行星排式混合動力汽車發(fā)動機(jī)轉(zhuǎn)速優(yōu)化研究
2017-01-16 02:25:57汪少華姚勇陳龍施德華
汽車工程學(xué)報(bào) 2016年5期
汪少華+姚勇+陳龍+施德華
摘要: 行星排式混合動力汽車具備發(fā)動機(jī)與路載解耦的特點(diǎn),在控制時(shí)需引入PI算法調(diào)節(jié)發(fā)動機(jī)轉(zhuǎn)速。對一種雙行星排式混合動力系統(tǒng)進(jìn)行研究,以提高車輛燃油經(jīng)濟(jì)性為目標(biāo),搭建了基于發(fā)動機(jī)最優(yōu)工作曲線的控制策略。通過分析發(fā)動機(jī)轉(zhuǎn)速,發(fā)現(xiàn)在傳統(tǒng)PI控制下,發(fā)動機(jī)速度不能良好地跟隨,存在波動現(xiàn)象,影響了整車燃油經(jīng)濟(jì)性。鑒于模糊算法的優(yōu)良特性,將模糊控制與傳統(tǒng)PI算法結(jié)合,實(shí)現(xiàn)PI參數(shù)在線修正。基于Cruise與Simulink平臺進(jìn)行了聯(lián)合仿真。結(jié)果表明,采用模糊PI控制后,發(fā)動機(jī)轉(zhuǎn)速跟隨及時(shí),有效消除了波動,電機(jī)MG1工作點(diǎn)也更為集中地分布在高效區(qū)域內(nèi),整車油耗在原有的節(jié)油表現(xiàn)基礎(chǔ)上又有了2.83%的提升。
關(guān)鍵詞:行星排 ;混合動力汽車;模糊PI;轉(zhuǎn)速優(yōu)化;Cruise;
中圖分類號:U464.22 文獻(xiàn)標(biāo)識碼:A
Research on Engine Speed Optimization for Planetary Gear Hybrid Electric Vehicle
WANG Shaohua,YAO Yong,CHEN Long, SHI Dehua
(School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,Jiangsu,China)
Abstract: Planetary gear hybrid electric vehicles have a distinct feature which is decoupling engine from the road load. In the meantime the PI algorithm was necessarily introduced to adjust the engine speed. In order to improve the fuel economy, the research is based on a dual-planetary hybrid system, setting up the engine optimal operation line control strategy. By analyzing the engine speed, the speed fluctuation was founded which is affecting the overall fuel economy. Considering the excellent trait of fuzzy algorithm, the paper combined fuzzy control and traditional PI algorithm to realize the PI parameters on-line correction. Then the co-simulation was carried out based on the Cruise and Simulink platform, the simulation results show that, with the help of the fuzzy PI control, the engine speed responses timely and effectively eliminates the speed fluctuation. Finally the MG1 operation points are more concentrated in high efficient area and the vehicle achieves a better fuel economy performance by 2.83% than the traditional PI control system.
Key words: planetary gear; hybrid electric vehicle; fuzzy PI; speed optimization; cruise
近些年,由能源短缺與環(huán)境污染帶來的問題日益突出,混合動力汽車因其優(yōu)良的經(jīng)濟(jì)性和排放性得到了政府和社會的認(rèn)可,成為了汽車發(fā)展的重要方向和研究熱點(diǎn)[1-2]。混聯(lián)式作為混合動力汽車中重要的分支,因其兼具串聯(lián)式與并聯(lián)式的優(yōu)良特性,在提升整車節(jié)油效果和降低車輛排放性能方面更具優(yōu)勢[3-4]。行星輪系作為混聯(lián)式車輛常用的一種優(yōu)良載體,可實(shí)現(xiàn)發(fā)動機(jī)與路載解耦,提高了發(fā)動機(jī)的控制靈活性,但同時(shí)需引入PI算法,從而實(shí)現(xiàn)各部件工作狀態(tài)的唯一。
基于不同的行星輪系結(jié)構(gòu),國內(nèi)的專家學(xué)者進(jìn)行了一系列的研究。北京理工大學(xué)的溫博軒、王偉達(dá)等[5]發(fā)現(xiàn)了發(fā)動機(jī)轉(zhuǎn)速存在偏離目標(biāo)轉(zhuǎn)速的現(xiàn)象,并分別采用了機(jī)電功率協(xié)調(diào)控制和電動功率協(xié)調(diào)控制兩種方式,輸出了一個調(diào)節(jié)系數(shù)用于調(diào)整發(fā)電機(jī)轉(zhuǎn)矩,最終解決發(fā)動機(jī)轉(zhuǎn)速跟隨問題,但該研究從機(jī)電轉(zhuǎn)矩控制匹配角度出發(fā),未考慮PI參數(shù)對系統(tǒng)動態(tài)的影響。上海華普汽車的王晨、張彤等[6]針對一種由拉維納行星輪系演變而來的雙行星排結(jié)構(gòu),從系統(tǒng)效率考慮,通過增加兩個制動器對動力系統(tǒng)進(jìn)行優(yōu)化,研究雖提出了引入PI控制調(diào)節(jié)發(fā)動機(jī)工作狀態(tài)的方法,但詳細(xì)的調(diào)節(jié)過程并未給出,且其研究重點(diǎn)為結(jié)構(gòu)設(shè)計(jì)優(yōu)化、驗(yàn)證和模式切換中的協(xié)調(diào)控制。中國汽車技術(shù)研究中心的史廣奎、孔治國等[7]基于CHS 結(jié)構(gòu),直接采用了發(fā)動機(jī)臺架調(diào)試的方法,得出了發(fā)動機(jī)最優(yōu)曲線下的各PI參數(shù),但其研究內(nèi)容缺乏前期的理論仿真驗(yàn)證。
在以往混合動力汽車能量管理方面的研究中,研究角度往往從全局出發(fā),僅考慮控制策略對車輛最終燃油性能的影響,而忽視了系統(tǒng)動態(tài)調(diào)節(jié)特性對降低整車油耗的潛力。尤其在行星排式混合動力汽車中,針對由于傳統(tǒng)PI調(diào)節(jié)不足而導(dǎo)致的發(fā)動機(jī)轉(zhuǎn)速波動的情況鮮有文獻(xiàn)涉及。
基于此,針對一種雙行星排式混合動力汽車,提出了一種基于模糊PI的發(fā)動機(jī)轉(zhuǎn)速優(yōu)化控制方法,將模糊算法與PI算法相結(jié)合,構(gòu)建了模糊PI控制器,克服傳統(tǒng)PI調(diào)試的不足,實(shí)現(xiàn)全區(qū)域內(nèi)PI參數(shù)的實(shí)時(shí)修正。最終通過Cruise與Simulink的聯(lián)合仿真,對比了模糊算法引入前后對發(fā)動機(jī)轉(zhuǎn)速的跟隨情況、電機(jī)工作點(diǎn)分布及整車油耗的表現(xiàn)。
1 系統(tǒng)結(jié)構(gòu)及運(yùn)動學(xué)、動力學(xué)分析
1.1系統(tǒng)結(jié)構(gòu)
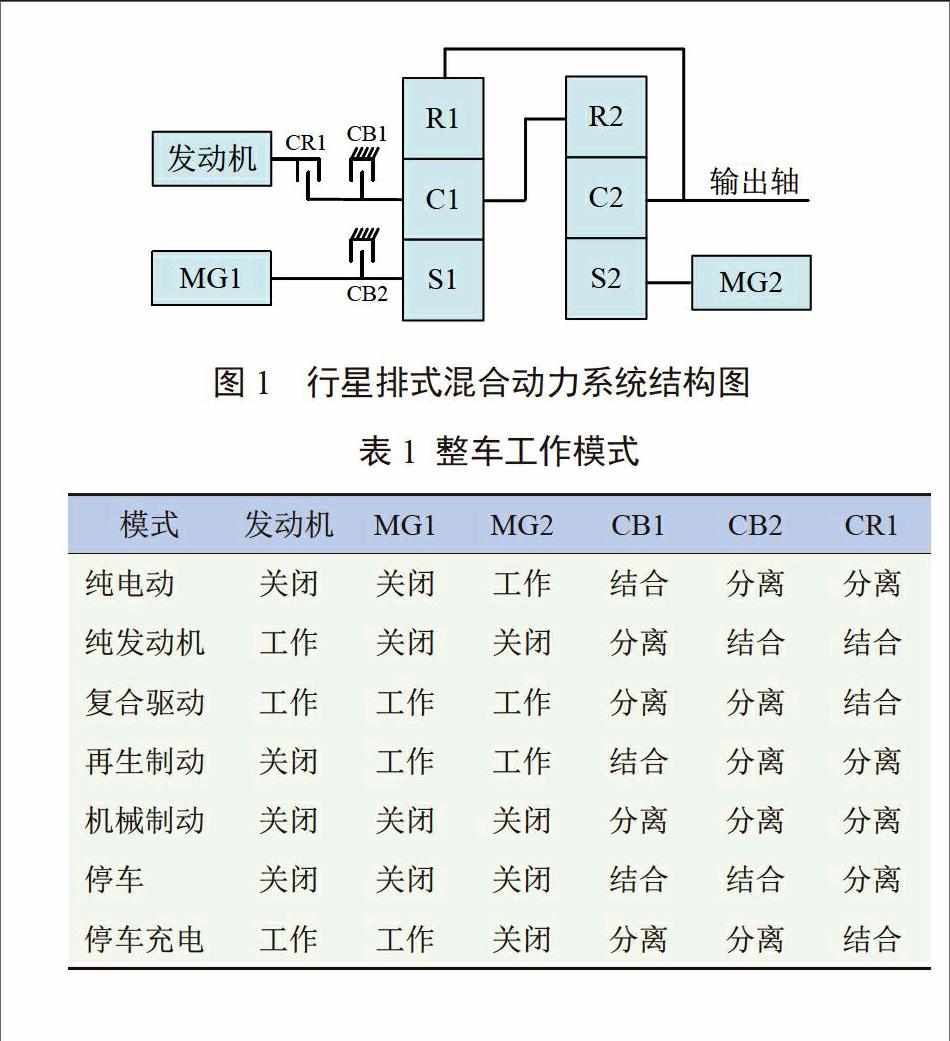
圖1為本研究的行星排式混合動力系統(tǒng)結(jié)構(gòu)圖,系統(tǒng)中發(fā)動機(jī)、電機(jī)MG1、MG2分別與前排行星架、前排太陽輪和后排太陽輪相連,前排行星架、齒圈與后排齒圈、行星架交叉相連,最終動力由后排行星架輸出。除了三個動力部件外,還包含了一個離合器和兩個制動器。離合器CR1能在適當(dāng)?shù)臅r(shí)間分離發(fā)動機(jī)與前排行星架,消除發(fā)動機(jī)轉(zhuǎn)動慣量對系統(tǒng)的影響。制動器CB1能在低速時(shí)鎖死前行星架,車輛以純電動模式運(yùn)行,保證系統(tǒng)在低速時(shí)的效率。制動器CB2實(shí)現(xiàn)高速時(shí)鎖死電機(jī)MG1,保證系統(tǒng)在高速時(shí)的效率,還可以實(shí)現(xiàn)發(fā)動機(jī)直驅(qū)模式。
1.2系統(tǒng)工作模式
根據(jù)系統(tǒng)中制動器、離合器的結(jié)合狀態(tài)及動力部件參與情況的不同,提取了如表1所示的整車工作模式。
1.3動力學(xué)、運(yùn)動學(xué)分析
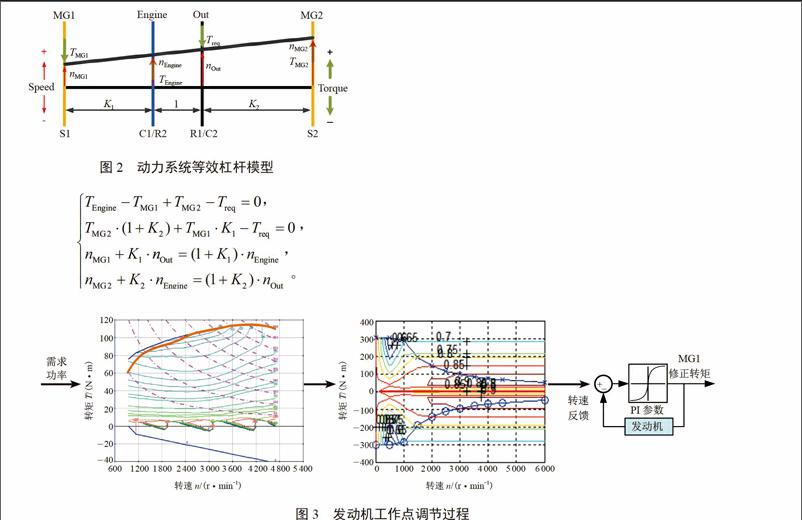
系統(tǒng)的等效杠桿模型如圖2所示,圖中TEngine、TMG1、TMG2分別為發(fā)動機(jī)、電機(jī)MG1、電機(jī)MG2作用在前排行星架、前排太陽輪、后排太陽輪上的轉(zhuǎn)矩,Treq為輸出軸處的需求轉(zhuǎn)矩,nEngine、nMG1、nMG2、nOut分別為發(fā)動機(jī)轉(zhuǎn)速、電機(jī)MG1轉(zhuǎn)速、電機(jī)MG2轉(zhuǎn)速和輸出軸處的轉(zhuǎn)速,K1、K2分別為前后兩行星排的特征參數(shù)。基于杠桿法[8]得出了方程組(1)所示的系統(tǒng)動力學(xué)、運(yùn)動學(xué)方程。
(1)
2 發(fā)動機(jī)最優(yōu)工作曲線實(shí)現(xiàn)原理及分析
2.1實(shí)現(xiàn)原理
由表1可知,在復(fù)合驅(qū)動模式下,發(fā)動機(jī)、電機(jī)MG1、MG2均參與工作。方程組(1)含有4個等式方程,其中Treq與nOut作為已知量,其余3組共6個變量TEngine與nEngine、TMG1與nMG1、TMG2與nMG2均為未知變量,因而方程組不能求解出唯一解,需要先確定某一組變量值。本研究以提高燃油經(jīng)濟(jì)性為首要目標(biāo),而發(fā)動機(jī)對控制目標(biāo)的影響最大,因此選擇發(fā)動機(jī)工作點(diǎn)為控制目標(biāo)。鑒于選用的仿真軟件Cruise中部件轉(zhuǎn)矩直接可控,對發(fā)動機(jī)轉(zhuǎn)速引入PI算法,理論上實(shí)現(xiàn)發(fā)動機(jī)最優(yōu)工作曲線。
發(fā)動機(jī)最優(yōu)工作曲線控制策略實(shí)現(xiàn)的過程為:根據(jù)整車需求功率查表,初步確定了發(fā)動機(jī)的理想工作點(diǎn),并經(jīng)過電機(jī)MG1、MG2轉(zhuǎn)速以及怠速等一系列條件約束后得出修正后的發(fā)動機(jī)工作點(diǎn)。即通過修正電機(jī)MG1轉(zhuǎn)矩達(dá)到調(diào)節(jié)發(fā)動機(jī)轉(zhuǎn)速的目的,圖3為帶約束過程的發(fā)動機(jī)工作點(diǎn)調(diào)節(jié)過程。
圖3 發(fā)動機(jī)工作點(diǎn)調(diào)節(jié)過程
由于實(shí)際工況中需求功率時(shí)刻變化,導(dǎo)致了發(fā)動機(jī)目標(biāo)工作點(diǎn)也是時(shí)變的,單一的PI參數(shù)已不能滿足系統(tǒng)調(diào)節(jié)特性,因此,在發(fā)動機(jī)最優(yōu)工作曲線控制策略中涉及到PI參數(shù)是一組數(shù)值。
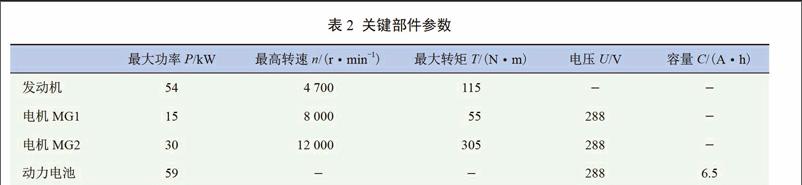
在Cruise和Simulink中分別建立了整車模型和發(fā)動機(jī)最優(yōu)工作曲線控制策略并進(jìn)行離線仿真。車輛的滿載質(zhì)量1 645 kg,迎風(fēng)面積1.746 m2,空氣阻力系數(shù)0.3,滾動阻力系數(shù)0.01,滾動半徑0.293 m,前后兩排行星排特征參數(shù)分別為1.842和2.48,其余動力系統(tǒng)部件參數(shù)見表2。
2.2發(fā)動機(jī)轉(zhuǎn)速分析
圖4為傳統(tǒng)PI控制下的發(fā)動機(jī)轉(zhuǎn)速情況。由圖可知,采用傳統(tǒng)PI控制的發(fā)動機(jī)在仿真工況的后半段,長時(shí)間持續(xù)性地加速需求下,轉(zhuǎn)速無法保證及時(shí)跟隨,存在較大波動,不利于整個系統(tǒng)的平穩(wěn)工作,直接影響整車油耗。
從PI參數(shù)合理性角度考慮,分析由于傳統(tǒng)PI參數(shù)獲取時(shí)僅對最優(yōu)工作曲線上每隔一個功率區(qū)間進(jìn)行標(biāo)定,對于區(qū)間內(nèi)工作點(diǎn)的控制參數(shù)采用線性差值的方法代替,并沒有直接獲取。這種方法雖簡化了PI參數(shù)的個數(shù),但無法保證差值出的PI參數(shù)在區(qū)間內(nèi)獲得良好的控制效果。
3基于模糊PI的發(fā)動機(jī)轉(zhuǎn)速優(yōu)化原理及實(shí)現(xiàn)
3.1優(yōu)化原理
模糊算法是一種基于非線性模糊數(shù)學(xué)理論的智能控制算法,通過模仿人類近似推理和綜合決策的思維,使受控對象具備強(qiáng)適應(yīng)性,具有較強(qiáng)的推廣前景和應(yīng)用價(jià)值錯誤!未找到引用源。。
以發(fā)動機(jī)實(shí)際轉(zhuǎn)速與目標(biāo)轉(zhuǎn)速的差值和此差值變化率作為系統(tǒng)輸入,借助模糊控制器糾正輸入量的偏差,實(shí)現(xiàn)了動態(tài)調(diào)節(jié)發(fā)動機(jī)最優(yōu)曲線上各工作點(diǎn)對應(yīng)PI參數(shù)的目的,使發(fā)動機(jī)轉(zhuǎn)速具有良好的動態(tài)跟隨特性。具體的優(yōu)化流程如圖5所示。
3.2模糊PI控制器
3.2.1模糊PI控制器結(jié)構(gòu)
基于上述優(yōu)化思想,在Simulink軟件中搭建了模糊PI控制器,如圖6所示,系統(tǒng)為雙輸入雙輸出結(jié)構(gòu)。圖中,比例系數(shù)和積分系數(shù)均由兩部分組成,基準(zhǔn)的PI值與系統(tǒng)輸出的修正后PI值相加組成了新的PI參數(shù),最終實(shí)現(xiàn)修正電機(jī)MG1的轉(zhuǎn)矩。增益Ke、Kec為兩個輸入量的量化因子,數(shù)值均為2。
3.2.2輸入、輸出量的量化
進(jìn)一步將差值E分為5個模糊子集:{NB、NS、ZO、PS、PB},論域定為[-50,50];差值變化率EC分為5個模糊子集:{NB、NS、ZO、PS、PB},論域定為[-50,50];ΔKp分為5個模糊子集:{NB、NS、ZO、PS、PB},論域定為[-1,1];ΔKi分為5個模糊子集:{NB、NS、ZO、PS、PB},論域定為[-1,1]。
根據(jù)相關(guān)文獻(xiàn)分析結(jié)果和仿真經(jīng)驗(yàn)錯誤!未找到引用源。,輸入和輸出變量隸屬度函數(shù)如圖7所示,推理方法采用Mamdani型,去模糊化采用加權(quán)平均法。
3.2.3模糊控制規(guī)則的制定
由相關(guān)文獻(xiàn)[8]可知,比例系數(shù)和積分系數(shù)有著不同的調(diào)節(jié)作用。比例系數(shù)用于提高系統(tǒng)響應(yīng)速度,其數(shù)值越大,系統(tǒng)響應(yīng)速度越快,但容易出現(xiàn)超調(diào),嚴(yán)重的會導(dǎo)致系統(tǒng)失穩(wěn)。反之,系統(tǒng)響應(yīng)速度減小,調(diào)節(jié)時(shí)間變長,系統(tǒng)動態(tài)性能減弱。積分系數(shù)用于消除穩(wěn)態(tài)誤差,其數(shù)值越大,誤差消除越快,但容易在響應(yīng)初期就出現(xiàn)積分飽和現(xiàn)象。反之,穩(wěn)態(tài)誤差難以消除,影響系統(tǒng)調(diào)節(jié)精度。
基于上述經(jīng)驗(yàn),以快速有效獲得相應(yīng)的PI參數(shù)為前提,確保發(fā)動機(jī)在盡可能短的時(shí)間內(nèi)跟隨期望的轉(zhuǎn)速,有效實(shí)現(xiàn)系統(tǒng)的平穩(wěn)工作,從而進(jìn)一步降低車輛的油耗。本研究設(shè)計(jì)的模糊控制器控制規(guī)則見表3和表4。
為了驗(yàn)證模糊PI控制效果,在保持原有仿真設(shè)置不變的基礎(chǔ)上,對控制策略做出如圖6所示的修改并再次進(jìn)行聯(lián)合仿真。
圖8為模糊PI控制下的發(fā)動機(jī)轉(zhuǎn)速情況。通過觀察發(fā)現(xiàn),由于兩次仿真采用了相同的邏輯門限控制規(guī)則,模糊算法引入前后,發(fā)動機(jī)的工作時(shí)刻基本沒有變化。但由局部放大圖可知,采用模糊PI控制的發(fā)動機(jī)轉(zhuǎn)速跟隨及時(shí),尤其是在仿真工況的后半段,長時(shí)間持續(xù)性的加速需求下,發(fā)動機(jī)轉(zhuǎn)速時(shí)刻跟隨,有效地消除了波動,驗(yàn)證了引入模糊控制的有效性,實(shí)現(xiàn)了發(fā)動機(jī)轉(zhuǎn)速精確控制。
圖9為電機(jī)MG1工作點(diǎn)的分布情況。由圖可知,在傳統(tǒng)PI控制下,電機(jī)MG1的工作點(diǎn)分布較為離散,且較多地分布在效率較低的區(qū)域內(nèi)。分析原因,是由于發(fā)動機(jī)的實(shí)際轉(zhuǎn)速不能較好地實(shí)時(shí)跟隨期望轉(zhuǎn)速,導(dǎo)致了電機(jī)MG1的PI修正轉(zhuǎn)矩存在較大的波動。而在采用模糊PI控制后,電機(jī)MG1工作點(diǎn)分布在效率較高的區(qū)間內(nèi),有利于系統(tǒng)效率的提升。
圖10對比了傳統(tǒng)PI和模糊PI兩種控制算法下的電池SOC變化情況。SOC初始值均為0.65,傳統(tǒng)PI控制下,SOC終了值為0.562,而模糊PI控制下,SOC終了值為0.623。在引入模糊控制后,循環(huán)工況的后半段中發(fā)動機(jī)轉(zhuǎn)速及時(shí)跟隨,有效穩(wěn)定了電機(jī)工作狀態(tài),使SOC下降更小。
仿真結(jié)果數(shù)據(jù)如表5所示,其中發(fā)動機(jī)油耗提升較小,這是由于引入的PI算法只對發(fā)動機(jī)的轉(zhuǎn)速波動有修正作用,并不改變其工作點(diǎn)分布。但相比傳統(tǒng)PI控制,模糊PI控制在原有的節(jié)油表現(xiàn)基礎(chǔ)上又有了2.83%的改善,實(shí)現(xiàn)了車輛油耗的進(jìn)一步降低。
5 結(jié)論
(1)鑒于發(fā)動機(jī)與路載解耦特性,引入了傳統(tǒng)PI算法,通過Cruise與Simulink聯(lián)合仿真實(shí)現(xiàn)了發(fā)動機(jī)最優(yōu)工作曲線控制策略。分析發(fā)動機(jī)轉(zhuǎn)速跟隨情況,發(fā)現(xiàn)存在波動現(xiàn)象,推測可能是由PI參數(shù)合理性而導(dǎo)致。基于此,引入模糊控制,構(gòu)建了模糊PI控制器,實(shí)現(xiàn)PI參數(shù)的在線修正。
(2)通過再次聯(lián)合仿真,對比模糊算法引入前后的仿真結(jié)果,可知在車輛長時(shí)間持續(xù)性大功率需求下,發(fā)動機(jī)轉(zhuǎn)速能夠時(shí)刻跟隨,有效地消除了波動,促成了電機(jī)MG1的工作點(diǎn)較為密集地分布在高效率區(qū)域內(nèi),而電池SOC也直觀地反映了電機(jī)效率提升帶來的系統(tǒng)油耗的降低,最終整車油耗相比傳統(tǒng)PI控制降低了2.83%。
參 考 文 獻(xiàn)
[1] AL-ALAWI B M, BRADLEY T H. Review of Hybrid, Plug-in Hybrid, and Electric Vehicle Market Modeling Studies[J]. Renewable and Sustainable Energy Reviews, 2013, 21(5): 190-203.
[2] ZHANG S, XIONG R. Adaptive Energy Management of a Plug-in Hybrid Electric Vehicle Based on Driving Pattern Recognition and Dynamic Programming[J].Applied Energy, 2015, 155:68-78.
[3] SABRI M F M, DANAPALASINGAM K A, RAHMAt M F. A Review on Hybrid Electric Vehicles Architecture and Energy Management Strategies[J]. Renewable and Sustainable Energy Reviews, 2016, 53: 1433-1442.
[4] ZOU Y, LIU T, SUN F, et al. Comparative Study of Dynamic Programming and Pontryagins Minimum Principle on Energy Management for a Parallel Hybrid Electric Vehicle[J]. Energies, 2013, 6(4): 2305-2318.
[5] 溫博軒, 王偉達(dá), 項(xiàng)昌樂, 等.混聯(lián)式混合動力系統(tǒng)動態(tài)響應(yīng)協(xié)調(diào)控制[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2016,48(1):72-79.
WEN Boxuan, WANG Weida, XIANG Changle, et al. Torque Coordinated Control for the Multi Power in Parallel-Series HEV[J].Journal of Harbin Institute of Technology, 2016,48(1):72-79.(in Chinese)
[6] 趙治國, 王晨, 張彤, 等.復(fù)合功率分流變速器的設(shè)計(jì)與驗(yàn)證[J]. 汽車工程, 2015,37(4):407-415.
ZHAO Zhiguo, WANG Chen, ZHANG Tong, et al. Design and Validation of a Compound Power-Split Transmission[J]. Automotive Engineering, 2015,37(4):407-415.(in Chinese)
[7] KONG Z, SHI G, WANG W, et al. Development of Electric Control System for a Novel Full Hybrid SUV[C]// Power Electronics and Motion Control Conference. IEEE, 2012:631-635.
[8] BENFORD H L,LEISING M B. The Lever Analogy: a New Tool in Transmission Analysis[C]// SAE Technical Paper,810102, 1981.
[9] SCHOUTEN N J, SALMAN M A, KHEIR N A. Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic[J].Control Engineering Practice, 2003, 11(2):171-177.
[10] SYED F U, HAO Y, MING K, et al. Rule-Based Fuzzy Gain-Scheduling PI Controller to Improve Engine Speed and Power Behavior in a Power-Split Hybrid Electric Vehicle[C]//Nafips Meeting of the NAFIPS, 2006:284-289.
[11] KHAN M, KAR N C. Speed Tracking Performance of Fuzzy Based Vector Control of Induction Motor Drives for Hybrid Electric Vehicles[C]//Conference on Electrical & Computer Engineering,2008:607-610.
修改說明:
針對專家提出的圖3不夠清晰。已向編輯部進(jìn)行說明,此圖為示意圖,圖中發(fā)動機(jī)最優(yōu)工作曲線和電機(jī)外特性限制顯示內(nèi)容不是重點(diǎn)。并且已將兩個曲線的原圖附在論文后面。
發(fā)動機(jī)最優(yōu)工作曲線
電機(jī)MG2外特性曲線
作者簡介:
責(zé)任作者:汪少華(1978-),男,江蘇泰興人。副教授,碩士生導(dǎo)師,主要研究方向?yàn)榛旌蟿恿囕v動力系統(tǒng)設(shè)計(jì)與控制。
Tel:13952801115
E-mail:13514462@qq.com
通訊作者:姚勇(1991-),男,江蘇啟東人。碩士研究生,主要研究方向?yàn)榛旌蟿恿囕v動力系統(tǒng)設(shè)計(jì)與控制。
Tel:18317091882
E-mail:wozhu617@126.com