基于SEA法的水下無人航行器偵察效能評估*
2017-01-11 03:34:41何希盈林為傳
艦船電子工程 2016年12期
關鍵詞:系統
何希盈 黃 凡 朱 璟 林為傳
(1.海軍指揮學院 南京 211800)(2.海軍駐昆明地區軍事代表辦事處 昆明 650051)
基于SEA法的水下無人航行器偵察效能評估*
何希盈1黃 凡2朱 璟1林為傳1
(1.海軍指揮學院 南京 211800)(2.海軍駐昆明地區軍事代表辦事處 昆明 650051)
水下無人航行器(UUV)可以代替有人平臺執行偵察任務,其效能評估的科學性、合理性將直接影響水下無人平臺的作戰使用。基于SEA方法,根據UUV系統的特點構建了偵察效能評估指標,提出了針對UUV偵察效能的三個主要性能度量,研究了UUV偵察效能評估模型,結合具體實例對UUV系統的偵察效能進行評估。
水下無人航行器; SEA方法; 偵察效能; 性能度量
(1. Naval Command Collage, Nanjing 211800)
(2. Navy Representative Office in Kunming Area, Kunming 650051)
Class Number TN911.7
1 引言
水下無人航行器(Unmanned Underwater Vehicle,UUV)作為新型的無人水下平臺,具有尺度小、隱蔽性好、造價低、無人員傷亡等特點,適于執行對人員有高度危險的任務,延伸有人平臺的探測和作戰范圍[1~2]。使用UUV進行偵察,具有抵近隱蔽、長期持續的特點,偵察數據準確性比較強。UUV偵察主要是UUV為獲取海上軍事斗爭所需情報而采取的行動。因此,隨著海上作戰思想的不斷發展和無人水下平臺技術的成熟,UUV在水下偵察中的使用會越來越多,其效能評估特別是結合戰場環境的動態評估就顯得尤為重要。
系統有效性分析(System Effectiveness Analysis,SEA)是一種評估武器系統效能的方法,它首先將武器系統置于敵對環境,然后確定兩個相互獨立的系統屬性空間和使命屬性空間,最后將系統能力與使命要求進行空間比較,即可得到系統動態的效能值,在許多軍用系統中得到廣泛應用[3~5]。本文應用SEA方法綜合研究了UUV無人水下平臺的系統、環境、使命等要素,對UUV在情報偵察中的作戰效能進行動態評估。
2 UUV偵察過程分析
UUV系統一般由水下無人航行器本體(即通常指的UUV)和位于母平臺的支持系統組成[6]。UUV通常由載體結構、控制系統、導航系統、能源系統、推進系統和任務載荷等組成。支持系統通常由保障對UUV實施布放回收、能源補給、指揮控制、數據處理等作業的功能系統組成。
UUV在執行偵察時,一般會由母平臺在安全距離外布放,然后穿過敵方掌控區域進行有價值的數據搜集[7]。UUV執行偵察任務的過程可描述為:UUV準備完成后實施布放,入水后由程序控制自主航渡,在關鍵點可上浮進行精度校準或發送狀態信息和接收遙控指令,到達目標區后執行偵察任務,完成任務后返航到回收點進行回收及處理。因此,UUV從準備到回收可以分為七個階段:布放準備、布放、航渡、偵察、返航、回收和綜合處理,如圖1所示。其中,布放準備、布放及回收和綜合處理等四個階段主要由支持系統完成;航渡、偵察、返航等三個階段由UUV自主完成。

圖1 UUV單次偵察行動
3 UUV偵察效能SEA評估模型
3.1 偵察任務使命與性能度量
為實現對UUV偵察效能的動態評估,本文在一定的戰術背景下基于SEA方法進行效能評估。其中,UUV系統、環境、使命要素如圖2所示。性能度量(Measure of Performs,MOP)集合由三個指標構成:系統可靠性指標MOP1、系統生存力指標MOP2和系統偵察能力指標MOP3。
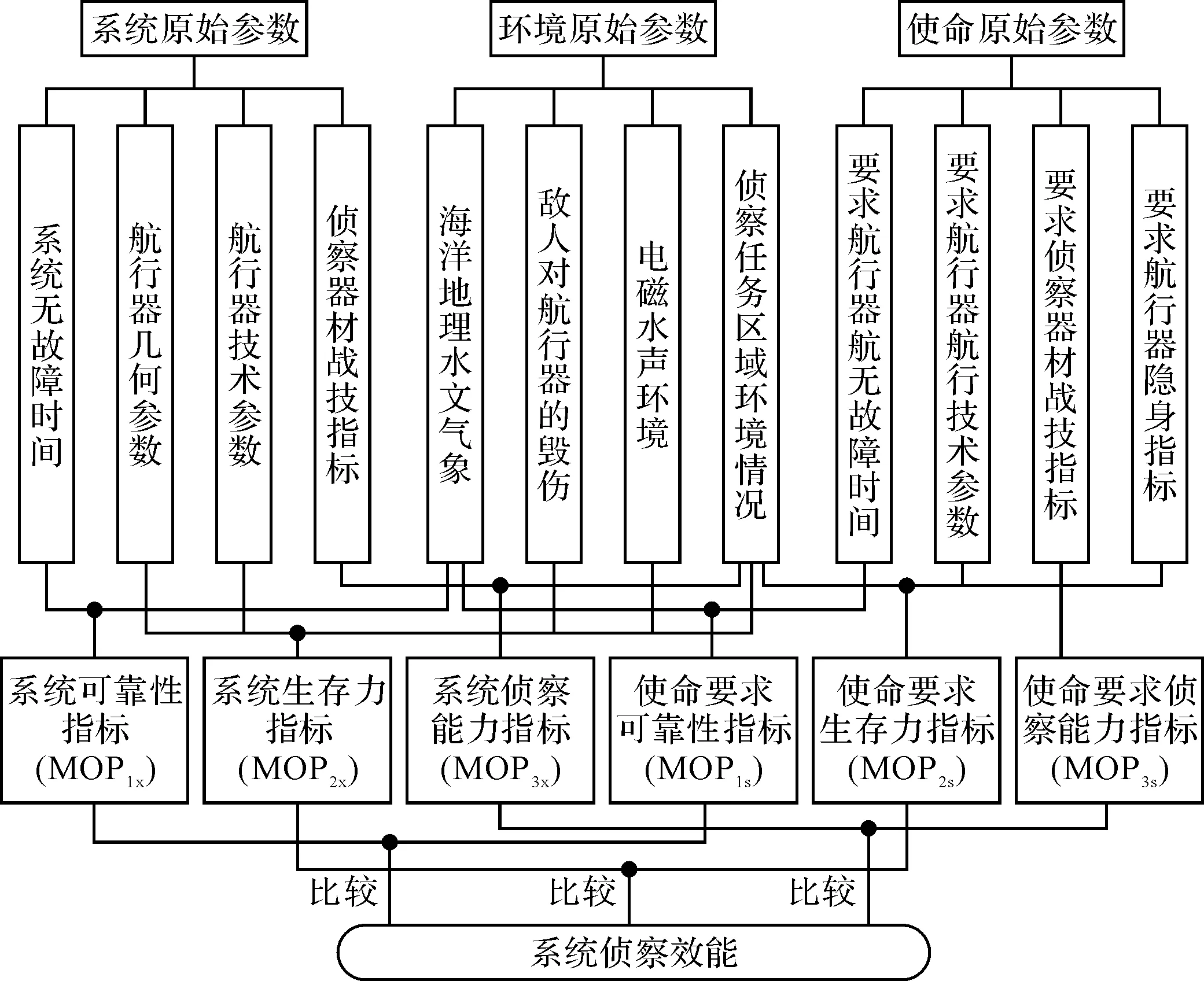
圖2 UUV系統偵察效能評估指標
3.2 系統映射
1) 可靠性指標MOP1的系統映射
可靠性指標MOP1的系統映射是指UUV、支持系統及偵察器材全部處于可靠狀態,對應的可靠概率為PHX、PMP、PZC。系統的可靠概率可以通過系統無故障工作時間與任務時間的指數來描述,具體關系如式(1)所示:
(1)
式中,THXBF、TMPBF、TZCBF分別為UUV、支持系統及偵察器材無故障工作時間,T為UUV執行偵察任務的時間。
2) 生存力指標MOP2的系統映射
系統的生存力主要與UUV的性能、隱身能力及戰場環境有關[8]。具體關系如式(2)所示:
MOP2=ε1·ε2·P
(2)
式中:ε1指航行器的基本性能參數;ε2指航行器的隱身能力;P指戰場環境影響概率。
航行器的主要性能參數ε1可用下潛深度、導航精度、避障聲納最大探測距離求得,公式為
(3)
式中:LXQ為最大工作深度(單位:m);δDH為UUV的導航精度(單位:m);DGB為避障聲納最大探測距離(單位:m);常數L0、δ0、D0分別代表典型UUV的工作深度、導航精度和避障聲納探測距離。
UUV的隱身能力ε2指可以用輻射噪聲級、磁感應強度和紅外輻射強度求得,公式為
(4)
式中:SAC為UUV輻射噪聲級(單位:dB);PMA為UUV磁感應強度(單位:T);χHW為UUV紅外輻射強度(單位:W/m2)。常數S0、P0、χ0分別代表典型UUV的輻射噪聲級、磁感應強度和紅外輻射強度。
戰場環境[9]影響概率P=PN·PZ,其中PN、PZ分別為UUV在自然環境、軍事環境影響下成功完成任務的概率。自然環境主要是指連接陸地的海區,如邊緣海、海灣、港口等水域及海岸等,航行水深較淺,過往船只較多,水中會有不明障礙物(如漁網),加之缺乏精細的海底地圖,這些都會對UUV的作戰效能產生影響;自然環境的影響概率可以根據經驗估計得到。軍事環境指敵方的反潛兵力和水下監視系統。結合具體的作戰想定和敵方反潛手段,如得到UUV突破敵人反潛巡邏區時被發現的概率為PFX,由于UUV航速低、智能程度有限,被發現就意味著被摧毀,因此航行器被摧毀的概率亦為PFX;航行器被敵水聲站發現的概率為PSS,敵反潛體系做出反應并發現UUV的概率為PTX,所以此時航行器被摧毀的概率PSXTX=PSSPTX;因此,UUV成功到達任務區的概率PQ為
PQ=(1-PFX)(1-PSSPTX)
(5)
考慮到UUV在完成任務后仍須返回預定海域進行回收作業,所以PZ=PQ·PQ。
3) 偵察能力指標MOP3的系統映射
航行器的偵察能力與UUV偵察器材性能、作戰環境和作業方法密切相關。UUV在水下能夠利用水聲裝備和光學儀器對海底進行偵察,一般會有兩種偵察方式:一是以固定航速沿直線方向偵察;二是按“梳”字形機動偵察。因此,UUV在水下的偵察能力可以用MOP3=SD/S表示。其中SD是UUV實際偵察到的區域面積;S是軍事想定中要偵察區域的總面積。
3.3 使命映射
對UUV進行抵近偵察的要求是:結合使命任務和戰場環境,選擇合適的偵察器材和方法,獲得準確、全面的情報,為指揮決策提供依據。最好的態勢是UUV能夠安全地完成對指定區域的偵察任務,采集的數據質量高,定位誤差較小。最差的態勢是UUV受自身因素或敵人的毀傷無法按計劃完成對指定區域的偵察任務,或者從UUV下載的數據不能提供任何有價值的信息。
1)MOP1的使命映射
針對UUV系統執行偵察任務的使命,對于MOP1的使命范圍,UUV系統在執行任務時,最好的情況是沒有出現任何故障,將MOP1G限定為1.00。最差的情況就是UUV在執行偵察任務時,系統的航行器、母船(艇)支持系統及偵察器材都發生致命性故障,任務不能完成,此時,保底能完成使命任務的可靠性指標為
(6)
式中THXBXF,TMPBCF,TZCBCF分別是UUV、母船(艇)支持系統及偵察器材發生致命性故障的平均時間。所以將可靠性指標MOP1的使命映射的值域限定在[MOP1B,1.00]。
2)MOP2的使命映射
結合UUV系統執行偵察任務的具體使命和戰場環境,UUV的生存力指標必須不低于一定的閾值,低于這個值UUV就可能被敵反潛力量摧毀或在航行過程中沉沒,完成任務的機會很小,所以將MOP2的值域限定在[ε,1]。
3)MOP3的使命映射
UUV系統在執行任務時要求能順利地按要求對指定偵察區域進行偵察,最差也要在重點偵察區域經過。所以MOP3的值域為[SZ/S,1],其中SZ為重點偵察區域的面積。
3.4 效能度量
根據SEA方法思路,下面將MOP1、MOP2、MOP3綜合得出系統的作戰效能。由于系統可靠性、生存力和偵察能力是整個UUV系統執行偵察任務的必要環節,符合基本串聯系統的特征[10],可以利用以下公式評估系統的偵察效能:
MOP=MOP1·MOP2·MOP3
(7)
4 實例分析
以執行偵察任務的某型UUV系統為例進行分析。具體的計算過程如下:
1) 該UUV由水面艦布放回收,任務時間共72h。UUV、母平臺支持系統及偵察器材無故障工作時間分別為1440h、8640h、720h,因此MOP1=0.854。
2) UUV的最大工作深度為280m,導航精度為18m,避障聲納最大探測距離190m;選取的典型UUV的工作深度為300m,導航精度為16m,避障聲納最大探測距離為200m,因此ε1=0.928。UUV的輻射噪聲級為100dB,磁感應強度為10-2Gs,紅外輻射強度為10-3W/m2;選取的典型UUV的輻射噪聲級為98dB,磁感應強度為0.9×10-2Gs,紅外輻射強度為0.9×10-3W/m2,因此ε1=0.890。根據UUV在執行任務前的海戰場信息可估計自然環境對UUV的影響概率為0.98;在UUV突破敵反潛巡邏區時被敵巡邏艇發現的概率PFX為0.05,被敵水聲站發現的概率PSS為0.05,敵反潛體系做出反應并發現UUV的概率PTX為0.5,因此UUV成功到達任務海區的概率PQ為0.926,成功到達并返回的概率PZ為PZ=0.856。所以MOP2=0.707。
3) UUV在進行偵察時,水聲器材在海底可覆蓋的有效寬度為200m,UUV在任務區共航行40h,航速為4kn,因此偵察面積為17.279n mile2。如在本次軍事想定中,UUV的偵察區域總面積為20n mile2,則UUV的偵察能力MOP3=0.863。
綜上根據式(7),UUV系統的偵察效能為0.52。
5 結語
本文針對UUV系統偵察效能評估問題,運用SEA方法進行了建模與求解。要想具體準確評估UUV系統的偵察效能,需要建立更加完善的指標體系和更全面、精確的性能度量,特別是要基于戰場環境參數、系統原始參數及使命的原始參數進行計算。本文在選取性能度量的過程中,作了一定程度的簡化,選取了影響UUV系統偵察效能較大的因素,構建了偵察效能評估指標及系統映射和使命映射的數學模型,并結合具體實例進行了求解,評估的結果能從一定程度反映出了UUV系統的偵察能力。
[1] 陳強,袁思鳴.水下無人航行器總體論證方法研究[J].論證與研究,2013(4):30-33.
[2] 胡必文,程彬彬.淺析水下無人作戰平臺現狀及未來作戰使命[J].水雷戰與艦船防護,2013,21(4):67-71.
[3] 郭齊勝,張磊.武器裝備系統效能評估方法研究綜述[J].計算機仿真,2013,30(8):1-4.
[4] 孫文紀,屈洋,陳艷彪.基于SEA的裝甲兵島上進攻作戰效能評估[J].兵工自動化,2014,33(8):44-48.
[5] 薛向鋒,侯智斌,孫彥飛.基于SEA的炮兵空中力量偵察效能動態評估[J].現代電子技術,2012,35(11):52-57.
[6] 陳強.水下無人航行器[M].北京:國防工業出版社,2014:44-54.
[7] 王光榮.無人潛航器任務構想[M].北京:海潮出版社,2010:61-70.
[8] 栗蘋.信息對抗技術[M].北京:清華大學出版社,2003:236-271.
[9] 池亞軍,薛興林.戰場環境與信息化戰爭[M].北京:國防大學出版社,2010:82-104.
[10] 金偉新.“串并聯”模型框架與作戰效能評估[J].系統工程與電子技術,2001,23(7):41-43.
Reconnaissance Efficiency of Unmanned Underwater Vehicle Based on SEA
HE Xiying1HUANG Fan2ZHU Jing1LIN Weichuan1
As a new type of unmanned operational platform, the UUV can carry out reconnaissance missions in place of submarines, and the scientificalness and rationality of its effectiveness evaluations will have a direct effect on the operational use of the unmanned undersea platform. Based on SEA and the system features of UUV, the reconnaissance index of effectiveness evaluation is established, and three main measures of performance aiming at UUV are also proposed. Finally, the dynamic evaluation model of the UUV reconnaissance effectiveness is researched, and the operational effectiveness of UUV system is evaluated.
unmanned underwater vehicle, SEA method, reconnaissance efficiency, measures of performance
2016年6月8日,
2016年7月26日
何希盈,男,博士,講師,研究方向:無人水下信息作戰。黃凡,男,博士,工程師,研究方向:裝備監造與軍用目標特性。朱璟,男,碩士,講師,研究方向:模式識別與智能系統。林為傳,男,碩士,講師,研究方向:無人裝備保障。
TN911.7
10.3969/j.issn.1672-9730.2016.12.036
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
