全向天線和常規定頻信號設計,但對使用定向天線的信號以及直接序列擴頻信號、跳頻信號也可能有效,可進一步研究。
[1] 周峰,何俊,胡振彪.仿真系統中通信對抗電磁態勢顯示研究[J].四川兵工學報,2011,32(4):77-80.
[2] 湯扣林.電磁態勢的氣象環境影響分析[J].指揮信息系統與技術,2014,5(5):20-24.
[3] 周倜,王小非,陳煒.海戰場電磁態勢感知模型[J].火力與指揮控制,2013,38(8):1-5.
[4] 康安康.一體化通信對抗威脅評估與資源分配方法研究[J].信息通信,2015(12):219.
[5] 蔣盤林.無人電子戰作戰平臺系統與技術發展研究[J].通信對抗,2008(3):3-8.
[6] 馮德俊,朱江,李方偉.戰場電磁態勢感知關鍵技術研究[J].數字通信,2013,40(5):20-23.
[7] 薛磊,沈陽,喬亞.戰場電磁態勢融合感知技術框架研究[J].指揮控制與仿真,2016,38(2):1-5.
[8] 湯扣林,劉韻,趙春東.單站測向定位技術研究[J].火力指揮與控制,2009,34(12):112-116.
[9] 韓慧珠.單站測向無源定位技術研究[D].成都:電子科技大學碩士學位論文,2014.
[10] 徐冉.無源測向定位算法研究[D].長春:長春理工大學碩士學位論文,2013.
[11] 張秋月.新型無源探測系統中的無源定位技術研究[D].哈爾濱:哈爾濱工程大學碩士學位論文,2005.
A Method of Battlefield Communication Situation Awareness by UAV Based on Position Information Fusion
YUAN Xichao HE Hui YANG Jian
The method of battlefield communication situation awareness by UAV based on position information fusion was designed and validated in the paper. The change of signal intensity was brought on the change of UAV position when UAV was searching in mission area, the method reckoned the broadcasting station position reversely, and weakened the influence of noise effectively by several artifices. The result of the method could reach the precision requirement of communication’s situation on battlefield. Finally, the availability of the method was validated by simulation.
battlefield communication situation, situation awareness, UAV, position information fusion
2016年6月12日,
2016年7月30日
袁西超,男,碩士,講師,研究方向:電子對抗無人機作戰運用、通信對抗技術、計算機仿真技術。何輝,男,碩士,講師,研究方向:通信對抗技術、電子對抗情報。楊儉,男,碩士,助教,研究方向:電子對抗無人機作戰運用、雷達對抗技術。
TN914
10.3969/j.issn.1672-9730.2016.12.012
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
