風機安全鏈電路分析及安全控制策略的探討
2017-01-13 02:12:11楊雄杰徐文舉
東方汽輪機 2016年4期
關鍵詞:故障
楊雄杰,徐文舉
(1.東方電氣風電有限公司,四川德陽,618000;2.東方電氣(酒泉)新能源有限公司,甘肅酒泉,735000)
風機安全鏈電路分析及安全控制策略的探討
楊雄杰1,徐文舉2
(1.東方電氣風電有限公司,四川德陽,618000;2.東方電氣(酒泉)新能源有限公司,甘肅酒泉,735000)
風機安全鏈是風機控制系統的核心控制電路,它實時監控涉及風機安全的各部分控制環節,是確保風機安全可靠穩定運行的重要保障。文章以MITA WP3100主控系統為例,從安全鏈的電源、安全鏈自鎖回路、安全鏈觸發、安全鏈復位等幾個方面分析了風機安全鏈電路,對提高風機安全鏈電路的認識及故障處理有指導作用;對風機安全控制策略提出了改進思路。
安全鏈,超速模塊,MITA WP3100
0 引言
要提高風機的可利用率或實現風場無人值守運行,最重要的工作是要確保風機安全穩定地自動運行。風機安全鏈是確保風機安全運行的核心控制電路,風機安全鏈主要由安全鏈電源、安全鏈自鎖回路、安全鏈觸發、安全鏈復位等幾個部分組成。以下從這幾個方面,分析論述安全鏈的構成并對實際運行中遇到的安全鏈問題進行討論。
1 風機安全鏈電路構成
所謂風機安全鏈就是由直流24 V供電,串聯一系列常閉開關接點的繼電器自鎖回路。這個繼電器叫安全鏈繼電器。風機正常時,安全鏈繼電器得電自鎖閉合,遇到緊急狀況時,對應故障的常閉開關接點斷開,安全鏈斷開,安全鏈繼電器斷開,風機剎車程序200,處于緊急剎車狀態,葉片通過后備電源快速收槳。主軸剎車立即抱死。
1.1安全鏈電源
圖1為安全鏈24 V直流電源結構圖。
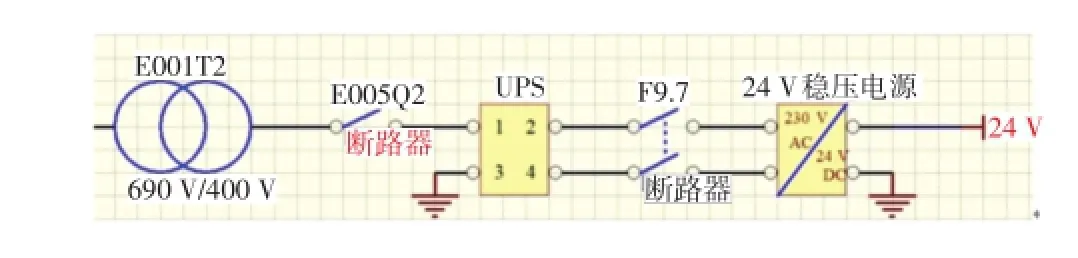
圖1 安全鏈電源結構圖
風機電網電壓690 V通過一個開關接到容量為40 kVA的三相變壓器E001T2,把690 V變為三相400 V;單相對地變為230 V,通過開關E005Q2給UPS供電。UPS輸出230 V交流電通過約100 m長的電纜從塔基變頻器柜送到機艙主控柜;通過F9.7開關給24 V電源模塊供電,最后24 V電源模塊給安全鏈回路提供24 V直流穩壓電源。當電網掉電時,由UPS提供約3 min的電源支持。
1.2安全鏈回路
安全鏈回路分為兩部分:
第一部分為急停安全鏈繼電器回路,如圖2所示。
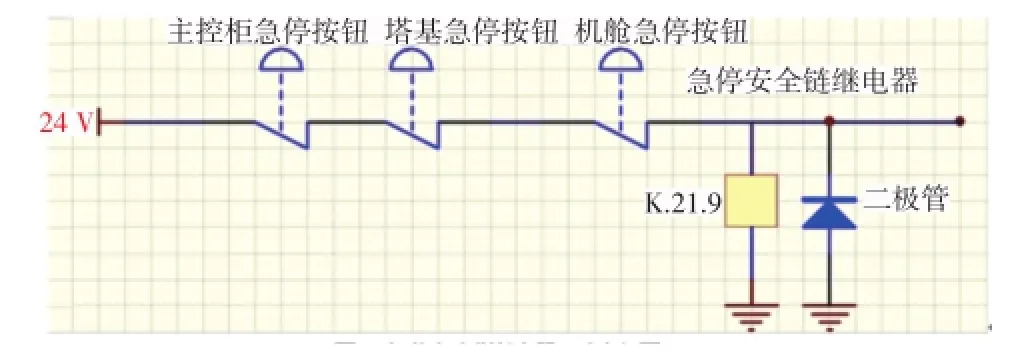
圖2 急停安全鏈繼電器回路方框圖
帶自鎖功能的3個緊急停止按鈕,分別布置在機艙主控柜面板上、塔基變頻器在控制柜面板上、機艙可便攜移動的急停按鈕盒3個位置。3個常閉開關串聯在一起,機艙主控柜急停按鈕通過90 m左右電纜連接到塔基變頻器控制柜急停按鈕常閉開關的一端,另一端再從塔基通過90 m左右電纜返回機艙控制柜和機艙可便攜移動的急停按鈕盒連接。機艙可便攜移動的急停按鈕盒常閉開關出線后連接急停安全鏈繼電器。
如圖3所示:正常情況下,3個緊急停止按鈕開關閉合,急停安全鏈繼電器K.21.9線圈帶電動作。其常開接點閉合,允許手動偏航。
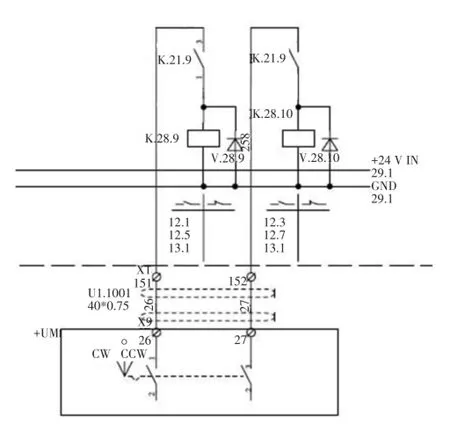
圖3 手動偏航控制電路
3個緊急停止按鈕中任意一個被按下后,急停安全鏈繼電器K.21.9線圈斷電。其常開接點斷開,切斷了手動CW偏航繼電器K.28.9線圈及手動CCW偏航繼電器K.28.10線圈的供電,禁止手動偏航。同時中斷了安全鏈供電,安全鏈斷開,激活剎車200。
安全鏈回路第二部分為安全鏈控制電路,如圖4所示。
來自急停安全鏈繼電器電路的24 V電源,順序串聯葉片維護開關、偏航CW及CCW極限位置開關、機艙晃動傳感器開關、主軸超速模塊開關、齒輪箱超速模塊開關、主控系統OK信號開關,一共串接了7個開關接點。
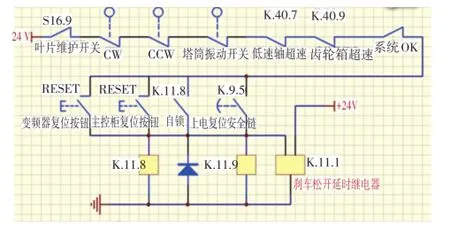
圖4 安全鏈控制電路方框圖
當風機系統正常,沒有出現任何故障時,葉片維護開關、偏航CW及CCW極限位置開關、機艙晃動傳感器開關、主軸超速模塊開關、齒輪箱超速模塊開關、主控系統OK信號開關7個接點全部導通。
按下機艙控制柜復位按鈕或按下變頻器控制柜復位按鈕后,整個安全鏈復位,安全鏈繼電器K.11.8、K.11.9得電動作,K.11.8繼電器的一個常開接點自鎖閉合,安全鏈處于復位閉合自鎖狀態,同時給主控142端口送一個高電平,通知主控說明安全鏈處于閉合正常狀態。
2 安全鏈處于復位閉合自鎖狀態時,安全鏈的控制功能
(1)給CW偏航及CCW偏航電機繼電器提供230 V交流電源。安全鏈斷開時禁止機艙自動偏航。
(2)給電池快速收槳信號提供復位。安全鏈斷開時,立即啟動電池快速收槳。
(3)給變頻器提供復位信號。經過一個交流中間繼電器轉換,將直流24 V電壓等級的主控安全鏈繼電器常開接點轉換為230 V交流繼電器接點,串聯到一個230 V交流電壓的變頻器并網斷路器失壓脫扣線圈回路,安全鏈斷開時,立即斷開并網斷路器。
(4)給偏航剎車繼電器、發電機散熱風扇繼電器提供電源。安全鏈斷開時,偏航剎車器處于剎車狀態,發電機風扇停止工作。
(5)給齒輪箱的循環油泵繼電器、齒輪箱散熱風扇電機繼電器、齒輪箱加熱繼電器提供電源。安全鏈斷開時,禁止齒輪箱的循環油泵、齒輪箱散熱風扇、齒輪箱加熱器工作。
(6)給風機起動時,葉片92°限位開關旁路信號提供復位。安全鏈斷開時,禁止葉片動作。
(7)給主軸剎車繼電器提供電源。安全鏈斷開時,主軸剎車處于剎車狀態。
3 安全鏈觸發
3.1葉片維護開關
需要進入輪轂工作時,必須把葉片維護開關打到位置“1”,將風機安全鏈斷開。可以確保維護人員在輪轂里工作時,風機無法遠程復位或自動復位起動運行。同時給輪轂控制器手動操作提供支持。
3.2風機偏航極限位置開關
風機正向偏航CW及反向偏航CCW壓到極限位置開關時,將風機安全鏈斷開。禁止繼續偏航,防止從塔筒底部送到機艙上的690 V/400 V、UPS電源電纜、發電機靜/轉子電纜及光纖被扭斷。可以通過手動反方向偏航到機艙初始零位解除硬件報警,恢復安全鏈。
3.3機艙晃動傳感器開關
當風機強烈振動,引起機艙前后或左右晃動超過設定保護值時,機艙晃動傳感器動作,將風機安全鏈斷開。
3.4主軸超速檢測模塊開關K.40.7
在風機主軸上安裝有主軸轉速測速盤,主軸旋轉一圈,可以產生24個脈沖。
例如:主軸旋轉速度為12 r/min,脈沖頻率為:24×12/60=4.8 Hz。主軸允許最大旋轉速度為25 r/min,對應脈沖頻率為10 Hz,當模塊檢測到脈沖頻率大于10 Hz時,主軸超速檢測模塊開關的常開接點斷開,將風機安全鏈斷開,同時給主控139端口一個高電平信號,通知主控主軸超速模塊動作了。當轉速下降,脈沖頻率小于10 Hz時,主軸超速檢測模塊開關復位,其常開接點接通,但安全鏈需要人工復位,其常閉接點斷開,給主控的高電平信號斷開,通知主控主軸旋轉速度已經小于超速整定值,允許人工復位。
主軸超速模塊的干接點,設計為帶電吸合,可以監視UPS電源或模塊的接插件是否接觸良好。接插件松動或UPS掉電時,立即觸發安全鏈動作。
3.5齒輪箱高速軸超速檢測模塊開關K.40.9
在風機齒輪箱輸出軸上安裝有齒輪箱高速軸測速盤,齒輪箱高速軸旋轉一圈,可以產生2個脈沖。
例如:主軸旋轉速度為2 100 r/min,脈沖頻率為:2 100×2/60=70 Hz。例如齒輪箱高速軸允許最大旋轉速度為1 950 r/min,對應脈沖頻率為65 Hz,當模塊檢測到脈沖頻率大于65 Hz時,齒輪箱高速軸超速檢測模塊開關的常開接點斷開,將風機安全鏈斷開。同時給主控140端口一個高電平信號,通知主控:齒輪箱高速軸超速模塊動作了。當轉速下降,脈沖頻率小于65 Hz時,齒輪箱高速軸超速檢測模塊開關復位,其常開接點接通,但安全鏈需要人工復位,其常閉接點斷開,給主控的高電平信號斷開,通知主控:齒輪箱高速軸旋轉速度已經小于超速整定值,允許人工復位。
齒輪箱超速模塊的干接點,設計為帶電吸合,可以監視UPS電源或齒輪箱超速模塊的接插件是否接觸良好。如果超速模塊接插件松動或主控UPS掉電時,立即激活安全鏈動作。
3.6 WP3100內部繼電器
WP3100主控器實時檢測風機主軸、齒輪箱高速軸、發電機軸的轉速,如果超過允許的最大值,則WP3100內部繼電器斷開觸發安全鏈斷開。
WP3100主控器實時檢測風機機艙可移動急停按鈕、變頻器急停按鈕、機艙控制面板急停按鈕的工作狀態,如果檢測到按鈕動作,則WP3100內部繼電器斷開觸發安全鏈斷開。
4 安全鏈復位
4.1安全鏈上電復位
電網停電后再來電時,上電復位繼電器K.9.5延時150 s,一方面其常開接點單穩態動作,導通1 s,相當于人工按動一次復位按鈕;另一方面其常閉接點斷開,給主控系統一個低電平有效的復位信號。通知主控開始自檢,如果系統自檢正常通過,則安全鏈自動復位。安全鏈復位正常后,主軸剎車延時繼電器K.11.10延時24 s,松開主軸剎車。風機開始啟動。
4.2風機安全鏈觸發故障復位
如果風機由于偏航計數器硬件觸發,或風機主軸或風機齒輪箱超速模塊動作,或風機振動超標引起晃動傳感器動作,或主控檢測到軟件超速都將激活安全鏈斷開。此時無法通過風機監控SCAD系統遠程復位,必須人工到風機塔筒變頻器面板或風機機艙主控面板進行就地復位。目的是要現場人員必須就地解決安全鏈觸發的故障,才允許風機再次起動,以免故障擴大。
5 關于風機安全鏈問題的討論
5.1安全鏈觸發后,手動偏航是否起作用
安全鏈觸發分兩種情況,一種是由急停按鈕引起的安全鏈觸發,例如:機艙可移動急停按鈕或機艙控制面板急停按鈕或變頻器急停按鈕動作引發的安全鏈觸發。這種情況下,手動偏航不起作用。
另一種是由于葉片維護開關、偏航CW及CCW極限位置開關、機艙晃動傳感器開關、主軸超速模塊開關、齒輪箱超速模塊開關、主控系統OK信號開關等一共串接了7個開關接點所引起的安全鏈觸發,可以執行手動偏航。
正是因為有了這個功能,在風機調試時為了節省調試時間,只要在安全風速下,風機的輪轂調試與機艙偏航調試可以同時進行。
也正是因為這個原因,使用手動偏航時,有可能將電纜過度扭轉而損壞。目前風機塔筒底部變頻器面板上的手動偏航開關都改成手動按鈕式開關,人離開時偏航即刻停止。以防止風機停電時,不小心把偏航開關置位,風機來電時風機一直處于偏航狀態,直到把電纜扭斷的情況發生。由于偏航轉動一圈需要12 min,機艙偏航調試時也要特別注意小心偏航扭轉過度損壞電纜。
5.2風機安全鏈觸發后,安全鏈斷開,主軸剎車是否立即投入
風機安全鏈觸發后,安全鏈斷開,激活剎車200,主軸剎車立即投入。
如果風機處于滿功率發電狀態,安全鏈斷開后,激活剎車200,主軸剎車立即投入。剎車系統將產生2.5倍額定力矩的阻力矩:8 300×2.5= 2.075×104N·M。
2×104N·M的阻力矩將對傳動鏈系統造成很大的沖擊。如果經常性地在額定負載情況下發生安全鏈斷開故障,會對齒輪箱齒面產生沖擊效應。影響齒輪箱齒面的壽命。風機的正常停機主要是靠葉片正常收槳到90°位置來實現的。在額定風速情況下,如果葉片沒有正常收槳到90°位置,單方面靠主軸剎車是剎不住的,即使剎住了,也會由于剎車片高溫磨損,摩擦系數下降,而重新超速飛車。因此,本文提出了一個優化剎車程序的方案:主控檢測到安全鏈斷開時,首先檢測發電機轉速,如果發電機轉速在1 000 r/min以下,立即投入主軸剎車;發電機轉速大于1 000 r/ min,延時10 s投入剎車。如果葉片快速收槳速度是6°/s,10 s可以收槳60°,以減少對傳動鏈系統的沖擊負載。
實際應用時,為確保可靠性,發電機轉速的測定,需要將主軸旋轉轉速、齒輪箱轉速、發電機轉速3個轉速同時作為評判條件;增加一個10 s延時繼電器作為硬件保護,時間一到,無條件立即剎車。以防止極端情況下,由于主控死機,安全鏈不動作的情況發生。
風機在停機狀態,進行故障檢修時,發電機轉速為零,安全鏈斷開后,則立即投入剎車,不影響風機的檢修操作,剎車效果和原來一樣。
6 風機安全鏈斷開故障的危害及分析處理
6.1風機安全鏈斷開故障的危害
6.1.1 主軸剎車一直處于剎車狀態,機艙禁止自動偏航
由于風機不能自動對準風向,大風期間,風向發生變化后,葉片將受側向風力影響產生轉動,又因為主軸剎車一直處于剎車狀態,將造成齒輪箱高速齒面一直持續產生打齒現象,造成齒輪箱齒面的損傷。若遇到北方冬季大雪封路的情況,由于安全鏈故障不能盡快解決,風機有可能3~5天一直處于齒輪箱齒面撞擊狀態。
6.1.2 必須人工到風機塔基復位
如果故障風機距離監控室較遠,來回路途就要1個多小時,如果故障不能及時準確排除,剛復位起機轉不到1~2 h又報故障,由于距離較遠,來回復位起機,將造成人力物力的浪費。
目前有一些國產的風機主控系統,設計為允許安全鏈遠程復位,雖然可以解決遠距離就地復位長途奔波問題,但也引發更嚴重的安全問題。例如某風場由于風機葉片沒有完全收槳,風機超速,安全鏈斷開,報緊急剎車程序200,雖然主軸剎車已經把主軸剎死,但監控室又通過遠程復位了安全鏈故障,風機又重新旋轉至超速緊急狀態,由于主軸剎車片已經嚴重磨損,最后風機超速倒機。
因此建議:
(1)如果允許遠程復位安全鏈故障,需要設計成遠程復位安全鏈故障必須輸入3把密碼鎖,由3個不同級別的人保管。確保風機不存在顛覆性故障情況下,允許復位。
(2)24 h內,只允許遠程復位2次。
小風情況下報安全鏈斷開故障,雖然暫時不會引起風機超速,但每次剎車200故障都激活葉片快速收槳,如果是超級電容作為緊急電源,最多收槳3次就沒有電了。遠程復位次數超過3次,也存在葉片不能完全收槳的可能,下次大風出現時可能引發超速倒機故障。
6.2風機安全鏈斷開故障的分析處理
風機安全鏈斷開故障一般與超速模塊動作有關。
風機超速模塊有3種:主軸超速模塊、齒輪箱超速模塊、發電機超速模塊。
如圖5所示,主軸超速模塊K.40.7、齒輪箱超速模塊K.40.9、2個帶電吸合干接點直接串聯在安全鏈回路,超速模塊動作時,安全鏈回路立即斷開,激活剎車程序200。發電機超速模塊K.40.5的接點沒有串聯到安全鏈回路里,當發電機超速模塊K.40.5動作時激活變槳自主運行,剎車程序52,不會直接斷開安全鏈。
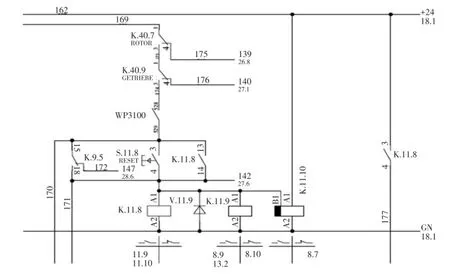
圖5 安全鏈觸發控制電路
風機安全鏈觸發故障時,如果是在沒有風或在小風情況下報超速模塊動作,一般是超速模塊接插件松動或超速模塊本身故障。還有一種情況是測速傳感器安裝位置離測速盤太近或太遠,或測速盤被潤滑油脂所覆蓋,如圖6、圖7所示。
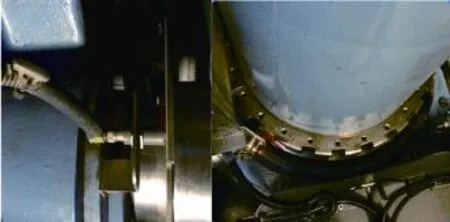
圖6 現場照片
如圖6所示,旋轉傳感器探頭與測速盤的間距要控制在2~3 mm范圍內,由于風機運行過程中的振動、機艙溫度的頻繁變化使測速探頭固定松動以及主軸剎車片剎車過程中產生的鐵粉會附著在探頭表面,因此需要定時清理和緊固探頭。
如圖7所示,主軸測速傳感器探頭與測速盤被油脂覆蓋,造成測速錯誤,低風速情況下,經常報主軸超速。把油脂清理干凈,主軸超速安全鏈故障得到解決。

圖7 現場照片
7 結束語
本文分析了安全鏈電路的構成,對風機安全鏈控制策略、安全鏈問題提出了一些優化改進建議。
[1]上海電氣風電設備有限公司.MITA-TEKNJk A/S WP3100控制器技術手冊[Z].2008.
[2]吳佳梁.風力機安裝、維護與故障診斷[M].北京:北京化學工業出版社,2011.
Analysis on Safety Chain Circuit of Wind Turbine and Discussion on Safety Control Strategy
Yang Xiongjie1,Xu Wenju2
(1.Dongfang Electric Wind Power Co.,Ltd.,Deyang Sichuan,618000; 2.Dongfang Electric(Jiuquan)New Energy Co.,Ltd.,Jiuquan Gansu,735000)
Safety chain of the wind turbine is the core control circuit of the wind turbine control system.It can monitor all ports of wind turbine safety control links in real-time,can ensure the security,reliablity and stability of the wind turbine.Taking MITA WP3100 master control system as an example,the wind turbine safety chain circuit is analyzed from the power safety chain,safety chain selflocking circuit,safety chain trigger and safety chain reset,which has a guidance on raising awareness of the safety chain circuit and troubleshooting,and proposes improvement ideas on the safety control strategy of wind turbine.
safety chain,overspeed module,MITA WP3100
TM614
A
1674-9987(2016)04-0064-06
10.13808/j.cnki.issn1674-9987.2016.04.014
楊雄杰 (1963-),男,電氣自動化專業高級工程師,東方風電主任工程師。主要從事風機現場調試、運維技術支持等工作,研究方向:風電機組主控、變槳、變頻技術優化。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39