三電平異步電機矢量控制系統(tǒng)的研究
2017-01-11 01:14:51郭殿林于宗艷王寶春
黑龍江電力 2016年6期
郭殿林,包 兵,于宗艷,陳 坤,萬 丹,王寶春
(1.黑龍江科技大學 電氣與控制工程學院,哈爾濱 150022; 2.大慶油田工程建設有限責任公司油建公司,黑龍江 大慶 163712)
●電網(wǎng)設備●
三電平異步電機矢量控制系統(tǒng)的研究
郭殿林1,包 兵1,于宗艷1,陳 坤1,萬 丹1,王寶春2
(1.黑龍江科技大學 電氣與控制工程學院,哈爾濱 150022; 2.大慶油田工程建設有限責任公司油建公司,黑龍江 大慶 163712)
針對傳統(tǒng)SVPWM控制算法存在大量的函數(shù)計算,計算精度低,實時性與精確性差,難以滿足礦用異步電動機驅(qū)動系統(tǒng)的控制要求,結(jié)合異步電動機的數(shù)學模型、采用新型三電平60°坐標系SVPWM算法,搭建了基于二極管鉗位三電平變換器60°坐標系SVPWM的新型MATLAB異步電動機矢量控制系統(tǒng)。通過對控制系統(tǒng)進行仿真分析與實驗,結(jié)果表明該算法減少了運算時間,提高了計算精度,滿足了礦山實際應用需求。
三電平SVPWM;60°坐標系;矢量控制
目前礦用異步電動機的驅(qū)動系統(tǒng)為多電平逆變器拓撲結(jié)構,其控制采用三電平SVPWM算法[1-4],但是該控制算法存在大量的函數(shù)計算,計算精度低,實時性與精確性滿足不了現(xiàn)在對逆變器控制的要求,限制了新型逆變器的發(fā)展。對此,為解決這些問題,本文在分析異步電動機數(shù)學模型的基礎上,采用新型三電平60°坐標系SVPWM算法,搭建了基于二極管鉗位三電平變換器60°坐標系SVPWM的新型MATLAB異步電動機矢量控制系統(tǒng),以驗證該算法的可行性。
1 異步電動機數(shù)學模型
本文選擇籠型異步電動機為研究對象,因此按轉(zhuǎn)子磁場定向時異步電動機在兩相同步旋轉(zhuǎn)坐標系下,得到轉(zhuǎn)子磁鏈與定轉(zhuǎn)子電流的關系式為
(1)
根據(jù)轉(zhuǎn)矩公式可得電流的交軸分量和電機轉(zhuǎn)矩的關系為
(2)
式中:np為磁極對數(shù);Lm為定轉(zhuǎn)子繞組之間的等效互感;Lr為轉(zhuǎn)子繞組值得的等效自感。
兩相同步旋轉(zhuǎn)坐標系下電壓約束方程為
(3)
式中:Rs為定子繞組的等效電阻;ωs為轉(zhuǎn)子相對定子的相對角速度;ω1、ωr分別為同步角速度和轉(zhuǎn)子角速度;ρ為微分算子。
由式(1)和式(3)可以得出定子電流兩個分量與轉(zhuǎn)差角速度和轉(zhuǎn)子磁鏈的關系為
(4)
由于異步電動機的定子電壓在旋轉(zhuǎn)坐標系下,交、直軸分量并沒有完全解耦,因此需要對電壓進行前饋補償控制。
在穩(wěn)態(tài)時轉(zhuǎn)子磁鏈恒定不變,即:φr=Lmism,則由式(3)可得關系式為
(5)
由式(5)得出電壓前饋補償值為
(6)
2 三電平60°坐標系SVPWM
2.1 逆變器拓撲結(jié)構
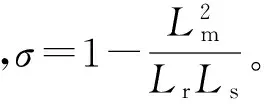
在逆變器部分采用中點二極管鉗位式三電平拓撲結(jié)構,以一相橋臂為例,其拓撲結(jié)構以及橋臂上四個開關管之間的邏輯關系如圖1所示。
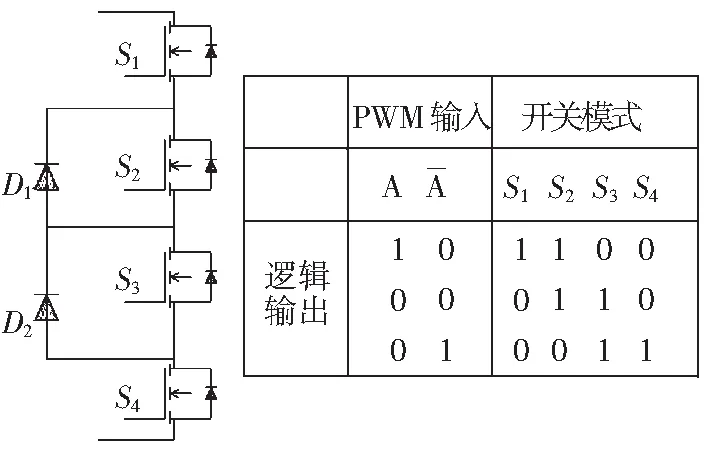
圖1 逆變器的一相橋臂拓撲結(jié)構與對應的開關模式
通過開關模式可以分析逆變器1相輸出有三種狀態(tài),即S1、S2導通時為P狀態(tài);S2、S3導通時為O狀態(tài);S3、S4導通時為N狀態(tài)。三相輸出共有27種組合,其中大矢量和中矢量各有6種、小矢量12種以及零矢量3種[5-6]。
2.2 90°坐標系到60°坐標系轉(zhuǎn)化
由于60°坐標系下的空間矢量控制方法相比于傳統(tǒng)方法在計算復雜度與精度等方面擁有很大優(yōu)勢,因此在控制系統(tǒng)中采用此種算法。在坐標轉(zhuǎn)化過程中必須遵循能量守恒和磁鏈守恒原則,從數(shù)學角度與物理角度上,將直角坐標系轉(zhuǎn)換成60°坐標系需要的變換關系式為
(7)
由此可得到在60°坐標下的矢量空間分布,如圖2所示。
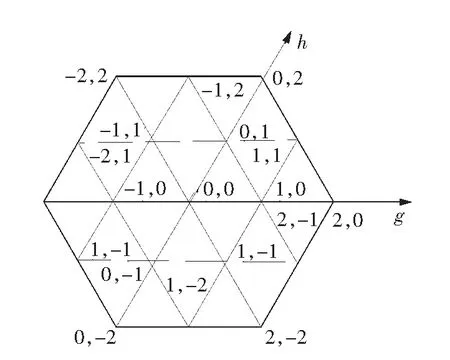
圖2 60°坐標系空間矢量圖
在扇區(qū)的判斷和矢量作用時間計算的方法上與傳統(tǒng)算法相類似,但是從空間矢量圖2可以看出,60°坐標系SVPWM算法在計算的難度和復雜度方面都有所降低,所以在軟件的實現(xiàn)中,提高了精確性與實時性。
3 模型建立與仿真分析
通過以結(jié)構層次化與模塊化的結(jié)合思想,并借助于MATLAB優(yōu)越的仿真運算能力構建了控制系統(tǒng)整體仿真模型,如圖3所示。
現(xiàn)實中電機的啟動有一個充磁的過程,當轉(zhuǎn)子的磁鏈值沒有達到系統(tǒng)所設定的初始值,整個控制系統(tǒng)是不起作用的,如圖4所示。
本文在系統(tǒng)仿真中采用的異步電動機參數(shù)為:UN=1140 V,RS=10.91 mΩ,Lls=0.36 mH,Rr=7.65 mΩ,Llr=0.36 mH,Lm=11.842 mH,J=4.0 kg·m2,直流母線電壓取500 V,極對數(shù)取np=2,其仿真波形如圖5所示。
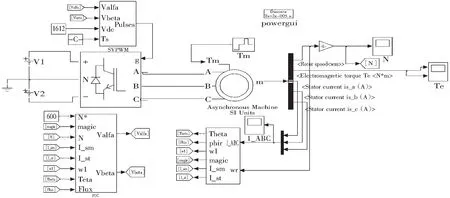
圖3 控制系統(tǒng)仿真模型
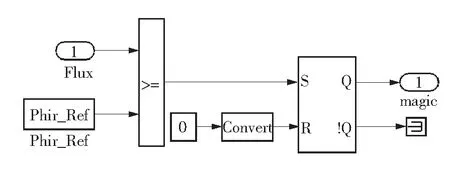
圖4 充磁仿真模型
從圖5可以看到,在給定轉(zhuǎn)速N*=600 r/min,0到1.3 s之間,電機處在充磁環(huán)節(jié),充磁完成后電機轉(zhuǎn)速達到給定轉(zhuǎn)速,整個過程轉(zhuǎn)速上升平滑,超調(diào)很小,即使在1.5 s加上負載后,電機的轉(zhuǎn)矩與定子三相電流有明顯的響應,但電機轉(zhuǎn)速波動不大,基本實現(xiàn)了電動機的恒速運行。在隨后的幾個時刻加上不同負載,通過波形觀察也證明了該控制系統(tǒng)仿真模型的合理性和有效性。
4 系統(tǒng)實現(xiàn)
在實驗室,對搭建的三電平矢量控制系統(tǒng)進行了實驗,目的是驗證應用新型三電平60°坐標系SVPWM算法的可行性。
本文搭建的三電平矢量控制系統(tǒng)主要由主回路與控制回路兩部分組成,主回路中逆變部分采用型號FGL40N150D的IGBT作為開關管,控制器以TMS320F2812作為控制芯片。為了增強抗干擾能力,DSP與控制對象的之間的信號采用光的形式傳輸,而且為了保證信號傳輸?shù)木_性,在實驗中使用光纖作為信號傳輸線,其中光發(fā)射器型號為HFBR-1522、光接觸器型號為HFBR-2522。由于DSP輸出的PWM信號無法驅(qū)動IGBT,因此在驅(qū)動電路上采用型號PSPC 0330的三電平拓撲結(jié)構專用驅(qū)動模塊,它是基于新一代PSHI 0330驅(qū)動核設計用于驅(qū)動三電平拓撲結(jié)構,模塊內(nèi)部含有電源欠壓保護;內(nèi)置驅(qū)動用DC/DC隔離驅(qū)動;最高工作頻率可達80 kHz;具有故障同步功能等特點。以一相橋臂上開關S3、S4為例,其驅(qū)動接線方式如圖6所示。
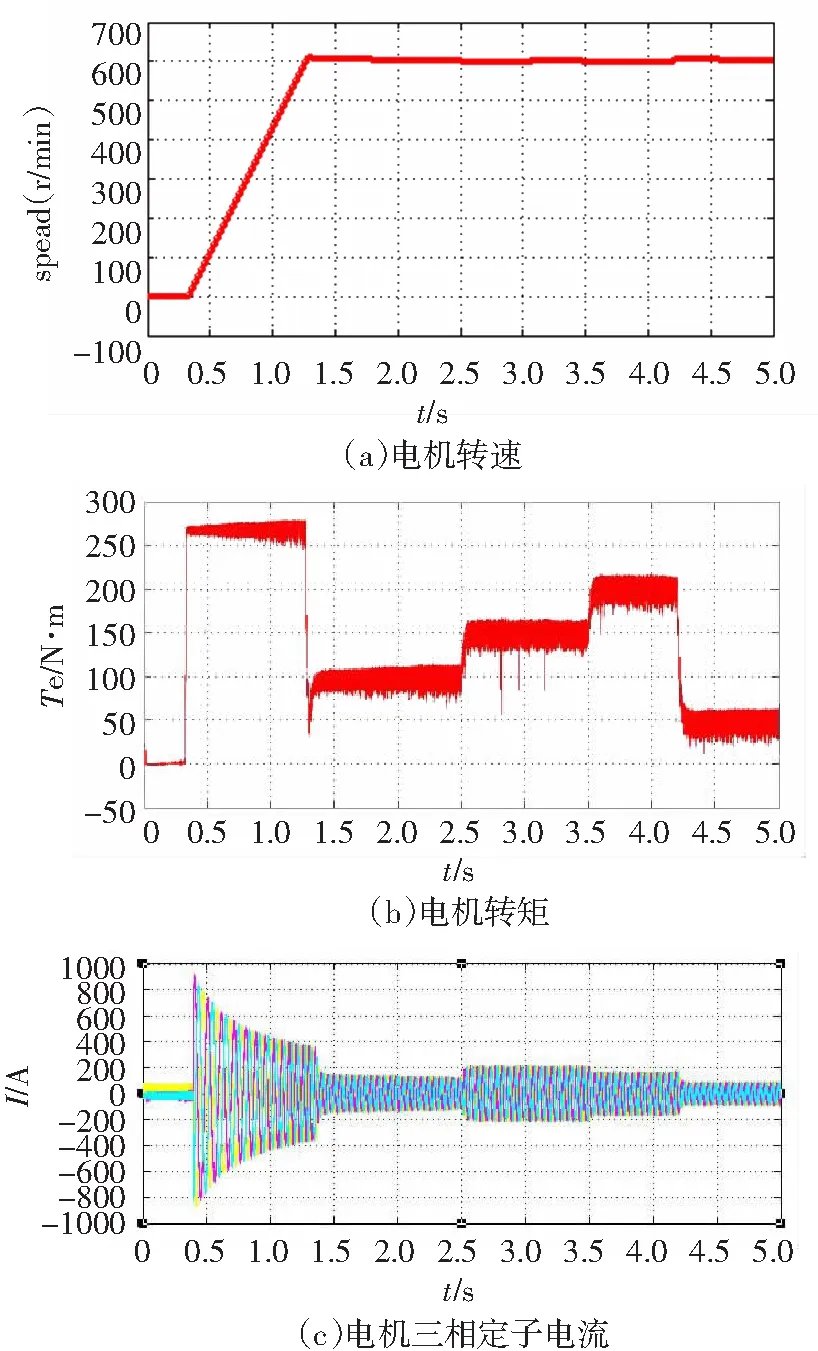
圖5 仿真波形圖
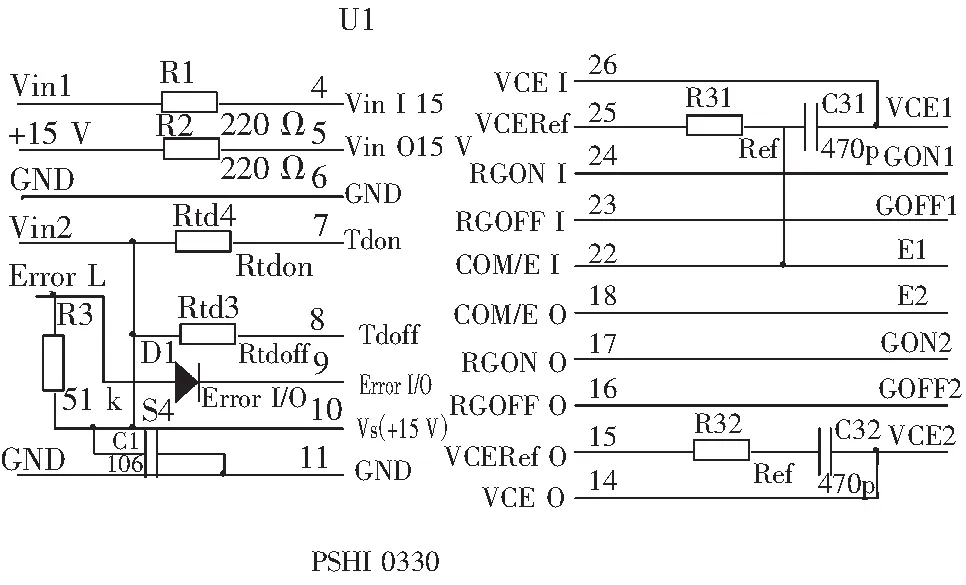
圖6 開關S3、S4的驅(qū)動接線圖
驅(qū)動模塊與IGBT連接如圖7所示。

圖7 柵極驅(qū)動連接圖

在實驗平臺,采用的異步電動機為5.5 kW的YTSZ31L-4,輸入直流電壓1500 V,系統(tǒng)運行實驗結(jié)果如圖8所示。
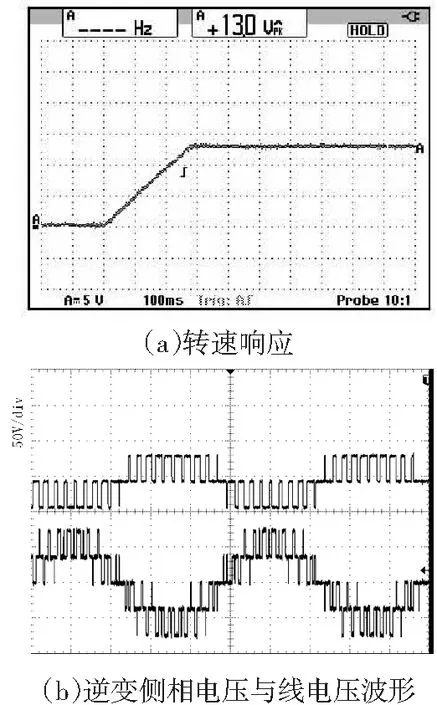
圖8 實驗結(jié)果波形
從圖8可以看出,采用新型SVPWM算法的三電平異步電機矢量控制系統(tǒng)的轉(zhuǎn)速響應波形與系統(tǒng)仿真輸出結(jié)果一致,并且通過DSP編寫的新型三電平SVPWM算法程序可以看出該算法與傳統(tǒng)控制算法相比,在程序的運算過程中減少了大量的函數(shù)計算,而且在逆變器的交流側(cè)還能得到較好的相電壓與線電壓波形。
5 結(jié) 語
通過上述分析及仿真實驗結(jié)果得知,基于60°坐標系三電平變換器SVPWM算法搭建的異步電動機矢量控制系統(tǒng)有效、可行,而且多電平逆變器結(jié)構以及60°坐標系SVPWM算法能夠與異步電動機調(diào)速系統(tǒng)進行合理組合,簡化了計算步驟,提高了計算精度,滿足了實際需求。這表明,該算法能為中壓大功率傳動系統(tǒng)中電動機的控制提供新的控制方法,也能為礦用電氣設備中高壓驅(qū)動實際控制系統(tǒng)的研究與設計提供理論依據(jù)。
[1] 陸海峰.礦用大功率中壓變頻器系統(tǒng)設計與樣機研制.上海交通大學工學碩士論文[D],2008(2):1-3.LU Haifeng.Design and experimental research on the high power medium voltage inverter using in mine[D].Shanghai Jiao Tong University,2008(2):1-3.
[2] 莫紅影.礦用電機三電平高壓變頻器的控制研究.河北工業(yè)大學工學碩士論文[D].2010(12):1-3.MO Hongying.Research on three-level high voltage inverter of mining motor[D].Hebei University of Technology,2010(12):1-3.
[3] SEN J,BUTTERWORTH N.Analysis and design of a three-phase PWM converter system for railway traction applications[J].IEEE Proceedings on Electric Power Applications,1997,144(5):357-371.
[4] STEINKE J K,PRENNER H,et al.New variable speed drive with proven motor friendly performance for medium voltage motors[J].IEEE IEMD,1999:235-239.
[5] 李先祥.三電平矢量控制的永磁同步伺服電動機調(diào)速系統(tǒng)[J].電工技術學報,2004,6(4):28-31.LI Xianxiang.Permanent magnet synchronous motor control system based on three-level vector control[J].Transactions of China Electrotechnical Society,2004,6(4):28-31.
[6] SUBBA G.REDDY.Vector controller based speed control of induction motor drive with 3-Level SVPWM based inverter[J].IJETEE,2013,1(4):1-11.
(責任編輯 郭金光)
Research on vector control system of three-level asynchronous motor
GUO Dianlin1, BAO Bing1, YU Zongyan1, CHEN kun1, WAN Dan1,WANG Baochun2
(1.Institute of Electric and Control Engineering,Heilongjiang University of Science and Technology,Harbin 150022,China; 2.Oilfield Construction Company of Daqing Oifield Engineering Construction Co.,Ltd.Daqing 163712,China)
Since the traditional three-level SVPWM algorithm has many disadvantages,such as a great amount of function computation,low calculation accuracy,poor real time and accuracy,it hardly meets the requirements of three-level asynchronous motor using in mine for control system.According to the mathematical model of asynchronous motor,the author used the new type of three-level 60° coordinates SVPWM algorithm to design the new vector control system of MATLAB asynchronous motor based on Diode clamp three-level 60° coordinates SVPWM.Through the simulation and experiment of the control system,it is proved that the algorithm,reducing the operation time and enhancing the calculation accuracy,is convenient for practical application in mine.
three-level SVPWM; 60° coordinates; vector control
2016-05-24。
黑龍江省教育廳面上項目:12541733。
郭殿林(1972—),副教授,在讀博士,從事電力電子與電力傳動的研究。
TM46; TM343
A
2095-6843(2016)06-0525-04
