無人駕駛小車定點追蹤系統的設計與實現
2017-01-17 19:50:08陳亮亮劉玉瑩詹春
軟件工程 2016年11期
陳亮亮+劉玉瑩+詹春

摘 要:為了更好的解決無人車定點追蹤的問題,本文提出了一種基于OpenCL的圖像追蹤算法。特定目標物的檢測和連續跟蹤技術是目前計算機視覺領域的前沿方向和熱點研究[1]。本設計是將OpenCV中的CamShift算法移植到DE1-SoC開發板的OpenCL平臺上。整個設計分為五個模塊:視頻模塊、音頻模塊、超聲波測距模塊、藍牙音箱驅動模塊和算法移植模塊。最終小車能夠實現定點追蹤固定目標物,且在目標物的正前方10cm處停下同時外接藍牙音箱響起樂曲。
關鍵詞:OpenCV;定點追蹤;OpenCL;計算機視覺
中圖分類號:TP391.4 文獻標識碼:A
1 引言(Introduction)
特定目標物的檢測和連續跟蹤技術是目前計算機視覺領域的前沿方向和熱點研究,因為其融合多學科的先進技術,在諸多行業廣泛使用,更因為因其背后蘊藏著巨大的經濟效益和商機,引起諸多科研機構、學術界和企業界的關注。當前很多的科研機構、企業都在該領域投入了大量精力進行研究和探索,取得了豐碩成果[2]。本設計是將OpenCV中的CamShift算法移植到DE1-SoC開發板的OpenCL上,根據鼠標框選區域的色度光譜來進行固定目標物的跟蹤。
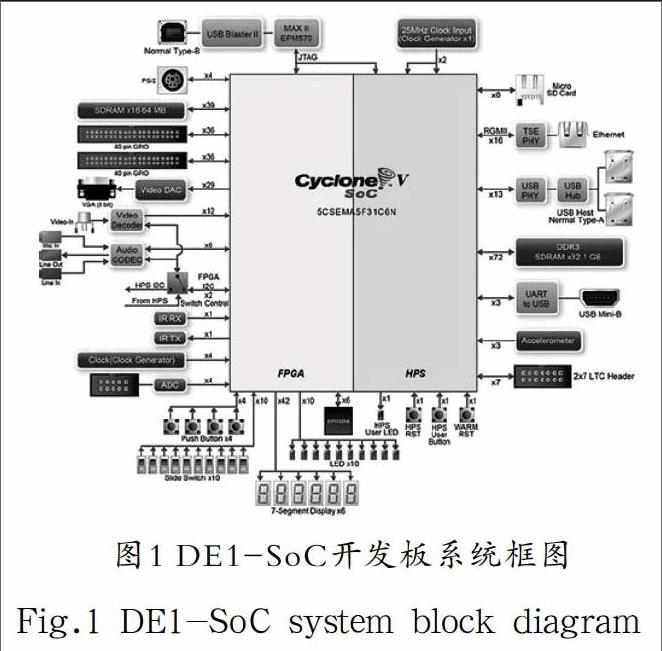
本設計選擇了友晶科技提供的DE1-SoC開發板,這款開發板是Altera Cyclone V SoC的專用平臺[3]。隨著FPGA技術的高速發展,芯片規模不斷提升,帶來了更強的性能的同時,也實現了更低的功耗[4,5]。FPGA憑借其強大的并行信號處理能力,在應對控制復雜度低、數據量大的運算時具有較強的優勢[6]。但是在復雜算法的實現上,FPGA卻遠沒有32位精簡指令集計算機(RISC)處理器靈活方便,所以在設計具有復雜算法和控制邏輯的系統時,往往需要RISC和FPGA結合使用[7]。這樣電路設計的難度也就相應地增加。而Altera的Cyclone V SoC將RISC硬核處理器系統和FPGA集成到一起實現了功能的互補,大大減小了硬件電路復雜性和體積,同時也降低了功耗,提高了系統可靠性[8]。
DE1-SoC開發板提供了板載USB Blaster II JTAG在線調試功能、SD卡啟動、HPS享1GB DDR3內存、FPGA享64MB SDRAM內存、VGA高清顯示、ADC采樣、10/100/1000M以太網、USBx2接口、FPGA擴展等豐富的擴展接口和硬件資源。DE1-SoC開發板系統框圖如圖1所示[9]。
本設計實現的具體功能如下:
在小車車頭位置固定一個車載高清攝像頭,讀取車正前方可視角大約170°的圖像,與存在FPGA的SDRAM中的基準圖像進行比較,這里我們選取的基準圖像為鼠標在顯示屏上框選的480*480的白色區域。首先,攝像頭取得480*480的圖像存儲在SDRAM中,然后檢測圖像的中線位置上是否有白色區域。若是在中線位置沒有白色區域,則車頭左右擺動微小的角度來定位白色區域。若是中線位置有白色區域,發送一個控制信號給FPGA,驅動小車直行。若是白色區域在中線位置的左側,發送一個控制信號給FPGA,控制小車左轉。若是白色區域在中線位置的右側,發送一個控制信號給FPGA,控制小車右轉。為防止小車與白色固定目標物相碰撞,我們應用了HC-SR04超聲波模塊來控制小車與目標物之間至少保持10cm的安全距離,當距離到了10cm時超聲波模塊會返回一個控制信號給FPGA,這時小車停止運動,同時啟動音頻模塊,響起音樂。
2 系統實現原理(System realization principle)
整個系統分為五個模塊:視頻模塊、音頻模塊、超聲波測距模塊、藍牙音箱驅動模塊和圖像算法移植模塊。整體設計結構如圖2所示。
其中,音頻模塊、視頻模塊和超聲波測距模塊由FPGA部分控制,藍牙音箱驅動模塊和圖像算法移植模塊由ARM部分控制。下面將詳細分析各個子模塊的實現原理。
2.1 視頻模塊
在DE1-SoC開發板上提供了一塊視頻解碼芯片ADV7180,此塊解碼芯片是受I2C總線協議的控制[10]。視頻顯示原理如圖3所示。
首先通過TD_Detect檢測模塊檢測外部圖像,并選擇合適的視頻制式,如圖4所示,默認視頻制式為NTSC。
其次將采集到的圖像經過ITU_656_Decoder解碼生成YCbCr的圖像格式,如圖5所示。
接下來將解碼出來的YCbCr信號隔行寫入到SDRAM中,并且通過SDRAM隔行讀出來,如圖6所示。
最后通過下面三個模塊,將存儲在SDRAM中的YCbCr的信號先轉換為4:4:4的圖像格式,再轉換為RGB圖像格式,通過VGA接口顯示在屏幕上,如圖7所示。
2.2 音頻模塊
在DE1-SoC開發板上提供了一塊24位的音頻解碼芯片WM8731,此芯片支持麥克風line-in和line-out。WM8731也受I2C總線協議控制[11]。音頻模塊實現原理如圖8所示。
其中,核心模塊為子模塊HIGH,是用來存放音頻文件的,我們存放的是《我和你》樂曲的音頻。
2.3 超聲波測距模塊
測距模塊是利用超聲波模塊HC-SR04,它有VCC、GND、Trig、Echo四個管腳,只要給Trig一個大于10μs的高電平,在Echo端口接收到的高電平時間就是此次測距的時間,其測距公式:s=t*340/2,我們可以設置其高電平的時間來設置其距離。超聲波測距模塊實現原理如圖9所示。
2.4 藍牙音箱驅動模塊
我們使用USB的外部擴展,在DE1-SoC開發板上安裝藍牙音箱的發送端,然后在Linux系統上與我們的藍牙音響連接,從而實現音頻信號的放大。藍牙音箱驅動模塊軟件流程如圖10所示[12]。
2.5 圖像算法移植模塊
我們利用一個人臉掃描的算法原理來掃描攝像頭掃描到圖像的顏色,將OpenCV中的CamShift算法(連續自適應的MeanShift算法)移植到DE1-SoC開發板上的OpenCL上,根據鼠標框選區域的色度光譜來進行攝像頭讀入的視頻目標的追蹤,對白色目標物進行定位追蹤[11]。圖像算法移植模塊軟件流程如圖11所示[10]。
3 系統測試(System testing)
將五個子模塊整合在一起,構成了一個完整的智能小車定點追蹤系統,整體聯調的效果圖如圖12和圖13所示。
4 結論(Conclusion)
(1)在DE1-SoC開發板上運行Linux,我們首先需要設定串口終端,把開發板連接在電腦上,然后找到相應的外接裝置。執行putty.exe來選擇Serial來進行串口通信,進行保存后就可以關閉此窗口。接著是制作microSD card Image,下載好image file后使用win32DiskImager.exe來把Linux image刻錄到SD內,在開發板上電后,打開putty.exe,當系統boot起來后輸入root并按下enter就可以登入系統。
(2)在DE1-SoC開發板上實現ARM/HPS到FPGA的通信。首先我們需要先搭建一個Qsys硬件系統;然后需要寫一個完成相應功能的C語言代碼(主要是結合開發板完成地址的映射和寄存器配置及功能實現),我們主要是寫了一個可控制小車左轉、右轉,以及前進后退的控制程序;其次是創建Makefile文件,制定編譯工程的一系列規則(可根據案例把文件名和地址改為自己的文件名和地址即可);最后打開embedded文件中的Embedded_Command_Shell.bat,輸入cd切換路徑,然后輸入自己的文件位置,輸入make即可在原文件中生成一個空白文檔形式的可執行文件。打開Putty.exe就可以,用u盤把生成的可執行文件拷入優盤,然后把開發板上電,輸入相應的命令把此文件存入Linux路徑下的root即可。然后在Quartus中下載FPGA硬件sof文件,最后在串口終端輸入“./+生成的文件名即可”。我們主要用ARM控制FPGA的GPIO口。
(3)在DE1-SoC開發板上提供了一塊視頻解碼芯片ADV7180,此塊解碼芯片是基于I2C總線協議的傳輸。當外置攝像頭掃描到物體時首先會生成YCbCr格式的圖像,然后存入SDRAM,接著Ycbcr格式通過解碼生成RGB格式,通過VGA接口在顯示屏上顯示圖像。
(4)在DE1-SoC開發板上提供了一塊24位的音頻解碼芯片WM8731,此塊解碼芯片是基于I2C總線協議的傳輸。通過鎖相環分頻后,控制聲音模塊,將固定樂曲的音調用MIF Maker生成MIF文件存入ROM中,在數碼管上顯示樂譜,通過外置藍牙音箱進行聲音放大。
(5)硬件小車模塊主要是通過L298模塊來驅動直流電機控制小車模塊的移動,通過FPGA端口的GPIO口的控制信號來給小車移動的相應信號。電源主要采用電池給開發板供電,然后通過降壓后又給電機以及相應模塊供電。
參考文獻(References)
[1] Lazaro J L,Garci J C,Mazo M.Distributed Architecture for Control and Path Planning of Autonomous Vehicles,2001(03):112-116.
[2] Liu Wanli,Wang Zhankui,Zhu Hua.Novel Method of Trajectory Tracking and Posture Stabilization for Mobile Robot[S.I.].IEEE Press,2010.
[3] Regional objects based image retrieval[A].Proceedings of the 2011 Chinese Control and Decision Conference(CCDC),2011.
[4] 何燚,張翼飛.基于雙目視覺的移動機器人避障算法仿真研究[J].計算機仿真,2013(02):21-24.
[5] 汪明磊.智能車輛自主導航中避障路徑規劃與跟蹤控制研究[D].合肥工業大學,2013.
[6] 武麗.基于圖像傳感器的黑線提取及抗干擾算法研究[J].電子技術應用,2012(02):11-13.
[7] 崔瑾娟.移動機器人路徑規劃技術現狀與展望[J].安陽師范學院學報,2013(02):11-15.
[8] 胡永仕,張陽.基于遺傳模糊算法的智能車輛避障路徑規劃研究[J].福州大學學報(自然科學版),2015(02):16-20.
[9] 阮曉芳.多路超聲波機器人的模糊避障研究[J].計算機測量與控制,2012(12):51-53.
[10] 友晶科技.Altera DE1-SoC培訓教材[M].友晶科技,2002.
[11] 毛星云,冷雪飛.OpenCV3編程入門[M].電子工業出版社,2015.
[12] 張茜.智能車輛的軌跡跟蹤控制方法研究[D].哈爾濱工業大學,2015.
作者簡介:
陳亮亮(1982-),女,碩士,講師.研究領域:信息處理,微電子技術應用.
劉玉瑩(1972-),女,碩士,副教授.研究領域:信息處理.
詹 春(1975-),女,碩士,副教授.研究領域:信息處理.
