單聲束周向旋轉掃描探測技術
2017-02-09 01:52:05孟凡達馬少杰朱海洋
兵器裝備工程學報 2017年1期
關鍵詞:信號
孟凡達,馬少杰,朱海洋
(南京理工大學 智能彈藥技術國防重點學科實驗室,南京 210094)
【光學工程與電子技術】
單聲束周向旋轉掃描探測技術
孟凡達,馬少杰,朱海洋
(南京理工大學 智能彈藥技術國防重點學科實驗室,南京 210094)
針對陣列式超聲探測系統空間限制和固有盲區的問題,提出了一種新型的超聲波周向掃描方案。設計了可以實現調節聲波信號發射角度和轉速旋轉掃描機構,該結構簡單可靠。對超聲波聲場進行仿真,使用具有增強聲場和指向性的超聲傳感器。在同步掃描系統的基礎上,對單聲束探測目標車輛信息、回波信號和脈沖頻率與轉速匹配關系進行數值仿真分析,確定信號脈沖頻率與電機掃描轉速的最佳匹配參數。使用原理樣機進行掃描探測實驗,結果表明:當超聲脈沖頻率f≥27 Hz,周向掃描轉速范圍n=233 r/min,周向掃描探測系統能捕獲速度低于70 km/h的目標車輛,同時驗證了超聲波周向掃描探測可行性,為單束超聲周向探測系統設計提供依據。
單聲束;超聲探測;掃描機構;周向;最佳頻率與轉速
聲/超聲復合探測體制,以被動聲信號作為預警,用超聲波測距技術進行目標方位與距離識別[1-2]。這種復合探測模式多用于智能雷系統。超聲波主動探測需要采用全向探測體制提高超聲波探測到目標的概率,實現對周圍大視場的監控。
針對全向探測的問題,朱海洋等[3]建立了低功耗聲/超聲復合傳感器節點設計,采用陣列式實現了全向探測,該方法存在空間和能耗限制問題;甘霖等[4]利用有向傳感器以旋轉掃描的方式建立了激光周向探測的模型;查冰婷等[5]人利用有向傳感器旋轉掃描的方式進行全向感知,并研究了脈沖頻率和掃描轉速的匹配關系。旋轉掃描探測的方式多用于激光和毫米波探測,且激光、無線電波的旋轉掃描系統已經得到應用,但是基于超聲波的旋轉掃描系統方法理論還未完善。
本研究在設計單束超聲波周向探測機構的基礎上,建立了單聲束掃描探測的數學模型,分析了超聲發射頻率和周向掃描速度對探測目標車輛的影響,確定了最佳頻率和脈沖,并進行了實驗驗證。
1 周向旋轉掃描系統方案設計
1.1 傳感器空間布置方案
大視場探測布局方式包括多輻射方案和分區方案。多輻射方案中采用多個收發一體的換能器形成探測場;分區方案相對于多輻射方案,所需換能器數量少,但是需要單個換能器增大輻射區域。除此之外還有分區掃描方案,需要多個傳感器和旋轉掃描系統。輻射方案和分區方案都需要采用幾個甚至多個傳感器,增加內部噪聲,對系統空間要求較大。全向探測空間布局方式如圖1所示。

圖1 全向探測空間布局方式
現提出僅采用一個超聲波換能器實現360°的周向旋轉掃描探測方案。將傳感器數量減少到最少,并可以保證對智能雷周圍6 m范圍內進行有效探測。
1.2 周向掃描系統的組成原理
從智能雷的發展趨勢看復合探測手段有聲/紅外復合體制和另一種為聲/毫米波復合體制。聲/超聲復合探測體制是以被動聲信號作為預警,用超聲波測距技術進行目標方位與距離識別。聲/超聲復合探測系統結構如圖2所示。

圖2 聲/超聲復合探測系統
超聲波主動探測周向掃描系統采用同步掃描方案,系統包括超聲波換能器(發射電路,接收電路)、機械掃描結構(包括電機、轉子和旋轉件)和電機驅動器(包括控制電路和調速模塊)。周向掃描系統組成原理如圖3所示。
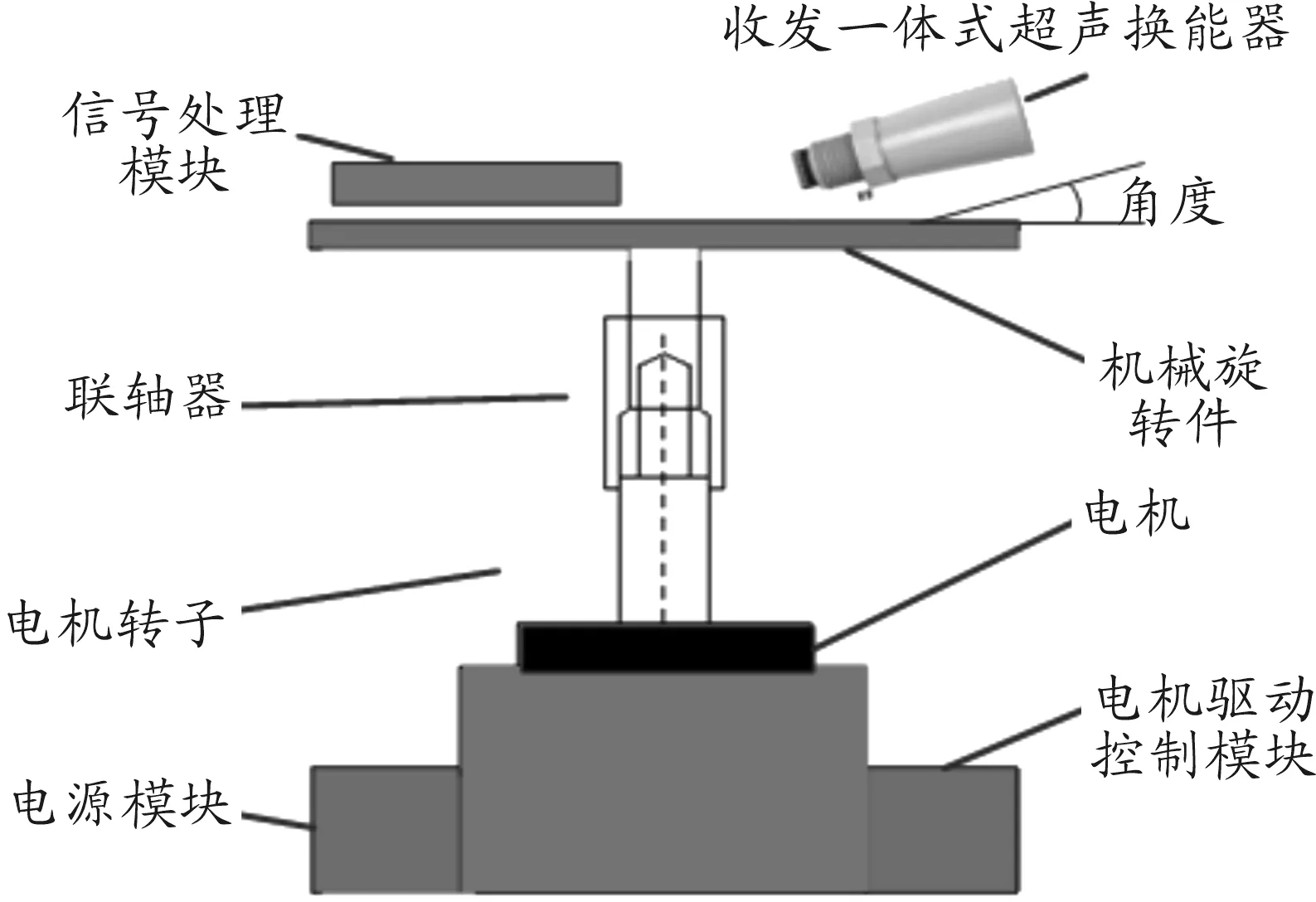
圖3 系統組成原理圖
整個掃描系統主要由電機、超聲波換能器和旋轉支架部件組成。旋轉支架各個部件加工難度小,聯接關系簡單可靠,在實現同步掃描方案功能的同時,簡化了系統結構,使單束超聲波周向探測方案成為可能,為掃描系統提供機械結構上的支持。周向掃描系統工作流程如圖4所示。

圖4 周向掃描系統工作流程
該系統的工作過程為:在智能雷預警系統(被動聲探測),當目標由遠及近靠近節點時,信號采集到的有效信號幅值由小變大,信號達到設定閾值時,到達主動探測范圍,給出信號喚醒特定節點主動探測系統。由控制系統發出主動探測信號,給電機和超聲波模塊通電,在驅動器和調速器的共同作用下,達到與超聲波脈沖相匹配的轉速,超聲波換能器發出聲波對周圍6 m進行探測,當超聲波換能器收到回波信號,將信號發回信號處理模塊進行處理;完成對空間360°大視場的周向旋轉探測。
2 超聲波傳感器的選擇
超聲波相比于20~20 000 Hz的聲音信號,具有較好的束射性。但是超聲波的振幅隨著距離的增加呈指數形式衰減,且頻率越大,衰減越嚴重[6-7]。綜合探測距離和價格因素考慮,擬選用工作頻率為40 kHz。目前普遍采用圓形的壓電晶體作為超聲波的發射與接收單元,因此超聲波探頭可以看成是圓形活塞的輻射源。根據惠更斯原理,任何復雜聲源可以看作是許多點聲源的組合。半徑為a的圓形活塞式超聲波發射探頭,聲場計算式為
(1)
式中:ω表示聲源振動的角頻率;ρ為介質密度;a為探頭半徑;ua為聲源振動時的速度振幅;k=2π/λ為波數;λ為波長;J1為一階貝塞爾函數;r和θ分別表示待測點到探頭的距離和方位角。
根據上述超聲波傳感器模型,建立超聲波發射聲場仿真模型。在COMSOL中建立的超聲波發射聲場模型,設置空氣域周圍完美匹配層,使邊界無反射,通過仿真,共振頻率為40 kHz 的超聲波換能器發射聲場分布如圖5所示。

圖5 超聲波傳感器發射聲場
圖5中的colorbar表示聲壓級,單位為dB。由圖5可以看出,該超聲波傳感器產生的聲束具有一定的指向性,但隨著距離的增加逐漸衰減,因此采用號筒增強聲強和指向性。綜上超聲波傳感器應選擇頻率為40 kHz,具有號筒的超聲波傳感器[8-10]。
3 掃描系統參數的選取
3.1 單聲束探測目標車輛模型分析
掃描探測系統在空間上形成360°大視場的探測范圍,使用增加號筒的超聲波換能器波束角較小,可將聲束簡化為一條直線。單束超聲波進行探測,系統受到回波信號后,目標車輛必須處于有效的攻擊范圍內。單聲束探測目標模型如圖6所示。
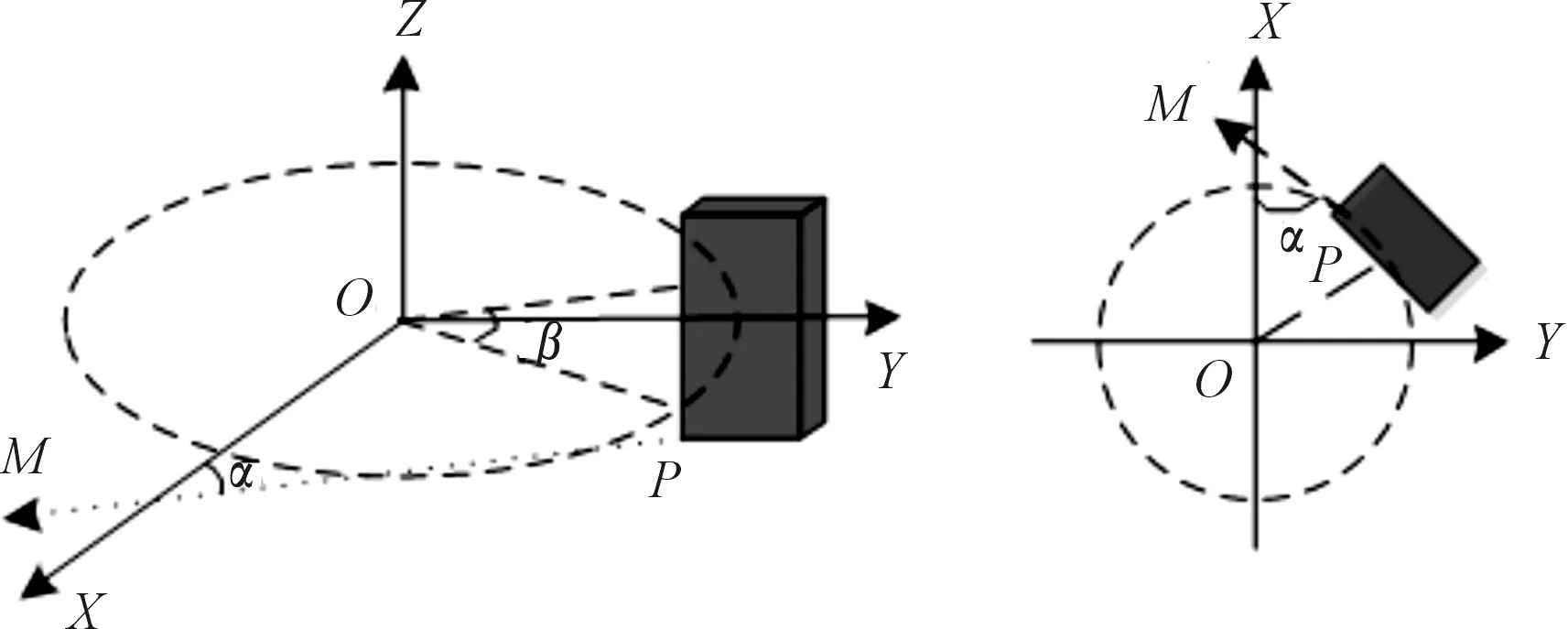
圖6 單聲束探測目標模型
圖6中O點為超聲換能器所在的位置,以旋轉掃描的方式向周圍進行探測。設超聲探測信號與地面間的夾角為β,顯然β為號筒夾角的一半。目標在水平面內沿PM方向以速度v移動,PM與X軸之間的夾角記為α。
傳感器以脈沖方式進行工作,脈沖發送間隔時間取決于系統所要求的最大探測距離d(6 m)。因此可以估算出有效范圍最佳的脈沖間隔發送時間:T=2d/343cosβ。最有可能丟失信號情況:目標車輛只經過一條超聲波探測聲束且剛好經過探測邊界的P點時,換能器處于發射下一列脈沖起始時刻。
假設目標車輛到達P1點時,換能器發射信號并且與車輛目標相匯,時間間隔內目標移動到達P1點,探測信號在目標上的點到地面距離為h,掃描半徑記為r,O點與P1之間的距離記為L
(2)
則超聲波換能器目標上返回到接收回波信號的時間為
(3)
式中取c常溫空氣中的傳播速度為343 m/s。此時換能器收到回波信號,目標車輛移動到下一個點P2的距離為S2=vt2,根據運動過程可知t1≥t2。為保證探測完成后目標仍處于有效的攻擊范圍內,需要滿足車身長度l≥S1+S2,對于戰地坦克數據為:行駛速度約65 km/h,車身高約為4 m,車身長度約5.0 m,由條件可知如下關系式
(4)
得出t1+t2≤0.055 s,求得坦克車輛行駛距離約1.0 m,小于車身長度。掃描系統可以對目標車輛進行有效探測。
3.2 回波信號與轉速的匹配
單束超聲波周向探測方案采用上文設計平臺進行旋轉掃描探測。掃描方法會導致探測區域出現周期性的探測盲區:掃描速度過慢,無法完成對探測區域的檢測;掃描速度過快,導致探測距離縮短或者是無法接收到超聲回波。當掃描轉速與脈沖頻率相當,才能有效地減小周期性探測盲區對探測性能的影響以及避免收不到回波信號的情況。超聲波測距傳感器旋轉掃描時,發射超聲波脈沖后,超聲波換能器發生角度偏轉,導致接收回波變小,測距范圍也會相應減小。超聲波周向掃描接收回波示意圖如圖7。

圖7 超聲波周向掃描接收回波示意圖
對掃描平臺上的超聲波傳感器回波進行分析,系統中要求超聲波換能器測距范圍為6 m,鑒于探測距離隨轉速變化,所以選擇在靜止條件下最遠探測距離10 m的超聲波換能器,如圖7中的虛線所示。超聲波周向掃描轉速為n(r/min),當發射的超聲波經距離為r、方位角為θ的目標反射后到達傳感器時,超聲波傳感器已經旋轉角度α。假設目標為全反射,聲壓不發生衰減;另外假設超聲波為球面波輻射,在空氣中傳播時只考慮擴散衰減,因此聲壓隨距離成反比衰減。那么超聲波對距離為r,方位角為θ的目標探測時的接收回波公式為:
(5)
(6)
式中:P(θ)是超聲波傳感器在θ角方向上的聲壓。將α代入式(5),且只有Pr(r,θ)大于等于超聲波傳感器能感知的最小聲壓幅值時,才能被探測到。得到公式為:
(7)
根據式(7)可知不同轉速對應不同的探測距離,如圖8、圖9所示不同轉速下單次探測的最遠距離及探測距離的變化趨勢。
由圖8可知,隨轉速的升高,超聲波測距傳感器的探測范圍不斷減小。當轉速達到500 r/min,已經無法滿足探測指標;根據圖9曲線趨勢的計算結果n≤253 r/min,即為探測距離為6 m時的最大轉速。

圖8 不同轉速下單次探測的最遠距離

圖9 探測距離變化趨勢
3.3 脈沖頻率和轉速的匹配
相鄰聲束間的夾角之和為2π,為保證每個掃描周期中的超聲波聲束數量相同且在固定角度上,則超聲波單次測距周期T與機構掃描轉速n(r/min)之間應存在如下關系:
(8)
(9)
其中:k∈Z,表示一個掃描周期內有k個探測點;T為周期;L為最大探測距離。設最大監控距離為6 m,L=6/cosβ。根據以上關系擬合曲線如圖10所示。

圖10 聲束數量與轉速關系
由圖10可知,實線以下部分為滿足條件轉速。為保證達到最大監控距離,轉速n≤253 r/min,保證k為正整數,可得出表1所示的結果。

表1 周期內探測點與轉速的關系
車輛行駛軌跡只通過探測邊緣,那么車輛通過監控區域的時間t=l/v。為了能夠捕獲到目標,必須在這段時間內保證超聲波掃描機構完成大于等于一個周期的掃描,即60/n≤t。根據上文對目標車輛的分析,具有最好波束分布的最大掃描轉速n=233 r/min,因此對于l=5 m長度的車輛目標,超聲周向掃描能夠捕獲最大速度為70.0 km/h行駛的目標。
4 原理樣機設計及掃描探測試驗
根據仿真分析得出超聲波脈沖頻率和掃描機構轉速的匹配關系,設計并加工原理樣機模型及選則傳感器。原理樣機如圖11所示。

圖11 原理樣機模型
如圖11所示電機轉子與機械旋轉零件以聯軸器可靠連接。機械旋轉件全部采用輕質鋁合金加工,保證可靠性的同時減輕質量,減小電機負載,縮短電機穩速時間。超聲波傳感器與旋轉件之間通過螺紋可靠連接。信號發射角度,超聲波傳感器探測范圍為6 m,發射信號與車身交會點取車身中部即h=2 m,得出傳感器發射角度β=18.4°。針對單聲束探測實驗如圖12所示。一輛小型轎車長約5 m,以70 km/h的速度從節點上方臨界條件處通過,取最佳匹配參數、轉速n=100 r/min和轉速n=300 r/min條件進行實驗。
針對3種情況分別進行10次實驗。收到回波時,通過無線監控模塊向范圍外的監控點發送數據。
1) 取最佳的匹配參數,原理樣機模型轉速調至233 r/min,通過定時器改變發射頻率f=27 Hz,汽車通過時的數據如圖13所示。
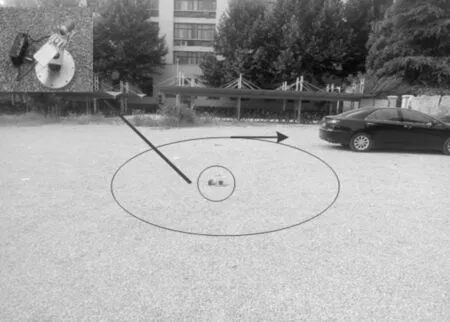
圖12 實驗場景
2) 將轉速調至300 r/min進行實驗。根據轉速與頻率的關系,可知此時超聲波聲束減少,無法實現對周圍監測,需要更改信號頻率實現全面覆蓋。當汽車通過時,監測點未收到探測數據。
3) 將轉速調至100 r/min進行實驗,此時不需要更改信號發射頻率,10次實驗中存在無效數據。

圖13 臨界條件下波形
如圖13所示,傳感器輸出PW波形寬度為37.71 ms,脈沖寬度即表示所測距離,比例因子為58 μs/cm,可知測得L=6.50 m,d=6.17 m。為保證掃描探測實驗可靠性,用原理樣機進行靜態測距實驗,靜態下測得6 m處波形為如圖14、圖15所示。

圖14 靜態測距實驗
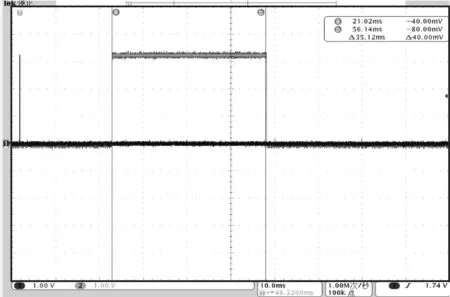
圖15 靜態6 m處回波信號
由圖15可知PW波形寬度為35.12 ms,距離為6.05 m。誤差在1%以內。掃描探測實驗最大誤差仍然在5%以內。誤差增大原因是隨著轉速增大,信號探測角度逐漸增大,導致可以接受到的回波信號變差甚至丟失。實驗結果表明:超聲脈沖頻率為27 Hz,周向掃描轉速為n=233 r/min,在6 m探測距離內的周向探測系統能有效探測目標;隨著轉速的提高,探測誤差逐漸增大以及探測距離縮短,所以對于體型更小、速度更快的目標,應該增加傳感器,形成多發多收,掃描一周的時間更短以及形成更多的超聲波波束,而不是單純的增加轉速。
5 結論
根據超聲波探測原理和掃描探測方案,提出單聲束旋轉掃描探測方案,設計出了旋轉掃描平臺。對超聲波聲場進行仿真,使用具有增強聲場和指向性的超聲傳感器,對單聲束探測捕獲目標車輛信息、回波信號與轉速匹配關系和脈沖頻率與轉速匹配關系進行數值仿真分析,計算出測距范圍內的最大轉速,確定信號脈沖頻率與電機掃描轉速的最佳匹配參數為:超聲脈沖頻率為f≥27 Hz,周向掃描轉速范圍233 r/min≤n≤253 r/min,周向掃描探測系統能捕獲6 m范圍內速度低于70 km/h的目標車輛。若要監控更高速度或更小體積的目標時,只需在旋轉機構上添加額外的傳感器。
[1] 楊波,鄒富強.異向性磁阻傳感器檢測車流量的新方法[J].浙江大學學報(工學版),2011,45(12):2109-2114.
[2] 李元實,王智,鮑明.基于無線聲陣列傳感器網絡的實時多目標跟蹤平臺設計及實驗[J].儀器儀表學報,2012,33(1):146-153.
[3] 朱海洋,張合,馬少杰.低功耗/超聲復合傳感器節點設計[J].儀器儀表學報,2014,35(10):2223-2230.
[4] 甘霖,張合,張祥金.激光近炸引信單光束脈沖周向探測技術研究[J].紅外與激光工程,2013,42(1):84-89.
[5] 查冰婷,張合.單光束脈沖激光引信掃描頻率和脈沖頻率研究[J].紅外與激光工程,2014,43(7):2081-2086.
[6] 潘仲明,賀漢根.超聲陣列障礙探測技術及其在無人車輛中的應用[J].國防科技大學學報,2009,31(2):121-125.
[7] BANGTSSON D E,NORELAND,BERGGREN M.Shape Optimization of an Acoustic Horn,Technical Report 2002-019[R].Department of Information Technology,Uppsala University,2002.
[8] 朱金臺,董曉龍,林文明.Ku波段旋轉掃描扇形波束散射計底面擴展目標在軌定標[J].電子與信息學報,2013,35(8):1793-1799.
[9] 彭映城,淺海,曹龍.一種高精度超聲測距系統設計[J].電子測量技術,2013,36(10):16-30.
[10]石新軍,孫文盛.基于氣介式聲傳感器智能雷探測系統研究[J].傳感器與微系統,2006,25(5):85-88.
(責任編輯楊繼森)
Study on Single Acoustic Beam Circumferential Detection Technology
MENG Fan-da, MA Shao-jie, ZHU Hai-yang
(National Key Laboratory of Intelligent Ammunition Technology,Nanjing University of Science and Technology, Nanjing 210094, China)
For the problems of ultrasonic detection system to space limitations and inherent blind spots, a new type of ultrasound circumferential scanning program was put forward. First of all, the rotary scanning structure was designed, which is simple and reliable and can adjust the angle of the acoustic emission signals and the rotating speed. Ultrasonic transducer with the enhanced sound field and direction is chosen according to ultrasonic sound field simulation. Secondly, on the basis of synchronous scanning scheme, best match parameter signal pulse frequency and scanning speed of the motor was confirmed according to numerical simulation analysis about single-beam probe target acquisition vehicle and the echo signal and the rotating speed and the relationship of pulse frequency and rotating speed. At last, we proposed scanning probe experiments with the use of principle prototype. The results show that target acquisition rate was analyzed. Calculating results demonstrate that the highest speed of ultrasonic circumferential scanning system is 233 r/min in the case of good compatibility when the ultrasonic pulse pace isf≥27 Hz, which can acquire the target with a speed lower than 70 km/h and verify the feasibility of ultrasonic scanning probe week. This provides basis for design of single beam ultrasonic circumferential detection system.
single acoustic beam; ultrasound probe; scanning mechanism; circumference; optimal frequency and speed
2016-08-22;
2016-09-25
國家自然科學基金項目(51275248)
孟凡達(1990—),男,碩士研究生,主要從事目標探測與識別技術,機電一體化研究;馬少杰(1967—),男,博士,教授,博士生導師,主要從事機電系統分析與設計技術和智能化機電產品設計技術研究;朱海洋(1990—),男,博士,主要從事無線傳感器網絡節點自定位與目標定位技術研究。
10.11809/scbgxb2017.01.028
孟凡達,馬少杰,朱海洋.單聲束周向旋轉掃描探測技術[J].兵器裝備工程學報,2017(1):119-124.
format:MENG Fan-da, MA Shao-jie, ZHU Hai-yang.Study on Single Acoustic Beam Circumferential Detection Technology [J].Journal of Ordnance Equipment Engineering,2017(1):119-124.
TP212;TB55
A
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
